
模数转换器 (ADC)
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
9.7 用TVS二极管保护ADC –改进的解决方案


您好!欢迎观看 TI 高精度实验室系列的
下一个视频, 本视频介绍了 ADC
电气过载方面的内容。
在上一个演示中, 我们看到
在串联限流 电阻器中使用
TVS 二极管是保护 数据转换器输入的
有效方法,但它会 对性能产生重大影响。
在本演示中, 我们将考虑使用
一些不同方法 来改善性能,
同时仍可提供 适当保护。
回忆一下上次的 演示便可了解,
TVS 二极管的 电容随施加的
反向电压而变化。
因此,对于右图 所示的电路,
电容随电压 在 0 伏到 10 伏
之间摆动而变化。
TVS 电容中的 输入电阻构成了
一个低通滤波器。
该滤波器的截止 频率随输入
信号的瞬时电压
而变化。
举例来说, 当输入信号为 5 伏时,
滤波器的截止频率 将不同于输入信号
为 10 伏时的截止频率。
因此,衰减取决于
波形的瞬时电压 ,
这会使输出波形的
形状失真,
并在测量中 引入更多的 THD。
请注意, 在此示例中,
对于接近 0 的电压, 输出信号
会跟踪输入。
但是,当输入 接近峰值时,
由于滤波器衰减,
输出不再跟踪输入。
在正常情况下,
仅看输出波形
可能很难实现。
但正如您在 幻灯片上所看到的那样,
它不再是一个纯正弦波。
在上一张幻灯片中, 我们了解到
Rp 和TVS 二极管 D1 的电容形成了
一个低通滤波器。
当输入信号 振幅改变时,
D1 的电容 会瞬时变化。
因此,截止频率
也瞬时变化。
截止频率的这种 变化会引入失真,
因为信号的衰减程度 会有所不同,
具体取决于输入 信号的瞬时振幅。
但是,如果所施加 信号的频率
远小于 二极管电容
引入的截止频率,
则失真将最小化。
该图显示了 失真如何
随输入信号频率的 增加而变得更糟。
在此示例中, 接近 100 赫兹的
THD 非常接近 此器件的额定典型 THD。
此处需要重点指出是, 通常可以通过
降低输入信号频率 来最大程度地
减小非线性电容 引入的失真。
在下一张幻灯片中, 我们将研究
TVS 二极管的额定 功率如何影响其电容。
在使用 TVS 二极管 进行输入保护时,
需要注意的一点是额定功率。
选择额定功率 更高的 TVS 二极管
会增加器件的尺寸 。
除了消耗 更多的功耗外,
更大的器件 还将具有更大的电容。
例如,额定峰值脉冲 功率为 1.5 千瓦的
TVS 二极管的 电容是 400 瓦
器件的 3.75 倍。
由于我们在 TVS 器件 前面使用了
一个串联限流电阻, 因此它不需要
很高的额定功率。
因此,通常建议使用
额定功率 低的 TVS 二极管
进行输入保护, 因为较低的电容
对失真的影响较小。
此处的计算式 与前面视频中
用于选择串联保护 电阻 Rp 的计算式相同。
由于此示例中 钳位电压的
击穿不同,因此 结果略有不同。
尽管如此,我们在这两个 示例中均使用了一个
1 千欧姆的串联电阻。
再次注意, 在此幻灯片上,
故障条件下的功耗 可能非常高。
可以通过选择较大的 Rp 值将其最小化。
让我们看看 Rp 的变化
是如何影响性能的。
该图在很宽的 Rp 电阻值范围内,
在左侧以蓝色字体 显示了 THD 性能,
在右侧以红色字体 显示了功耗。
请注意,使用小电阻器 可获得最佳性能,
但是在连续 故障事件中,
较小电阻器的
功耗会非常高。
这种关系使得 很难创建一个
可防止出现大的 稳态故障情况的
紧凑型低成本 高性能电路。
在下一张幻灯片中, 我们将考虑
一种可以用来代替 电阻器的器件。
该器件可以使 我们无需使用
大型高功率器件 即可获得更好的 THD 性能。
PTC 保险丝 是一种在正常条件下
具有低电阻, 在过流情况下
具有高电阻的器件。
PTC 代表 正温度系数。
器件的电阻 会随温度的升高而增加。
在故障情况下, 电阻器的自发热
将导致电阻器 通过跳变点,
电阻将因此
急剧增加。 大电阻
将有效地限制电流, 类似于断开的
机械保险丝。
故障条件消除后,
PTC 将返回 低电阻状态。
但是,该器件具有 一定的滞后性,
并且需要一些时间 才能使其冷却下来,
此外电阻恢复到缓慢的 稳态值也需要一定的时间。
这种行为对我们的 输入保护电路很有用,
因为在正常的 未跳变状态下,
串联电阻会很低, 这会使失真
保持相对较低。
电阻将增加或跳变,
以响应故障电流, 从而限制功耗
并保护 ADC。
在下一张幻灯片中, 我们将比较几个 PTC 保险丝,
然后检查它们 对性能的影响。
此幻灯片显示了几种 不同 PTC 保险丝的列表。
我们将选择额定 电压为 60 伏、
跳变电流最低的器件。
另外,请注意 跳变后电阻
和初始电阻 相对较低。
在下一张幻灯片中, 我们将研究 PTC
保险丝如何影响 THD 性能。
之前,我们介绍了 具有 1 千欧姆
限流电阻的 SMAJ10CA TVS 二极管。
在 40 伏故障条件下, 1 千欧姆电阻器
限制了电流和功耗,
因此需要 1 瓦的 外部电阻。
这种解决方案成本高昂, 并且在 PCB 上占用很大的面积。
此外,与数据表 规格相比,
带有 TVS 二极管 和 1 千欧姆电阻的
器件的交流性能
会大大降低。
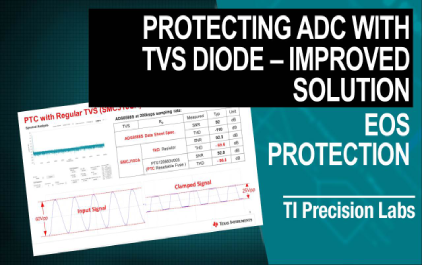
提醒一下, ADC 的 THD
规格为负 110dB。
在加上 TVS 二极管 和 1 千欧姆电阻后,
测得的 THD 为 负 69.6dB。
用 PTC 保险丝 替换 TVS 二极管
可将测得的 THD 提高到负 96.8dB。
因此,PTC 保险丝的 低稳态电阻
可以显著提高 保护电路的
交流性能, 但仍不能满足
负 110dB 的 数据表规格。
此外还需注意, PTC 保险丝的解决方案
尺寸比 1 瓦电阻器 解决方案小得多。
幻灯片底部的 波形显示了
输入故障信号。
且其后产生的 故障信号
已由 TVS 二极管声明。
在高精度实验室 讲座的此部分内容中,
我们一直在研究
集成模拟前端的 数据转换器。
这些器件使用内部 齐纳钳位二极管
和 SCR ESD 钳位。
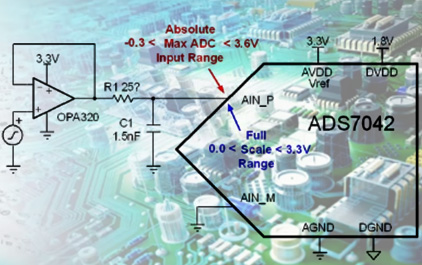
这些数据转换器的 输入范围通常为
正/负 10 伏,
但模拟电源 电压仅为 5 伏。
通常,这种类型的 系统将不支持
高于 5 伏的 电压源。
因此,与接地连接 且不需要高压
电源的外部 TVS 二极管保护
解决方案 很有吸引力。
在高压电源 可用的情况下,
肖特基钳位二极管 是更好的解决方案。
推荐使用肖特基 解决方案,因为
肖特基钳位组的 电压通常比 TVS 的
击穿电压更精确。
此外,肖特基二极管 比 TVS 二极管
具有更低的 电容,因此
对失真的影响较小。
在本示例中, 我们将 ADS8588S 的
输入电压钳制为 正/负 12 伏。
从技术上讲, 实际钳位电压
将包括二极管 压降,因此在使用
肖特基二极管时, 它的电压约为
正/负 12.3 伏。
让我们看一下 该解决方案的
器件选择和性能。
此幻灯片演示了 如何为上一张
幻灯片中讨论的 肖特基保护方法
选择串联限流电阻。
首先,我们将 故障电流限制
设置为肖特基 二极管的最大正向
连续电流的 10%。
在本示例中, BAT42 的最大
正向电流 为 200 毫安,
因此我们将故障电流 设置为 20 毫安。
通过左侧的 特性曲线,
我们可以看到 二极管的正向
压降为 0.4 伏。
明白了这一点后, 我们可以通过
从故障电压中 减去电源和
二极管压降 来计算故障条件下
保护电阻两端的压降。
用保护电阻 两端的电压
除以故障电流 可得出保护电阻的
最小值。
保护电阻的值 也受由此产生的
功耗的限制。
这可通过 将保护电阻器
压降的平方除以功耗 来计算。
最后,从这些方程式的 计算结果中,
选择 Rp 的 最大值,
并将其四舍五入到 最接近的标准电阻器值。
让我们看一下
电路的测量性能。
这是我们刚刚 设计的带有
肖特基二极管保护 电路的 ADS8588S 的
测量性能。
看看 FFT,您会 发现失真很小。
本设计测得的 SNR 和 THD 非常
接近 ADC 的 数据表规格。
总体而言,由于 肖特基具有
低于 TVS 的 反向电容,
因此肖特基电路的 性能将优于 TVS 型
保护电路。
幻灯片 右下角的图表
显示了故障 情况下的电路输出。
此幻灯片显示了 相同的肖特基
保护电路,其中 1.52 千欧姆的限流电阻器
被 PTC 保险丝代替。
在此示例中, PTC 的较低电阻
有助于减小失真, 从而使性能
符合 ADC 的 数据表规格。
根据 ADS8588S 数据表规格,
SNR 通常为 92dB, THD 为负 110dB。
测量结果表明, 该保护电路的
SNR 为 92.1dB, THD 为负 111dB。
右下角的时域图
显示了钳位 过载信号。
本视频到此结束。
谢谢观看。
请尝试完成测验以 检查您对本视频
内容的理解。
问题 1.
使用额定功率 更高的 TVS
可能有什么缺点?
正确答案是 D, 电容会更高。
这是考虑使用 低功耗 TVS 二极管的
重要原因。
问题 2.
在 TVS 二极管之前 使用较大的
串联电阻有什么好处?
正确答案是 A, 可以使用较低
额定功率的电阻器。
在大多数情况下, 极低的串联电阻
将提供 最佳的 THD 性能。
但遗憾的是, 故障条件下的
功耗可能太高。
问题 3.
将 PTC 保险丝与 TVS 二极管一起使用
有什么好处?
正确的答案是 E, A 和 B。记住,
失真是由串联电阻 与 TVS 二极管的
非线性电容的 相互作用引起的。
因此,具有较小电阻的 PTC 保险丝将使失真最小化。
而且,在故障情况下 PTC 的电阻会增加,
因此可以使用 较低的额定功率
和较小的物理器件。
问题 4.
一个系统有两个 可用的电源轨:3.3 伏
和 5 伏。
ADC 具有 10 伏 输入范围。
肖特基输入电路 可以用来保护器件吗?
正确答案是 B,不可以。
原因是我们需要 10 伏电源来保护
肖特基型输入 保护的 10 伏
输入范围。
如果没有可用的电源, 那么最好的选择是
使用 TVS 型保护。
问题 5.
假设保护电路 引起失真,
应如何减少失真?
正确答案是 D, 降低输入信号
频率。
降低输入 信号频率
可使信号进一步 远离 TVS 二极管
形成的非线性低通 滤波器的截止频率。
-
 未学习 1.1 数据转换器介绍 - 直流参数
未学习 1.1 数据转换器介绍 - 直流参数
-
 未学习 1.2 数据转换器介绍 - 交流和直流参数
未学习 1.2 数据转换器介绍 - 交流和直流参数
-
 未学习 2.1 数据转换器介绍 - SAR型ADC输入类型
未学习 2.1 数据转换器介绍 - SAR型ADC输入类型
-
 未学习 2.2.1 单端驱动电路分析
未学习 2.2.1 单端驱动电路分析
-
 未学习 2.2.2 反向配置与轨对轨放大器的交越失真
未学习 2.2.2 反向配置与轨对轨放大器的交越失真
-
 未学习 2.3.1 交越失真实验所需硬件软件
未学习 2.3.1 交越失真实验所需硬件软件
-
 未学习 2.3.2 交越失真实验软件设置
未学习 2.3.2 交越失真实验软件设置
-
 未学习 2.3.3 交越失真实验结果
未学习 2.3.3 交越失真实验结果
-
 未学习 2.4.1 仪表放大器输入范围计算
未学习 2.4.1 仪表放大器输入范围计算
-
 未学习 2.4.2 使用软件验证仪表放大器输入共模范围
未学习 2.4.2 使用软件验证仪表放大器输入共模范围
-
 未学习 2.5.1 全差分放大器及失真
未学习 2.5.1 全差分放大器及失真
-
 未学习 2.5.2 全差分驱动电路设计
未学习 2.5.2 全差分驱动电路设计
-
 未学习 3.1 误差分析背后的统计学知识
未学习 3.1 误差分析背后的统计学知识
-
 未学习 3.2 理解与校准ADC系统的偏移和增益误差
未学习 3.2 理解与校准ADC系统的偏移和增益误差
-
 未学习 3.3 使用蒙特卡罗SPICE工具进行误差统计分析
未学习 3.3 使用蒙特卡罗SPICE工具进行误差统计分析
-
 未学习 4.1 计算ADC系统的总噪声
未学习 4.1 计算ADC系统的总噪声
-
 未学习 4.2 动手实验-ADC噪声
未学习 4.2 动手实验-ADC噪声
-
 未学习 4.3 ADC 系统中的噪声
未学习 4.3 ADC 系统中的噪声
-
 未学习 4.4 ADC 噪声测量、方法和参数
未学习 4.4 ADC 噪声测量、方法和参数
-
 未学习 4.5 低速 Δ-Σ ADC 的系统噪声性能
未学习 4.5 低速 Δ-Σ ADC 的系统噪声性能
-
 未学习 4.6 分析和计算 ADC 系统中的噪声带宽——多级滤波器
未学习 4.6 分析和计算 ADC 系统中的噪声带宽——多级滤波器
-
 未学习 4.7 分析和计算 ADC 系统中的噪声带宽——数字滤波器
未学习 4.7 分析和计算 ADC 系统中的噪声带宽——数字滤波器
-
 未学习 4.8 增益对噪声、ADC FSR 和动态范围的影响
未学习 4.8 增益对噪声、ADC FSR 和动态范围的影响
-
 未学习 4.9 计算放大器 + ADC 总噪声:设计示例
未学习 4.9 计算放大器 + ADC 总噪声:设计示例
-
 未学习 4.10 ADC 系统中的参考噪声简介
未学习 4.10 ADC 系统中的参考噪声简介
-
 未学习 4.11 参考噪声对信号链性能的影响
未学习 4.11 参考噪声对信号链性能的影响
-
 未学习 4.12 降低参考噪声
未学习 4.12 降低参考噪声
-
 未学习 5.1 频域介绍
未学习 5.1 频域介绍
-
 未学习 5.2 快速傅立叶变换及加窗函数
未学习 5.2 快速傅立叶变换及加窗函数
-
 未学习 5.3 改善频率指标的方法:相干采样及滤波
未学习 5.3 改善频率指标的方法:相干采样及滤波
-
 未学习 5.4 混叠及抗混叠滤波器
未学习 5.4 混叠及抗混叠滤波器
-
 未学习 5.5 实验 - 混叠和抗混叠滤波器
未学习 5.5 实验 - 混叠和抗混叠滤波器
-
 未学习 6.1 SAR ADC及其器件选型
未学习 6.1 SAR ADC及其器件选型
-
 未学习 6.2 驱动放大器的选型和验证
未学习 6.2 驱动放大器的选型和验证
-
 未学习 6.3 建立SAR ADC的仿真模型
未学习 6.3 建立SAR ADC的仿真模型
-
 未学习 6.4 如何计算RC滤波器的值
未学习 6.4 如何计算RC滤波器的值
-
 未学习 6.5 最终的仿真验证
未学习 6.5 最终的仿真验证
-
 未学习 6.6 滤波器RC选型的理论计算方法
未学习 6.6 滤波器RC选型的理论计算方法
-
 未学习 6.7 R-C组件选择背后的数学
未学习 6.7 R-C组件选择背后的数学
-
 未学习 7.1 电压基准概述
未学习 7.1 电压基准概述
-
 未学习 7.2 参考驱动器拓扑概述
未学习 7.2 参考驱动器拓扑概述
-
 未学习 7.3 了解SAR参考输入模型
未学习 7.3 了解SAR参考输入模型
-
 未学习 7.4 开发SAR输入参考模型
未学习 7.4 开发SAR输入参考模型
-
 未学习 7.5 驱动参考实验
未学习 7.5 驱动参考实验
-
 未学习 7.6 ADC:SAR 基准输入 - CDAC
未学习 7.6 ADC:SAR 基准输入 - CDAC
-
 未学习 8.1 SAR ADC功率调节
未学习 8.1 SAR ADC功率调节
-
 未学习 8.2 动手实验 - 系统功率调节
未学习 8.2 动手实验 - 系统功率调节
-
 未学习 9.1 EOS和ESD
未学习 9.1 EOS和ESD
-
 未学习 9.3 向TINA 导入二极管PSpice模型
未学习 9.3 向TINA 导入二极管PSpice模型
-
 未学习 9.4 通过高压放大器保护低压ADC
未学习 9.4 通过高压放大器保护低压ADC
-
 未学习 9.5 保护低压ADC-改进的解决方案
未学习 9.5 保护低压ADC-改进的解决方案
-
 未学习 9.6 用TVS二极管保护ADC
未学习 9.6 用TVS二极管保护ADC
-
 未学习 9.7 用TVS二极管保护ADC –改进的解决方案
未学习 9.7 用TVS二极管保护ADC –改进的解决方案
-
 未学习 10.1 了解和比较高速模数(ADC)和数模转换器(DAC)转换器架构
未学习 10.1 了解和比较高速模数(ADC)和数模转换器(DAC)转换器架构
-
 未学习 10.2 抖动对高速模数转换器(ADC)信噪比(SNR)的影响
未学习 10.2 抖动对高速模数转换器(ADC)信噪比(SNR)的影响
-
 未学习 10.3了解高速数据转换器中的信噪比(SNR)和噪声频谱密度(NSD)
未学习 10.3了解高速数据转换器中的信噪比(SNR)和噪声频谱密度(NSD)
-
 未学习 10.4 带宽与频率 - 子采样概念
未学习 10.4 带宽与频率 - 子采样概念
-
 未学习 10.5 高速数据转换器中的采样率与数据速率,抽取(DDC)和插值(DUC)概念
未学习 10.5 高速数据转换器中的采样率与数据速率,抽取(DDC)和插值(DUC)概念
-
 未学习 10.6 频率和采样率规划:了解高速ADC中的采样,奈奎斯特区,谐波和杂散性能
未学习 10.6 频率和采样率规划:了解高速ADC中的采样,奈奎斯特区,谐波和杂散性能
-
 未学习 10.7 高速数据转换器信号处理:真实和复杂的调制
未学习 10.7 高速数据转换器信号处理:真实和复杂的调制
-
未学习 (中文)11.1 ADC 系统中的噪声
-
未学习 (中文)11.3 ADC 噪声测量、方法和参数
-
未学习 (中文)11.4 低速 Δ-Σ ADC 的系统噪声性能
-
未学习 (中文)11.5 分析和计算 ADC 系统中的噪声带宽——多级滤波器
-
未学习 (中文)11.6 分析和计算 ADC 系统中的噪声带宽——数字滤波器
-
未学习 (中文)11.7 增益对噪声、ADC FSR 和动态范围的影响
-
未学习 (中文)11.8 计算放大器 + ADC 总噪声:设计示例
-
未学习 (中文)11.9 ADC 系统中的参考噪声简介
-
未学习 (中文)11.10 参考噪声对信号链性能的影响
-
未学习 (中文)11.11 降低参考噪声
-
 未学习 动手实验:放大器稳定和电荷桶滤波器设计
未学习 动手实验:放大器稳定和电荷桶滤波器设计
-
 未学习 无需放大器即可驱动 SAR ADC
未学习 无需放大器即可驱动 SAR ADC
-
 未学习 外部EOS保护装置
未学习 外部EOS保护装置
-
未学习 (中文)5.5 实验 - 混叠和抗混叠滤波器
-
未学习 (中文)6.7 R-C组件选择背后的数学
-
未学习 (中文)7.1 电压基准概述
-
未学习 (中文)7.3 SAR 基准输入 - CDAC
-
未学习 (中文)7.4 了解SAR参考输入模型
-
未学习 (中文)7.5 开发SAR输入参考模型
-
未学习 (中文)7.6 驱动参考实验
-
未学习 (中文)8.1 SAR ADC功率调节
-
未学习 (中文)8.2 动手实验 - 系统功率调节
-
未学习 (中文)9.1 EOS和ESD
-
未学习 (中文)9.3 向TINA 导入二极管PSpice模型
-
未学习 (中文)9.4 通过高压放大器保护低压ADC
-
未学习 (中文)9.5 保护低压ADC-改进的解决方案
-
未学习 (中文)9.6 用TVS二极管保护ADC
-
未学习 (中文)9.7 用TVS二极管保护ADC –改进的解决方案
-
未学习 (中文)10.1 了解和比较高速模数(ADC)和数模转换器(DAC)转换器架构
-
未学习 (中文)10.2 抖动对高速模数转换器(ADC)信噪比(SNR)的影响
-
未学习 (中文)10.3 了解高速数据转换器中的信噪比(SNR)和噪声频谱密度(NSD)
-
未学习 (中文)10.4 带宽与频率 - 子采样概念
-
未学习 (中文)10.5 高速数据转换器中的采样率与数据速率,抽取(DDC)和插值(DUC)概念
-
未学习 (中文)10.6 频率和采样率规划:了解高速ADC中的采样,奈奎斯特区,谐波和杂散性能
-
未学习 (中文)10.7 高速数据转换器信号处理:真实和复杂的调制
-
 未学习 (中文)了解 ADC 系统中的电源噪声
未学习 (中文)了解 ADC 系统中的电源噪声
-
 未学习 (中文)时钟噪声如何影响精密 ADC 测量
未学习 (中文)时钟噪声如何影响精密 ADC 测量
-
 未学习 (中文)电源噪声降低技术
未学习 (中文)电源噪声降低技术
-
 未学习 保护 Delta-Sigma ADC:RTD 概述
未学习 保护 Delta-Sigma ADC:RTD 概述
-
 未学习 保护 Delta-Sigma ADC:输入保护电路操作
未学习 保护 Delta-Sigma ADC:输入保护电路操作
-
 未学习 保护 Δ-Σ 元件选型
未学习 保护 Δ-Σ 元件选型
-
 未学习 利用 TVS 保护 Δ-Σ:性能影响
未学习 利用 TVS 保护 Δ-Σ:性能影响
-
 未学习 保护 Δ-Σ ADC:特殊输入范围
未学习 保护 Δ-Σ ADC:特殊输入范围
-
 未学习 PCB 布线阻抗匹配
未学习 PCB 布线阻抗匹配
-
 未学习 去耦电容
未学习 去耦电容
-
 未学习 SAR 和 Δ-Σ:噪声和驱动注意事项
未学习 SAR 和 Δ-Σ:噪声和驱动注意事项
-
 未学习 电磁兼容测试方法及标准
未学习 电磁兼容测试方法及标准
-
 未学习 3线RTD系统的挑战
未学习 3线RTD系统的挑战
-
 未学习 设计软件与硬件可配置的多 RTD 测量系统
未学习 设计软件与硬件可配置的多 RTD 测量系统
-
 未学习 混叠和抗混叠滤波器
未学习 混叠和抗混叠滤波器
-
 未学习 SAR 和 delta-sigma:基本操作
未学习 SAR 和 delta-sigma:基本操作
-
 未学习 数字滤波器和延迟
未学习 数字滤波器和延迟
-
 未学习 选择SAR或delta-sigma
未学习 选择SAR或delta-sigma
















































































 视频简介
视频简介
9.7 用TVS二极管保护ADC –改进的解决方案
介绍用TVS二极管保护ADC –改进的解决方案。

