
模数转换器 (ADC)
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
3.1 误差分析背后的统计学知识



大家好,欢迎来到TI ADC高精度实验室
讨论误差分析背后的统计学知识
在这里,我们将会特别学习
ADC数据手册里
各项规格指标的典型值与最大值
在统计学上的含义
此外,我们还会考虑
对于典型数值的最坏情况分析和统计分析之间的区别
为了更好的理解计算一个系统中总偏移误差的概念
我们从一个基本的误差分析开始
幻灯片上展示的,是用于这次误差分析的势力电路
这是一个高边电流采样监测电路
用于监测50MA—20A之间的电流
我们看看,在考虑所有信号链物件时
ADC上所看到的总偏移误差
电流感应放大器U1增益是20倍
所以输出偏移误差会放大20倍
缓冲器U2,增益是1
所以U1输出的偏移误差会直接叠加到U2和ADCU3的偏移误差上
一个通常的做法,是每个器件的最大偏移误差直接相加
来得到最坏情况的偏移误差
然而,这种计算方式
是假设所有三个物件同时存在最坏情况下的偏移误差
那所有最坏情况同时出现的概率有多大呢
我们将在下面几页幻灯片上讨论
这也幻灯片,展示了
ADC数据手册里面各项规格指标的典型值
与最大值背后的统计学背景
对于一个均值为0的指标
典型值,就是在高斯分布的均值上
叠加正负一个标准差之后的绝对值
一般来说,误差取得的均值都接近0
所以,为了方便讨论
这里我们假设器件的均值为0
在这个例子中,ADS8860的典型偏移误差是正负一个毫伏
对应正负一个标准差
最大偏移误差是一个测试参数
所有超过这个最大期间的器件都会被丢弃
而不会出货给客户
因此,这个分布曲线,其实是一个截断的高斯分布
因为没有高于最大值,和低于最小值的分布数据
通常,最大值设置为正负三个标准差
在这个例子中,你可以看到
ADS8860的最大值被设置为正负四个标准差
那这样的话,68.2%的器件都会落在这个典型值的范围内
从统计学角度看
我们找到一个有最大偏移误差的器件概率有多大
对于这个例子
就是我们要找到一个偏移误差为正负四毫伏的ADS8860的可能性有多大
因为概率等于概率分布曲线的下面的面积
在单独一个点下面积为0
也就是概率为0
这意义不大
所以,我们考虑在最大误差值附近的概率
在这个例子中误差在2MV和4MV之间的概率是2.272%
所以,在数据手册直方图上
你看不到正负三个毫伏和正负四个毫伏上有分布
这也是合理的
下面,我们会使用统计信息
找到我们势力电电路中所有三个器件
在最坏情况附近的偏移误差的符合概率
这里,我们展示了三个器件
基于数据手册的偏移误差的高斯分布
三个器件都在最坏情况的概率是多少呢
你可以看见,每个器件在两个标准差以上
也就是最坏情况附近的误差概率
大概是2%
因为三个分布是随机并且不相关的
所以,三个最坏情况,并且同时发生的符合概率
是三个概率的乘积
通过计算,你可以看到
所有器件都在最坏情况附近的概率为0.0011%
你可以想象
随着系统中的器件数量增加
所有器件都在最坏情况的概率非常小
所以,直接把每个器件的最坏情况进行叠加
并不是理解系统总误差的最好方法
下面,我们会看一个可以在统计上更好理解误差的方法
这里,我们展示了信号链中
所有三个器件的偏移误差的概率分布
我们会叠加三个分布
而不是三个最大值
不相关的高斯分布标准差
可以通过计算均方根的方式进行叠加
正如我们前面所提到
在这个例子里
所有的误差分布都是参照ADC的输入端
所以,U1的偏移误差要乘以增益20
经过公式的计算
偏移误差分布标准差典型值的叠加结果是±1.887MV
最终系统,总偏移误差分布的标准差
是±1.887MV
也就是说,系统偏移误差的典型值是1.887MV
但是,系统的最大偏移误差是多少呢
最大值,可以根据系统指标风险容忍度来设定
这个表格,展示了不同标准差的数量
对应极限内的样本百分比
例如,如果系统的最大指标设定为正负三个标准差
那么,99.73%的器件就会在极限值以内
0.27%的器件就会落到极限值以外
这取决于系统要求
我们可以设置一个更为保守的极限值
我们必须意识到
对于绝大部分指标,例如偏移误差来说
还会有其他影响总误差的因素
小心不要把统计极限值调整到最坏情况极限值以外
另外,请记住
器件的实际分布是一个截断的高斯分布
所以叠加分布也会在我们前面计算的最坏情况下截断
感谢观看本视频,请尝试完成小测验,以巩固你对本视频内容的理解
-
 未学习 1.1 数据转换器介绍 - 直流参数
未学习 1.1 数据转换器介绍 - 直流参数
-
 未学习 1.2 数据转换器介绍 - 交流和直流参数
未学习 1.2 数据转换器介绍 - 交流和直流参数
-
 未学习 2.1 数据转换器介绍 - SAR型ADC输入类型
未学习 2.1 数据转换器介绍 - SAR型ADC输入类型
-
 未学习 2.2.1 单端驱动电路分析
未学习 2.2.1 单端驱动电路分析
-
 未学习 2.2.2 反向配置与轨对轨放大器的交越失真
未学习 2.2.2 反向配置与轨对轨放大器的交越失真
-
 未学习 2.3.1 交越失真实验所需硬件软件
未学习 2.3.1 交越失真实验所需硬件软件
-
 未学习 2.3.2 交越失真实验软件设置
未学习 2.3.2 交越失真实验软件设置
-
 未学习 2.3.3 交越失真实验结果
未学习 2.3.3 交越失真实验结果
-
 未学习 2.4.1 仪表放大器输入范围计算
未学习 2.4.1 仪表放大器输入范围计算
-
 未学习 2.4.2 使用软件验证仪表放大器输入共模范围
未学习 2.4.2 使用软件验证仪表放大器输入共模范围
-
 未学习 2.5.1 全差分放大器及失真
未学习 2.5.1 全差分放大器及失真
-
 未学习 2.5.2 全差分驱动电路设计
未学习 2.5.2 全差分驱动电路设计
-
 未学习 3.1 误差分析背后的统计学知识
未学习 3.1 误差分析背后的统计学知识
-
 未学习 3.2 理解与校准ADC系统的偏移和增益误差
未学习 3.2 理解与校准ADC系统的偏移和增益误差
-
 未学习 3.3 使用蒙特卡罗SPICE工具进行误差统计分析
未学习 3.3 使用蒙特卡罗SPICE工具进行误差统计分析
-
 未学习 4.1 计算ADC系统的总噪声
未学习 4.1 计算ADC系统的总噪声
-
 未学习 4.2 动手实验-ADC噪声
未学习 4.2 动手实验-ADC噪声
-
 未学习 4.3 ADC 系统中的噪声
未学习 4.3 ADC 系统中的噪声
-
 未学习 4.4 ADC 噪声测量、方法和参数
未学习 4.4 ADC 噪声测量、方法和参数
-
 未学习 4.5 低速 Δ-Σ ADC 的系统噪声性能
未学习 4.5 低速 Δ-Σ ADC 的系统噪声性能
-
 未学习 4.6 分析和计算 ADC 系统中的噪声带宽——多级滤波器
未学习 4.6 分析和计算 ADC 系统中的噪声带宽——多级滤波器
-
 未学习 4.7 分析和计算 ADC 系统中的噪声带宽——数字滤波器
未学习 4.7 分析和计算 ADC 系统中的噪声带宽——数字滤波器
-
 未学习 4.8 增益对噪声、ADC FSR 和动态范围的影响
未学习 4.8 增益对噪声、ADC FSR 和动态范围的影响
-
 未学习 4.9 计算放大器 + ADC 总噪声:设计示例
未学习 4.9 计算放大器 + ADC 总噪声:设计示例
-
 未学习 4.10 ADC 系统中的参考噪声简介
未学习 4.10 ADC 系统中的参考噪声简介
-
 未学习 4.11 参考噪声对信号链性能的影响
未学习 4.11 参考噪声对信号链性能的影响
-
 未学习 4.12 降低参考噪声
未学习 4.12 降低参考噪声
-
 未学习 5.1 频域介绍
未学习 5.1 频域介绍
-
 未学习 5.2 快速傅立叶变换及加窗函数
未学习 5.2 快速傅立叶变换及加窗函数
-
 未学习 5.3 改善频率指标的方法:相干采样及滤波
未学习 5.3 改善频率指标的方法:相干采样及滤波
-
 未学习 5.4 混叠及抗混叠滤波器
未学习 5.4 混叠及抗混叠滤波器
-
 未学习 5.5 实验 - 混叠和抗混叠滤波器
未学习 5.5 实验 - 混叠和抗混叠滤波器
-
 未学习 6.1 SAR ADC及其器件选型
未学习 6.1 SAR ADC及其器件选型
-
 未学习 6.2 驱动放大器的选型和验证
未学习 6.2 驱动放大器的选型和验证
-
 未学习 6.3 建立SAR ADC的仿真模型
未学习 6.3 建立SAR ADC的仿真模型
-
 未学习 6.4 如何计算RC滤波器的值
未学习 6.4 如何计算RC滤波器的值
-
 未学习 6.5 最终的仿真验证
未学习 6.5 最终的仿真验证
-
 未学习 6.6 滤波器RC选型的理论计算方法
未学习 6.6 滤波器RC选型的理论计算方法
-
 未学习 6.7 R-C组件选择背后的数学
未学习 6.7 R-C组件选择背后的数学
-
 未学习 7.1 电压基准概述
未学习 7.1 电压基准概述
-
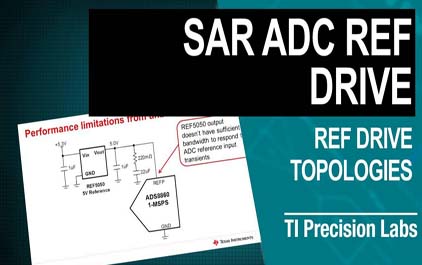 未学习 7.2 参考驱动器拓扑概述
未学习 7.2 参考驱动器拓扑概述
-
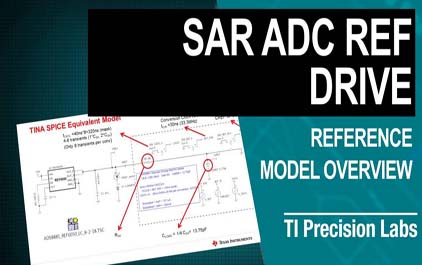 未学习 7.3 了解SAR参考输入模型
未学习 7.3 了解SAR参考输入模型
-
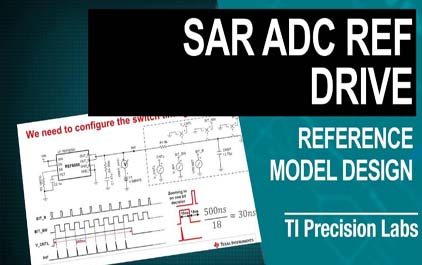 未学习 7.4 开发SAR输入参考模型
未学习 7.4 开发SAR输入参考模型
-
 未学习 7.5 驱动参考实验
未学习 7.5 驱动参考实验
-
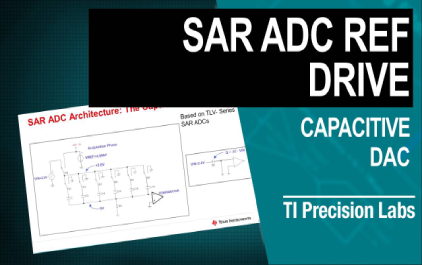 未学习 7.6 ADC:SAR 基准输入 - CDAC
未学习 7.6 ADC:SAR 基准输入 - CDAC
-
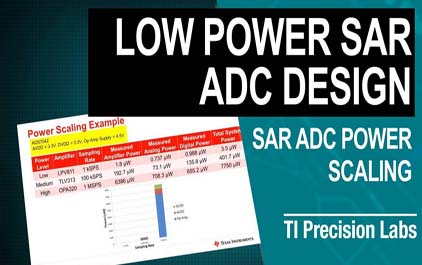 未学习 8.1 SAR ADC功率调节
未学习 8.1 SAR ADC功率调节
-
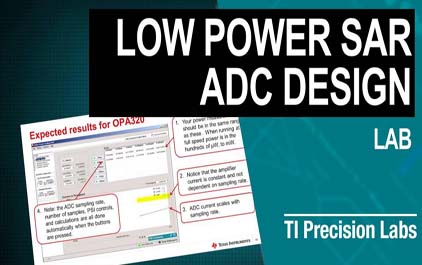 未学习 8.2 动手实验 - 系统功率调节
未学习 8.2 动手实验 - 系统功率调节
-
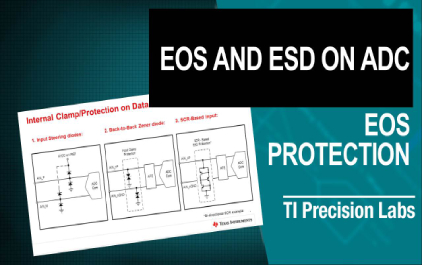 未学习 9.1 EOS和ESD
未学习 9.1 EOS和ESD
-
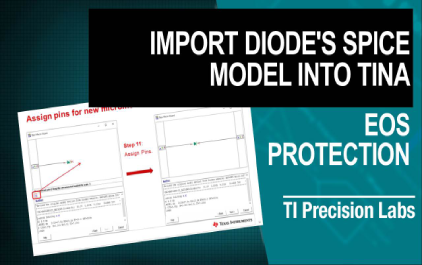 未学习 9.3 向TINA 导入二极管PSpice模型
未学习 9.3 向TINA 导入二极管PSpice模型
-
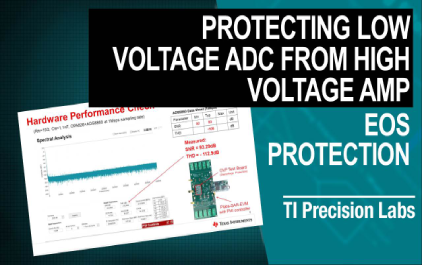 未学习 9.4 通过高压放大器保护低压ADC
未学习 9.4 通过高压放大器保护低压ADC
-
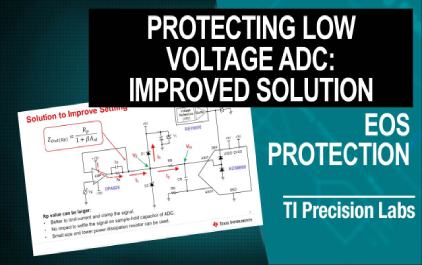 未学习 9.5 保护低压ADC-改进的解决方案
未学习 9.5 保护低压ADC-改进的解决方案
-
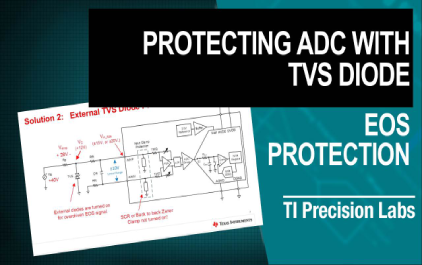 未学习 9.6 用TVS二极管保护ADC
未学习 9.6 用TVS二极管保护ADC
-
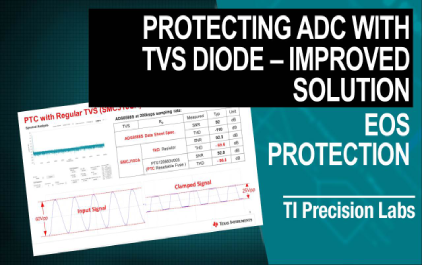 未学习 9.7 用TVS二极管保护ADC –改进的解决方案
未学习 9.7 用TVS二极管保护ADC –改进的解决方案
-
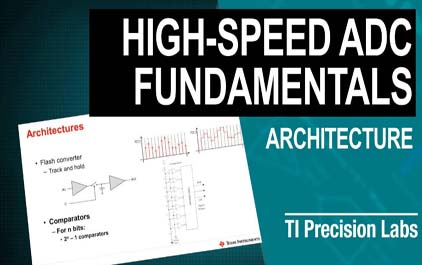 未学习 10.1 了解和比较高速模数(ADC)和数模转换器(DAC)转换器架构
未学习 10.1 了解和比较高速模数(ADC)和数模转换器(DAC)转换器架构
-
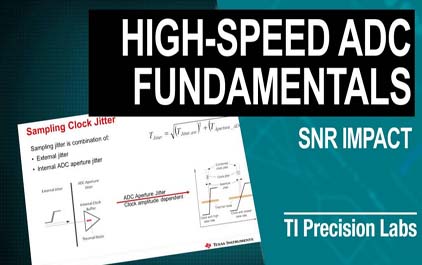 未学习 10.2 抖动对高速模数转换器(ADC)信噪比(SNR)的影响
未学习 10.2 抖动对高速模数转换器(ADC)信噪比(SNR)的影响
-
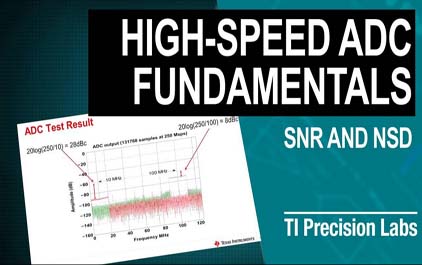 未学习 10.3了解高速数据转换器中的信噪比(SNR)和噪声频谱密度(NSD)
未学习 10.3了解高速数据转换器中的信噪比(SNR)和噪声频谱密度(NSD)
-
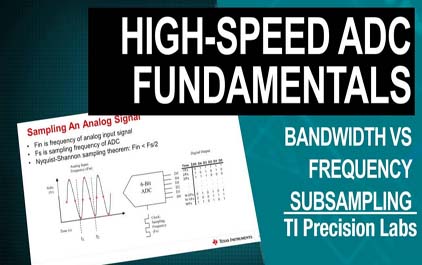 未学习 10.4 带宽与频率 - 子采样概念
未学习 10.4 带宽与频率 - 子采样概念
-
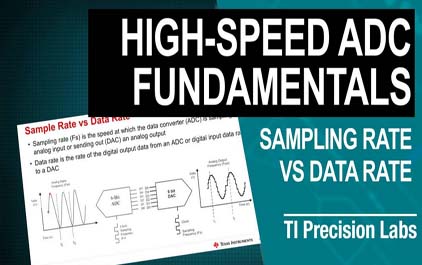 未学习 10.5 高速数据转换器中的采样率与数据速率,抽取(DDC)和插值(DUC)概念
未学习 10.5 高速数据转换器中的采样率与数据速率,抽取(DDC)和插值(DUC)概念
-
 未学习 10.6 频率和采样率规划:了解高速ADC中的采样,奈奎斯特区,谐波和杂散性能
未学习 10.6 频率和采样率规划:了解高速ADC中的采样,奈奎斯特区,谐波和杂散性能
-
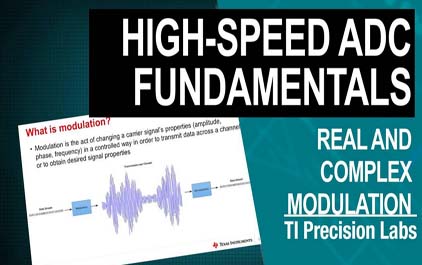 未学习 10.7 高速数据转换器信号处理:真实和复杂的调制
未学习 10.7 高速数据转换器信号处理:真实和复杂的调制
-
未学习 (中文)11.1 ADC 系统中的噪声
-
未学习 (中文)11.3 ADC 噪声测量、方法和参数
-
未学习 (中文)11.4 低速 Δ-Σ ADC 的系统噪声性能
-
未学习 (中文)11.5 分析和计算 ADC 系统中的噪声带宽——多级滤波器
-
未学习 (中文)11.6 分析和计算 ADC 系统中的噪声带宽——数字滤波器
-
未学习 (中文)11.7 增益对噪声、ADC FSR 和动态范围的影响
-
未学习 (中文)11.8 计算放大器 + ADC 总噪声:设计示例
-
未学习 (中文)11.9 ADC 系统中的参考噪声简介
-
未学习 (中文)11.10 参考噪声对信号链性能的影响
-
未学习 (中文)11.11 降低参考噪声
-
 未学习 动手实验:放大器稳定和电荷桶滤波器设计
未学习 动手实验:放大器稳定和电荷桶滤波器设计
-
 未学习 无需放大器即可驱动 SAR ADC
未学习 无需放大器即可驱动 SAR ADC
-
 未学习 外部EOS保护装置
未学习 外部EOS保护装置
-
未学习 (中文)5.5 实验 - 混叠和抗混叠滤波器
-
未学习 (中文)6.7 R-C组件选择背后的数学
-
未学习 (中文)7.1 电压基准概述
-
未学习 (中文)7.3 SAR 基准输入 - CDAC
-
未学习 (中文)7.4 了解SAR参考输入模型
-
未学习 (中文)7.5 开发SAR输入参考模型
-
未学习 (中文)7.6 驱动参考实验
-
未学习 (中文)8.1 SAR ADC功率调节
-
未学习 (中文)8.2 动手实验 - 系统功率调节
-
未学习 (中文)9.1 EOS和ESD
-
未学习 (中文)9.3 向TINA 导入二极管PSpice模型
-
未学习 (中文)9.4 通过高压放大器保护低压ADC
-
未学习 (中文)9.5 保护低压ADC-改进的解决方案
-
未学习 (中文)9.6 用TVS二极管保护ADC
-
未学习 (中文)9.7 用TVS二极管保护ADC –改进的解决方案
-
未学习 (中文)10.1 了解和比较高速模数(ADC)和数模转换器(DAC)转换器架构
-
未学习 (中文)10.2 抖动对高速模数转换器(ADC)信噪比(SNR)的影响
-
未学习 (中文)10.3 了解高速数据转换器中的信噪比(SNR)和噪声频谱密度(NSD)
-
未学习 (中文)10.4 带宽与频率 - 子采样概念
-
未学习 (中文)10.5 高速数据转换器中的采样率与数据速率,抽取(DDC)和插值(DUC)概念
-
未学习 (中文)10.6 频率和采样率规划:了解高速ADC中的采样,奈奎斯特区,谐波和杂散性能
-
未学习 (中文)10.7 高速数据转换器信号处理:真实和复杂的调制
-
 未学习 (中文)了解 ADC 系统中的电源噪声
未学习 (中文)了解 ADC 系统中的电源噪声
-
 未学习 (中文)时钟噪声如何影响精密 ADC 测量
未学习 (中文)时钟噪声如何影响精密 ADC 测量
-
 未学习 (中文)电源噪声降低技术
未学习 (中文)电源噪声降低技术
-
 未学习 保护 Delta-Sigma ADC:RTD 概述
未学习 保护 Delta-Sigma ADC:RTD 概述
-
 未学习 保护 Delta-Sigma ADC:输入保护电路操作
未学习 保护 Delta-Sigma ADC:输入保护电路操作
-
 未学习 保护 Δ-Σ 元件选型
未学习 保护 Δ-Σ 元件选型
-
 未学习 利用 TVS 保护 Δ-Σ:性能影响
未学习 利用 TVS 保护 Δ-Σ:性能影响
-
 未学习 保护 Δ-Σ ADC:特殊输入范围
未学习 保护 Δ-Σ ADC:特殊输入范围
-
 未学习 PCB 布线阻抗匹配
未学习 PCB 布线阻抗匹配
-
 未学习 去耦电容
未学习 去耦电容
-
 未学习 SAR 和 Δ-Σ:噪声和驱动注意事项
未学习 SAR 和 Δ-Σ:噪声和驱动注意事项
-
 未学习 电磁兼容测试方法及标准
未学习 电磁兼容测试方法及标准
-
 未学习 3线RTD系统的挑战
未学习 3线RTD系统的挑战
-
 未学习 设计软件与硬件可配置的多 RTD 测量系统
未学习 设计软件与硬件可配置的多 RTD 测量系统
-
 未学习 混叠和抗混叠滤波器
未学习 混叠和抗混叠滤波器
-
 未学习 SAR 和 delta-sigma:基本操作
未学习 SAR 和 delta-sigma:基本操作
-
 未学习 数字滤波器和延迟
未学习 数字滤波器和延迟
-
 未学习 选择SAR或delta-sigma
未学习 选择SAR或delta-sigma

















































































