
电源管理
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
1.2 LM5175控制的升降压变换器工作原理

那我们第二部分重点要介绍
四开关升降压变换器的基本的工作方式
接下来我们就会重点介绍
四开关升降压变换器的主功率拓扑
以及它的控制策略
首先我们讲一下它的主功率拓扑
那在这边我们可以看到
左边是四开关升降压变换器的降压部分
我们叫 Buck Leg
就是它的 Buck 桥臂
那它和传统的 Buck 变换器一样
由主开关管和同步整流管组成
那右侧就是它的 Boost Leg
也就是它的升压桥臂
由 Boost 的主开关管
和它的同步整流管组成
那么两个桥臂
共同分享一个电感以及一个 CS 电阻
左边分别是输入电容和输出电容
在控制策略上是
升降压变换器主要用的是电流控制模式
那对应于 Boost 和 Buck 模式
分别有峰值电流控制模式
和峰谷电流控制模式
在这里我们可以看到
当它工作在 Boost 模式的时候
这个电流是经过主开关管
再通过 CS 电阻
因此这里是采用了
一个峰值电流控制模式
加上它的谐波补偿
那么在 Buck 工作的时候
可以看到它的电流
是通过 CS 电阻走上了同步整流管
再通过电感走到输出
因此这里是使用峰谷控制的电流模式
那么在 Buck 和 Boost 的
这个 Transition 区域
或者我们叫做过渡区域的时候
它是工作在一个
Buck 和 Boost 交替工作的状态
那么每个工作模式的开关频率
是原来开关频率的一半
那么运用 Peak boost
和 Valley Buck 的这种控制模式
对于整个模拟系统
有一个非常大的好处
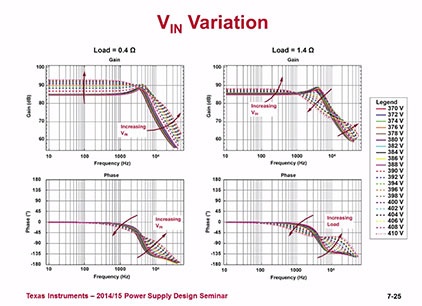
大家可以看到的
当我的输出固定
Vin 从一个最低输入电压
到一个最高输入电压的时候
它会从 Boost 到 Buck-Boost
再到最后的 Buck
那在整个变化的过程中
我的 COMP 是一个连续变化的过程
接下来我们介绍一下
在 Vin 和 Vo 比较接近的时候
整个升降压变换器会工作在
一个 Buck-Boost 的过渡阶段
或者说 Transition Mode
在这个工作模式下
它是如何进入的和如何工作的
首先我们可以看到
当输入电压比较低的时候
Buck 桥臂的主管其实是一个直通的状态
这个时候 Boost 桥臂的主管和同步整流管
在做开关的切换
那这个时候 SW1 这一点的电压
就是输入电压
SW2 的电压就是一个方波
它的最高值是 VO,最低值是地
而在输入电压比输出电压高的时候
这个时候 Buck 桥臂
是工作在一个开关状态
Boost 同步整流管这个管子是直通状态
这个时候 SW2 这一点
就等于输出电压
那 SW1 的这一点就是呈现一个方波
方波的最高值是 Vin
最低值是地
那么当我的输入电压
从一个由高往低的状态变化的时候
首先我的 Buck 会逐渐地增大它占空比
那么对应的同步整流管的占空比
会逐渐地减小
当 Buck 的同步整流管
这个管子的 off-time
或者是它的打开的时间
小于 250ns 的时候
它就会进入一个过渡模式
那同样的
当我们输入电压从低往高处走的时候
Boost 的这个主管的占空比会不停地减小
那直到它的 on-time
减少到 250ns 的时候
它也会进入到一个过渡区
那在进入到过渡区之后
分别是 SW2 也就是 Boost Leg
它开通 1/2 的开关频率
那么 SW1 就是 Buck 桥臂
它也开通 1/2 的开关频率
当 Vin 是小于 U
并且在 Transition 区域里面
这个时候 Boost 的这个占空比
通过调制了来稳定输出电压
当 Vin 大于 U
并且在这个 Transition 区域
过渡区域里面
这个时候 Buck 的主管占空比调制
来稳定这个输出电压
那 Boost 的这个主管
就工作在一个最小的导通时间
同时我们可以看到
在这个 Transition 区域两端
都是有一定的迟滞的
那这个迟滞的意义
就不让这个变换器来回地
在 Buck 和 Buck-Boost 这个过渡区域
来回地切换
使得整个系统进入一个比较混乱的状态
以上就是我们对四开关升降压变换器的
工作原理的简单介绍
感谢大家的观看和收听,谢谢
-
 未学习 1.1 碳化硅和氮化镓器件的介绍, 应用及优势
未学习 1.1 碳化硅和氮化镓器件的介绍, 应用及优势
-
 未学习 1.2 驱动器设计考虑
未学习 1.2 驱动器设计考虑
-
 未学习 1.3 开关性能
未学习 1.3 开关性能
-
 未学习 1.4 硬开关,软开关案例
未学习 1.4 硬开关,软开关案例
-
 未学习 1.5 测量
未学习 1.5 测量
-
 未学习 1.6 仿真及总结
未学习 1.6 仿真及总结
-
 未学习 1.1 TI PMBus简介课程
未学习 1.1 TI PMBus简介课程
-
 未学习 1.2 TI PMBus简介课程(一)
未学习 1.2 TI PMBus简介课程(一)
-
 未学习 1.3 TI PMBus简介课程(二)
未学习 1.3 TI PMBus简介课程(二)
-
 未学习 1.4 TI PMBus简介课程(三)
未学习 1.4 TI PMBus简介课程(三)
-
 未学习 USB Type C介绍
未学习 USB Type C介绍
-
 未学习 USB PD介绍
未学习 USB PD介绍
-
 未学习 45W单端口AC/DC方案介绍
未学习 45W单端口AC/DC方案介绍
-
 未学习 45W双端口AC/DC方案介绍
未学习 45W双端口AC/DC方案介绍
-
 未学习 1.1高频降压变化器的局限
未学习 1.1高频降压变化器的局限
-
 未学习 1.2串联电容降压变换器的工作模式
未学习 1.2串联电容降压变换器的工作模式
-
 未学习 1.3串联电容降压变换器的工作模式续
未学习 1.3串联电容降压变换器的工作模式续
-
 未学习 1.4串联电容降压变换器的主要优点
未学习 1.4串联电容降压变换器的主要优点
-
 未学习 1.5串联电容降压变换器的测试结果
未学习 1.5串联电容降压变换器的测试结果
-
 未学习 1.6串联电容降压变换器的设计要点
未学习 1.6串联电容降压变换器的设计要点
-
 未学习 1.7串联电容降压变换器的PCB
未学习 1.7串联电容降压变换器的PCB
-
 未学习 1.1反激式变压器的概论
未学习 1.1反激式变压器的概论
-
 未学习 1.2反激式变压器的磁心损耗
未学习 1.2反激式变压器的磁心损耗
-
 未学习 1.3反激式变压器的铜损
未学习 1.3反激式变压器的铜损
-
 未学习 1.4反激式变压器的漏感和嵌位电压
未学习 1.4反激式变压器的漏感和嵌位电压
-
 未学习 1.5减小反激式变压器的EMI性能
未学习 1.5减小反激式变压器的EMI性能
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结
未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结
-
 未学习 电源系统设计工具
未学习 电源系统设计工具
-
 未学习 工业及汽车系统的低EMI电源变换器设计(一)课程概览
未学习 工业及汽车系统的低EMI电源变换器设计(一)课程概览
-
 未学习 工业及汽车系统的低EMI电源变换器设计(二)工业及汽车运用DCDC的主要特点
未学习 工业及汽车系统的低EMI电源变换器设计(二)工业及汽车运用DCDC的主要特点
-
 未学习 工业及汽车系统的低EMI电源变换器设计(三)降低开关电源EMI干扰的方法
未学习 工业及汽车系统的低EMI电源变换器设计(三)降低开关电源EMI干扰的方法
-
 未学习 工业及汽车系统的低EMI电源变换器设计(四)通过优化PCB layout 有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(四)通过优化PCB layout 有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(五)通过控制开关点的Slew Rate有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(五)通过控制开关点的Slew Rate有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(六)通过频率抖动有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(六)通过频率抖动有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(七)通过增加EMI 滤波器有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(七)通过增加EMI 滤波器有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(八)— EMI 优化技巧小结
未学习 工业及汽车系统的低EMI电源变换器设计(八)— EMI 优化技巧小结
-
 未学习 1.1 开关模式电源转换器补偿简单易行 — 补偿的原因和目的
未学习 1.1 开关模式电源转换器补偿简单易行 — 补偿的原因和目的
-
 未学习 1.2 开关模式电源转换器补偿简单易行 —零点和极点
未学习 1.2 开关模式电源转换器补偿简单易行 —零点和极点
-
 未学习 1.3 开关模式电源转换器补偿简单易行 —功率级第一部分
未学习 1.3 开关模式电源转换器补偿简单易行 —功率级第一部分
-
 未学习 1.4 开关模式电源转换器补偿简单易行 —功率级第二部分
未学习 1.4 开关模式电源转换器补偿简单易行 —功率级第二部分
-
 未学习 1.5 开关模式电源转换器补偿简单易行 —反馈回路介绍
未学习 1.5 开关模式电源转换器补偿简单易行 —反馈回路介绍
-
 未学习 1.6 开关模式电源转换器补偿简单易行 —补偿实例
未学习 1.6 开关模式电源转换器补偿简单易行 —补偿实例
-
 未学习 1.7 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第一部分
未学习 1.7 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第一部分
-
 未学习 1.8 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第二部分
未学习 1.8 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第二部分
-
 未学习 1.1 升降压变换器的应用,实现方式和拓扑
未学习 1.1 升降压变换器的应用,实现方式和拓扑
-
 未学习 1.2 LM5175控制的升降压变换器工作原理
未学习 1.2 LM5175控制的升降压变换器工作原理
-
 未学习 1.3 设计举例
未学习 1.3 设计举例
-
 未学习 1.4 PCB板布局介绍
未学习 1.4 PCB板布局介绍
-
 未学习 无线传输功率(1)
未学习 无线传输功率(1)
-
 未学习 无线传输功率(2)
未学习 无线传输功率(2)
-
 未学习 多相同步升压型变换器(1)
未学习 多相同步升压型变换器(1)
-
 未学习 多相同步升压型变换器(2)
未学习 多相同步升压型变换器(2)
-
 未学习 小功率的AC/DC变换器的控制难题(1)
未学习 小功率的AC/DC变换器的控制难题(1)
-
 未学习 小功率的AC/DC变换器的控制难题(2)
未学习 小功率的AC/DC变换器的控制难题(2)
-
 未学习 德州仪器电源新产品
未学习 德州仪器电源新产品
-
 未学习 LLC 变换器小信号模型分析(上)
未学习 LLC 变换器小信号模型分析(上)
-
 未学习 LLC 变换器小信号模型分析(下)
未学习 LLC 变换器小信号模型分析(下)
-
 未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(上)
未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(上)
-
 未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(下)
未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(下)
-
 未学习 变频降压型变换器的控制策略(上)
未学习 变频降压型变换器的控制策略(上)
-
 未学习 变频降压型变换器的控制策略(下)
未学习 变频降压型变换器的控制策略(下)
-
 未学习 定频降压型变换器的控制策略(上)
未学习 定频降压型变换器的控制策略(上)
-
 未学习 定频降压型变换器的控制策略(下)
未学习 定频降压型变换器的控制策略(下)



































































