
电源管理
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
1.1 开关模式电源转换器补偿简单易行 — 补偿的原因和目的


Switch-mode power converter compensation made easy
大家好,今天我给大家来介绍一下
有关于开关电源的补偿的一些相关知识
我们会着重从以下七个方面来做这个介绍
那么它们包括补偿的原因和目的
有关于零极点的一些介绍
开关电源的功率
及 Power stage 的一些特性
主要着重在于频率响应特性
还有关于 Error amplifier 和
transconductance amplifier 的介绍
包括 Isolated feedback with optocoupler
这两个是关于反馈回路的一些特性的介绍
接下来还有 Compensation examples
我们会基于之前的介绍
然后举一些补偿的实例来加深大家的理解
那么最后还有一个
是关于 Circuit limitations
还有 other issues
那么我们今天
先着重介绍关于补偿的原因和目的
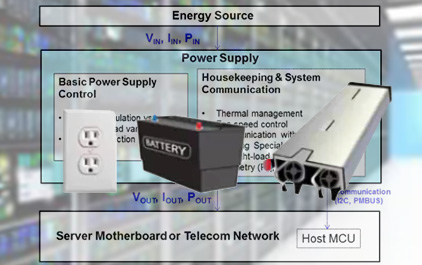
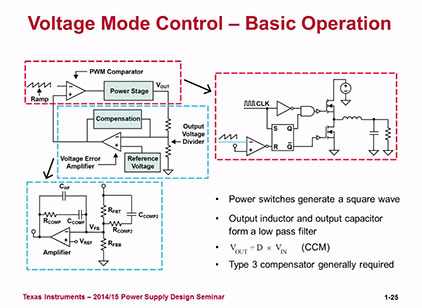
大家可以看到左边的这个 block diagram
它是一个简单的一个电源的功能示意图
那么左边呢 Vin
然后通过 Power stage 输出能量给 Vout
在正常的需求情况下
我们需要 Vout 是一个恒定的电压
那么这样我们怎么来达到这个目的
就是加了一个反馈回路
这两个分压电阻
然后把这个 Vout 的信息
通过分压电阻传递给一个放大器
那么这个放大器一端呢
是这个反馈回来的 Vout 的信号
另外一端呢是个 reference
那么通过比较呢
它把差分的信号呢
在反馈回给功率级
这样来调整功率级的输出的占空比
这样然后我们就把 Vout 可以控制在一个啊
我们需求的范围内
当这样做的时候呢
大家会意识到这是一个负反馈
那负反馈会有稳定性的问题
所以我们又加入了 Compensation network
加完 Compensation network 之后的话呢
自然而然的话我们就要考虑几个东西
一个是它的最终的带宽是多少
频率响应是什么样的
所以引入了一系列接下来我们将要探讨的问题
那就是我们怎么来处理这个补偿
那么接下来作为一个
最直观的来认识一下这个补偿
以及带宽之间的相关的关系
左边的话呢
是一个瞬态响应的一个一个例子
是什么例子
是个不太好的例子
你看这个 Iout 的话
是有一个 Step up 和 Step down
那么 Vout 会有相应的反应
这个反应就是整个这个 loop 调制时候
体现出来的一个特性
那么我们通过左边这个看的话
Vout 的反应很剧烈
然后会有很多 ringing
那这种情况下的话
它代表的是整个环路的 phase margin
不是很够
那么等一下我们会介绍什么是 phase margin
也就是说它的稳定性不是很好
虽然反应很快
那么我们再来看右边,右边的话
在同样的激励的情况下
Vout 的就没有那么多 ringing
但是恢复的稍微慢一点点
但你会感觉这个 system 为很 stable 很稳定
那么也就是说
这两个图代表的什么意思
左边的是反应快
但是稳定性差
右边呢是反应稍微慢
但是稳定性好
那这意味着什么
意味着啊我们要做一个 trade off
trade off 是什么呢
就是说我们这边 Objective
第一个叫 Maximize crossover frequency
这什么意思
是指把我们带宽尽量放到最大
就是补偿之后的 close loop 的带宽尽量增大
这样反应会最快
那就是做类似于左边这种情况
但同时呢
我们还有 Adjust compensation for best settling behavior
那右边的 settling behavior 就会很好
所以我们始终是要在左边和右边两图之间
代表两个极端情况下进行做 trade off 和优化
我们之后的内容会详细的介绍
怎么样来优化以及优化相关的参数
那么我们先来跟大家介绍一下什么是 phase margin
和 gain margin 这个之后都会一直用到
这是用来判断系统的稳定性啊
一些关键的知识
那么左边的这个图呢
我们叫 bode plot
那么红色的代表的是 gain
在这里看到的话呢是一条直线
我们 assume -20dB/decade
就是说每10倍频会下降20个db
那么灰色的话呢
是 phase
那么我们定义的 phase margin
就是当这个红色的在穿过0db的时候
这时我们读取这个 phase
就是 phase margin
当 phase 穿过零的时候
那么读取这个 gain
就是 gain margin
可以注意一下 gain margin 是个负的
我们一般情况下
为了保证系统的稳定
phase margin 建议在最小45度
然后 gain margin 10个dB
当 gain plot 过0dB的时候
我们是希望有个负 20db/decade 的这么一个斜率
那这代表了这一点的 pole 和 zero
equivalent 的是一个 pole,pole 和 zero 可以 cancel
如果你有 multiple pole 和 multiple zero
他们这里应该是互相 cancle 的
还是体现出一个 pole
这样的系统
看起来是会倾向于更加的稳定
因为 phase 不会剧烈变化
带宽,对 switching regulator 的带宽的补偿之后的带宽要求
一般是达到
switching 频率的1/5到1/10
用来远离 switching noise
好,谢谢大家
这就是我们今天讲的第一个内容
下回再见,谢谢
-
 未学习 1.1 碳化硅和氮化镓器件的介绍, 应用及优势
未学习 1.1 碳化硅和氮化镓器件的介绍, 应用及优势
-
 未学习 1.2 驱动器设计考虑
未学习 1.2 驱动器设计考虑
-
 未学习 1.3 开关性能
未学习 1.3 开关性能
-
 未学习 1.4 硬开关,软开关案例
未学习 1.4 硬开关,软开关案例
-
 未学习 1.5 测量
未学习 1.5 测量
-
 未学习 1.6 仿真及总结
未学习 1.6 仿真及总结
-
 未学习 1.1 TI PMBus简介课程
未学习 1.1 TI PMBus简介课程
-
 未学习 1.2 TI PMBus简介课程(一)
未学习 1.2 TI PMBus简介课程(一)
-
 未学习 1.3 TI PMBus简介课程(二)
未学习 1.3 TI PMBus简介课程(二)
-
 未学习 1.4 TI PMBus简介课程(三)
未学习 1.4 TI PMBus简介课程(三)
-
 未学习 USB Type C介绍
未学习 USB Type C介绍
-
 未学习 USB PD介绍
未学习 USB PD介绍
-
 未学习 45W单端口AC/DC方案介绍
未学习 45W单端口AC/DC方案介绍
-
 未学习 45W双端口AC/DC方案介绍
未学习 45W双端口AC/DC方案介绍
-
 未学习 1.1高频降压变化器的局限
未学习 1.1高频降压变化器的局限
-
 未学习 1.2串联电容降压变换器的工作模式
未学习 1.2串联电容降压变换器的工作模式
-
 未学习 1.3串联电容降压变换器的工作模式续
未学习 1.3串联电容降压变换器的工作模式续
-
 未学习 1.4串联电容降压变换器的主要优点
未学习 1.4串联电容降压变换器的主要优点
-
 未学习 1.5串联电容降压变换器的测试结果
未学习 1.5串联电容降压变换器的测试结果
-
 未学习 1.6串联电容降压变换器的设计要点
未学习 1.6串联电容降压变换器的设计要点
-
 未学习 1.7串联电容降压变换器的PCB
未学习 1.7串联电容降压变换器的PCB
-
 未学习 1.1反激式变压器的概论
未学习 1.1反激式变压器的概论
-
 未学习 1.2反激式变压器的磁心损耗
未学习 1.2反激式变压器的磁心损耗
-
 未学习 1.3反激式变压器的铜损
未学习 1.3反激式变压器的铜损
-
 未学习 1.4反激式变压器的漏感和嵌位电压
未学习 1.4反激式变压器的漏感和嵌位电压
-
 未学习 1.5减小反激式变压器的EMI性能
未学习 1.5减小反激式变压器的EMI性能
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结
未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结
-
 未学习 电源系统设计工具
未学习 电源系统设计工具
-
 未学习 工业及汽车系统的低EMI电源变换器设计(一)课程概览
未学习 工业及汽车系统的低EMI电源变换器设计(一)课程概览
-
 未学习 工业及汽车系统的低EMI电源变换器设计(二)工业及汽车运用DCDC的主要特点
未学习 工业及汽车系统的低EMI电源变换器设计(二)工业及汽车运用DCDC的主要特点
-
 未学习 工业及汽车系统的低EMI电源变换器设计(三)降低开关电源EMI干扰的方法
未学习 工业及汽车系统的低EMI电源变换器设计(三)降低开关电源EMI干扰的方法
-
 未学习 工业及汽车系统的低EMI电源变换器设计(四)通过优化PCB layout 有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(四)通过优化PCB layout 有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(五)通过控制开关点的Slew Rate有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(五)通过控制开关点的Slew Rate有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(六)通过频率抖动有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(六)通过频率抖动有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(七)通过增加EMI 滤波器有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(七)通过增加EMI 滤波器有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(八)— EMI 优化技巧小结
未学习 工业及汽车系统的低EMI电源变换器设计(八)— EMI 优化技巧小结
-
 未学习 1.1 开关模式电源转换器补偿简单易行 — 补偿的原因和目的
未学习 1.1 开关模式电源转换器补偿简单易行 — 补偿的原因和目的
-
 未学习 1.2 开关模式电源转换器补偿简单易行 —零点和极点
未学习 1.2 开关模式电源转换器补偿简单易行 —零点和极点
-
 未学习 1.3 开关模式电源转换器补偿简单易行 —功率级第一部分
未学习 1.3 开关模式电源转换器补偿简单易行 —功率级第一部分
-
 未学习 1.4 开关模式电源转换器补偿简单易行 —功率级第二部分
未学习 1.4 开关模式电源转换器补偿简单易行 —功率级第二部分
-
 未学习 1.5 开关模式电源转换器补偿简单易行 —反馈回路介绍
未学习 1.5 开关模式电源转换器补偿简单易行 —反馈回路介绍
-
 未学习 1.6 开关模式电源转换器补偿简单易行 —补偿实例
未学习 1.6 开关模式电源转换器补偿简单易行 —补偿实例
-
 未学习 1.7 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第一部分
未学习 1.7 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第一部分
-
 未学习 1.8 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第二部分
未学习 1.8 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第二部分
-
 未学习 1.1 升降压变换器的应用,实现方式和拓扑
未学习 1.1 升降压变换器的应用,实现方式和拓扑
-
 未学习 1.2 LM5175控制的升降压变换器工作原理
未学习 1.2 LM5175控制的升降压变换器工作原理
-
 未学习 1.3 设计举例
未学习 1.3 设计举例
-
 未学习 1.4 PCB板布局介绍
未学习 1.4 PCB板布局介绍
-
 未学习 无线传输功率(1)
未学习 无线传输功率(1)
-
 未学习 无线传输功率(2)
未学习 无线传输功率(2)
-
 未学习 多相同步升压型变换器(1)
未学习 多相同步升压型变换器(1)
-
 未学习 多相同步升压型变换器(2)
未学习 多相同步升压型变换器(2)
-
 未学习 小功率的AC/DC变换器的控制难题(1)
未学习 小功率的AC/DC变换器的控制难题(1)
-
 未学习 小功率的AC/DC变换器的控制难题(2)
未学习 小功率的AC/DC变换器的控制难题(2)
-
 未学习 德州仪器电源新产品
未学习 德州仪器电源新产品
-
 未学习 LLC 变换器小信号模型分析(上)
未学习 LLC 变换器小信号模型分析(上)
-
 未学习 LLC 变换器小信号模型分析(下)
未学习 LLC 变换器小信号模型分析(下)
-
 未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(上)
未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(上)
-
 未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(下)
未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(下)
-
 未学习 变频降压型变换器的控制策略(上)
未学习 变频降压型变换器的控制策略(上)
-
 未学习 变频降压型变换器的控制策略(下)
未学习 变频降压型变换器的控制策略(下)
-
 未学习 定频降压型变换器的控制策略(上)
未学习 定频降压型变换器的控制策略(上)
-
 未学习 定频降压型变换器的控制策略(下)
未学习 定频降压型变换器的控制策略(下)



































































