
电源管理
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较

大家好
我是德州仪器的系统工程师 David
今天非常高兴和大家继续分享
TI 双向 DC-DC 变换器拓扑的设计和对比
今天主要讲解
双向 DC-DC 变换器拓扑的测试结果的
开关波形和效率的对比
首先来看硬件电路的选择
考虑到功率以及尺寸
硬开关的开关频率定在 140 kHz
可以通过计算得到
满载时电感的纹波电流为 16.25A
计算出电感值为 4.7uH
所以选用 Coilcraft 的
1.86 毫欧的这个电感
软开关的开关频率满载时 100 kHz
轻载时嵌位在 450 kHz
可以通过计算得出
满载时电感的纹波电流为 65A
计算得出电感的值为 1.4 uH
所以选用 TDK 的 0.618 毫欧的电感
由于开关频率的增加
所以看到选用的线材为多股并绕的丽兹线
硬开关模式下 开关管选择英飞凌的
100 V 1.7 毫欧的管子
而软开关模式下选用的
英飞凌 80V 1.5 毫欧的管子
对于保护用的防反接的管子 48 V 的保险丝
电感电流 采样电阻 以及 48V 输入
滤波器部分 硬开关和软开关的拓扑
选择的器件都是一样的
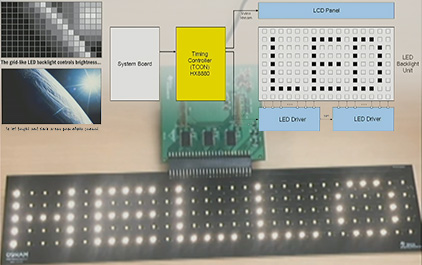
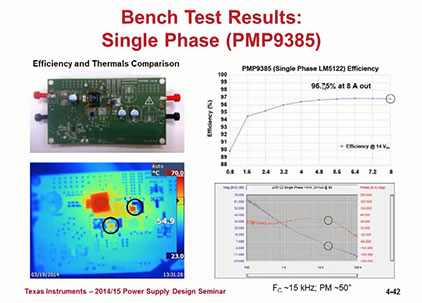
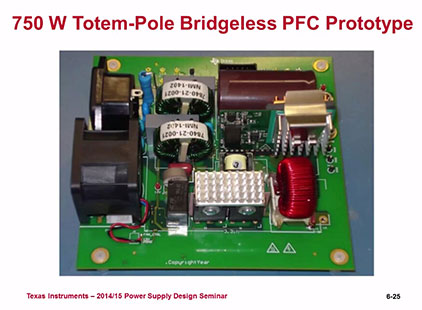
下面即为实物图
左边接 48 V 电池 右边接 12 V 电池
整机的长宽尺寸为 7.5 英寸和 5.0 英寸
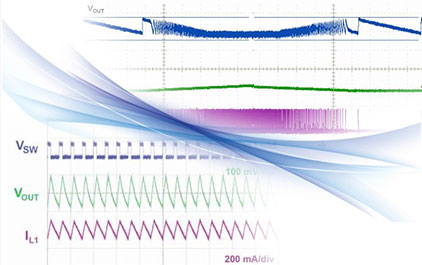
这个图显示了软开关模式下
三相的开关节点的波形
以及主项电感电流的波形
可以看到开关节点的电压的上升率比较平滑
软开关模式轻载时最大开关频率为 450 kHz
满载时开关频率为 100kHz
接下来四张图会介绍
硬开关和软开关 12 V 侧
20 A 和 110 A Buck 和 Boost 时波形对比
Buck 模式下同步管到主管开通的
死区时间为 220 ns
主管关断到同步管开通的时间
基于负载电流而变化
首先来看看 Buck 模式下12 V 侧 20 A 情况下
硬开关和软开关的开关节点
和电感电流纹波的对比
可以看到硬开关模式下有 6V 的电压过冲
软开关模式下 电压的上升率比较平滑
再看 Buck 模式下
12V 侧 110 A 波形对比
可以看到硬开关模式下
有 20V 的电压过充
软开关模式下有接近12伏的 Undershoot
这主要是因为软开关模式下
电感电流的纹波会非常大以及
PCB 板和 MOSFET 的寄生感抗的影响
再看 Boost 模式下 12V 侧 20A 波形对比
可以看到硬开关模式下电压下降得非常快
软开关模式下电压的上升率和下降率都比较平滑
最后来看 Boost 模式下 12V 侧 110A 波形对比
可以看到硬开关模式下有 20V 的电压过冲
软开关模式下有接近12伏的 Undershoot
这也是因为前面提到的软开关模下
电感的电流非常大
以及 PCB 板和 MOSFET 的寄生感抗的影响
下面即为双向运行时的开关节点波形
12V 侧电池的电流以及电感电流波形
可以通过软件设定 12V 电池
工作在 Buck 或者 Boost 模式
以及设定电流的上升时间和下降时间
设定 Buck 和 Boost 模式的理想的切换的时间
设定 48V 和 12V 电池的过压 欠压门槛值
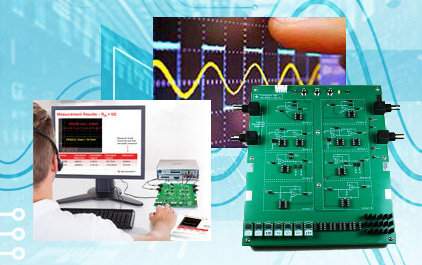
同时开发了控制的 GUI 界面
左边为 UCD3138芯片的 GUI 界面 方便软件调试
以及监控软件运行时寄存器的值
电路运行时参数的变化
右边为系统的 GUI 界面
方便系统测试 系统参数的设定
以及监控系统运行状态和电池的电压 电流
以上即为双向变换器
测试结果的开关波形和效率的对比
谢谢大家
-
 未学习 1.1 碳化硅和氮化镓器件的介绍, 应用及优势
未学习 1.1 碳化硅和氮化镓器件的介绍, 应用及优势
-
 未学习 1.2 驱动器设计考虑
未学习 1.2 驱动器设计考虑
-
 未学习 1.3 开关性能
未学习 1.3 开关性能
-
 未学习 1.4 硬开关,软开关案例
未学习 1.4 硬开关,软开关案例
-
 未学习 1.5 测量
未学习 1.5 测量
-
 未学习 1.6 仿真及总结
未学习 1.6 仿真及总结
-
 未学习 1.1 TI PMBus简介课程
未学习 1.1 TI PMBus简介课程
-
 未学习 1.2 TI PMBus简介课程(一)
未学习 1.2 TI PMBus简介课程(一)
-
 未学习 1.3 TI PMBus简介课程(二)
未学习 1.3 TI PMBus简介课程(二)
-
 未学习 1.4 TI PMBus简介课程(三)
未学习 1.4 TI PMBus简介课程(三)
-
 未学习 USB Type C介绍
未学习 USB Type C介绍
-
 未学习 USB PD介绍
未学习 USB PD介绍
-
 未学习 45W单端口AC/DC方案介绍
未学习 45W单端口AC/DC方案介绍
-
 未学习 45W双端口AC/DC方案介绍
未学习 45W双端口AC/DC方案介绍
-
 未学习 1.1高频降压变化器的局限
未学习 1.1高频降压变化器的局限
-
 未学习 1.2串联电容降压变换器的工作模式
未学习 1.2串联电容降压变换器的工作模式
-
 未学习 1.3串联电容降压变换器的工作模式续
未学习 1.3串联电容降压变换器的工作模式续
-
 未学习 1.4串联电容降压变换器的主要优点
未学习 1.4串联电容降压变换器的主要优点
-
 未学习 1.5串联电容降压变换器的测试结果
未学习 1.5串联电容降压变换器的测试结果
-
 未学习 1.6串联电容降压变换器的设计要点
未学习 1.6串联电容降压变换器的设计要点
-
 未学习 1.7串联电容降压变换器的PCB
未学习 1.7串联电容降压变换器的PCB
-
 未学习 1.1反激式变压器的概论
未学习 1.1反激式变压器的概论
-
 未学习 1.2反激式变压器的磁心损耗
未学习 1.2反激式变压器的磁心损耗
-
 未学习 1.3反激式变压器的铜损
未学习 1.3反激式变压器的铜损
-
 未学习 1.4反激式变压器的漏感和嵌位电压
未学习 1.4反激式变压器的漏感和嵌位电压
-
 未学习 1.5减小反激式变压器的EMI性能
未学习 1.5减小反激式变压器的EMI性能
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结
未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结
-
 未学习 电源系统设计工具
未学习 电源系统设计工具
-
 未学习 工业及汽车系统的低EMI电源变换器设计(一)课程概览
未学习 工业及汽车系统的低EMI电源变换器设计(一)课程概览
-
 未学习 工业及汽车系统的低EMI电源变换器设计(二)工业及汽车运用DCDC的主要特点
未学习 工业及汽车系统的低EMI电源变换器设计(二)工业及汽车运用DCDC的主要特点
-
 未学习 工业及汽车系统的低EMI电源变换器设计(三)降低开关电源EMI干扰的方法
未学习 工业及汽车系统的低EMI电源变换器设计(三)降低开关电源EMI干扰的方法
-
 未学习 工业及汽车系统的低EMI电源变换器设计(四)通过优化PCB layout 有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(四)通过优化PCB layout 有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(五)通过控制开关点的Slew Rate有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(五)通过控制开关点的Slew Rate有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(六)通过频率抖动有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(六)通过频率抖动有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(七)通过增加EMI 滤波器有效降低EMI
未学习 工业及汽车系统的低EMI电源变换器设计(七)通过增加EMI 滤波器有效降低EMI
-
 未学习 工业及汽车系统的低EMI电源变换器设计(八)— EMI 优化技巧小结
未学习 工业及汽车系统的低EMI电源变换器设计(八)— EMI 优化技巧小结
-
 未学习 1.1 开关模式电源转换器补偿简单易行 — 补偿的原因和目的
未学习 1.1 开关模式电源转换器补偿简单易行 — 补偿的原因和目的
-
 未学习 1.2 开关模式电源转换器补偿简单易行 —零点和极点
未学习 1.2 开关模式电源转换器补偿简单易行 —零点和极点
-
 未学习 1.3 开关模式电源转换器补偿简单易行 —功率级第一部分
未学习 1.3 开关模式电源转换器补偿简单易行 —功率级第一部分
-
 未学习 1.4 开关模式电源转换器补偿简单易行 —功率级第二部分
未学习 1.4 开关模式电源转换器补偿简单易行 —功率级第二部分
-
 未学习 1.5 开关模式电源转换器补偿简单易行 —反馈回路介绍
未学习 1.5 开关模式电源转换器补偿简单易行 —反馈回路介绍
-
 未学习 1.6 开关模式电源转换器补偿简单易行 —补偿实例
未学习 1.6 开关模式电源转换器补偿简单易行 —补偿实例
-
 未学习 1.7 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第一部分
未学习 1.7 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第一部分
-
 未学习 1.8 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第二部分
未学习 1.8 开关模式电源转换器补偿简单易行 —实际应用限制和常见问题第二部分
-
 未学习 1.1 升降压变换器的应用,实现方式和拓扑
未学习 1.1 升降压变换器的应用,实现方式和拓扑
-
 未学习 1.2 LM5175控制的升降压变换器工作原理
未学习 1.2 LM5175控制的升降压变换器工作原理
-
 未学习 1.3 设计举例
未学习 1.3 设计举例
-
 未学习 1.4 PCB板布局介绍
未学习 1.4 PCB板布局介绍
-
 未学习 无线传输功率(1)
未学习 无线传输功率(1)
-
 未学习 无线传输功率(2)
未学习 无线传输功率(2)
-
 未学习 多相同步升压型变换器(1)
未学习 多相同步升压型变换器(1)
-
 未学习 多相同步升压型变换器(2)
未学习 多相同步升压型变换器(2)
-
 未学习 小功率的AC/DC变换器的控制难题(1)
未学习 小功率的AC/DC变换器的控制难题(1)
-
 未学习 小功率的AC/DC变换器的控制难题(2)
未学习 小功率的AC/DC变换器的控制难题(2)
-
 未学习 德州仪器电源新产品
未学习 德州仪器电源新产品
-
 未学习 LLC 变换器小信号模型分析(上)
未学习 LLC 变换器小信号模型分析(上)
-
 未学习 LLC 变换器小信号模型分析(下)
未学习 LLC 变换器小信号模型分析(下)
-
 未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(上)
未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(上)
-
 未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(下)
未学习 基于氮化镓的图腾柱无桥 PFC(CCM)(下)
-
 未学习 变频降压型变换器的控制策略(上)
未学习 变频降压型变换器的控制策略(上)
-
 未学习 变频降压型变换器的控制策略(下)
未学习 变频降压型变换器的控制策略(下)
-
 未学习 定频降压型变换器的控制策略(上)
未学习 定频降压型变换器的控制策略(上)
-
 未学习 定频降压型变换器的控制策略(下)
未学习 定频降压型变换器的控制策略(下)



































































