
电机驱动
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
C2837x入门指南(二十八)—C2000开发所需软件工具(二)

接下来我们讲motorWare
顾名思义是电机驱动的一个软件
里面集成了TI最新的FOC的软件
InstaSPIN和FOCmotion
InstaSPIN的组合
ISTIL安装spinning TRM是安装集成
这种技术最大的特点
也就是说 你用我们的技术
你不需要做很多的操作调整
重新标定啊等等这些工作
只需要将我们的板子连接到电机
在10分钟内 可以让我们的电机转起来
而且这是无传感的技术
InstaSPIN TM motion是有传感的
会带给编码器的
我们会将速度网和[听不清]结合成一个环路
用IDC控制起来做
它的性能比较高端 而且只需要调整一个参数就可以了
InstaSPIN还有一个[听不清]的 就是方波控制
目前我们基本上把它放在motorWare之外了
MotorWare因此是FOC和InstaSPIN motion
其中InstaSPIN FOC适用于
无速传感器的 InstaSPIN motion适用于有速传感器的
比如关闭 全闭
[听不清]等等
InstaSPINmotion它 它主要是说
有一个FAST 库 也就是下载观察器
通过这个FAST库 能够输出
电机的速度信号
[听不清]角度信号 和力矩信号
同时我们的InstaSPIN FOC还具有参数辨识
电流环参数自动调整等功能
这也是为什么我们能让它旋转的一个原因
我可以用软件代码识别电机的电阻啊
电感量等电机固有的参数
MotorWare的下载地址 是www.ti.com/tool/motorware
记住先注册 登录你的TI账号
然后在这个链接地址 下载到最新的版本
这是motorware安装完 左上角是一个蓝色的小图框
然后点击双击打开后 就看到了motorWare的界面
跟[听不清]一眼 左侧是一个导航栏
右侧是它的显示内容
左侧导航栏主要包含几个 一个是InstaSPIN
FOC [听不清] motion drivers modules
其中前面两个是电机驱动的工程
后面两个是我们的底层的驱动
比如ATC PWM 或者驱动啊这些
motorWare的组件架构我们来看一下
主要的软件是放在SW也就是software里面
这里你要先找到相应的套件
我们的套件主要包含几个
一个是高压大电流的 一个是高压小电流的
一个是低压小电流的 一个的低压大电流的
主要包括这几款
还有motorpad
加入你要做一些洗衣机分机的控制的话
它是高压的220伏的小电流
也就是1000瓦以内的
因此可以选择高压的 加入你要做电动车的驱动器的话
那它是一个低压的60伏的
但它的电流比较大 可能达到两三百安培
你就可以选择8301的板子
它是外置MOS驱动
外置MOS 因此它的最大电流可以达到60安培
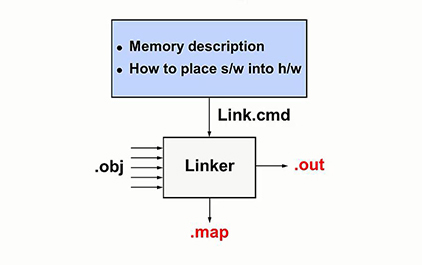
最后给大家讲讲我们的CCS
它是C2000唯一支持的编译功能
因此必须要装CCS 它的最新的版本是6.1点几
建议大家用新版本 因为新版本的功能也比较强大
软件的稳定性会比较好
同时我们要注意CCS有版本号
编译器也有版本号 同样的CCS版本
读出来都是CCS6.0
不同的CCS的编译器版本 比如一个是6.2.4
一个是6.2.11等等
这样的话 两个编译器编译出来的内容不同
因此除了关注CCS的版本外 还要关注编译器的版本
打开CCS后 就得到这样一个界面
CCS625和4比较的话
它已经非常强大 有更多的软件
供大家使用
在这个CCS里面 我们在view的resource里面
可以打开之前说的[听不清]motorWare等等
这是我今天讲的
最后给大家操作一下
我们的motorWare等等
我们先打开controlSUITE
它打开假如这个地方全部是空白的话
你在这地方把相应的文件删除掉就可以了
controlSUITE文件下 然后是这个
然后这个work space里面 把这个文件夹删掉就可以
把这个文件重新打开就可以了
我们看看它具体包含哪些东西
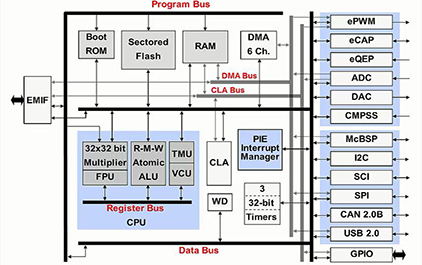
一个是device是[听不清]芯片级别
最新的有37X 都已经放好在里面了
这里面有包含了主要相关的资料
都在这里了 随便点开一个20002X看看
它包括芯片的选型 [听不清]
使用手册 然后相应的软件
然后是代码
压力代码 硬件支持等等
每个器件都有一套完整的资料
都是在device下面
下面看看[听不清]
也就是应用层相关的一些套件
我们主要有motor driver也就是电机驱动
power输出电源 solar逆变器
lighting照明等等
PLC这些资料
powerSUITE
它也集成在controlSUITE里面
这个典型的一个[听不清] 主要是用我们的demo板
来实现间接驱动 它包含了[听不清]
非[听不清] 主芯片用的是2837X
这是电机驱动一个比较完整的板子
可以试验我们各种不同的系统反馈的模式
也可以试验我们的信号 比如编码器啊
[听不清]这些东西
这是应用笔记
这是controlSUITE的使用
那么motorWARE打开后 基本上跟controlSUITE是一样的
motorWARE我们找不到除了电机驱动之外的东西
因此我们建议用CSS界面来打开
motorWARE
我们看看如何在CSS里面打开motorWare
导入工程
大家看到我在view里面
第一个是resource 这个选项
打开后 我们找到相应的装在我们电脑上的TI的软件
比如刚才说的controlSUITE motorWARE
MSPWARE和[听不清]
MSPWARE是支持430的软件
[听不清]是我们的操作系统
它跟之前的内容写入是一样的
只是在CSS中打开导入的过程比较简单
你要找哪个版本的[听不清]先考虑你的硬件
输入的电压范围 输入的电流范围哪个是比较合适的
目前是6.1点几
与CCS3.0相比的话
界面会更加人性化
内存的资源也会更丰富
这个是CCS 加入工具的话 你可以找属性
删减文件这些
还有一个参数我要讲的是
CSS有两个模式 一个是editor 一个是device
editor就是我在原程序编码
这个阶段 device就是程序编好
编译完成通过之后
通过仿真器下载到芯片上 进行仿真
还有一个CCS跟3.3不一样的
3.3上有一个配置文件
和软件 我们拿到就直接在这个地方
选择它的硬件工具 这里没有 我们可以在这个
它给的configuration下面找到
在连上板子之后 我们点击下
然后测试 假如测试过了的话
可以[听不清] 假如测试没过
那就排除了硬件了原因
好 我今天就讲到这里
谢谢大家
-
 未学习 C2837x入门指南(一) — 概述
未学习 C2837x入门指南(一) — 概述
-
 未学习 C2837x入门指南(二) — 芯片架构
未学习 C2837x入门指南(二) — 芯片架构
-
 未学习 C2837x入门指南(三) — 开发环境
未学习 C2837x入门指南(三) — 开发环境
-
 未学习 C2837x入门指南(四) — 外设寄存器操作
未学习 C2837x入门指南(四) — 外设寄存器操作
-
 未学习 C2837x入门指南(五) — 复位和中断
未学习 C2837x入门指南(五) — 复位和中断
-
 未学习 C2837x入门指南(六) — 系统初始化
未学习 C2837x入门指南(六) — 系统初始化
-
 未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
-
 未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
-
 未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
-
 未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
-
 未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
-
 未学习 C2837x入门指南(十二) — DMA模块(上)
未学习 C2837x入门指南(十二) — DMA模块(上)
-
 未学习 C2837x入门指南(十三) — DMA模块(下)
未学习 C2837x入门指南(十三) — DMA模块(下)
-
 未学习 C2837x入门指南(十四) — CLA模块
未学习 C2837x入门指南(十四) — CLA模块
-
 未学习 C2837x入门指南(十五)—系统设计之调试仿真
未学习 C2837x入门指南(十五)—系统设计之调试仿真
-
 未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
-
 未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
-
 未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
-
 未学习 C2837x入门指南(十九)—双内核之间的通信
未学习 C2837x入门指南(十九)—双内核之间的通信
-
 未学习 C2837x入门指南(二十)—通信系统之SPI
未学习 C2837x入门指南(二十)—通信系统之SPI
-
 未学习 C2837x入门指南(二十一)—通信系统之SCI
未学习 C2837x入门指南(二十一)—通信系统之SCI
-
 未学习 C2837x入门指南(二十二)—通信系统之McBSP
未学习 C2837x入门指南(二十二)—通信系统之McBSP
-
 未学习 C2837x入门指南(二十三)—通信系统之IIC
未学习 C2837x入门指南(二十三)—通信系统之IIC
-
 未学习 C2837x入门指南(二十四)—通信系统之USB
未学习 C2837x入门指南(二十四)—通信系统之USB
-
 未学习 C2837x入门指南(二十五)—通信系统之CAN
未学习 C2837x入门指南(二十五)—通信系统之CAN
-
 未学习 C2837x入门指南(二十六)—开发工具汇总
未学习 C2837x入门指南(二十六)—开发工具汇总
-
 未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
-
 未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)
未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)




























