
电机驱动
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
C2837x入门指南(五) — 复位和中断




大家好 本章节我们讨论的是
复位和中断
我们先了解F28x系列芯片复位以后流程是怎么样的
然后讨论F28x的中断架构
首先 F28X芯片存在五种复位源
看门狗复位 升电复位
休眠复位 XRS引脚本身电频变化引起的外部复位
以及检测到时钟丢失的复位
其中 时钟丢失复位 仅仅是芯片本身和外设
并不会在XRS复位引脚上产生电频
其他四种都会在XRS复位引脚上产生电频
另外 CPU1的看门狗复位
会复位CPU1和CPU2两个内核
但CPU2的看门狗复位 仅仅复位CPU2一个内核
reset cause register RESC寄存器只会记录最后一次复位的源是什么
芯片复位以后会进入boot引导模式
双核CPU引导的流程是
CPU1新执行自己的boot ROM
并一直控制的boot流程
而CPU2一直处于复位状态
除非CPU2配置到flash启动
从CPU1的控制下执行自己的boot ROM
并且决定如何启动
在此期间
双核之间是通过IPC核间通讯的寄存器实现信息的交互
boot ROM里面具体会做哪些事情
我们以CPU1内核为例来讲解
复位之后全级中断是关闭的
PIE也被禁止
复位相量找到boot ROM里面地址开始执行boot的代码
第一件事情就是检测
是否有仿真器连接
区分是进入仿真模式还是脱机模式
这个检测仅检测芯片上TRST广角上电频的高低
高电频表示是仿真模式
低电频是脱机模式
在仿真模式下 Boot会查看 EMU boot control计算器的wait
EMU_KEY的值是不是0x5A
不是的话 就进入等待模式
否则会继续查看 EMU Boot control计算器的wait
EMU Bmode的值是不是0xFE
是根据默认的GPIO72和84的状态决定
往哪里引导
否则查看EMU BMODE的值是不是0xFF
是就表明用户更改了默认的 GPIO boot的引脚模式和引导模式
否则继续查看BMODE的值
根据不同的组合决定 引导到内存
或者通信外设
如果它等于0x03
进入get mode
还需要查看OTP KEY值是否为0x5A
来决定引导到flash 或内存或通信外设
在脱机模式下
boot会查看两个GPIO引脚
GPIO72和GPIO84的状态
以及ZXOTP Bootcontrol计算器的wait
OTP key和OTP Bmode的值决定
引导内存或者通信外设
大致流程与仿真模型类同
因此 总的来看
复位以后 芯片进入boot ROM去执行代码
先判断是进入仿真还是脱机模式
然后根据EMU control计算器
两个GPIO管脚 GPIO72和GPIO84的状态 和ZXOTP bootcontrol计算器的值决定
来决定引导内存或通讯外设
进行运行
那如果是引导了flash
我们的应用程序最终是如何经过main函数的呢
简单来说 在应用程序中
你需要设定一个codestart
然后让这个段执行一个
C_int00的函数
这个函数是TI提供的库函数
它会执行建立编译环境
建立C语言运行环境 和进行内存清理的工作
在完成这些工作后
它就自动调用lin函数
然后就进入了应用程序的控制范围
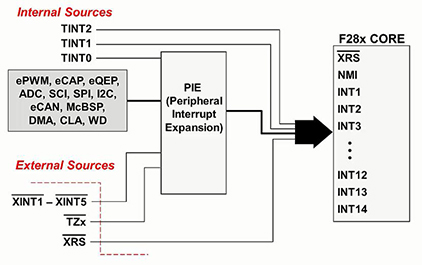
接下来 我们介绍中断
中断源本身跟之前芯片没有很大差别
只是增加了新的外设
同样都是进入PIE进行管理
然后它既有内部中断 也有外部中断
在可屏蔽中断的处理上
首先有一个全局中断开关
由INTM控制
只有当它被使能 可屏蔽中断才能被接收
并响应
其次 它将中断分成了14组
每组有一个中断使能位进行控制
同理 只有该组所在为被使能
该组包含的中断 才可能被接受并响应
同时 它还有一个标志位
无论是否使能IER 只要该组有中断发生
就会置位
这是IFR计算器的未定义
它可以被手动置位或清零
原始操作可以保证它在置位或清零的时候
不会被打断
IER计算器 是实现使能或禁能的功能
它和IFR一样 不能像外设寄存器一样
对未进行寄存器里操作
而必须使用Mask处理
置位表示使能 清零表示禁能
全局中断使能位 在ST1计算器中的定义
复位后的1表示禁能
它只能通过汇编语言进行操作
asm CLRC INTM是使能
asm SETC INTM是禁能
外设中断 总共分为12组
最多支持为扩展以后
为192个 每组16个
每组里面的每个中断 有自己的标志位和使能位
比如第一组是PIEFR1 和FIEIER1
只有当标志位置起 使能位被打开
才能让后一个IER和IFR等待响应
这个是所有中断的分配表
先是12组的低位八个
然后是12组的高位八个
可以看到 其实还有很多空位是预留的
具体到一组的PIE的计算器
从PIEFR到PIEIER PIEACK
到PIE control
中断信号理由大致是外设先产生中断
对应的INT X.Y会置位PIEFR
此时 如果PITIER对应的位被使能
内核的FR就会置位
如果此时IER对应位被使能
就会进入检查全局中断位INTM是否使能
如果使能 PIE就会根据
NTX.Y查找对应的中断相量表
然后响应相应的中断函数
对于双核F2837XD芯片来说
由于多了一个CPU 因此它多了一个PIE
所有这些外设中断 都可以进入任何一个PIE
当然 由于加入核间通信 它的中断可以被两个内核响应
最后是中断响应的硬件时序
首先 硬件上会自动保存14个CPU寄存器
不需要用户干预
然后 中断延迟
根据内外中断不同
会有两个cycle的差别
最小延迟对于外部中断来说
是16个cycles 对内部中断是14个cycles
最大延迟取决于等待状态和全机中断的状态
本章 我们主要讲解了复位和中断
了解了引导模式的工作流程和PIE是如何工作的
接下来我们继续介绍芯片的系统配置和初始化
之后就可以开始了解和使用各种控制外设和通信外设
开始设计自己的终端产品了
-
 未学习 C2837x入门指南(一) — 概述
未学习 C2837x入门指南(一) — 概述
-
 未学习 C2837x入门指南(二) — 芯片架构
未学习 C2837x入门指南(二) — 芯片架构
-
 未学习 C2837x入门指南(三) — 开发环境
未学习 C2837x入门指南(三) — 开发环境
-
 未学习 C2837x入门指南(四) — 外设寄存器操作
未学习 C2837x入门指南(四) — 外设寄存器操作
-
 未学习 C2837x入门指南(五) — 复位和中断
未学习 C2837x入门指南(五) — 复位和中断
-
 未学习 C2837x入门指南(六) — 系统初始化
未学习 C2837x入门指南(六) — 系统初始化
-
 未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
-
 未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
-
 未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
-
 未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
-
 未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
-
 未学习 C2837x入门指南(十二) — DMA模块(上)
未学习 C2837x入门指南(十二) — DMA模块(上)
-
 未学习 C2837x入门指南(十三) — DMA模块(下)
未学习 C2837x入门指南(十三) — DMA模块(下)
-
 未学习 C2837x入门指南(十四) — CLA模块
未学习 C2837x入门指南(十四) — CLA模块
-
 未学习 C2837x入门指南(十五)—系统设计之调试仿真
未学习 C2837x入门指南(十五)—系统设计之调试仿真
-
 未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
-
 未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
-
 未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
-
 未学习 C2837x入门指南(十九)—双内核之间的通信
未学习 C2837x入门指南(十九)—双内核之间的通信
-
 未学习 C2837x入门指南(二十)—通信系统之SPI
未学习 C2837x入门指南(二十)—通信系统之SPI
-
 未学习 C2837x入门指南(二十一)—通信系统之SCI
未学习 C2837x入门指南(二十一)—通信系统之SCI
-
 未学习 C2837x入门指南(二十二)—通信系统之McBSP
未学习 C2837x入门指南(二十二)—通信系统之McBSP
-
 未学习 C2837x入门指南(二十三)—通信系统之IIC
未学习 C2837x入门指南(二十三)—通信系统之IIC
-
 未学习 C2837x入门指南(二十四)—通信系统之USB
未学习 C2837x入门指南(二十四)—通信系统之USB
-
 未学习 C2837x入门指南(二十五)—通信系统之CAN
未学习 C2837x入门指南(二十五)—通信系统之CAN
-
 未学习 C2837x入门指南(二十六)—开发工具汇总
未学习 C2837x入门指南(二十六)—开发工具汇总
-
 未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
-
 未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)
未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)




























