
电机驱动
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
C2837x入门指南(二十三)—通信系统之IIC




我们来看看I2C模块 I2C是一个非常通用的总线
我们2837X的I2C 支持的是飞利浦的2.1的模式
支持的数据传输速率是从10kbps到400kbps
那我们要注意 我们不支持高速的模式
那么I2C总线的话
其实它和之前的SPI USB等等不同
它是有一个特定的主机的
I2C总线上的每个器件都有可能作为主机
或者是从机 在某个时刻
主要是具体是哪个器件作为主机的话
是根据总线的某个器件
发起的数据传输以及生成了时钟 同时占据了数据总线
这个器件就作为数据总机
那被它所寻址的那个器件 就作为从机
也比如说 这个器件发起了数据
它产生了时钟信号 它是主机
它寻址 需要沟通的是这个器件的话
这个被沟通的器件 被通讯的器件
就作为从机
而且I2C是支持多主机的模式的
I2C的数据发生主要是两种模式
第一是标准模式 就是说我的是比较精准的发送
标准的器件 这数据的格式 写的字节
是更精确的
还有一个是repeat模式 也就是我不断发送
软件产生一个停止信号 或者新的启动条件成立的时候
启动的时候 才会停下来
这个是一种repeat的模式
重复的模式
那下面这图是I2C总线的一个框图
我们可以看到 在总线上必须通过两个上拉电阻
拉到VDD
最主要的作用是需要让总线在没有数据发送时
让总线保持高电平的状态
每个器件只需要SDA和SCL两根线就可以挂到总线上
SDA主要是作为数据中心 数据交换
SCL主要是作为产生磁通用
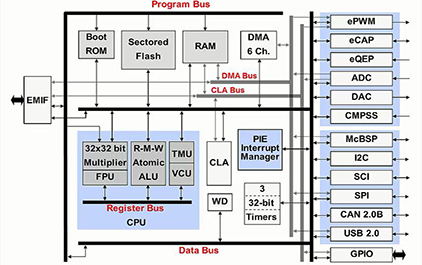
我们看看I2C模块的系统框图
它这个系统框图 非常方便 对外只需要两根线
一个是SDA数据线 一个是SCL时钟线
SDA作为数据线 数据接收和发送主要是靠
12C的移位 发送移位寄存器和接收移位寄存器 和自己的数据结构结合
以及相对应的16位的FIFO
来构成
那么I2C总线上的某个器件 每个器件工作模式的主要有四种
一个是从机接收模式
一个是从机的发送模式
一个是主机的接收模式 一个是主机的发送模式
那么每个器件只能处在四个工作模式中的一种
我们先来看看 数据发送从最开始
主机 然后到从机的状态是如何切换的
首先作为一个主机的话 首先是触动主机的发送状态
首先发送出去 并产生时钟
来控制总线 首先是发出了这个数据
包括通讯的设备的从机地址 它是要读数据还是写数据等等这些
是作为主机的发送模式
这个时刻 从机所有的器件首先 都会接收到这个广播信号一样的
然后分别进行地址识别
假如 某个器件识别到了它的地址和自己的地址
是相互吻合的 那么这个器件就变成从机的发送模式
接收模式
它会根据主机发送的指令
是否需要发送数据 假如需要发送数据给主机的话
它会进入到从机的发送模式
将指定的地址和数据发送给主机
那么这时候主机就会 从主机的发送模式切换为主机的接收模式
来接收从机发送过来的数据
在四种状态之间 是可以切换的
器件从主机的发送模式会进入到主机的接收模式
从机的接收模式变成从机的发送模式
这个方向是单向的
我们看看I2C的数据格式
I2C数据主要是包括有7种模式
3种模式
一个是7位的地址模式
10位的地址模式 一个是自由的模式
7位的地址模式 是启动时将7位的从机地址发送出去
然后pin给出读写指令
然后所需要操作的数据和一些应答位
在这个里面的 一个R/W的读写控制位的话
假如说这个位等于0的时候 主机将数据写入到从机的地址中
假如说这个地方是1的话 主机会把这个数据
从从机这个指定的地址读取回来 那10位的地址格式
跟7位是一样的
不过我的地址是10位的
首先地址是发高位
高的两位先发出去
其他地方有11110来填充
然后紧接着是低位的地址 8位的信号
然后是数据
自由的话 就没有地址在线
每个数据之间都会加入ACK应答信号
这个地方的S和P指的是
从启动到停机
启动主要用的是 SAR在有效传导时候
SDA从无效变成低电平 从高电平变成低电平
启动信号 同样是停止的话
是从低电平到高电平
这时候会停止信号
那么我们再来看 I2C的仲裁
I2C的仲裁主要是用于什么地方
如果总线有多个组发送器 同时开始发送数据
总线上的数据肯定会产生冲突
这个时候需要I2C的仲裁机制介入
仲裁遵循的一个原则是 程序中的竞争
发送器发送使SDA提供的数据能够
SDA被拉低
的那个占据优先权 占据数据优先权
这个比较拗口 我们解释就是说
这个是一个时钟信号
假设有2个 device1和device2都发送数据的话
第1个点全部是高电平
在SDA上保持高电平
然后第二个它们都变成低电平
第三个的时候 第三个clock上升点的时候
device1会拉高 device2继续保持0
这个时候就device2占据了总线
因为它需要的能耗比较小
低电平 device1的话
就失去了对总线的一个控制权
总线控制丢失的话 在芯片内部
会产生总线丢失的一个错误中断
客户可以在这个中断里面进行相应的处理
这个是I2C的仲裁
其实I2C通讯总线 我们做一个总结归纳
它主要是支持飞利浦I2C 2.1的版本
地址寻位是7位和10位的
发送数据时候是从10kbps到40kbps
等等
然后它也支持接收和发送FIFO
同时这里的接收和发送FIFO能产生
接收和发送的中断
-
 未学习 C2837x入门指南(一) — 概述
未学习 C2837x入门指南(一) — 概述
-
 未学习 C2837x入门指南(二) — 芯片架构
未学习 C2837x入门指南(二) — 芯片架构
-
 未学习 C2837x入门指南(三) — 开发环境
未学习 C2837x入门指南(三) — 开发环境
-
 未学习 C2837x入门指南(四) — 外设寄存器操作
未学习 C2837x入门指南(四) — 外设寄存器操作
-
 未学习 C2837x入门指南(五) — 复位和中断
未学习 C2837x入门指南(五) — 复位和中断
-
 未学习 C2837x入门指南(六) — 系统初始化
未学习 C2837x入门指南(六) — 系统初始化
-
 未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
-
 未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
-
 未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
-
 未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
-
 未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
-
 未学习 C2837x入门指南(十二) — DMA模块(上)
未学习 C2837x入门指南(十二) — DMA模块(上)
-
 未学习 C2837x入门指南(十三) — DMA模块(下)
未学习 C2837x入门指南(十三) — DMA模块(下)
-
 未学习 C2837x入门指南(十四) — CLA模块
未学习 C2837x入门指南(十四) — CLA模块
-
 未学习 C2837x入门指南(十五)—系统设计之调试仿真
未学习 C2837x入门指南(十五)—系统设计之调试仿真
-
 未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
-
 未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
-
 未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
-
 未学习 C2837x入门指南(十九)—双内核之间的通信
未学习 C2837x入门指南(十九)—双内核之间的通信
-
 未学习 C2837x入门指南(二十)—通信系统之SPI
未学习 C2837x入门指南(二十)—通信系统之SPI
-
 未学习 C2837x入门指南(二十一)—通信系统之SCI
未学习 C2837x入门指南(二十一)—通信系统之SCI
-
 未学习 C2837x入门指南(二十二)—通信系统之McBSP
未学习 C2837x入门指南(二十二)—通信系统之McBSP
-
 未学习 C2837x入门指南(二十三)—通信系统之IIC
未学习 C2837x入门指南(二十三)—通信系统之IIC
-
 未学习 C2837x入门指南(二十四)—通信系统之USB
未学习 C2837x入门指南(二十四)—通信系统之USB
-
 未学习 C2837x入门指南(二十五)—通信系统之CAN
未学习 C2837x入门指南(二十五)—通信系统之CAN
-
 未学习 C2837x入门指南(二十六)—开发工具汇总
未学习 C2837x入门指南(二十六)—开发工具汇总
-
 未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
-
 未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)
未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)




























