什么时候可以同步整流提高效率?
Loading the player...
将在30s后自动为您播放下一课程
大家好! 欢迎观看本次演示。 我叫 Bing Lu。 今天我要介绍的是 同步整流什么时候可以 提高效率? 本次演示是由我和 Bernard Keogh 准备的。 这次培训将介绍 什么内容? 本次演示的 目的是 尝试解释 SR 的工作原理, 说明它们何时有效, 展示针对它们的 各种控制方法, 指出一些需要注意的缺点, 并提供一些设计 示例。 本次演示中 将会提及的 器件型号包括 UCC24612、UCC24610、 UCC24630 和 UCC24624。 相关参考设计 包括台式机电源、 工业电源、 电视机电源 以及 USB PD 适配器。 因此,本主题将 与不同的应用相关, 尤其会介绍 需要高效率 和更出色的 热管理性能的 隔离式电源。 首先,我们将讨论 同步整流。 如何工作? 通常,我们使用二极管 作为整流方法。 它很简单。 它会自动 开启和关闭。 但是,我们可以用 MOSFET 代替二极管, 使体二极管的方向 与二极管整流器 相同。 因此,如果我们使用 N 沟道增强型 MOSFET 作为开关器件, 当我们关闭栅极时, 将看到通道关闭。 这样,电流仍然会 流经体二极管, 就像存在 二极管整流器一样。 但是,当开启 MOSFET 时, MOSFET 会成为 带有双向 连接通道的 传导通路, 因此可以把来自 体二极管的电流引导至 通道中。 如果我们可以 控制 MOSFET 栅极, 将栅极导通为高电平, 就能使电流流经体二极管。 所以,当电流应该 流经体二极管时, 我们可以开启 SR 栅极。 而通道中的电流 应该衰减到零时, 我们可以关闭 SR 栅极。 因此,MOSFET 与 二极管同步工作, 从而实现所谓的 同步整流。 为什么我们要使用 同步整流? 简单来说就是为了获得 更好的效率和高功率 密度。 需要高效率 有几个原因。 其中之一是 达到效率标准。 DoE 和 CoC 都要求 外部适配器 具有高效率, 因此 必须满足 效率标准 才能销售产品。 其他标准, 比如 80 Plus, 也定义了 台式机电源的 效率要求。 需要高效率的 另一个原因 是提高功率密度。 例如,一些旅行适配器 就有这种需求。 通常希望适配器 尽可能小, 这样会 更方便携带。 而对于其他用途, 例如 DIN 轨电源, 通常希望它们 具有更小的尺寸, 这样在同一机架中 可以安装更多的电源 并提供更高的 功率处理能力。 另一个原因是 为了解决热问题 并提高可靠性。 由于 SR 能够 降低传导损耗, 提高效率, 并降低总体内部功率 损耗, 因此我们可以降低 运行成本, 还可以减少 需要消散的热量, 进而能够降低 热管理成本, 消除二极管 整流器热点, 提高稳定性、可靠性 和使用寿命。 现在,让我们看看 二极管整流器损耗。 二极管整流器中 有多少损耗? 这里有一个简单的例子, 反激式转换器。 在反激式转换器中 可以看到 输出电流全部 流经输出 整流器二极管。 出现这种情况的 原因是输出电容器 不接受直流电流。 所以,所有的直流电流 都流经二极管。 不仅仅只有反激式拓扑 存在这种情况, 分析整流器二极管时 会发现许多 其他拓扑也会 出现这种情况。 如果要计算 二极管的损耗, 可以简单地将 二极管正向压降 建模为固定值, 即 V f,然后乘以 输出电压。 因此,功率与 输出电流 以及正向压降成正比。 也就是说, 较低的正向压降 在二极管上会产生 较少的传导损耗。 如果假设电路的 其余部分 具有 100% 的效率, 那么可以轻松 计算出二极管整流器效率, 即输出电压 除以输出电压 加正向压降, 然后将其绘制在 此曲线中, 此处假设 正向压降 为 0.5 伏。 在这条曲线中 可以清楚地看到, 输出电压 较低时效率会 变差。 出现这种情况的 原因是正向压降 成为了输出电压的 较大部分。 所以,当输出电压较低时, 整流器很有意义。 而当输出电压较低时, 整流器的作用 就越来越小。 假设现在有 1000 伏的输出电压, 使用同步整流器 是否有意义呢? 也许没有。 使用同步整流器 可以减少多少 损耗呢? 这里是肖特基二极管 和同步整流器 之间的直接比较 情况。 肖特基二极管,就是这一个 25 安培 60 伏特的肖特基二极管。 在 10 安培时, 该器件的正向压降 为 0.37 伏特。 我们可以把正向压降 作为正向电流的函数 绘制在这条红色曲线中, 这里的温度 是 125 摄氏度。 同时,我们找到 一个同步整流器, 这个器件具有相同的 额定电压 60 伏特。 另外,这个器件 在 125 摄氏度时的 RDS(ON) 为 15.3 毫欧。 我们同样可以 绘制另一条曲线, 表示同步整流器 在不同正向电流下的正向压降。 在这条曲线上可以 看到 10 安培时的相同数据。 这一条的 正向压降 大约为 320 毫伏。 但这一条只有 大约 150 毫伏。 因此可以 大幅减少正向压降, 这意味着 整流器损耗更小, 热应力更小。 具体有多少损耗, 我们可以 通过对传导损耗 进行建模以及 对电流进行建模来计算损耗, 此处以反激式转换器为例。 对于这个特定的 肖特基二极管, 我们可以使用 固定电阻和固定压降 来逐步和线性地 对其正向压降进行建模。 同时,我们可以通过 RDS(ON) 对同步整流器的 正向压降进行建模。 与此同时,使用反激式 转换器次级侧电流, 在此处的显示结果 很像平均电流等于 输出电流的三角波形, 假设占空比为 50%, 那么可以计算出 均方根电流为这个数字, 而平均值为 这个数字。 因此,我们可以把损耗模型 应用于这个电流波形。 我们可以计算 二极管损耗和 SR 损耗。 从这条曲线可以 清楚地看到, 从二极管更改为 SR 可以节省 50% 以上的 传导损耗。同样的计算方法 也可以运用于 其他拓扑,比如 LLC。 然而,LLC 转换器 比反激式转换器 稍显复杂,因为电流 现在是三角形。 这里还有一个 例子,我展示的是 UCC24624,这是一个 SR 控制器,用于驱动 LLC 转换器的两个 SR。 在这个例子中, 我们可以把次级侧电流近似为 经过整流的正弦电流。 这里的平均电流 等于输出电流。 每个 SR 以正弦方式 承载一半的电流。 因此,我们将看到 流过 S1 的平均电流 和流过 S2 的 平均电流 等于输出电流的 一半。 此外可以基于 正弦形状来计算 它们的均方根电流。 虽然 LLC 电流不是 严格的正弦电流, 但正弦形状可以给我们 提供非常好的均方根电流 近似计算方法。 获得均方根电流 和平均电流后, 就可以回到 损耗模型, 并计算 SR 的 传导损耗。 在我们了解 SR 的 工作原理之后, 现在我们应该提出的 一个重要问题是, 我们要如何控制 这个 SR? 首先,有一些拓扑 非常简单。 它们无需任何 专用控制器 IC 就可以 实现 SR 控制。 这里有一个例子。 这个 PMP8740 会使用 UCC28950 这种相移全桥 控制器 来同时控制 初级侧控制器开关 和次级侧 SR。 SR 的控制信号 来自初级侧 控制器。 其他一些拓扑, 比如同步降压拓扑 或有源钳位正激式拓扑, 可以采用相同的控制方法。 例如,在同步降压 拓扑中, 对同步 整流器的 控制与控制开关 是互补的。 所以只需 设计和估算 这段时间来防止 两个开关之间发生 击穿。 我们可以控制 同步整流器。 在有源钳位 正激式转换器上, 甚至可以使用 自驱动方法, 即变压器 两端的电压 可用于直接驱动 同步整流器 并实现控制。 不过,还有 其他一些拓扑, 比如反激式、有源钳位 反激式或 LLC 等拓扑, 由于上述复杂性, 确实需要专用的 SR 控制器。 有一种 SR 控制方法 基于 V DS 检测。 我们在 UCC24610 中实现了这一点。 这种控制方法 基于对 SR 漏源极 之间电压降的 观察。 下面我们举例说明。 在体二极管导通之前, SR 电压处于高位。 当电流开始 流经体二极管时, SR 两端的电压降就是 这个体二极管的压降。 如果我们能设置 一个阈值 V TH_ON, 一旦 V TH_ON 两端 存在电压,我们便知道 电流正在流经体二极管, 我们就可以开启 SR 了。 一旦 SR 开启, 这个通道就会 变成一个电阻器, 这样就能 用来检测 流经 SR 的电流。 当电压降 非常接近于 0 时, 我们知道电流 也接近于 0, 我们可以设置 另一个阈值 V TH_OFF 来关闭 SR。 因此,可以 实现两个比较器 来控制 SR 的 开启和关闭。 这种控制方法 对拓扑没有限制。 但是,必须设计 这些比较器, 使它们能检测 非常高的电压, 而且还能检测 非常接近 0 的电压, 因为我们希望 这里的电流达到 0 并随后关闭 SR。当电压 非常接近 0 以后, 就必须处理 噪声、比较器 精度,等等。 我们无需设计 非常精确的 比较器以及使用 过去实现的其他方法, 而是采用伏秒平衡技术, 比如 UCC24630。 这款控制器利用了 DCM 反激式拓扑中的 伏秒平衡特性。 在 DCM 反激式拓扑中的 每个开关周期内 都会实现伏秒平衡, 如此图中所示, 在每个开关周期中, 变压器的 励磁电流从 0 变为最大值, 然后在每个开关周期中 再从最大值复位为 0。 这告诉我们, 当电流 达到 0 时, 正伏秒等于 负伏秒。 因此我们可以使用 这一特性来控制 SR 的关闭。 因为这个电路基本上 就是一个积分器, 所以对噪声的敏感度 要低得多。 但是,只有在 DCM 运行期间 才能实现伏秒平衡, 使用 CCM 时, 虽然在稳态 运行期间 是平衡的, 但在过渡期间 不能实现伏秒平衡。 所以这种方法 不能直接实现。 必须依赖 其他技术 才能在 CCM 条件下运行。 此外,这种方法 也不适合 LLC 和 有源钳位反激式拓扑 等拓扑结构,虽然电路 仍然实现了伏秒平衡, 但电流 过零点 不是伏秒 平衡点, 因此将无法 控制 SR。 VDS 检测方法更大程度上 是一种通用的控制方法, 因此我们将花更多的时间 介绍这种控制方法。 在我们弄清楚 控制方法之后, 接下来需要回答的 一个问题是,应该选择 哪一种 SR? SR 的额定电压 很简单。 这是由拓扑决定的。 所以,我们在 选择 SR 额定电压时 实际上并没有太多自由度。 但是可以 自由选择 FET 的大小以及 需要多低的 RDS(ON)。 通过前面的分析 可以知道,使用 SR 的 全部目的就是 试图减少传导损耗。 所以我们应该选择 尽可能低的 RDS(ON)。 但是,如果看一下 VDS 检测的控制方法, 我们就知道 当这个电流达到 V TH_OFF 时 表示正在关闭 SR。 关断电流实际上 等于 V TH_OFF 除以 RDS(ON)。 RDS(ON) 较低时 比 RDS(ON) 较高时 关闭 SR 的时间要早得多。 一旦 SR 关闭, 其余电流 都将流过 体二极管。 因此,即使选择 较低的 RDS(ON) 之后, 当 FET 导通时, 传导损耗 会低得多, 但由于 SR 的关闭时间 会早得多, 最终可能会产生 更高的传导损耗。 所以,必须注意 关断阈值的 负面影响。 所以,选择的 RDS(ON) 不能太小, 否则,可能得不到 想要的结果。 除了传导损耗, 我们还 必须注意 开关损耗。 整体 SR 损耗包括 传导损耗、开关损耗 和驱动器损耗。 传导损耗 取决于 RDS(ON),但前提是 能够完美控制 SR。 但是,开关损耗 和驱动器损耗 都与寄生电容 成正比。 我们都知道更低的 RDS(ON) 意味着更高的电容。 较低的传导损耗 通常会带来 较高的开关损耗。 这里显示了两条曲线,根据设计, 一条使用较低的 RDS(ON), 另一条使用较高的 RDS(ON), 我们可以看到在不同负载下 能够实现的效率。 所以可以看到, 如果使用更低的 RDS(ON), 可能可以在更重的 负载下实现更高的 效率。 但是,由于更高的 开关损耗, 在更轻的负载下 将出现更低的效率。 另一方面,如果 选择更高的 RDS(ON), 重负载的效率可能会更低, 但在更轻的负载下, 效率可能会更高。 因此,为 SR 选择合适的 RDS(ON) 实际上是一种 权衡利弊的过程。 还有一点必须注意, 根据效率标准的要求, 必须以四点平均值的方式 进行效率计算。 因此,轻载效率 与重载效率 同样重要。 而且,一些 效率标准 还需要 10% 的效率 才能达到一定的水平。 SR 面临的 挑战之一 是如何处理 连续传导负载。 在不同的拓扑中,比如 在反激式、正激式和 LLC 拓扑中, 经常会在 CCM 条件下运行, 在这种情况下, 电流将进入连续传导。 对于 LLC, 当开关频率 高于谐振频率的 时候,我们将 在初级侧开关 关闭后看到非常高的 di/dt 点位。 所以,这种情况下 我们也可以看到 这类似于 CCM 运行模式。 在所有这些 运行情况下 都将看到控制器必须 处理这个高 di/dt。 因此 SR 控制器必须 能够极其快速地响应。 让我们来看看这个 di/dt 的 更多细节。 对于反激式转换器, 在开始时的 次级侧 导通期间, 可以看到 di/dt 由 输出电压和 磁化电感决定。 一旦初级侧 接通,初级侧 和次级侧都将 导通,而电流 开始减小。 这个电流减小斜率 di/dt 实际上 由输入电压和 输出电压所共同决定, 而这些电压 是在漏电感上提供的。 由于电压高得多 且电感低得多, 因此这个 di/dt 将远高于这里的 di/dt。 此外,SR 控制器 应该能够 正好在过零点处 关闭 SR。 如果 SR 控制器的 响应速度不够快, 那么可能会延迟关闭。 这种情况将 产生负电流, 进而造成实际损耗。 而且有可能会 引入电压应力。 所以,比较器需要 非常快速地响应 以便最大限度减小 负电流。 这些情况提醒了我们 二极管反向恢复问题。 所以在这里,我将展示一种 典型的二极管反向恢复情况。 这是二极管的压降。 我们可以看到, 在二极管电流过零后, 它也不会关闭,一直到 TR 的 TA 时间到期为止。 这意味着,这相当于 SR 关闭延迟。 从这个表中 可以看出 反向恢复 越糟糕, 在进入 CCM 条件后产生的 开关损耗就越大。 这就说明了 在 CCM 条件下 运行时具备能够 响应高 di/dt 的 SR 控制器 有多么重要。 一旦了解这一情况后, 可能就会产生疑问, 为什么我不早点 关闭 SR, 这样我就不会延迟关闭了? 我们必须考虑两种情况。 如果过早 关闭 SR, 那么将会发生的情况就是, 电流最初是 流经 SR 通道的, 当源极关闭 SR 时, 电流将会 开始流向 体二极管。 因此,即使不处理 SR 关闭问题, 也要处理体二极管 反向恢复 问题。 另一方面,如果 太迟关闭 SR, 那么完全 不必处理 体二极管,但是 要处理 SR 关闭延迟问题。 因此,作为底线, 我们希望 击穿时间或 SR 关闭延迟时间 应该短于 体二极管 反向恢复时间, 对于 TA 部分, 我们希望短于 这个时间,这样就 不会比体二极管的行为更差。 另一件事情就是, 必须注意 二极管模式期间的 CCM 运行情况, 例如, 在启动期间 或过载条件下, 控制器可能 完全掉电。 在这种情况下,SR 必须 安然度过它的体二极管 反向恢复时间。 此外,如果能够访问 主开关的开启信号, 这也可能对时间控制 有所帮助, 因为这样可以 在正确的时间关闭 SR。 例如,使用 同步整流器降压转换器。 在同步降压转换器中, 可以在正确的时间 关闭 SR,从而最大限度 减小反向恢复时间。 SR 的其他 挑战包括 应对寄生振铃 或噪声。 对于反激式转换器, 如果在 DCM 模式下运行, 通常会观察到两次振铃。 第一次振铃 是 SR 开启后的 泄漏复位振铃。 在 SR 开启后, 泄漏复位, 此时将出现 大量噪声。 如果对这种情况 不采取应对措施, SR 可能会 立即关闭。 在 DCM 部分, 开关节点电容器 将与磁化电感器 一起共振。 这样将会产生 大型振铃, 并且这可能会低于地电平。 这样会开启体二极管, 并且 SR 有可能会 在错误的时间开启。 所以,还需要一些方法 处理 DCM 振铃问题。 我们经常使用 消隐时间 来避免强制关闭 或强制开启。 一旦在 LLC 转换器中运行, 消隐时间有时 会变得很方便。 我们在前面讨论过, LLC 转换器的电流形状 是正弦曲线。 如果观察电流形状, 可以发现, 导通开始时和结束时的 电流都非常小。 因此 SR 控制器 实际上无法分辨 这一点的小电流或 这一点的小电流。 所以可以开启 SR 并立即关闭。 为了避免 导通时间过短, 我们通常设置一个 最短导通时间, 使 SR 电流 稍微增大一点, 这样可以长时间 保持导通。 因此可以 在正确的时间关闭 SR。 最短导通时间 在 LLC 条件下也有帮助。 当我们使用 V DS 检测 来控制 SR 时, 需要注意的另一件事 是寄生电感器的影响。 当我们 检测到 V DS 时, 实际上检测到的 电压是该通道上的 SR 电压与 寄生电感电压的 组合。 虽然可以 通过优化布局 来最大限度减少 寄生电感,但封装电感 始终存在。 因此,检测到的 整体电压 是 RDS(ON) 电压 和 L di/dt 电压。 以 LLC 电流 为例, 可以看到, 在上升沿期间, 当电流增加时, 因为 di/dt 为正, 控制器看到的电流 比预期的要多。 另一方面, 在负斜率期间, 电流下降时, di/dt 为负, 因此,控制器 看到的电流 小于实际电流。 因此,控制器可能会 过早关闭 SR。 然后在 SR 关闭后, 其余电流 流过体二极管 并产生较大的传导损耗。 为了避免这种情况, 首先要做的 就是选择具有 低封装电感的器件, 以便最大限度 缩短这个时间, 使这些关断点 尽可能靠近末端。 我们在控制器 UCC24612 和 UCC24624 中 实现的另一种技术, 就是使用所谓的 比例栅极驱动器。 比例栅极驱动器的 理念在于, 尽可能降低 栅极电压。 我们不需要 完全开启 SR, 而是将其设置为 低压固定正向压降。 在这段时间内, 即使增加传导损耗, 但由于电流很小, 因此传导损耗的 增加量处于 最低限度。 但是,这种做法可以带来 额外的好处。 首先,我们 将它关闭后, 电压电平将接近 MOSFET 阈值电压。 因此,如果 进入 CCM 运行模式, 延迟将会缩短。 而且,因为我们会 产生更高的压降, 所以即使仍然远低于 二极管的整个压降, 但是,它对 寄生电感器将不会 那么敏感。 所以可以大幅减小 关闭位置与 零交叉点之间的距离。 这里有几个例子。 这个 PMP 设计和 28780EVM 两个都使用 24612 在 LLC 和有源钳位 反激式转换器上 实现高效率。 我们可以把 同步整流器 放置在不同位置。 观察这里的 这个波形可以看到, 我用二极管 简化了整流器。 因此可以看到, 我可以在正通路上放一个二极管, 或者我也可以在负通路上 放一个二极管。 它们都可以 整流输出电压。 将二极管放在 不同位置 有不同的结果。 如果我们 将 SR 放在高侧, 当然它更难驱动, 因为源极在这里, 输出接地在这里, 所以,更难 驱动 SR。 可能需要进行电平转换, 或者需要高侧偏置。 但是可以带来更好 或更低的 EMI。 我们之前讲过这里, 如果观察所有的红色箭头, 可以看到这些是 共模电流。 两个开关节点: 这里和这里。 这里的开关节点 是初级侧开关节点, 开关节点波形 看起来是这样的。 如果我们看一下 这里的上升沿, 一旦开关节点升起, 当关闭开关时, 开关节点将上升。 同时,次级侧 开关节点 也将上升, 试图开启整流器。 在此期间, 因为这个上升沿 会迫使电流 从初级侧通过 C2 流向次级侧, 而这个上升沿 会迫使电流 通过 C1 从次级侧 流向初级侧, 所以,这两个电流 实际上可以相互抵消 并有助于改善 EMI。 另一方面, 可以将整流器 放在底部。 低侧 SR 可以 带来一些好处, 即以输出接地为基准, 便于驱动。 而且可以 轻松偏置 IC。 但是,如果查看 开关节点和 共模噪声, 当初级侧关闭时, 开关节点上升, 次级侧开关节点 实际上会下降 以便让整流器导通。 然后会有更多电流 流过 C2, 而没有电流 流过 C1。 所以抵消 效应没有了。 最终将产生 更多的 EMI 噪声。 在实现同步 整流器之后, 必须注意偏置、 驱动和 EMI 噪声。 总结一下,SR MOSFET 相对于二极管 提供更低的 导通压降和传导损耗。 SR 可能并非总是合理的选择。 具体要取决于 输出电压和输出电流 以及功率级别。 注意低 RDS(ON) 和 高 C OSS 之间的权衡。 注意 RDS(ON) 变得过低 对于 V DS 检测控制 所带来的影响。 注意过早关闭和 体二极管反向恢复。 实际上,这可能 比短 CCM 击穿更糟糕。 另外,请注意 低侧整流的 EMI 影响。 这里有一些 阅读材料 有助于进一步 理解本次演示的 内容。 本次演示就到这里。 感谢您的关注。 570
大家好! 欢迎观看本次演示。 我叫 Bing Lu。 今天我要介绍的是 同步整流什么时候可以 提高效率? 本次演示是由我和 Bernard Keogh 准备的。 这次培训将介绍 什么内容? 本次演示的 目的是 尝试解释 SR 的工作原理, 说明它们何时有效, 展示针对它们的 各种控制方法, 指出一些需要注意的缺点, 并提供一些设计 示例。 本次演示中 将会提及的 器件型号包括 UCC24612、UCC24610、 UCC24630 和 UCC24624。 相关参考设计 包括台式机电源、 工业电源、 电视机电源 以及 USB PD 适配器。 因此,本主题将 与不同的应用相关, 尤其会介绍 需要高效率 和更出色的 热管理性能的 隔离式电源。 首先,我们将讨论 同步整流。 如何工作? 通常,我们使用二极管 作为整流方法。 它很简单。 它会自动 开启和关闭。 但是,我们可以用 MOSFET 代替二极管, 使体二极管的方向 与二极管整流器 相同。 因此,如果我们使用 N 沟道增强型 MOSFET 作为开关器件, 当我们关闭栅极时, 将看到通道关闭。 这样,电流仍然会 流经体二极管, 就像存在 二极管整流器一样。 但是,当开启 MOSFET 时, MOSFET 会成为 带有双向 连接通道的 传导通路, 因此可以把来自 体二极管的电流引导至 通道中。 如果我们可以 控制 MOSFET 栅极, 将栅极导通为高电平, 就能使电流流经体二极管。 所以,当电流应该 流经体二极管时, 我们可以开启 SR 栅极。 而通道中的电流 应该衰减到零时, 我们可以关闭 SR 栅极。 因此,MOSFET 与 二极管同步工作, 从而实现所谓的 同步整流。 为什么我们要使用 同步整流? 简单来说就是为了获得 更好的效率和高功率 密度。 需要高效率 有几个原因。 其中之一是 达到效率标准。 DoE 和 CoC 都要求 外部适配器 具有高效率, 因此 必须满足 效率标准 才能销售产品。 其他标准, 比如 80 Plus, 也定义了 台式机电源的 效率要求。 需要高效率的 另一个原因 是提高功率密度。 例如,一些旅行适配器 就有这种需求。 通常希望适配器 尽可能小, 这样会 更方便携带。 而对于其他用途, 例如 DIN 轨电源, 通常希望它们 具有更小的尺寸, 这样在同一机架中 可以安装更多的电源 并提供更高的 功率处理能力。 另一个原因是 为了解决热问题 并提高可靠性。 由于 SR 能够 降低传导损耗, 提高效率, 并降低总体内部功率 损耗, 因此我们可以降低 运行成本, 还可以减少 需要消散的热量, 进而能够降低 热管理成本, 消除二极管 整流器热点, 提高稳定性、可靠性 和使用寿命。 现在,让我们看看 二极管整流器损耗。 二极管整流器中 有多少损耗? 这里有一个简单的例子, 反激式转换器。 在反激式转换器中 可以看到 输出电流全部 流经输出 整流器二极管。 出现这种情况的 原因是输出电容器 不接受直流电流。 所以,所有的直流电流 都流经二极管。 不仅仅只有反激式拓扑 存在这种情况, 分析整流器二极管时 会发现许多 其他拓扑也会 出现这种情况。 如果要计算 二极管的损耗, 可以简单地将 二极管正向压降 建模为固定值, 即 V f,然后乘以 输出电压。 因此,功率与 输出电流 以及正向压降成正比。 也就是说, 较低的正向压降 在二极管上会产生 较少的传导损耗。 如果假设电路的 其余部分 具有 100% 的效率, 那么可以轻松 计算出二极管整流器效率, 即输出电压 除以输出电压 加正向压降, 然后将其绘制在 此曲线中, 此处假设 正向压降 为 0.5 伏。 在这条曲线中 可以清楚地看到, 输出电压 较低时效率会 变差。 出现这种情况的 原因是正向压降 成为了输出电压的 较大部分。 所以,当输出电压较低时, 整流器很有意义。 而当输出电压较低时, 整流器的作用 就越来越小。 假设现在有 1000 伏的输出电压, 使用同步整流器 是否有意义呢? 也许没有。 使用同步整流器 可以减少多少 损耗呢? 这里是肖特基二极管 和同步整流器 之间的直接比较 情况。 肖特基二极管,就是这一个 25 安培 60 伏特的肖特基二极管。 在 10 安培时, 该器件的正向压降 为 0.37 伏特。 我们可以把正向压降 作为正向电流的函数 绘制在这条红色曲线中, 这里的温度 是 125 摄氏度。 同时,我们找到 一个同步整流器, 这个器件具有相同的 额定电压 60 伏特。 另外,这个器件 在 125 摄氏度时的 RDS(ON) 为 15.3 毫欧。 我们同样可以 绘制另一条曲线, 表示同步整流器 在不同正向电流下的正向压降。 在这条曲线上可以 看到 10 安培时的相同数据。 这一条的 正向压降 大约为 320 毫伏。 但这一条只有 大约 150 毫伏。 因此可以 大幅减少正向压降, 这意味着 整流器损耗更小, 热应力更小。 具体有多少损耗, 我们可以 通过对传导损耗 进行建模以及 对电流进行建模来计算损耗, 此处以反激式转换器为例。 对于这个特定的 肖特基二极管, 我们可以使用 固定电阻和固定压降 来逐步和线性地 对其正向压降进行建模。 同时,我们可以通过 RDS(ON) 对同步整流器的 正向压降进行建模。 与此同时,使用反激式 转换器次级侧电流, 在此处的显示结果 很像平均电流等于 输出电流的三角波形, 假设占空比为 50%, 那么可以计算出 均方根电流为这个数字, 而平均值为 这个数字。 因此,我们可以把损耗模型 应用于这个电流波形。 我们可以计算 二极管损耗和 SR 损耗。 从这条曲线可以 清楚地看到, 从二极管更改为 SR 可以节省 50% 以上的 传导损耗。同样的计算方法 也可以运用于 其他拓扑,比如 LLC。 然而,LLC 转换器 比反激式转换器 稍显复杂,因为电流 现在是三角形。 这里还有一个 例子,我展示的是 UCC24624,这是一个 SR 控制器,用于驱动 LLC 转换器的两个 SR。 在这个例子中, 我们可以把次级侧电流近似为 经过整流的正弦电流。 这里的平均电流 等于输出电流。 每个 SR 以正弦方式 承载一半的电流。 因此,我们将看到 流过 S1 的平均电流 和流过 S2 的 平均电流 等于输出电流的 一半。 此外可以基于 正弦形状来计算 它们的均方根电流。 虽然 LLC 电流不是 严格的正弦电流, 但正弦形状可以给我们 提供非常好的均方根电流 近似计算方法。 获得均方根电流 和平均电流后, 就可以回到 损耗模型, 并计算 SR 的 传导损耗。 在我们了解 SR 的 工作原理之后, 现在我们应该提出的 一个重要问题是, 我们要如何控制 这个 SR? 首先,有一些拓扑 非常简单。 它们无需任何 专用控制器 IC 就可以 实现 SR 控制。 这里有一个例子。 这个 PMP8740 会使用 UCC28950 这种相移全桥 控制器 来同时控制 初级侧控制器开关 和次级侧 SR。 SR 的控制信号 来自初级侧 控制器。 其他一些拓扑, 比如同步降压拓扑 或有源钳位正激式拓扑, 可以采用相同的控制方法。 例如,在同步降压 拓扑中, 对同步 整流器的 控制与控制开关 是互补的。 所以只需 设计和估算 这段时间来防止 两个开关之间发生 击穿。 我们可以控制 同步整流器。 在有源钳位 正激式转换器上, 甚至可以使用 自驱动方法, 即变压器 两端的电压 可用于直接驱动 同步整流器 并实现控制。 不过,还有 其他一些拓扑, 比如反激式、有源钳位 反激式或 LLC 等拓扑, 由于上述复杂性, 确实需要专用的 SR 控制器。 有一种 SR 控制方法 基于 V DS 检测。 我们在 UCC24610 中实现了这一点。 这种控制方法 基于对 SR 漏源极 之间电压降的 观察。 下面我们举例说明。 在体二极管导通之前, SR 电压处于高位。 当电流开始 流经体二极管时, SR 两端的电压降就是 这个体二极管的压降。 如果我们能设置 一个阈值 V TH_ON, 一旦 V TH_ON 两端 存在电压,我们便知道 电流正在流经体二极管, 我们就可以开启 SR 了。 一旦 SR 开启, 这个通道就会 变成一个电阻器, 这样就能 用来检测 流经 SR 的电流。 当电压降 非常接近于 0 时, 我们知道电流 也接近于 0, 我们可以设置 另一个阈值 V TH_OFF 来关闭 SR。 因此,可以 实现两个比较器 来控制 SR 的 开启和关闭。 这种控制方法 对拓扑没有限制。 但是,必须设计 这些比较器, 使它们能检测 非常高的电压, 而且还能检测 非常接近 0 的电压, 因为我们希望 这里的电流达到 0 并随后关闭 SR。当电压 非常接近 0 以后, 就必须处理 噪声、比较器 精度,等等。 我们无需设计 非常精确的 比较器以及使用 过去实现的其他方法, 而是采用伏秒平衡技术, 比如 UCC24630。 这款控制器利用了 DCM 反激式拓扑中的 伏秒平衡特性。 在 DCM 反激式拓扑中的 每个开关周期内 都会实现伏秒平衡, 如此图中所示, 在每个开关周期中, 变压器的 励磁电流从 0 变为最大值, 然后在每个开关周期中 再从最大值复位为 0。 这告诉我们, 当电流 达到 0 时, 正伏秒等于 负伏秒。 因此我们可以使用 这一特性来控制 SR 的关闭。 因为这个电路基本上 就是一个积分器, 所以对噪声的敏感度 要低得多。 但是,只有在 DCM 运行期间 才能实现伏秒平衡, 使用 CCM 时, 虽然在稳态 运行期间 是平衡的, 但在过渡期间 不能实现伏秒平衡。 所以这种方法 不能直接实现。 必须依赖 其他技术 才能在 CCM 条件下运行。 此外,这种方法 也不适合 LLC 和 有源钳位反激式拓扑 等拓扑结构,虽然电路 仍然实现了伏秒平衡, 但电流 过零点 不是伏秒 平衡点, 因此将无法 控制 SR。 VDS 检测方法更大程度上 是一种通用的控制方法, 因此我们将花更多的时间 介绍这种控制方法。 在我们弄清楚 控制方法之后, 接下来需要回答的 一个问题是,应该选择 哪一种 SR? SR 的额定电压 很简单。 这是由拓扑决定的。 所以,我们在 选择 SR 额定电压时 实际上并没有太多自由度。 但是可以 自由选择 FET 的大小以及 需要多低的 RDS(ON)。 通过前面的分析 可以知道,使用 SR 的 全部目的就是 试图减少传导损耗。 所以我们应该选择 尽可能低的 RDS(ON)。 但是,如果看一下 VDS 检测的控制方法, 我们就知道 当这个电流达到 V TH_OFF 时 表示正在关闭 SR。 关断电流实际上 等于 V TH_OFF 除以 RDS(ON)。 RDS(ON) 较低时 比 RDS(ON) 较高时 关闭 SR 的时间要早得多。 一旦 SR 关闭, 其余电流 都将流过 体二极管。 因此,即使选择 较低的 RDS(ON) 之后, 当 FET 导通时, 传导损耗 会低得多, 但由于 SR 的关闭时间 会早得多, 最终可能会产生 更高的传导损耗。 所以,必须注意 关断阈值的 负面影响。 所以,选择的 RDS(ON) 不能太小, 否则,可能得不到 想要的结果。 除了传导损耗, 我们还 必须注意 开关损耗。 整体 SR 损耗包括 传导损耗、开关损耗 和驱动器损耗。 传导损耗 取决于 RDS(ON),但前提是 能够完美控制 SR。 但是,开关损耗 和驱动器损耗 都与寄生电容 成正比。 我们都知道更低的 RDS(ON) 意味着更高的电容。 较低的传导损耗 通常会带来 较高的开关损耗。 这里显示了两条曲线,根据设计, 一条使用较低的 RDS(ON), 另一条使用较高的 RDS(ON), 我们可以看到在不同负载下 能够实现的效率。 所以可以看到, 如果使用更低的 RDS(ON), 可能可以在更重的 负载下实现更高的 效率。 但是,由于更高的 开关损耗, 在更轻的负载下 将出现更低的效率。 另一方面,如果 选择更高的 RDS(ON), 重负载的效率可能会更低, 但在更轻的负载下, 效率可能会更高。 因此,为 SR 选择合适的 RDS(ON) 实际上是一种 权衡利弊的过程。 还有一点必须注意, 根据效率标准的要求, 必须以四点平均值的方式 进行效率计算。 因此,轻载效率 与重载效率 同样重要。 而且,一些 效率标准 还需要 10% 的效率 才能达到一定的水平。 SR 面临的 挑战之一 是如何处理 连续传导负载。 在不同的拓扑中,比如 在反激式、正激式和 LLC 拓扑中, 经常会在 CCM 条件下运行, 在这种情况下, 电流将进入连续传导。 对于 LLC, 当开关频率 高于谐振频率的 时候,我们将 在初级侧开关 关闭后看到非常高的 di/dt 点位。 所以,这种情况下 我们也可以看到 这类似于 CCM 运行模式。 在所有这些 运行情况下 都将看到控制器必须 处理这个高 di/dt。 因此 SR 控制器必须 能够极其快速地响应。 让我们来看看这个 di/dt 的 更多细节。 对于反激式转换器, 在开始时的 次级侧 导通期间, 可以看到 di/dt 由 输出电压和 磁化电感决定。 一旦初级侧 接通,初级侧 和次级侧都将 导通,而电流 开始减小。 这个电流减小斜率 di/dt 实际上 由输入电压和 输出电压所共同决定, 而这些电压 是在漏电感上提供的。 由于电压高得多 且电感低得多, 因此这个 di/dt 将远高于这里的 di/dt。 此外,SR 控制器 应该能够 正好在过零点处 关闭 SR。 如果 SR 控制器的 响应速度不够快, 那么可能会延迟关闭。 这种情况将 产生负电流, 进而造成实际损耗。 而且有可能会 引入电压应力。 所以,比较器需要 非常快速地响应 以便最大限度减小 负电流。 这些情况提醒了我们 二极管反向恢复问题。 所以在这里,我将展示一种 典型的二极管反向恢复情况。 这是二极管的压降。 我们可以看到, 在二极管电流过零后, 它也不会关闭,一直到 TR 的 TA 时间到期为止。 这意味着,这相当于 SR 关闭延迟。 从这个表中 可以看出 反向恢复 越糟糕, 在进入 CCM 条件后产生的 开关损耗就越大。 这就说明了 在 CCM 条件下 运行时具备能够 响应高 di/dt 的 SR 控制器 有多么重要。 一旦了解这一情况后, 可能就会产生疑问, 为什么我不早点 关闭 SR, 这样我就不会延迟关闭了? 我们必须考虑两种情况。 如果过早 关闭 SR, 那么将会发生的情况就是, 电流最初是 流经 SR 通道的, 当源极关闭 SR 时, 电流将会 开始流向 体二极管。 因此,即使不处理 SR 关闭问题, 也要处理体二极管 反向恢复 问题。 另一方面,如果 太迟关闭 SR, 那么完全 不必处理 体二极管,但是 要处理 SR 关闭延迟问题。 因此,作为底线, 我们希望 击穿时间或 SR 关闭延迟时间 应该短于 体二极管 反向恢复时间, 对于 TA 部分, 我们希望短于 这个时间,这样就 不会比体二极管的行为更差。 另一件事情就是, 必须注意 二极管模式期间的 CCM 运行情况, 例如, 在启动期间 或过载条件下, 控制器可能 完全掉电。 在这种情况下,SR 必须 安然度过它的体二极管 反向恢复时间。 此外,如果能够访问 主开关的开启信号, 这也可能对时间控制 有所帮助, 因为这样可以 在正确的时间关闭 SR。 例如,使用 同步整流器降压转换器。 在同步降压转换器中, 可以在正确的时间 关闭 SR,从而最大限度 减小反向恢复时间。 SR 的其他 挑战包括 应对寄生振铃 或噪声。 对于反激式转换器, 如果在 DCM 模式下运行, 通常会观察到两次振铃。 第一次振铃 是 SR 开启后的 泄漏复位振铃。 在 SR 开启后, 泄漏复位, 此时将出现 大量噪声。 如果对这种情况 不采取应对措施, SR 可能会 立即关闭。 在 DCM 部分, 开关节点电容器 将与磁化电感器 一起共振。 这样将会产生 大型振铃, 并且这可能会低于地电平。 这样会开启体二极管, 并且 SR 有可能会 在错误的时间开启。 所以,还需要一些方法 处理 DCM 振铃问题。 我们经常使用 消隐时间 来避免强制关闭 或强制开启。 一旦在 LLC 转换器中运行, 消隐时间有时 会变得很方便。 我们在前面讨论过, LLC 转换器的电流形状 是正弦曲线。 如果观察电流形状, 可以发现, 导通开始时和结束时的 电流都非常小。 因此 SR 控制器 实际上无法分辨 这一点的小电流或 这一点的小电流。 所以可以开启 SR 并立即关闭。 为了避免 导通时间过短, 我们通常设置一个 最短导通时间, 使 SR 电流 稍微增大一点, 这样可以长时间 保持导通。 因此可以 在正确的时间关闭 SR。 最短导通时间 在 LLC 条件下也有帮助。 当我们使用 V DS 检测 来控制 SR 时, 需要注意的另一件事 是寄生电感器的影响。 当我们 检测到 V DS 时, 实际上检测到的 电压是该通道上的 SR 电压与 寄生电感电压的 组合。 虽然可以 通过优化布局 来最大限度减少 寄生电感,但封装电感 始终存在。 因此,检测到的 整体电压 是 RDS(ON) 电压 和 L di/dt 电压。 以 LLC 电流 为例, 可以看到, 在上升沿期间, 当电流增加时, 因为 di/dt 为正, 控制器看到的电流 比预期的要多。 另一方面, 在负斜率期间, 电流下降时, di/dt 为负, 因此,控制器 看到的电流 小于实际电流。 因此,控制器可能会 过早关闭 SR。 然后在 SR 关闭后, 其余电流 流过体二极管 并产生较大的传导损耗。 为了避免这种情况, 首先要做的 就是选择具有 低封装电感的器件, 以便最大限度 缩短这个时间, 使这些关断点 尽可能靠近末端。 我们在控制器 UCC24612 和 UCC24624 中 实现的另一种技术, 就是使用所谓的 比例栅极驱动器。 比例栅极驱动器的 理念在于, 尽可能降低 栅极电压。 我们不需要 完全开启 SR, 而是将其设置为 低压固定正向压降。 在这段时间内, 即使增加传导损耗, 但由于电流很小, 因此传导损耗的 增加量处于 最低限度。 但是,这种做法可以带来 额外的好处。 首先,我们 将它关闭后, 电压电平将接近 MOSFET 阈值电压。 因此,如果 进入 CCM 运行模式, 延迟将会缩短。 而且,因为我们会 产生更高的压降, 所以即使仍然远低于 二极管的整个压降, 但是,它对 寄生电感器将不会 那么敏感。 所以可以大幅减小 关闭位置与 零交叉点之间的距离。 这里有几个例子。 这个 PMP 设计和 28780EVM 两个都使用 24612 在 LLC 和有源钳位 反激式转换器上 实现高效率。 我们可以把 同步整流器 放置在不同位置。 观察这里的 这个波形可以看到, 我用二极管 简化了整流器。 因此可以看到, 我可以在正通路上放一个二极管, 或者我也可以在负通路上 放一个二极管。 它们都可以 整流输出电压。 将二极管放在 不同位置 有不同的结果。 如果我们 将 SR 放在高侧, 当然它更难驱动, 因为源极在这里, 输出接地在这里, 所以,更难 驱动 SR。 可能需要进行电平转换, 或者需要高侧偏置。 但是可以带来更好 或更低的 EMI。 我们之前讲过这里, 如果观察所有的红色箭头, 可以看到这些是 共模电流。 两个开关节点: 这里和这里。 这里的开关节点 是初级侧开关节点, 开关节点波形 看起来是这样的。 如果我们看一下 这里的上升沿, 一旦开关节点升起, 当关闭开关时, 开关节点将上升。 同时,次级侧 开关节点 也将上升, 试图开启整流器。 在此期间, 因为这个上升沿 会迫使电流 从初级侧通过 C2 流向次级侧, 而这个上升沿 会迫使电流 通过 C1 从次级侧 流向初级侧, 所以,这两个电流 实际上可以相互抵消 并有助于改善 EMI。 另一方面, 可以将整流器 放在底部。 低侧 SR 可以 带来一些好处, 即以输出接地为基准, 便于驱动。 而且可以 轻松偏置 IC。 但是,如果查看 开关节点和 共模噪声, 当初级侧关闭时, 开关节点上升, 次级侧开关节点 实际上会下降 以便让整流器导通。 然后会有更多电流 流过 C2, 而没有电流 流过 C1。 所以抵消 效应没有了。 最终将产生 更多的 EMI 噪声。 在实现同步 整流器之后, 必须注意偏置、 驱动和 EMI 噪声。 总结一下,SR MOSFET 相对于二极管 提供更低的 导通压降和传导损耗。 SR 可能并非总是合理的选择。 具体要取决于 输出电压和输出电流 以及功率级别。 注意低 RDS(ON) 和 高 C OSS 之间的权衡。 注意 RDS(ON) 变得过低 对于 V DS 检测控制 所带来的影响。 注意过早关闭和 体二极管反向恢复。 实际上,这可能 比短 CCM 击穿更糟糕。 另外,请注意 低侧整流的 EMI 影响。 这里有一些 阅读材料 有助于进一步 理解本次演示的 内容。 本次演示就到这里。 感谢您的关注。 570
大家好!
欢迎观看本次演示。
我叫 Bing Lu。
今天我要介绍的是 同步整流什么时候可以
提高效率?
本次演示是由我和 Bernard Keogh 准备的。
这次培训将介绍 什么内容?
本次演示的 目的是
尝试解释 SR 的工作原理, 说明它们何时有效,
展示针对它们的 各种控制方法,
指出一些需要注意的缺点, 并提供一些设计
示例。
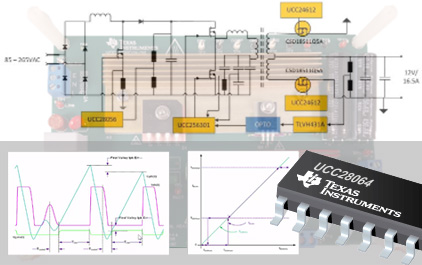
本次演示中 将会提及的
器件型号包括 UCC24612、UCC24610、
UCC24630 和 UCC24624。
相关参考设计 包括台式机电源、
工业电源、 电视机电源
以及 USB PD 适配器。
因此,本主题将 与不同的应用相关,
尤其会介绍 需要高效率
和更出色的 热管理性能的
隔离式电源。
首先,我们将讨论 同步整流。
如何工作?
通常,我们使用二极管 作为整流方法。
它很简单。
它会自动 开启和关闭。
但是,我们可以用 MOSFET 代替二极管,
使体二极管的方向 与二极管整流器
相同。
因此,如果我们使用 N 沟道增强型 MOSFET
作为开关器件, 当我们关闭栅极时,
将看到通道关闭。
这样,电流仍然会 流经体二极管,
就像存在 二极管整流器一样。
但是,当开启 MOSFET 时,
MOSFET 会成为 带有双向
连接通道的 传导通路,
因此可以把来自 体二极管的电流引导至
通道中。
如果我们可以 控制 MOSFET 栅极,
将栅极导通为高电平, 就能使电流流经体二极管。
所以,当电流应该 流经体二极管时,
我们可以开启 SR 栅极。
而通道中的电流 应该衰减到零时,
我们可以关闭 SR 栅极。
因此,MOSFET 与 二极管同步工作,
从而实现所谓的 同步整流。
为什么我们要使用 同步整流?
简单来说就是为了获得 更好的效率和高功率
密度。
需要高效率 有几个原因。
其中之一是 达到效率标准。
DoE 和 CoC 都要求 外部适配器
具有高效率, 因此
必须满足 效率标准
才能销售产品。
其他标准, 比如 80 Plus,
也定义了 台式机电源的
效率要求。
需要高效率的 另一个原因
是提高功率密度。
例如,一些旅行适配器 就有这种需求。
通常希望适配器 尽可能小,
这样会 更方便携带。
而对于其他用途, 例如 DIN 轨电源,
通常希望它们 具有更小的尺寸,
这样在同一机架中 可以安装更多的电源
并提供更高的 功率处理能力。
另一个原因是 为了解决热问题
并提高可靠性。
由于 SR 能够 降低传导损耗,
提高效率, 并降低总体内部功率
损耗,
因此我们可以降低 运行成本,
还可以减少 需要消散的热量,
进而能够降低 热管理成本,
消除二极管 整流器热点,
提高稳定性、可靠性 和使用寿命。
现在,让我们看看 二极管整流器损耗。
二极管整流器中 有多少损耗?
这里有一个简单的例子, 反激式转换器。
在反激式转换器中 可以看到
输出电流全部 流经输出
整流器二极管。
出现这种情况的 原因是输出电容器
不接受直流电流。
所以,所有的直流电流 都流经二极管。
不仅仅只有反激式拓扑 存在这种情况,
分析整流器二极管时 会发现许多
其他拓扑也会 出现这种情况。
如果要计算 二极管的损耗,
可以简单地将 二极管正向压降
建模为固定值, 即 V f,然后乘以
输出电压。
因此,功率与 输出电流
以及正向压降成正比。
也就是说, 较低的正向压降
在二极管上会产生 较少的传导损耗。
如果假设电路的 其余部分
具有 100% 的效率, 那么可以轻松
计算出二极管整流器效率, 即输出电压
除以输出电压 加正向压降,
然后将其绘制在 此曲线中,
此处假设 正向压降
为 0.5 伏。
在这条曲线中 可以清楚地看到,
输出电压 较低时效率会
变差。
出现这种情况的 原因是正向压降
成为了输出电压的 较大部分。
所以,当输出电压较低时, 整流器很有意义。
而当输出电压较低时, 整流器的作用
就越来越小。
假设现在有 1000 伏的输出电压,
使用同步整流器 是否有意义呢?
也许没有。
使用同步整流器 可以减少多少
损耗呢?
这里是肖特基二极管 和同步整流器
之间的直接比较 情况。
肖特基二极管,就是这一个 25 安培 60 伏特的肖特基二极管。
在 10 安培时, 该器件的正向压降
为 0.37 伏特。
我们可以把正向压降 作为正向电流的函数
绘制在这条红色曲线中, 这里的温度
是 125 摄氏度。
同时,我们找到 一个同步整流器,
这个器件具有相同的 额定电压 60 伏特。
另外,这个器件 在 125 摄氏度时的
RDS(ON) 为 15.3 毫欧。 我们同样可以
绘制另一条曲线, 表示同步整流器
在不同正向电流下的正向压降。
在这条曲线上可以 看到 10 安培时的相同数据。
这一条的 正向压降
大约为 320 毫伏。
但这一条只有 大约 150 毫伏。
因此可以 大幅减少正向压降,
这意味着 整流器损耗更小,
热应力更小。
具体有多少损耗, 我们可以
通过对传导损耗 进行建模以及
对电流进行建模来计算损耗, 此处以反激式转换器为例。
对于这个特定的 肖特基二极管,
我们可以使用 固定电阻和固定压降
来逐步和线性地 对其正向压降进行建模。
同时,我们可以通过 RDS(ON) 对同步整流器的
正向压降进行建模。
与此同时,使用反激式 转换器次级侧电流,
在此处的显示结果 很像平均电流等于
输出电流的三角波形, 假设占空比为 50%,
那么可以计算出 均方根电流为这个数字,
而平均值为 这个数字。
因此,我们可以把损耗模型 应用于这个电流波形。
我们可以计算 二极管损耗和 SR 损耗。
从这条曲线可以 清楚地看到,
从二极管更改为 SR 可以节省 50% 以上的
传导损耗。同样的计算方法 也可以运用于
其他拓扑,比如 LLC。
然而,LLC 转换器 比反激式转换器
稍显复杂,因为电流 现在是三角形。
这里还有一个 例子,我展示的是
UCC24624,这是一个 SR 控制器,用于驱动
LLC 转换器的两个 SR。
在这个例子中, 我们可以把次级侧电流近似为
经过整流的正弦电流。
这里的平均电流 等于输出电流。
每个 SR 以正弦方式
承载一半的电流。
因此,我们将看到 流过 S1 的平均电流
和流过 S2 的 平均电流
等于输出电流的 一半。
此外可以基于 正弦形状来计算
它们的均方根电流。
虽然 LLC 电流不是 严格的正弦电流,
但正弦形状可以给我们 提供非常好的均方根电流
近似计算方法。
获得均方根电流 和平均电流后,
就可以回到 损耗模型,
并计算 SR 的 传导损耗。
在我们了解 SR 的 工作原理之后,
现在我们应该提出的 一个重要问题是,
我们要如何控制 这个 SR?
首先,有一些拓扑 非常简单。
它们无需任何 专用控制器 IC 就可以
实现 SR 控制。
这里有一个例子。
这个 PMP8740 会使用 UCC28950
这种相移全桥 控制器
来同时控制 初级侧控制器开关
和次级侧 SR。
SR 的控制信号 来自初级侧
控制器。
其他一些拓扑, 比如同步降压拓扑
或有源钳位正激式拓扑, 可以采用相同的控制方法。
例如,在同步降压 拓扑中,
对同步 整流器的
控制与控制开关 是互补的。
所以只需 设计和估算
这段时间来防止 两个开关之间发生
击穿。
我们可以控制 同步整流器。
在有源钳位 正激式转换器上,
甚至可以使用 自驱动方法,
即变压器 两端的电压
可用于直接驱动 同步整流器
并实现控制。
不过,还有 其他一些拓扑,
比如反激式、有源钳位 反激式或 LLC 等拓扑,
由于上述复杂性, 确实需要专用的
SR 控制器。
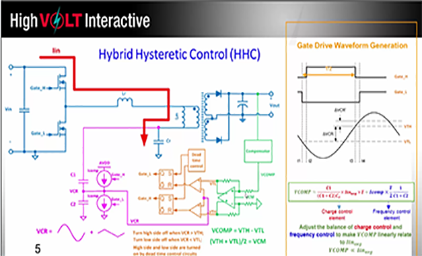
有一种 SR 控制方法 基于 V DS 检测。
我们在 UCC24610 中实现了这一点。
这种控制方法 基于对 SR 漏源极
之间电压降的 观察。
下面我们举例说明。
在体二极管导通之前, SR 电压处于高位。
当电流开始 流经体二极管时,
SR 两端的电压降就是 这个体二极管的压降。
如果我们能设置 一个阈值 V TH_ON,
一旦 V TH_ON 两端 存在电压,我们便知道
电流正在流经体二极管, 我们就可以开启 SR 了。
一旦 SR 开启, 这个通道就会
变成一个电阻器, 这样就能
用来检测 流经 SR 的电流。
当电压降 非常接近于 0 时,
我们知道电流 也接近于 0,
我们可以设置 另一个阈值 V TH_OFF
来关闭 SR。
因此,可以 实现两个比较器
来控制 SR 的 开启和关闭。
这种控制方法 对拓扑没有限制。
但是,必须设计 这些比较器,
使它们能检测 非常高的电压,
而且还能检测 非常接近 0 的电压,
因为我们希望 这里的电流达到 0
并随后关闭 SR。当电压 非常接近 0 以后,
就必须处理 噪声、比较器
精度,等等。
我们无需设计 非常精确的
比较器以及使用 过去实现的其他方法,
而是采用伏秒平衡技术, 比如 UCC24630。
这款控制器利用了 DCM 反激式拓扑中的
伏秒平衡特性。
在 DCM 反激式拓扑中的 每个开关周期内
都会实现伏秒平衡, 如此图中所示,
在每个开关周期中, 变压器的
励磁电流从 0 变为最大值,
然后在每个开关周期中 再从最大值复位为 0。
这告诉我们, 当电流
达到 0 时, 正伏秒等于
负伏秒。
因此我们可以使用 这一特性来控制 SR 的关闭。
因为这个电路基本上 就是一个积分器,
所以对噪声的敏感度 要低得多。
但是,只有在 DCM 运行期间 才能实现伏秒平衡,
使用 CCM 时, 虽然在稳态
运行期间 是平衡的,
但在过渡期间 不能实现伏秒平衡。
所以这种方法 不能直接实现。
必须依赖 其他技术
才能在 CCM 条件下运行。
此外,这种方法 也不适合 LLC 和
有源钳位反激式拓扑 等拓扑结构,虽然电路
仍然实现了伏秒平衡,
但电流 过零点
不是伏秒 平衡点,
因此将无法 控制 SR。
VDS 检测方法更大程度上 是一种通用的控制方法,
因此我们将花更多的时间 介绍这种控制方法。
在我们弄清楚 控制方法之后,
接下来需要回答的 一个问题是,应该选择
哪一种 SR?
SR 的额定电压 很简单。
这是由拓扑决定的。
所以,我们在 选择 SR 额定电压时
实际上并没有太多自由度。
但是可以 自由选择
FET 的大小以及 需要多低的 RDS(ON)。
通过前面的分析 可以知道,使用 SR 的
全部目的就是 试图减少传导损耗。
所以我们应该选择 尽可能低的 RDS(ON)。
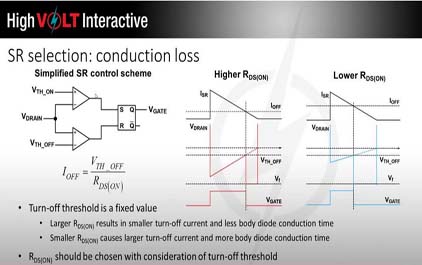
但是,如果看一下 VDS 检测的控制方法,
我们就知道 当这个电流达到 V TH_OFF 时
表示正在关闭 SR。
关断电流实际上 等于 V TH_OFF
除以 RDS(ON)。
RDS(ON) 较低时 比 RDS(ON) 较高时
关闭 SR 的时间要早得多。
一旦 SR 关闭, 其余电流
都将流过 体二极管。
因此,即使选择 较低的 RDS(ON) 之后,
当 FET 导通时, 传导损耗
会低得多,
但由于 SR 的关闭时间 会早得多,
最终可能会产生 更高的传导损耗。
所以,必须注意 关断阈值的
负面影响。
所以,选择的 RDS(ON) 不能太小,
否则,可能得不到 想要的结果。
除了传导损耗, 我们还
必须注意 开关损耗。
整体 SR 损耗包括 传导损耗、开关损耗
和驱动器损耗。
传导损耗 取决于
RDS(ON),但前提是 能够完美控制 SR。
但是,开关损耗 和驱动器损耗
都与寄生电容 成正比。
我们都知道更低的 RDS(ON) 意味着更高的电容。
较低的传导损耗 通常会带来
较高的开关损耗。
这里显示了两条曲线,根据设计, 一条使用较低的 RDS(ON),
另一条使用较高的 RDS(ON), 我们可以看到在不同负载下
能够实现的效率。
所以可以看到, 如果使用更低的 RDS(ON),
可能可以在更重的 负载下实现更高的
效率。
但是,由于更高的 开关损耗,
在更轻的负载下 将出现更低的效率。
另一方面,如果 选择更高的 RDS(ON),
重负载的效率可能会更低, 但在更轻的负载下,
效率可能会更高。
因此,为 SR 选择合适的 RDS(ON) 实际上是一种
权衡利弊的过程。
还有一点必须注意, 根据效率标准的要求,
必须以四点平均值的方式 进行效率计算。
因此,轻载效率 与重载效率
同样重要。
而且,一些 效率标准
还需要 10% 的效率 才能达到一定的水平。
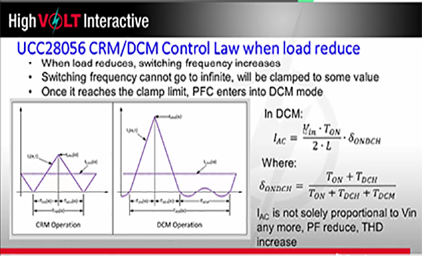
SR 面临的 挑战之一
是如何处理 连续传导负载。
在不同的拓扑中,比如 在反激式、正激式和 LLC 拓扑中,
经常会在 CCM 条件下运行,
在这种情况下, 电流将进入连续传导。
对于 LLC, 当开关频率
高于谐振频率的 时候,我们将
在初级侧开关 关闭后看到非常高的
di/dt 点位。
所以,这种情况下 我们也可以看到
这类似于 CCM 运行模式。
在所有这些 运行情况下
都将看到控制器必须 处理这个高 di/dt。
因此 SR 控制器必须 能够极其快速地响应。
让我们来看看这个 di/dt 的 更多细节。
对于反激式转换器, 在开始时的
次级侧 导通期间,
可以看到 di/dt 由
输出电压和 磁化电感决定。
一旦初级侧 接通,初级侧
和次级侧都将 导通,而电流
开始减小。
这个电流减小斜率 di/dt 实际上
由输入电压和 输出电压所共同决定,
而这些电压 是在漏电感上提供的。
由于电压高得多 且电感低得多,
因此这个 di/dt 将远高于这里的 di/dt。
此外,SR 控制器 应该能够
正好在过零点处 关闭 SR。
如果 SR 控制器的 响应速度不够快,
那么可能会延迟关闭。
这种情况将 产生负电流,
进而造成实际损耗。
而且有可能会 引入电压应力。
所以,比较器需要 非常快速地响应
以便最大限度减小 负电流。
这些情况提醒了我们 二极管反向恢复问题。
所以在这里,我将展示一种 典型的二极管反向恢复情况。
这是二极管的压降。
我们可以看到, 在二极管电流过零后,
它也不会关闭,一直到 TR 的 TA 时间到期为止。
这意味着,这相当于 SR 关闭延迟。
从这个表中 可以看出
反向恢复 越糟糕,
在进入 CCM 条件后产生的
开关损耗就越大。
这就说明了 在 CCM 条件下
运行时具备能够 响应高 di/dt 的
SR 控制器 有多么重要。
一旦了解这一情况后, 可能就会产生疑问,
为什么我不早点 关闭 SR,
这样我就不会延迟关闭了?
我们必须考虑两种情况。
如果过早 关闭 SR,
那么将会发生的情况就是, 电流最初是
流经 SR 通道的,
当源极关闭 SR 时, 电流将会
开始流向 体二极管。
因此,即使不处理 SR 关闭问题,
也要处理体二极管 反向恢复
问题。
另一方面,如果 太迟关闭 SR,
那么完全 不必处理
体二极管,但是 要处理 SR
关闭延迟问题。
因此,作为底线, 我们希望
击穿时间或 SR 关闭延迟时间
应该短于 体二极管
反向恢复时间, 对于 TA 部分,
我们希望短于 这个时间,这样就
不会比体二极管的行为更差。
另一件事情就是, 必须注意
二极管模式期间的 CCM 运行情况,
例如, 在启动期间
或过载条件下, 控制器可能
完全掉电。
在这种情况下,SR 必须 安然度过它的体二极管
反向恢复时间。
此外,如果能够访问 主开关的开启信号,
这也可能对时间控制 有所帮助,
因为这样可以 在正确的时间关闭 SR。
例如,使用 同步整流器降压转换器。
在同步降压转换器中, 可以在正确的时间
关闭 SR,从而最大限度 减小反向恢复时间。
SR 的其他 挑战包括
应对寄生振铃 或噪声。
对于反激式转换器, 如果在 DCM 模式下运行,
通常会观察到两次振铃。
第一次振铃 是 SR 开启后的
泄漏复位振铃。
在 SR 开启后, 泄漏复位,
此时将出现 大量噪声。
如果对这种情况 不采取应对措施,
SR 可能会 立即关闭。
在 DCM 部分, 开关节点电容器
将与磁化电感器 一起共振。
这样将会产生 大型振铃,
并且这可能会低于地电平。
这样会开启体二极管, 并且 SR 有可能会
在错误的时间开启。
所以,还需要一些方法 处理 DCM 振铃问题。
我们经常使用 消隐时间
来避免强制关闭 或强制开启。
一旦在 LLC 转换器中运行,
消隐时间有时 会变得很方便。
我们在前面讨论过, LLC 转换器的电流形状
是正弦曲线。
如果观察电流形状, 可以发现,
导通开始时和结束时的 电流都非常小。
因此 SR 控制器 实际上无法分辨
这一点的小电流或 这一点的小电流。
所以可以开启 SR 并立即关闭。
为了避免 导通时间过短,
我们通常设置一个 最短导通时间,
使 SR 电流 稍微增大一点,
这样可以长时间 保持导通。
因此可以 在正确的时间关闭 SR。
最短导通时间 在 LLC 条件下也有帮助。
当我们使用 V DS 检测 来控制 SR 时,
需要注意的另一件事 是寄生电感器的影响。
当我们 检测到 V DS 时,
实际上检测到的 电压是该通道上的
SR 电压与 寄生电感电压的
组合。
虽然可以 通过优化布局
来最大限度减少 寄生电感,但封装电感
始终存在。
因此,检测到的 整体电压
是 RDS(ON) 电压 和 L di/dt 电压。
以 LLC 电流 为例,
可以看到, 在上升沿期间,
当电流增加时, 因为 di/dt 为正,
控制器看到的电流 比预期的要多。
另一方面, 在负斜率期间,
电流下降时, di/dt 为负,
因此,控制器 看到的电流
小于实际电流。
因此,控制器可能会 过早关闭 SR。
然后在 SR 关闭后, 其余电流
流过体二极管 并产生较大的传导损耗。
为了避免这种情况, 首先要做的
就是选择具有 低封装电感的器件,
以便最大限度 缩短这个时间,
使这些关断点 尽可能靠近末端。
我们在控制器 UCC24612 和 UCC24624 中
实现的另一种技术,
就是使用所谓的 比例栅极驱动器。
比例栅极驱动器的 理念在于,
尽可能降低 栅极电压。
我们不需要 完全开启 SR,
而是将其设置为 低压固定正向压降。
在这段时间内, 即使增加传导损耗,
但由于电流很小, 因此传导损耗的
增加量处于 最低限度。
但是,这种做法可以带来 额外的好处。
首先,我们 将它关闭后,
电压电平将接近 MOSFET 阈值电压。
因此,如果 进入 CCM 运行模式,
延迟将会缩短。
而且,因为我们会 产生更高的压降,
所以即使仍然远低于 二极管的整个压降,
但是,它对 寄生电感器将不会
那么敏感。
所以可以大幅减小 关闭位置与
零交叉点之间的距离。
这里有几个例子。
这个 PMP 设计和 28780EVM 两个都使用 24612
在 LLC 和有源钳位 反激式转换器上
实现高效率。
我们可以把 同步整流器
放置在不同位置。
观察这里的 这个波形可以看到,
我用二极管 简化了整流器。
因此可以看到, 我可以在正通路上放一个二极管,
或者我也可以在负通路上 放一个二极管。
它们都可以 整流输出电压。
将二极管放在 不同位置
有不同的结果。
如果我们 将 SR 放在高侧,
当然它更难驱动, 因为源极在这里,
输出接地在这里,
所以,更难 驱动 SR。
可能需要进行电平转换, 或者需要高侧偏置。
但是可以带来更好 或更低的 EMI。
我们之前讲过这里, 如果观察所有的红色箭头,
可以看到这些是 共模电流。
两个开关节点: 这里和这里。
这里的开关节点 是初级侧开关节点,
开关节点波形 看起来是这样的。
如果我们看一下 这里的上升沿,
一旦开关节点升起, 当关闭开关时,
开关节点将上升。
同时,次级侧 开关节点
也将上升, 试图开启整流器。
在此期间, 因为这个上升沿
会迫使电流 从初级侧通过 C2
流向次级侧,
而这个上升沿 会迫使电流
通过 C1 从次级侧 流向初级侧,
所以,这两个电流 实际上可以相互抵消
并有助于改善 EMI。
另一方面, 可以将整流器
放在底部。
低侧 SR 可以 带来一些好处,
即以输出接地为基准, 便于驱动。
而且可以 轻松偏置 IC。
但是,如果查看 开关节点和
共模噪声, 当初级侧关闭时,
开关节点上升, 次级侧开关节点
实际上会下降 以便让整流器导通。
然后会有更多电流 流过 C2,
而没有电流 流过 C1。
所以抵消 效应没有了。
最终将产生 更多的 EMI 噪声。
在实现同步 整流器之后,
必须注意偏置、 驱动和 EMI
噪声。
总结一下,SR MOSFET 相对于二极管
提供更低的 导通压降和传导损耗。
SR 可能并非总是合理的选择。
具体要取决于 输出电压和输出电流
以及功率级别。
注意低 RDS(ON) 和 高 C OSS 之间的权衡。
注意 RDS(ON) 变得过低 对于 V DS 检测控制
所带来的影响。
注意过早关闭和 体二极管反向恢复。
实际上,这可能 比短 CCM 击穿更糟糕。
另外,请注意 低侧整流的
EMI 影响。
这里有一些 阅读材料
有助于进一步 理解本次演示的
内容。
本次演示就到这里。
感谢您的关注。 570
大家好! 欢迎观看本次演示。 我叫 Bing Lu。 今天我要介绍的是 同步整流什么时候可以 提高效率? 本次演示是由我和 Bernard Keogh 准备的。 这次培训将介绍 什么内容? 本次演示的 目的是 尝试解释 SR 的工作原理, 说明它们何时有效, 展示针对它们的 各种控制方法, 指出一些需要注意的缺点, 并提供一些设计 示例。 本次演示中 将会提及的 器件型号包括 UCC24612、UCC24610、 UCC24630 和 UCC24624。 相关参考设计 包括台式机电源、 工业电源、 电视机电源 以及 USB PD 适配器。 因此,本主题将 与不同的应用相关, 尤其会介绍 需要高效率 和更出色的 热管理性能的 隔离式电源。 首先,我们将讨论 同步整流。 如何工作? 通常,我们使用二极管 作为整流方法。 它很简单。 它会自动 开启和关闭。 但是,我们可以用 MOSFET 代替二极管, 使体二极管的方向 与二极管整流器 相同。 因此,如果我们使用 N 沟道增强型 MOSFET 作为开关器件, 当我们关闭栅极时, 将看到通道关闭。 这样,电流仍然会 流经体二极管, 就像存在 二极管整流器一样。 但是,当开启 MOSFET 时, MOSFET 会成为 带有双向 连接通道的 传导通路, 因此可以把来自 体二极管的电流引导至 通道中。 如果我们可以 控制 MOSFET 栅极, 将栅极导通为高电平, 就能使电流流经体二极管。 所以,当电流应该 流经体二极管时, 我们可以开启 SR 栅极。 而通道中的电流 应该衰减到零时, 我们可以关闭 SR 栅极。 因此,MOSFET 与 二极管同步工作, 从而实现所谓的 同步整流。 为什么我们要使用 同步整流? 简单来说就是为了获得 更好的效率和高功率 密度。 需要高效率 有几个原因。 其中之一是 达到效率标准。 DoE 和 CoC 都要求 外部适配器 具有高效率, 因此 必须满足 效率标准 才能销售产品。 其他标准, 比如 80 Plus, 也定义了 台式机电源的 效率要求。 需要高效率的 另一个原因 是提高功率密度。 例如,一些旅行适配器 就有这种需求。 通常希望适配器 尽可能小, 这样会 更方便携带。 而对于其他用途, 例如 DIN 轨电源, 通常希望它们 具有更小的尺寸, 这样在同一机架中 可以安装更多的电源 并提供更高的 功率处理能力。 另一个原因是 为了解决热问题 并提高可靠性。 由于 SR 能够 降低传导损耗, 提高效率, 并降低总体内部功率 损耗, 因此我们可以降低 运行成本, 还可以减少 需要消散的热量, 进而能够降低 热管理成本, 消除二极管 整流器热点, 提高稳定性、可靠性 和使用寿命。 现在,让我们看看 二极管整流器损耗。 二极管整流器中 有多少损耗? 这里有一个简单的例子, 反激式转换器。 在反激式转换器中 可以看到 输出电流全部 流经输出 整流器二极管。 出现这种情况的 原因是输出电容器 不接受直流电流。 所以,所有的直流电流 都流经二极管。 不仅仅只有反激式拓扑 存在这种情况, 分析整流器二极管时 会发现许多 其他拓扑也会 出现这种情况。 如果要计算 二极管的损耗, 可以简单地将 二极管正向压降 建模为固定值, 即 V f,然后乘以 输出电压。 因此,功率与 输出电流 以及正向压降成正比。 也就是说, 较低的正向压降 在二极管上会产生 较少的传导损耗。 如果假设电路的 其余部分 具有 100% 的效率, 那么可以轻松 计算出二极管整流器效率, 即输出电压 除以输出电压 加正向压降, 然后将其绘制在 此曲线中, 此处假设 正向压降 为 0.5 伏。 在这条曲线中 可以清楚地看到, 输出电压 较低时效率会 变差。 出现这种情况的 原因是正向压降 成为了输出电压的 较大部分。 所以,当输出电压较低时, 整流器很有意义。 而当输出电压较低时, 整流器的作用 就越来越小。 假设现在有 1000 伏的输出电压, 使用同步整流器 是否有意义呢? 也许没有。 使用同步整流器 可以减少多少 损耗呢? 这里是肖特基二极管 和同步整流器 之间的直接比较 情况。 肖特基二极管,就是这一个 25 安培 60 伏特的肖特基二极管。 在 10 安培时, 该器件的正向压降 为 0.37 伏特。 我们可以把正向压降 作为正向电流的函数 绘制在这条红色曲线中, 这里的温度 是 125 摄氏度。 同时,我们找到 一个同步整流器, 这个器件具有相同的 额定电压 60 伏特。 另外,这个器件 在 125 摄氏度时的 RDS(ON) 为 15.3 毫欧。 我们同样可以 绘制另一条曲线, 表示同步整流器 在不同正向电流下的正向压降。 在这条曲线上可以 看到 10 安培时的相同数据。 这一条的 正向压降 大约为 320 毫伏。 但这一条只有 大约 150 毫伏。 因此可以 大幅减少正向压降, 这意味着 整流器损耗更小, 热应力更小。 具体有多少损耗, 我们可以 通过对传导损耗 进行建模以及 对电流进行建模来计算损耗, 此处以反激式转换器为例。 对于这个特定的 肖特基二极管, 我们可以使用 固定电阻和固定压降 来逐步和线性地 对其正向压降进行建模。 同时,我们可以通过 RDS(ON) 对同步整流器的 正向压降进行建模。 与此同时,使用反激式 转换器次级侧电流, 在此处的显示结果 很像平均电流等于 输出电流的三角波形, 假设占空比为 50%, 那么可以计算出 均方根电流为这个数字, 而平均值为 这个数字。 因此,我们可以把损耗模型 应用于这个电流波形。 我们可以计算 二极管损耗和 SR 损耗。 从这条曲线可以 清楚地看到, 从二极管更改为 SR 可以节省 50% 以上的 传导损耗。同样的计算方法 也可以运用于 其他拓扑,比如 LLC。 然而,LLC 转换器 比反激式转换器 稍显复杂,因为电流 现在是三角形。 这里还有一个 例子,我展示的是 UCC24624,这是一个 SR 控制器,用于驱动 LLC 转换器的两个 SR。 在这个例子中, 我们可以把次级侧电流近似为 经过整流的正弦电流。 这里的平均电流 等于输出电流。 每个 SR 以正弦方式 承载一半的电流。 因此,我们将看到 流过 S1 的平均电流 和流过 S2 的 平均电流 等于输出电流的 一半。 此外可以基于 正弦形状来计算 它们的均方根电流。 虽然 LLC 电流不是 严格的正弦电流, 但正弦形状可以给我们 提供非常好的均方根电流 近似计算方法。 获得均方根电流 和平均电流后, 就可以回到 损耗模型, 并计算 SR 的 传导损耗。 在我们了解 SR 的 工作原理之后, 现在我们应该提出的 一个重要问题是, 我们要如何控制 这个 SR? 首先,有一些拓扑 非常简单。 它们无需任何 专用控制器 IC 就可以 实现 SR 控制。 这里有一个例子。 这个 PMP8740 会使用 UCC28950 这种相移全桥 控制器 来同时控制 初级侧控制器开关 和次级侧 SR。 SR 的控制信号 来自初级侧 控制器。 其他一些拓扑, 比如同步降压拓扑 或有源钳位正激式拓扑, 可以采用相同的控制方法。 例如,在同步降压 拓扑中, 对同步 整流器的 控制与控制开关 是互补的。 所以只需 设计和估算 这段时间来防止 两个开关之间发生 击穿。 我们可以控制 同步整流器。 在有源钳位 正激式转换器上, 甚至可以使用 自驱动方法, 即变压器 两端的电压 可用于直接驱动 同步整流器 并实现控制。 不过,还有 其他一些拓扑, 比如反激式、有源钳位 反激式或 LLC 等拓扑, 由于上述复杂性, 确实需要专用的 SR 控制器。 有一种 SR 控制方法 基于 V DS 检测。 我们在 UCC24610 中实现了这一点。 这种控制方法 基于对 SR 漏源极 之间电压降的 观察。 下面我们举例说明。 在体二极管导通之前, SR 电压处于高位。 当电流开始 流经体二极管时, SR 两端的电压降就是 这个体二极管的压降。 如果我们能设置 一个阈值 V TH_ON, 一旦 V TH_ON 两端 存在电压,我们便知道 电流正在流经体二极管, 我们就可以开启 SR 了。 一旦 SR 开启, 这个通道就会 变成一个电阻器, 这样就能 用来检测 流经 SR 的电流。 当电压降 非常接近于 0 时, 我们知道电流 也接近于 0, 我们可以设置 另一个阈值 V TH_OFF 来关闭 SR。 因此,可以 实现两个比较器 来控制 SR 的 开启和关闭。 这种控制方法 对拓扑没有限制。 但是,必须设计 这些比较器, 使它们能检测 非常高的电压, 而且还能检测 非常接近 0 的电压, 因为我们希望 这里的电流达到 0 并随后关闭 SR。当电压 非常接近 0 以后, 就必须处理 噪声、比较器 精度,等等。 我们无需设计 非常精确的 比较器以及使用 过去实现的其他方法, 而是采用伏秒平衡技术, 比如 UCC24630。 这款控制器利用了 DCM 反激式拓扑中的 伏秒平衡特性。 在 DCM 反激式拓扑中的 每个开关周期内 都会实现伏秒平衡, 如此图中所示, 在每个开关周期中, 变压器的 励磁电流从 0 变为最大值, 然后在每个开关周期中 再从最大值复位为 0。 这告诉我们, 当电流 达到 0 时, 正伏秒等于 负伏秒。 因此我们可以使用 这一特性来控制 SR 的关闭。 因为这个电路基本上 就是一个积分器, 所以对噪声的敏感度 要低得多。 但是,只有在 DCM 运行期间 才能实现伏秒平衡, 使用 CCM 时, 虽然在稳态 运行期间 是平衡的, 但在过渡期间 不能实现伏秒平衡。 所以这种方法 不能直接实现。 必须依赖 其他技术 才能在 CCM 条件下运行。 此外,这种方法 也不适合 LLC 和 有源钳位反激式拓扑 等拓扑结构,虽然电路 仍然实现了伏秒平衡, 但电流 过零点 不是伏秒 平衡点, 因此将无法 控制 SR。 VDS 检测方法更大程度上 是一种通用的控制方法, 因此我们将花更多的时间 介绍这种控制方法。 在我们弄清楚 控制方法之后, 接下来需要回答的 一个问题是,应该选择 哪一种 SR? SR 的额定电压 很简单。 这是由拓扑决定的。 所以,我们在 选择 SR 额定电压时 实际上并没有太多自由度。 但是可以 自由选择 FET 的大小以及 需要多低的 RDS(ON)。 通过前面的分析 可以知道,使用 SR 的 全部目的就是 试图减少传导损耗。 所以我们应该选择 尽可能低的 RDS(ON)。 但是,如果看一下 VDS 检测的控制方法, 我们就知道 当这个电流达到 V TH_OFF 时 表示正在关闭 SR。 关断电流实际上 等于 V TH_OFF 除以 RDS(ON)。 RDS(ON) 较低时 比 RDS(ON) 较高时 关闭 SR 的时间要早得多。 一旦 SR 关闭, 其余电流 都将流过 体二极管。 因此,即使选择 较低的 RDS(ON) 之后, 当 FET 导通时, 传导损耗 会低得多, 但由于 SR 的关闭时间 会早得多, 最终可能会产生 更高的传导损耗。 所以,必须注意 关断阈值的 负面影响。 所以,选择的 RDS(ON) 不能太小, 否则,可能得不到 想要的结果。 除了传导损耗, 我们还 必须注意 开关损耗。 整体 SR 损耗包括 传导损耗、开关损耗 和驱动器损耗。 传导损耗 取决于 RDS(ON),但前提是 能够完美控制 SR。 但是,开关损耗 和驱动器损耗 都与寄生电容 成正比。 我们都知道更低的 RDS(ON) 意味着更高的电容。 较低的传导损耗 通常会带来 较高的开关损耗。 这里显示了两条曲线,根据设计, 一条使用较低的 RDS(ON), 另一条使用较高的 RDS(ON), 我们可以看到在不同负载下 能够实现的效率。 所以可以看到, 如果使用更低的 RDS(ON), 可能可以在更重的 负载下实现更高的 效率。 但是,由于更高的 开关损耗, 在更轻的负载下 将出现更低的效率。 另一方面,如果 选择更高的 RDS(ON), 重负载的效率可能会更低, 但在更轻的负载下, 效率可能会更高。 因此,为 SR 选择合适的 RDS(ON) 实际上是一种 权衡利弊的过程。 还有一点必须注意, 根据效率标准的要求, 必须以四点平均值的方式 进行效率计算。 因此,轻载效率 与重载效率 同样重要。 而且,一些 效率标准 还需要 10% 的效率 才能达到一定的水平。 SR 面临的 挑战之一 是如何处理 连续传导负载。 在不同的拓扑中,比如 在反激式、正激式和 LLC 拓扑中, 经常会在 CCM 条件下运行, 在这种情况下, 电流将进入连续传导。 对于 LLC, 当开关频率 高于谐振频率的 时候,我们将 在初级侧开关 关闭后看到非常高的 di/dt 点位。 所以,这种情况下 我们也可以看到 这类似于 CCM 运行模式。 在所有这些 运行情况下 都将看到控制器必须 处理这个高 di/dt。 因此 SR 控制器必须 能够极其快速地响应。 让我们来看看这个 di/dt 的 更多细节。 对于反激式转换器, 在开始时的 次级侧 导通期间, 可以看到 di/dt 由 输出电压和 磁化电感决定。 一旦初级侧 接通,初级侧 和次级侧都将 导通,而电流 开始减小。 这个电流减小斜率 di/dt 实际上 由输入电压和 输出电压所共同决定, 而这些电压 是在漏电感上提供的。 由于电压高得多 且电感低得多, 因此这个 di/dt 将远高于这里的 di/dt。 此外,SR 控制器 应该能够 正好在过零点处 关闭 SR。 如果 SR 控制器的 响应速度不够快, 那么可能会延迟关闭。 这种情况将 产生负电流, 进而造成实际损耗。 而且有可能会 引入电压应力。 所以,比较器需要 非常快速地响应 以便最大限度减小 负电流。 这些情况提醒了我们 二极管反向恢复问题。 所以在这里,我将展示一种 典型的二极管反向恢复情况。 这是二极管的压降。 我们可以看到, 在二极管电流过零后, 它也不会关闭,一直到 TR 的 TA 时间到期为止。 这意味着,这相当于 SR 关闭延迟。 从这个表中 可以看出 反向恢复 越糟糕, 在进入 CCM 条件后产生的 开关损耗就越大。 这就说明了 在 CCM 条件下 运行时具备能够 响应高 di/dt 的 SR 控制器 有多么重要。 一旦了解这一情况后, 可能就会产生疑问, 为什么我不早点 关闭 SR, 这样我就不会延迟关闭了? 我们必须考虑两种情况。 如果过早 关闭 SR, 那么将会发生的情况就是, 电流最初是 流经 SR 通道的, 当源极关闭 SR 时, 电流将会 开始流向 体二极管。 因此,即使不处理 SR 关闭问题, 也要处理体二极管 反向恢复 问题。 另一方面,如果 太迟关闭 SR, 那么完全 不必处理 体二极管,但是 要处理 SR 关闭延迟问题。 因此,作为底线, 我们希望 击穿时间或 SR 关闭延迟时间 应该短于 体二极管 反向恢复时间, 对于 TA 部分, 我们希望短于 这个时间,这样就 不会比体二极管的行为更差。 另一件事情就是, 必须注意 二极管模式期间的 CCM 运行情况, 例如, 在启动期间 或过载条件下, 控制器可能 完全掉电。 在这种情况下,SR 必须 安然度过它的体二极管 反向恢复时间。 此外,如果能够访问 主开关的开启信号, 这也可能对时间控制 有所帮助, 因为这样可以 在正确的时间关闭 SR。 例如,使用 同步整流器降压转换器。 在同步降压转换器中, 可以在正确的时间 关闭 SR,从而最大限度 减小反向恢复时间。 SR 的其他 挑战包括 应对寄生振铃 或噪声。 对于反激式转换器, 如果在 DCM 模式下运行, 通常会观察到两次振铃。 第一次振铃 是 SR 开启后的 泄漏复位振铃。 在 SR 开启后, 泄漏复位, 此时将出现 大量噪声。 如果对这种情况 不采取应对措施, SR 可能会 立即关闭。 在 DCM 部分, 开关节点电容器 将与磁化电感器 一起共振。 这样将会产生 大型振铃, 并且这可能会低于地电平。 这样会开启体二极管, 并且 SR 有可能会 在错误的时间开启。 所以,还需要一些方法 处理 DCM 振铃问题。 我们经常使用 消隐时间 来避免强制关闭 或强制开启。 一旦在 LLC 转换器中运行, 消隐时间有时 会变得很方便。 我们在前面讨论过, LLC 转换器的电流形状 是正弦曲线。 如果观察电流形状, 可以发现, 导通开始时和结束时的 电流都非常小。 因此 SR 控制器 实际上无法分辨 这一点的小电流或 这一点的小电流。 所以可以开启 SR 并立即关闭。 为了避免 导通时间过短, 我们通常设置一个 最短导通时间, 使 SR 电流 稍微增大一点, 这样可以长时间 保持导通。 因此可以 在正确的时间关闭 SR。 最短导通时间 在 LLC 条件下也有帮助。 当我们使用 V DS 检测 来控制 SR 时, 需要注意的另一件事 是寄生电感器的影响。 当我们 检测到 V DS 时, 实际上检测到的 电压是该通道上的 SR 电压与 寄生电感电压的 组合。 虽然可以 通过优化布局 来最大限度减少 寄生电感,但封装电感 始终存在。 因此,检测到的 整体电压 是 RDS(ON) 电压 和 L di/dt 电压。 以 LLC 电流 为例, 可以看到, 在上升沿期间, 当电流增加时, 因为 di/dt 为正, 控制器看到的电流 比预期的要多。 另一方面, 在负斜率期间, 电流下降时, di/dt 为负, 因此,控制器 看到的电流 小于实际电流。 因此,控制器可能会 过早关闭 SR。 然后在 SR 关闭后, 其余电流 流过体二极管 并产生较大的传导损耗。 为了避免这种情况, 首先要做的 就是选择具有 低封装电感的器件, 以便最大限度 缩短这个时间, 使这些关断点 尽可能靠近末端。 我们在控制器 UCC24612 和 UCC24624 中 实现的另一种技术, 就是使用所谓的 比例栅极驱动器。 比例栅极驱动器的 理念在于, 尽可能降低 栅极电压。 我们不需要 完全开启 SR, 而是将其设置为 低压固定正向压降。 在这段时间内, 即使增加传导损耗, 但由于电流很小, 因此传导损耗的 增加量处于 最低限度。 但是,这种做法可以带来 额外的好处。 首先,我们 将它关闭后, 电压电平将接近 MOSFET 阈值电压。 因此,如果 进入 CCM 运行模式, 延迟将会缩短。 而且,因为我们会 产生更高的压降, 所以即使仍然远低于 二极管的整个压降, 但是,它对 寄生电感器将不会 那么敏感。 所以可以大幅减小 关闭位置与 零交叉点之间的距离。 这里有几个例子。 这个 PMP 设计和 28780EVM 两个都使用 24612 在 LLC 和有源钳位 反激式转换器上 实现高效率。 我们可以把 同步整流器 放置在不同位置。 观察这里的 这个波形可以看到, 我用二极管 简化了整流器。 因此可以看到, 我可以在正通路上放一个二极管, 或者我也可以在负通路上 放一个二极管。 它们都可以 整流输出电压。 将二极管放在 不同位置 有不同的结果。 如果我们 将 SR 放在高侧, 当然它更难驱动, 因为源极在这里, 输出接地在这里, 所以,更难 驱动 SR。 可能需要进行电平转换, 或者需要高侧偏置。 但是可以带来更好 或更低的 EMI。 我们之前讲过这里, 如果观察所有的红色箭头, 可以看到这些是 共模电流。 两个开关节点: 这里和这里。 这里的开关节点 是初级侧开关节点, 开关节点波形 看起来是这样的。 如果我们看一下 这里的上升沿, 一旦开关节点升起, 当关闭开关时, 开关节点将上升。 同时,次级侧 开关节点 也将上升, 试图开启整流器。 在此期间, 因为这个上升沿 会迫使电流 从初级侧通过 C2 流向次级侧, 而这个上升沿 会迫使电流 通过 C1 从次级侧 流向初级侧, 所以,这两个电流 实际上可以相互抵消 并有助于改善 EMI。 另一方面, 可以将整流器 放在底部。 低侧 SR 可以 带来一些好处, 即以输出接地为基准, 便于驱动。 而且可以 轻松偏置 IC。 但是,如果查看 开关节点和 共模噪声, 当初级侧关闭时, 开关节点上升, 次级侧开关节点 实际上会下降 以便让整流器导通。 然后会有更多电流 流过 C2, 而没有电流 流过 C1。 所以抵消 效应没有了。 最终将产生 更多的 EMI 噪声。 在实现同步 整流器之后, 必须注意偏置、 驱动和 EMI 噪声。 总结一下,SR MOSFET 相对于二极管 提供更低的 导通压降和传导损耗。 SR 可能并非总是合理的选择。 具体要取决于 输出电压和输出电流 以及功率级别。 注意低 RDS(ON) 和 高 C OSS 之间的权衡。 注意 RDS(ON) 变得过低 对于 V DS 检测控制 所带来的影响。 注意过早关闭和 体二极管反向恢复。 实际上,这可能 比短 CCM 击穿更糟糕。 另外,请注意 低侧整流的 EMI 影响。 这里有一些 阅读材料 有助于进一步 理解本次演示的 内容。 本次演示就到这里。 感谢您的关注。 570
大家好!
欢迎观看本次演示。
我叫 Bing Lu。
今天我要介绍的是 同步整流什么时候可以
提高效率?
本次演示是由我和 Bernard Keogh 准备的。
这次培训将介绍 什么内容?
本次演示的 目的是
尝试解释 SR 的工作原理, 说明它们何时有效,
展示针对它们的 各种控制方法,
指出一些需要注意的缺点, 并提供一些设计
示例。
本次演示中 将会提及的
器件型号包括 UCC24612、UCC24610、
UCC24630 和 UCC24624。
相关参考设计 包括台式机电源、
工业电源、 电视机电源
以及 USB PD 适配器。
因此,本主题将 与不同的应用相关,
尤其会介绍 需要高效率
和更出色的 热管理性能的
隔离式电源。
首先,我们将讨论 同步整流。
如何工作?
通常,我们使用二极管 作为整流方法。
它很简单。
它会自动 开启和关闭。
但是,我们可以用 MOSFET 代替二极管,
使体二极管的方向 与二极管整流器
相同。
因此,如果我们使用 N 沟道增强型 MOSFET
作为开关器件, 当我们关闭栅极时,
将看到通道关闭。
这样,电流仍然会 流经体二极管,
就像存在 二极管整流器一样。
但是,当开启 MOSFET 时,
MOSFET 会成为 带有双向
连接通道的 传导通路,
因此可以把来自 体二极管的电流引导至
通道中。
如果我们可以 控制 MOSFET 栅极,
将栅极导通为高电平, 就能使电流流经体二极管。
所以,当电流应该 流经体二极管时,
我们可以开启 SR 栅极。
而通道中的电流 应该衰减到零时,
我们可以关闭 SR 栅极。
因此,MOSFET 与 二极管同步工作,
从而实现所谓的 同步整流。
为什么我们要使用 同步整流?
简单来说就是为了获得 更好的效率和高功率
密度。
需要高效率 有几个原因。
其中之一是 达到效率标准。
DoE 和 CoC 都要求 外部适配器
具有高效率, 因此
必须满足 效率标准
才能销售产品。
其他标准, 比如 80 Plus,
也定义了 台式机电源的
效率要求。
需要高效率的 另一个原因
是提高功率密度。
例如,一些旅行适配器 就有这种需求。
通常希望适配器 尽可能小,
这样会 更方便携带。
而对于其他用途, 例如 DIN 轨电源,
通常希望它们 具有更小的尺寸,
这样在同一机架中 可以安装更多的电源
并提供更高的 功率处理能力。
另一个原因是 为了解决热问题
并提高可靠性。
由于 SR 能够 降低传导损耗,
提高效率, 并降低总体内部功率
损耗,
因此我们可以降低 运行成本,
还可以减少 需要消散的热量,
进而能够降低 热管理成本,
消除二极管 整流器热点,
提高稳定性、可靠性 和使用寿命。
现在,让我们看看 二极管整流器损耗。
二极管整流器中 有多少损耗?
这里有一个简单的例子, 反激式转换器。
在反激式转换器中 可以看到
输出电流全部 流经输出
整流器二极管。
出现这种情况的 原因是输出电容器
不接受直流电流。
所以,所有的直流电流 都流经二极管。
不仅仅只有反激式拓扑 存在这种情况,
分析整流器二极管时 会发现许多
其他拓扑也会 出现这种情况。
如果要计算 二极管的损耗,
可以简单地将 二极管正向压降
建模为固定值, 即 V f,然后乘以
输出电压。
因此,功率与 输出电流
以及正向压降成正比。
也就是说, 较低的正向压降
在二极管上会产生 较少的传导损耗。
如果假设电路的 其余部分
具有 100% 的效率, 那么可以轻松
计算出二极管整流器效率, 即输出电压
除以输出电压 加正向压降,
然后将其绘制在 此曲线中,
此处假设 正向压降
为 0.5 伏。
在这条曲线中 可以清楚地看到,
输出电压 较低时效率会
变差。
出现这种情况的 原因是正向压降
成为了输出电压的 较大部分。
所以,当输出电压较低时, 整流器很有意义。
而当输出电压较低时, 整流器的作用
就越来越小。
假设现在有 1000 伏的输出电压,
使用同步整流器 是否有意义呢?
也许没有。
使用同步整流器 可以减少多少
损耗呢?
这里是肖特基二极管 和同步整流器
之间的直接比较 情况。
肖特基二极管,就是这一个 25 安培 60 伏特的肖特基二极管。
在 10 安培时, 该器件的正向压降
为 0.37 伏特。
我们可以把正向压降 作为正向电流的函数
绘制在这条红色曲线中, 这里的温度
是 125 摄氏度。
同时,我们找到 一个同步整流器,
这个器件具有相同的 额定电压 60 伏特。
另外,这个器件 在 125 摄氏度时的
RDS(ON) 为 15.3 毫欧。 我们同样可以
绘制另一条曲线, 表示同步整流器
在不同正向电流下的正向压降。
在这条曲线上可以 看到 10 安培时的相同数据。
这一条的 正向压降
大约为 320 毫伏。
但这一条只有 大约 150 毫伏。
因此可以 大幅减少正向压降,
这意味着 整流器损耗更小,
热应力更小。
具体有多少损耗, 我们可以
通过对传导损耗 进行建模以及
对电流进行建模来计算损耗, 此处以反激式转换器为例。
对于这个特定的 肖特基二极管,
我们可以使用 固定电阻和固定压降
来逐步和线性地 对其正向压降进行建模。
同时,我们可以通过 RDS(ON) 对同步整流器的
正向压降进行建模。
与此同时,使用反激式 转换器次级侧电流,
在此处的显示结果 很像平均电流等于
输出电流的三角波形, 假设占空比为 50%,
那么可以计算出 均方根电流为这个数字,
而平均值为 这个数字。
因此,我们可以把损耗模型 应用于这个电流波形。
我们可以计算 二极管损耗和 SR 损耗。
从这条曲线可以 清楚地看到,
从二极管更改为 SR 可以节省 50% 以上的
传导损耗。同样的计算方法 也可以运用于
其他拓扑,比如 LLC。
然而,LLC 转换器 比反激式转换器
稍显复杂,因为电流 现在是三角形。
这里还有一个 例子,我展示的是
UCC24624,这是一个 SR 控制器,用于驱动
LLC 转换器的两个 SR。
在这个例子中, 我们可以把次级侧电流近似为
经过整流的正弦电流。
这里的平均电流 等于输出电流。
每个 SR 以正弦方式
承载一半的电流。
因此,我们将看到 流过 S1 的平均电流
和流过 S2 的 平均电流
等于输出电流的 一半。
此外可以基于 正弦形状来计算
它们的均方根电流。
虽然 LLC 电流不是 严格的正弦电流,
但正弦形状可以给我们 提供非常好的均方根电流
近似计算方法。
获得均方根电流 和平均电流后,
就可以回到 损耗模型,
并计算 SR 的 传导损耗。
在我们了解 SR 的 工作原理之后,
现在我们应该提出的 一个重要问题是,
我们要如何控制 这个 SR?
首先,有一些拓扑 非常简单。
它们无需任何 专用控制器 IC 就可以
实现 SR 控制。
这里有一个例子。
这个 PMP8740 会使用 UCC28950
这种相移全桥 控制器
来同时控制 初级侧控制器开关
和次级侧 SR。
SR 的控制信号 来自初级侧
控制器。
其他一些拓扑, 比如同步降压拓扑
或有源钳位正激式拓扑, 可以采用相同的控制方法。
例如,在同步降压 拓扑中,
对同步 整流器的
控制与控制开关 是互补的。
所以只需 设计和估算
这段时间来防止 两个开关之间发生
击穿。
我们可以控制 同步整流器。
在有源钳位 正激式转换器上,
甚至可以使用 自驱动方法,
即变压器 两端的电压
可用于直接驱动 同步整流器
并实现控制。
不过,还有 其他一些拓扑,
比如反激式、有源钳位 反激式或 LLC 等拓扑,
由于上述复杂性, 确实需要专用的
SR 控制器。
有一种 SR 控制方法 基于 V DS 检测。
我们在 UCC24610 中实现了这一点。
这种控制方法 基于对 SR 漏源极
之间电压降的 观察。
下面我们举例说明。
在体二极管导通之前, SR 电压处于高位。
当电流开始 流经体二极管时,
SR 两端的电压降就是 这个体二极管的压降。
如果我们能设置 一个阈值 V TH_ON,
一旦 V TH_ON 两端 存在电压,我们便知道
电流正在流经体二极管, 我们就可以开启 SR 了。
一旦 SR 开启, 这个通道就会
变成一个电阻器, 这样就能
用来检测 流经 SR 的电流。
当电压降 非常接近于 0 时,
我们知道电流 也接近于 0,
我们可以设置 另一个阈值 V TH_OFF
来关闭 SR。
因此,可以 实现两个比较器
来控制 SR 的 开启和关闭。
这种控制方法 对拓扑没有限制。
但是,必须设计 这些比较器,
使它们能检测 非常高的电压,
而且还能检测 非常接近 0 的电压,
因为我们希望 这里的电流达到 0
并随后关闭 SR。当电压 非常接近 0 以后,
就必须处理 噪声、比较器
精度,等等。
我们无需设计 非常精确的
比较器以及使用 过去实现的其他方法,
而是采用伏秒平衡技术, 比如 UCC24630。
这款控制器利用了 DCM 反激式拓扑中的
伏秒平衡特性。
在 DCM 反激式拓扑中的 每个开关周期内
都会实现伏秒平衡, 如此图中所示,
在每个开关周期中, 变压器的
励磁电流从 0 变为最大值,
然后在每个开关周期中 再从最大值复位为 0。
这告诉我们, 当电流
达到 0 时, 正伏秒等于
负伏秒。
因此我们可以使用 这一特性来控制 SR 的关闭。
因为这个电路基本上 就是一个积分器,
所以对噪声的敏感度 要低得多。
但是,只有在 DCM 运行期间 才能实现伏秒平衡,
使用 CCM 时, 虽然在稳态
运行期间 是平衡的,
但在过渡期间 不能实现伏秒平衡。
所以这种方法 不能直接实现。
必须依赖 其他技术
才能在 CCM 条件下运行。
此外,这种方法 也不适合 LLC 和
有源钳位反激式拓扑 等拓扑结构,虽然电路
仍然实现了伏秒平衡,
但电流 过零点
不是伏秒 平衡点,
因此将无法 控制 SR。
VDS 检测方法更大程度上 是一种通用的控制方法,
因此我们将花更多的时间 介绍这种控制方法。
在我们弄清楚 控制方法之后,
接下来需要回答的 一个问题是,应该选择
哪一种 SR?
SR 的额定电压 很简单。
这是由拓扑决定的。
所以,我们在 选择 SR 额定电压时
实际上并没有太多自由度。
但是可以 自由选择
FET 的大小以及 需要多低的 RDS(ON)。
通过前面的分析 可以知道,使用 SR 的
全部目的就是 试图减少传导损耗。
所以我们应该选择 尽可能低的 RDS(ON)。
但是,如果看一下 VDS 检测的控制方法,
我们就知道 当这个电流达到 V TH_OFF 时
表示正在关闭 SR。
关断电流实际上 等于 V TH_OFF
除以 RDS(ON)。
RDS(ON) 较低时 比 RDS(ON) 较高时
关闭 SR 的时间要早得多。
一旦 SR 关闭, 其余电流
都将流过 体二极管。
因此,即使选择 较低的 RDS(ON) 之后,
当 FET 导通时, 传导损耗
会低得多,
但由于 SR 的关闭时间 会早得多,
最终可能会产生 更高的传导损耗。
所以,必须注意 关断阈值的
负面影响。
所以,选择的 RDS(ON) 不能太小,
否则,可能得不到 想要的结果。
除了传导损耗, 我们还
必须注意 开关损耗。
整体 SR 损耗包括 传导损耗、开关损耗
和驱动器损耗。
传导损耗 取决于
RDS(ON),但前提是 能够完美控制 SR。
但是,开关损耗 和驱动器损耗
都与寄生电容 成正比。
我们都知道更低的 RDS(ON) 意味着更高的电容。
较低的传导损耗 通常会带来
较高的开关损耗。
这里显示了两条曲线,根据设计, 一条使用较低的 RDS(ON),
另一条使用较高的 RDS(ON), 我们可以看到在不同负载下
能够实现的效率。
所以可以看到, 如果使用更低的 RDS(ON),
可能可以在更重的 负载下实现更高的
效率。
但是,由于更高的 开关损耗,
在更轻的负载下 将出现更低的效率。
另一方面,如果 选择更高的 RDS(ON),
重负载的效率可能会更低, 但在更轻的负载下,
效率可能会更高。
因此,为 SR 选择合适的 RDS(ON) 实际上是一种
权衡利弊的过程。
还有一点必须注意, 根据效率标准的要求,
必须以四点平均值的方式 进行效率计算。
因此,轻载效率 与重载效率
同样重要。
而且,一些 效率标准
还需要 10% 的效率 才能达到一定的水平。
SR 面临的 挑战之一
是如何处理 连续传导负载。
在不同的拓扑中,比如 在反激式、正激式和 LLC 拓扑中,
经常会在 CCM 条件下运行,
在这种情况下, 电流将进入连续传导。
对于 LLC, 当开关频率
高于谐振频率的 时候,我们将
在初级侧开关 关闭后看到非常高的
di/dt 点位。
所以,这种情况下 我们也可以看到
这类似于 CCM 运行模式。
在所有这些 运行情况下
都将看到控制器必须 处理这个高 di/dt。
因此 SR 控制器必须 能够极其快速地响应。
让我们来看看这个 di/dt 的 更多细节。
对于反激式转换器, 在开始时的
次级侧 导通期间,
可以看到 di/dt 由
输出电压和 磁化电感决定。
一旦初级侧 接通,初级侧
和次级侧都将 导通,而电流
开始减小。
这个电流减小斜率 di/dt 实际上
由输入电压和 输出电压所共同决定,
而这些电压 是在漏电感上提供的。
由于电压高得多 且电感低得多,
因此这个 di/dt 将远高于这里的 di/dt。
此外,SR 控制器 应该能够
正好在过零点处 关闭 SR。
如果 SR 控制器的 响应速度不够快,
那么可能会延迟关闭。
这种情况将 产生负电流,
进而造成实际损耗。
而且有可能会 引入电压应力。
所以,比较器需要 非常快速地响应
以便最大限度减小 负电流。
这些情况提醒了我们 二极管反向恢复问题。
所以在这里,我将展示一种 典型的二极管反向恢复情况。
这是二极管的压降。
我们可以看到, 在二极管电流过零后,
它也不会关闭,一直到 TR 的 TA 时间到期为止。
这意味着,这相当于 SR 关闭延迟。
从这个表中 可以看出
反向恢复 越糟糕,
在进入 CCM 条件后产生的
开关损耗就越大。
这就说明了 在 CCM 条件下
运行时具备能够 响应高 di/dt 的
SR 控制器 有多么重要。
一旦了解这一情况后, 可能就会产生疑问,
为什么我不早点 关闭 SR,
这样我就不会延迟关闭了?
我们必须考虑两种情况。
如果过早 关闭 SR,
那么将会发生的情况就是, 电流最初是
流经 SR 通道的,
当源极关闭 SR 时, 电流将会
开始流向 体二极管。
因此,即使不处理 SR 关闭问题,
也要处理体二极管 反向恢复
问题。
另一方面,如果 太迟关闭 SR,
那么完全 不必处理
体二极管,但是 要处理 SR
关闭延迟问题。
因此,作为底线, 我们希望
击穿时间或 SR 关闭延迟时间
应该短于 体二极管
反向恢复时间, 对于 TA 部分,
我们希望短于 这个时间,这样就
不会比体二极管的行为更差。
另一件事情就是, 必须注意
二极管模式期间的 CCM 运行情况,
例如, 在启动期间
或过载条件下, 控制器可能
完全掉电。
在这种情况下,SR 必须 安然度过它的体二极管
反向恢复时间。
此外,如果能够访问 主开关的开启信号,
这也可能对时间控制 有所帮助,
因为这样可以 在正确的时间关闭 SR。
例如,使用 同步整流器降压转换器。
在同步降压转换器中, 可以在正确的时间
关闭 SR,从而最大限度 减小反向恢复时间。
SR 的其他 挑战包括
应对寄生振铃 或噪声。
对于反激式转换器, 如果在 DCM 模式下运行,
通常会观察到两次振铃。
第一次振铃 是 SR 开启后的
泄漏复位振铃。
在 SR 开启后, 泄漏复位,
此时将出现 大量噪声。
如果对这种情况 不采取应对措施,
SR 可能会 立即关闭。
在 DCM 部分, 开关节点电容器
将与磁化电感器 一起共振。
这样将会产生 大型振铃,
并且这可能会低于地电平。
这样会开启体二极管, 并且 SR 有可能会
在错误的时间开启。
所以,还需要一些方法 处理 DCM 振铃问题。
我们经常使用 消隐时间
来避免强制关闭 或强制开启。
一旦在 LLC 转换器中运行,
消隐时间有时 会变得很方便。
我们在前面讨论过, LLC 转换器的电流形状
是正弦曲线。
如果观察电流形状, 可以发现,
导通开始时和结束时的 电流都非常小。
因此 SR 控制器 实际上无法分辨
这一点的小电流或 这一点的小电流。
所以可以开启 SR 并立即关闭。
为了避免 导通时间过短,
我们通常设置一个 最短导通时间,
使 SR 电流 稍微增大一点,
这样可以长时间 保持导通。
因此可以 在正确的时间关闭 SR。
最短导通时间 在 LLC 条件下也有帮助。
当我们使用 V DS 检测 来控制 SR 时,
需要注意的另一件事 是寄生电感器的影响。
当我们 检测到 V DS 时,
实际上检测到的 电压是该通道上的
SR 电压与 寄生电感电压的
组合。
虽然可以 通过优化布局
来最大限度减少 寄生电感,但封装电感
始终存在。
因此,检测到的 整体电压
是 RDS(ON) 电压 和 L di/dt 电压。
以 LLC 电流 为例,
可以看到, 在上升沿期间,
当电流增加时, 因为 di/dt 为正,
控制器看到的电流 比预期的要多。
另一方面, 在负斜率期间,
电流下降时, di/dt 为负,
因此,控制器 看到的电流
小于实际电流。
因此,控制器可能会 过早关闭 SR。
然后在 SR 关闭后, 其余电流
流过体二极管 并产生较大的传导损耗。
为了避免这种情况, 首先要做的
就是选择具有 低封装电感的器件,
以便最大限度 缩短这个时间,
使这些关断点 尽可能靠近末端。
我们在控制器 UCC24612 和 UCC24624 中
实现的另一种技术,
就是使用所谓的 比例栅极驱动器。
比例栅极驱动器的 理念在于,
尽可能降低 栅极电压。
我们不需要 完全开启 SR,
而是将其设置为 低压固定正向压降。
在这段时间内, 即使增加传导损耗,
但由于电流很小, 因此传导损耗的
增加量处于 最低限度。
但是,这种做法可以带来 额外的好处。
首先,我们 将它关闭后,
电压电平将接近 MOSFET 阈值电压。
因此,如果 进入 CCM 运行模式,
延迟将会缩短。
而且,因为我们会 产生更高的压降,
所以即使仍然远低于 二极管的整个压降,
但是,它对 寄生电感器将不会
那么敏感。
所以可以大幅减小 关闭位置与
零交叉点之间的距离。
这里有几个例子。
这个 PMP 设计和 28780EVM 两个都使用 24612
在 LLC 和有源钳位 反激式转换器上
实现高效率。
我们可以把 同步整流器
放置在不同位置。
观察这里的 这个波形可以看到,
我用二极管 简化了整流器。
因此可以看到, 我可以在正通路上放一个二极管,
或者我也可以在负通路上 放一个二极管。
它们都可以 整流输出电压。
将二极管放在 不同位置
有不同的结果。
如果我们 将 SR 放在高侧,
当然它更难驱动, 因为源极在这里,
输出接地在这里,
所以,更难 驱动 SR。
可能需要进行电平转换, 或者需要高侧偏置。
但是可以带来更好 或更低的 EMI。
我们之前讲过这里, 如果观察所有的红色箭头,
可以看到这些是 共模电流。
两个开关节点: 这里和这里。
这里的开关节点 是初级侧开关节点,
开关节点波形 看起来是这样的。
如果我们看一下 这里的上升沿,
一旦开关节点升起, 当关闭开关时,
开关节点将上升。
同时,次级侧 开关节点
也将上升, 试图开启整流器。
在此期间, 因为这个上升沿
会迫使电流 从初级侧通过 C2
流向次级侧,
而这个上升沿 会迫使电流
通过 C1 从次级侧 流向初级侧,
所以,这两个电流 实际上可以相互抵消
并有助于改善 EMI。
另一方面, 可以将整流器
放在底部。
低侧 SR 可以 带来一些好处,
即以输出接地为基准, 便于驱动。
而且可以 轻松偏置 IC。
但是,如果查看 开关节点和
共模噪声, 当初级侧关闭时,
开关节点上升, 次级侧开关节点
实际上会下降 以便让整流器导通。
然后会有更多电流 流过 C2,
而没有电流 流过 C1。
所以抵消 效应没有了。
最终将产生 更多的 EMI 噪声。
在实现同步 整流器之后,
必须注意偏置、 驱动和 EMI
噪声。
总结一下,SR MOSFET 相对于二极管
提供更低的 导通压降和传导损耗。
SR 可能并非总是合理的选择。
具体要取决于 输出电压和输出电流
以及功率级别。
注意低 RDS(ON) 和 高 C OSS 之间的权衡。
注意 RDS(ON) 变得过低 对于 V DS 检测控制
所带来的影响。
注意过早关闭和 体二极管反向恢复。
实际上,这可能 比短 CCM 击穿更糟糕。
另外,请注意 低侧整流的
EMI 影响。
这里有一些 阅读材料
有助于进一步 理解本次演示的
内容。
本次演示就到这里。
感谢您的关注。 570
手机看
扫码用手机观看
 视频简介
视频简介
什么时候可以同步整流提高效率?
所属课程:TI HVI系列培训
发布时间:2019.05.23
视频集数:26
本节视频时长:00:29:36
HVI为TI 美国本土每年一届的系统级电源设计研讨会。在这个研讨会中,TI的高级工程师们将和大家讨论常见的系统级电源设计中的各类问题,并介绍TI最新的创新电源解决方案。 会议讨论的主题涵盖从PFC到隔离式栅极驱动器,包括宽带隙解决方案以及电动汽车(EV)等应用主题。
本系列培训收录了20多个HVI研讨会上的讨论主题,您可以观看并从您感兴趣的主题中学习各种系统级电源设计的解决方案。从功率因数校正(PFC)的基本原理到设计多功率电源系统,请选择您最喜欢的主题,并开始学习吧。


 未学习 深度掌握隔离驱动器瞬态共模噪音抑制及其特性
未学习 深度掌握隔离驱动器瞬态共模噪音抑制及其特性
 未学习 熟练掌握高压MOSFET/IGBT栅极驱动设计
未学习 熟练掌握高压MOSFET/IGBT栅极驱动设计
 未学习 1.1 LLC控制:更快,更强,更好---第一部分
未学习 1.1 LLC控制:更快,更强,更好---第一部分
 未学习 1.2 LLC控制:更快,更强,更好---第二部分
未学习 1.2 LLC控制:更快,更强,更好---第二部分
 未学习 1.3 LLC控制:更快,更强,更好---第三部分
未学习 1.3 LLC控制:更快,更强,更好---第三部分
 未学习 1.4 LLC控制:更快,更强,更好---第四部分
未学习 1.4 LLC控制:更快,更强,更好---第四部分
 未学习 1.1为你的临界模式PFC提供超强动力 - 课程介绍
未学习 1.1为你的临界模式PFC提供超强动力 - 课程介绍
 未学习 1.2为你的临界模式PFC提供超强动力 - PFC以及CRM PFC工作原理
未学习 1.2为你的临界模式PFC提供超强动力 - PFC以及CRM PFC工作原理
 未学习 1.3为你的临界模式PFC提供超强动力 - UCC28056 CRMDCM控制芯片工作原理
未学习 1.3为你的临界模式PFC提供超强动力 - UCC28056 CRMDCM控制芯片工作原理
 未学习 1.4为你的临界模式PFC提供超强动力 - UCC28064 CRM控制芯片工作原理
未学习 1.4为你的临界模式PFC提供超强动力 - UCC28064 CRM控制芯片工作原理
 未学习 1.5为你的临界模式PFC提供超强动力 - 课程总结
未学习 1.5为你的临界模式PFC提供超强动力 - 课程总结
 未学习 设计超高功率密度的小功率AC-DC电源
未学习 设计超高功率密度的小功率AC-DC电源
 未学习 USB type C PD协议设计考量
未学习 USB type C PD协议设计考量
 未学习 如何驱动碳化硅MOSFET以优化高功率系统的性能和可靠性
未学习 如何驱动碳化硅MOSFET以优化高功率系统的性能和可靠性
 未学习 GaN产品应用于可靠和高密度电源的设计
未学习 GaN产品应用于可靠和高密度电源的设计
 未学习 门驱动器设计-从基础到细节
未学习 门驱动器设计-从基础到细节
 未学习 常见门驱动器问题及其解决方法
未学习 常见门驱动器问题及其解决方法
 未学习 高功率密度和高效率适配器的设计考虑-第1部分
未学习 高功率密度和高效率适配器的设计考虑-第1部分
 未学习 高功率密度和高效率适配器的设计考虑-第2部分
未学习 高功率密度和高效率适配器的设计考虑-第2部分
 未学习 解除有源钳反激回路补偿的神秘化
未学习 解除有源钳反激回路补偿的神秘化
 未学习 用GaN设计可靠的高密度功率解决方案-第一部分
未学习 用GaN设计可靠的高密度功率解决方案-第一部分
 未学习 用GaN设计可靠的高密度功率解决方案-第二部分
未学习 用GaN设计可靠的高密度功率解决方案-第二部分
 未学习 掌握高压门驱动器设计的艺术和基础
未学习 掌握高压门驱动器设计的艺术和基础
 未学习 掌握隔离门驱动器的稳健性——CMTI的深入研究
未学习 掌握隔离门驱动器的稳健性——CMTI的深入研究
 未学习 削减待机功耗和系统成本
未学习 削减待机功耗和系统成本
 未学习 什么时候可以同步整流提高效率?
未学习 什么时候可以同步整流提高效率?


























