解除有源钳反激回路补偿的神秘化
Loading the player...
将在30s后自动为您播放下一课程
大家好! 我叫 Pei-Hsin Liu。 我是一名 [听不清] 在线 高电压控制器助理 工程师。 本次演示的主题是 揭开有源钳位 反激式环路补偿的 神秘面纱。 本部分涵盖了针对 ACF 的转换模式 和 CCM 模式进行的 小信号属性分析。 第二,我们会介绍 ACF 的突发运行 模式的优势和 稳定性问题。 第三,我们将基于 分析模型和两种 可用于稳定突发 控制环路的 简单纹波补偿方法, 给出相关设计 准则。 适用的终端 设备包括 高密度交流 适配器或充电器、 USB 供电充电器以及 交流/直流或直流/直流 辅助电源。 本演示可分为 五个部分。 首先,我们将 讨论电流模式 控制的 ACF 的 小信号模型。 其次,我们将介绍作为 ACF 轻负载运行模式的 突发模式。 第三,我们将描述用于 稳定突发模式控制的 纹波补偿。 然后对带 π 输出 滤波器的 ACF 的串联 阻尼进行说明, 最后总结本节课 学习的内容。 这些幻灯片将会介绍 为什么有源钳位反激式 ACF 可提供 大大优于 传统准谐振 反激式 QR 的性能。 高速钳位电路 通过二极管 以及 [听不清] TVS 或 R-C 缓冲器 进行整流,[听不清], 广泛应用于我们的 反激式 [听不清] 中, [听不清]。 但是,却浪费了 [听不清] 能量。 并且这种功率 损耗会降低效率。 其次,在打开 [听不清] 开关的情况下, 如果您打开 [听不清], 则仍会出现开关 过热的情况。 PC 的第一个 分支 [听不清], 发生一定程度的开关损耗。 第三,在 [听不清] 停止后,[听不清] 和判断电容将产生 高摩擦 [听不清] 并影响 EMI。 而有源钳位 反激式 ACF 则是 由有源高侧 开关 Q 边缘构成, 可通过 [听不清] C 钳位来消除 这些不利因素, 尤其是打开 QH, 找到 [听不清] 电容器中的 驻留路径 [听不清], 从而使潜伏的能量 根据我们的状态循环流动到输出端。 如果 QH 保持开启 状态,可能不会 流过的电流 将变成第一反应。 在 Q_H 关闭后, 非激活部分 可用于通过停止 使该判断电容 在开关节点上进行放电。 打开 QL 后, 谐振到 0 伏。 在达到零伏时, 便实现了 ZVS。 此外,由于初级 电流是连续的 波形,所以没有 像基本钳位 那样的高频 [听不清], 这有利于 EMI 功能。 此图表总结了 不同功率水平下的 反激功率密度。 对于 15 瓦的手机充电器, 反激式上的 RHQ 状态 仅为每立方 英寸 9 瓦。 对于 45 瓦、 65 瓦和没有 适配器的情况,QR 反激式 已经达到了低于每立方英寸 11 瓦的功率密度限制。 为了满足大幅 减小体积的需求, 我们的团队开发了 ACF 支持构建 控制器。 一个是行业首创的 [听不清] 上频 ACF 控制器 UCC28780,一个是 全新 SR 控制器 UCC24612, 二者均可支持初级 增益和开关功率级, 并能够提供 1 兆赫的工作频率。 使用的参考 设计可确保 我们的解决 方案在 27 瓦的 USBCPD 手机充电器上 实现每立方英寸 91 瓦, 在手机适配器情况下则可 实现每立方英寸 31 瓦。 右图是在 65 千赫 区域内采用 QR 反激式 架构和在高于 200 千赫区域内采用 ACF 架构的 65 瓦适配器的 物理尺寸比较。 该设计表明, ACF 适配器的体积 显著减小,其峰值 效率可达 94%。 除了 65 瓦的 设计之外,我们 还需要对开关频率 高于 200 千赫的 45 瓦适配器 进行效率比较。 由于占主导 地位的开关 损耗和箝位损耗, 随着输入线路 电压的增加, 具有流畅增压 MOSFET 的 QR 反激式的 整体效率会变差。 而 ACF 却可以 在宽输入范围内保持 非常高的效率。 试验结果表明, ACF 的效率 比 QR 高 3.6%。 对于高强度考虑, [听不清] 器件 可以在宽输入范围内 实现高于 94% 的效率, 因为 GaN 器件采用的是 比硅器件中小得多的 判断电容。 ZVS 需要较小的 [听不清] 电流, 我们应该降低 峰值最小电流。 变压器的 [听不清] 和 [听不清] 损耗降低, 从而可实现更高的 效率,并导致 GaN 和硅器件之间 出现 1% 的效率差距。 这是 ACF 的主要 [听不清] 电流波形, 其中有一个部分是未激活的。 有争议的是, 这是 CCM 还是转换模式。 以下是我的个人看法。 从一个小的方面 来看,主要 [听不清] 电流的峰值 仅受峰值环路 控制。 但主要 [听不清] 电流不受 另一个 [听不清] 控制。 这个小信号属性 与 CCM 类似。 CCM 类模式的 裸电流大小的 确定方式为: 利用内部固定频率 时钟关闭 高置开关, 然后在相应 日期/时间之后 开始下一个开关周期。 大多数商用 ACF 控制器 都是基于这种运行模式, 包括 TS 传统 ACF 控制器 UCC289x。 另一方面,它具有 抵抗性内核控制, 包括峰值电流 环路和谷电流 环路。 所以,这个 小信号属性 与转换运行模式类似。 具体来说, 负主要 [听不清] 电流的大小 由谷值电流 环路独立调节。 这个开关 频率是可变的。 我们的全新控制器 UCC28780 是行业领先的 ACF 控制器,采用了 抵抗性内核控制的概念。 在下一张幻灯片中, 我会对 CCM 和转换 运行模式的小信号 特性进行比较。 这是基于 CCM 运行 模式的 UCC289x 的示意图。 上电压反馈环路的 控制电压 VCST 会控制峰值 主要 [听不清] 电流,所以电流感测 电阻器 RCS 在低侧 开关上。 对于反馈 环路补偿, 了解 VCST 到 上 40s 的传递函数 对补偿设计 有重要意义。 右侧显示了 CCM 运行 模式下的波德图。 您可以看到, 除了低频极点和 上电容器的 ESR 零点, 还有一个导致了 93 个相位的 延迟的右半平面零点。 开关频率的 中点处还有 一个双极点, 它引入了 另外 180 度的首次延迟。 这些强烈的首次延迟 将会对高容量设计 造成限制,因此, 为了满足负载传送需求, 需要使用 较大的上电容。 除此之外,为了减小 中点 [听不清] 频率 双极点,以防止 电流环路的 不稳定, 当占空比 大于 50% 时 需要进行 斜率补偿, 这使环路补偿进一步 复杂化。 这是基于 转换运行 模式的 UCC28780 的 示意图, 它包括峰值电流 环路和仿真谷值 电流环路。 峰值电流环路 控制从电流感测 电阻器 RCS 发送而来的 峰值主要 [听不清] 电流。 谷值电流 环路则通过 控制器中的自适应 ZVS 控件来控制 [听不清] 主要 [听不清] 电流。 该环路确定开关 节点电压 VSW 上的 ZVS 条件,以调整 高侧开关的导通时间 宽度。 小信号特性表明, 右平面零点和中点 [听不清] 开关频率 双极点消失了。 所以补偿设计 变得非常简单。 此外,消除 这些相位延迟 会导致具有足够相位 裕度的较高 [听不清] 设计。 最后,由于 当占空比 大于 50% 时, 电流环路没有 稳定性问题, 所以不需要 斜率补偿。 下一步需要 通过解析式的 模型表达式来指导 环路补偿。 然而,由于 次级侧上 ACF 开关电流 波形的相关性, 很难用解析 方法表征其 小信号特性。 我将向您展示 一种简单的典型建模 技术,它可以消除 谐振波形描述的 复杂性。 首先,可以合理地 将主要 [听不清] 电流 波形近似为 以深红色表示的 三角波形。 然后,低侧 开关上的开关 电流波形 I_QL 以蓝色表示, 包含主要 [听不清] 电流的中点信息。 这样,用一阶 公式来描述 I_QL 的 平均值就简单了许多, 如该公式所示。 其次,由于 I_QL 的实际值 也是 ACF 转换器的 平均输入电流, 因此可以根据 能量守恒定律 获得次级侧中 上电流的平均值。 然后,为了获得 小信号属性, 在转换器的 平衡点上 计算扰动 信号的偏导数。 最后,便可获得 小信号分析的等效 电路模型。 如您所见, 控制电压 V_CST 通过对电压 控制电流源 进行调幅 来调节上电压, 该电压会流经 上电容分支, 是电源转换器的 小信号 表示。 利用提出的模型, 可以导出 从 V_CST 到 上电压的传递函数的 解析表达式。 该表中总结了 这些参数。 右图比较了 传递函数和 简化比率 结果的波德图。 该模型提供了 高达开关频率的 四分之一的 非常精确的结果, 足以指导 环路补偿, 并验证了转换运行 模式下的 ACF 的 小信号属性。 现在,我们来看一下 ACF 中作为轻负载 运行模式的突发模式。 随着输出负载减小, 负最小电流 i_m- 保持不变, 正峰值电流 i_m+ 变小。 正峰值电流用于 向输出端传递 有源能量, 而负电流 则存储单独的能量 以实现 ZVS。 即随着负载变小, 正峰值电流和 负电流的幅度 越来越接近。 这意味着, 由于循环 能量的贡献 越来越大, 变压器效率 越来越差。 对于光滑的 ACF, 由于即将出现的电容, 高线处的裸电流较大。 随着输出 负载减小, 负电流影响 变得更加显著, 因此与扫描 ACF 相比, 效率会非常 迅速地恶化。 对硅 ACF 的 测量结果表明, 50% 负载 和 25% 负载的 效率差可达 7.3%。 而对于 GaN ACF, 由于它的低结电容, 负电流要比硅 ACF 小得多。 并且负载变得更小, 负电流影响 更小。 您可以看到, 50% 负载和 25% 负载 之间的效率差异仅为 2.6%。 ACF 理想轻载模式的 最关键要求是 将正峰值电流 保持在相对于 负电流来说 较高的水平。 UCC28780 采用突发模式 控制来提高轻载 效率。 正峰值电流 由 [听不清] 编程, 以克服最小电流 对效率的影响。 在本示例中, 每个突发数据包 有四个开关极点。 突发时间 随上载条件变化。 左侧显示了 控制低点。 当循环利用 该环路时, 峰值电流 会越来越低, 最终达到 可编程的阈值 并进入突发模式。 在这种情况下,由于突发 开始于非常轻的负载, 效率会下降太多。 为了提高效率, 通过电阻 分压器的较高 [听不清] 电压 会设置较高的峰值端 阈值,因此转换器 在较重的负载条件下 进入突发模式。 这样便可以显著 提高轻负载效率。 这张幻灯片 显示了用 UCC28780 控制的 45 瓦 GaN ACF 设计的效率测试结果。 当 ACF 在低于 60% 负荷下 进入突发模式后, 效率下降 趋于平缓, 平均效率显著 高于 COC 和 理论标准。 这张幻灯片说明了 基本突发模式控制的 控制环路设计。 将来自上电压 反馈环路的反馈 信号 I_FB 与阈值 I_REF 进行比较,以确定 突发数据包的开始。 计数器会 确定突发 数据包结束时 突发模式下的 开关周期的数量。 逻辑 [听不清] 信号 会反映计时的突发。 当两个信号相交时, RUN 处于高位, 这允许有限数量的 开关脉冲, 因为仿真 结果表明 纹波和反馈 信号 I_FB 参与上电压调节, 所以纹波质量会影响 突发模式控制。 下面的幻灯片 将介绍用于 稳定突发模式 控制的波纹 补偿技术。 由于反馈信号 I_FB 的纹波成分 会影响控制低位, 因此反馈信号 与上电压信号 之间的突发 频率纹波的 脉冲延迟必须 尽可能小, 以便反馈信号 反映上电压的 实时纹波成分。 否则,您将看到 一个现象,即每两个 突发周期, 两组突发数据包 便会出现在一起, 且具有非常短和非常 长的突发时间, 并且可能产生最佳 噪声频率。 为了解决这个问题, 需要通过适当的 补偿来将反馈环路中的 突发延迟最小化。 左图显示了 初级侧和次级侧 之间的反馈 环路电路。 次级侧由 [听不清] 并联稳压器 ATO、旁路 稳压器 R_BIAS1 以及 与 R_BIAS1、Rdiff 和 Cdiff 并联的 RC 网络组成。 它们将上电压 信号转换为流经 光耦合器输入 [听不清] 的误差 电流信号。 光耦合器通过 误差电流信号 输出到主控制器 以进行上电压调节。 在这个信号链中, 光耦合器的 [听不清] 和输出会引入 低频相位延迟, 该延迟在 [听不清] 突发域中表示为 单个极点。 为了克服光耦合器的 相位延迟, 转换器上的单个零点 被放置在靠近 极点的位置,希望通过 电路图中的 Rdiff 和 Cdiff 实现该目的。 在正确设计 推荐的无源纹波 补偿后, 在使用电解 上电容器时, 可在突发数据包中 使用稳定的 开关 [听不清] 来稳定突发 控制环路。 电解电容器包含 较大的等效串联 电阻 ESR。 但是聚合物或陶瓷 电容器的 ESR 要低得多。 较小的 ESR 可减小上电压纹波。 但是,它会给 依赖于良好纹波 质量的突发 运行模式带来 不利影响。 最后,即使补偿 设计是正确的,也可能 由于 [听不清] 噪声造成突发 运行模式仍然 不是很稳定。 不仅是单个 上电容器的 ESR 效应, 这种全滤波器 设计的差异 还会影响反馈 信号的纹波质量。 若将采用单个 上电容器与采用 π上滤波器的 ACF 的 突发纹波波形进行比较, 它们的波纹成分 会有很大差异。 单电容器设计 包括高频开关 纹波和低频 突发纹波。 而 π 上滤波器 设计不仅包括 开关和突发纹波, 而且包括由于 上电感器 L_o 和 上电容器 C_01 之间的谐振 而导致的附加振铃。 当这种 [听不清] 波纹被用作 突发模式控制的 波纹信号时, 振铃可以很容易地 过早触发下一个 突发数据包 并导致分组 策略效应。 为了解决这个 问题,必须使反馈 信号的不良 波纹成分远离 波纹比较器的 参考阈值, 以便能够消除 低 ESR 上电容器中的 噪声或 π 上滤波器中的 振铃的影响。 我们提出的 电路级解决方案 称为有源纹波 补偿,缩写为 ARC。 ARC 电路位于 主控制器的 反馈引脚处。 进入控制器的 总反馈电流信号 是光耦合器 电流与来自 ARC 电路的 补偿电流的和。 直观的理解是, 使用 ARC 电路的 干净的人工纹波, 以压倒光耦合器的 噪声纹波,从而 使突降低发控制环路 对噪声的敏感性。 具体来说, 是由简单的开关 电阻网络产生的 干净人工纹波。 开关的开/关计时 与来自我们 控制器的 RUN 引脚电压的 突发开/关信号同步。 当 RUN 引脚处于 高电压且 ARC 开关 Q_COMP 处于导通 状态时,将向 补偿电阻器 R_COMP 施加反馈电压。 因此,会根据 欧姆定律产生 补偿电流 I_COMP。 在计时图中, I_COMP 是一个偏移信号。 它与光耦合器 电流 I_OPTO 叠加, 所以 [听不清] 反馈电流 I_FB 也会出现偏移。 在突发数据包中 产生三个连续的 开关脉冲后, 突发控制环路 会停止开关, RUN 电压变为 低位状态。 当 RUN 引脚电压为零伏时, Q_COMP 关闭。 判断电容 Q_COMP 和 R_COMP 电阻器 会从 RC 时间 常数产生一个 时间延迟,最大值 I_COMP 逐渐减小。 补偿信号 I_COMP 的 偏移和共享 折叠时间 有助于使光耦合器 电流的不良 波纹成分远离 基准信号, 从而避免过早 触发下一个 突发数据组, 同时实现稳定的突发 运行。 这张幻灯片显示了 具有低 ESR 输出 电容器的 ACF 的 ARC 电路的有效性。 没有 ARC 电路时, 较低的上纹波 会使突发模式 对噪声非常敏感。 在应用 ARC 电路之后, 干净的人工 纹波会压倒噪声, 并实现稳定的 突发运行。 这张幻灯片显示了 具有 π 上滤波器的 ACF 的 ARC 电路的性能。 没有 ARC 电路时, L_O 与 C_01 之间的谐振引起的 上纹波的振铃 会使突发模式 对噪声非常敏感。 在应用 ARC 电路后, 干净的人工纹波 克服了振铃效应, 并导致稳定的突发 运行。 在本设计中, 除了 ARC 电路外, 还有一个串联 阻尼网络与 上电感器并联, 以解决 ACF [听不清] 滤波器的另一个问题。 我们将在下一部分中 详细讨论这一点。 我们首先来看看 突发模式期间脉冲级 波形上发生的情况。 从概念角度来看,当 ACF 包含 π 上部滤波器时, 谐振槽将不仅 包含箝位电容器, 而且还包含 π 上滤波器中的 滤波器电容器 C_01。 因此,当谐振 开始时, 两个电容器 之间的电压差 将极大地影响 初级侧和次级侧的 谐振波形。 例如,如果 初始箝位电压 条件高于 反射的 C_01 电压, 则在谐振期间 会有更多最小 电流流经 第二 [听不清]。 相反,如果初始 C 钳位电压条件 低于反射的 C_01 电压, 则在谐振期间 会有更多最小 电流转回初级 钳位电路, 从而为 C 钳位充电。 突发数据包期间的 不平衡电流 会导致每个开关 周期中出现非常不一致的 谐振电流幅度。 即使突发频率 仍然高于 可听噪声频率, 但不一致的 谐振电流仍然 包含低频谐波, 从而产生 可听噪声。 另一个问题是, 当开关电流不平衡时, 单个整流器的 运行将非常 不稳定,并导致 效率下降。 为了解决这个问题, 我们建议使用 C [听不清]。 本幻灯片说明了 ACF 脉冲级 小信号电流 电路的电压控制 电流源流到上场 支路时的频域 串联阻尼效应。 L_O 和 C_01 在自谐振频率处 产生高耦合峰值。 当串联阻尼 网络与主电感 并联时, 双峰现象 将被抑制。 降低其频率 范围内的峰值的 物理意义在于, 纹波成分不会被放大, 这有利于 C 钳位电压和 反射的 C_01 电压 之间的 [听不清] 时域电压差。 我推导出了 阻尼比的表达式。 可以看出, 阻尼电感越低, 阻尼越强。 但是,任何东西都具有两面性。 过强的阻尼 仅仅是通过 零阻尼网络便会 耗费更多的交流开关电流, 并导致 [听不清] 低位时的功率损耗。 对于 45 瓦的 ACF 设计, 如果阻尼电感 为主电感器的 1/10 左右, 则低线效率 将下降 0.5%。 但是,如果 阻尼电感 高于主电感器的1/10, 则交流电流将流经 网络,并导致较少的 功率损耗。 对于 45 瓦的 ACF 设计, 如果阻尼电感 为 0.68 微亨, 主电感为 1 微亨, 则效率仅会 下降 0.15%。 问题是如何 确定阻尼强度。 这张幻灯片 举例说明了如何 选择阻尼强度。 其中的设计技巧是, 您可以逐渐 减小阻尼电感, 直到发现谐振 电路波形得到 改善且 [听不清] 整流器的 GaN 电压 开始在每个开关 周期中提供一致的 控制信号。 我们发现, 对于 1 微亨 输出 [听不清], 0.68 微亨的弱阻尼 设计就足够了。 此外,此测量 波形还证明, 零阻尼下 频域中的 [听不清] 减小了 双峰效应, C_01 的上纹波降低。 然后两个电容 电压的差距变小, 从而在每个 开关周期中 产生更一致的 谐振电流幅度。 这张幻灯片为您 提供了示例选择指南。 有趣的是, 阻尼电感器尺寸 要比主电感器 小得多, 并且类似于 1206 电容器。 此外,由于电感器的 绕组电阻可以是 一个自由 阻尼电阻器, 因此实际实施中的 阻尼网络只有一个 组件。 让我们总结一下我们在 本次中所讨论的内容。 首先,论证了 采用 TI 新型 TCF 芯片组的 ACF 的 效率优势,并与工作 频率高于 130 千赫的 高密度 45 瓦适配器上的 QR 反激式进行了比较。 其次,提出了一种 独特的 ACF 小信号 建模技术。 比较了连续 导通模式和 转换模式下的 独特 [听不清] 特性。 第三,展示了 ACF 在突发模式下的轻负载 效率优势。 并且强调了 稳定性和 SR 运行 问题。 最后,介绍了 两种纹波补偿技术和 串联阻尼方法, 它们可以有效地 稳定突发控制 环路和 SR 运行。 我的演示到此结束。 非常感谢。 554
大家好! 我叫 Pei-Hsin Liu。 我是一名 [听不清] 在线 高电压控制器助理 工程师。 本次演示的主题是 揭开有源钳位 反激式环路补偿的 神秘面纱。 本部分涵盖了针对 ACF 的转换模式 和 CCM 模式进行的 小信号属性分析。 第二,我们会介绍 ACF 的突发运行 模式的优势和 稳定性问题。 第三,我们将基于 分析模型和两种 可用于稳定突发 控制环路的 简单纹波补偿方法, 给出相关设计 准则。 适用的终端 设备包括 高密度交流 适配器或充电器、 USB 供电充电器以及 交流/直流或直流/直流 辅助电源。 本演示可分为 五个部分。 首先,我们将 讨论电流模式 控制的 ACF 的 小信号模型。 其次,我们将介绍作为 ACF 轻负载运行模式的 突发模式。 第三,我们将描述用于 稳定突发模式控制的 纹波补偿。 然后对带 π 输出 滤波器的 ACF 的串联 阻尼进行说明, 最后总结本节课 学习的内容。 这些幻灯片将会介绍 为什么有源钳位反激式 ACF 可提供 大大优于 传统准谐振 反激式 QR 的性能。 高速钳位电路 通过二极管 以及 [听不清] TVS 或 R-C 缓冲器 进行整流,[听不清], 广泛应用于我们的 反激式 [听不清] 中, [听不清]。 但是,却浪费了 [听不清] 能量。 并且这种功率 损耗会降低效率。 其次,在打开 [听不清] 开关的情况下, 如果您打开 [听不清], 则仍会出现开关 过热的情况。 PC 的第一个 分支 [听不清], 发生一定程度的开关损耗。 第三,在 [听不清] 停止后,[听不清] 和判断电容将产生 高摩擦 [听不清] 并影响 EMI。 而有源钳位 反激式 ACF 则是 由有源高侧 开关 Q 边缘构成, 可通过 [听不清] C 钳位来消除 这些不利因素, 尤其是打开 QH, 找到 [听不清] 电容器中的 驻留路径 [听不清], 从而使潜伏的能量 根据我们的状态循环流动到输出端。 如果 QH 保持开启 状态,可能不会 流过的电流 将变成第一反应。 在 Q_H 关闭后, 非激活部分 可用于通过停止 使该判断电容 在开关节点上进行放电。 打开 QL 后, 谐振到 0 伏。 在达到零伏时, 便实现了 ZVS。 此外,由于初级 电流是连续的 波形,所以没有 像基本钳位 那样的高频 [听不清], 这有利于 EMI 功能。 此图表总结了 不同功率水平下的 反激功率密度。 对于 15 瓦的手机充电器, 反激式上的 RHQ 状态 仅为每立方 英寸 9 瓦。 对于 45 瓦、 65 瓦和没有 适配器的情况,QR 反激式 已经达到了低于每立方英寸 11 瓦的功率密度限制。 为了满足大幅 减小体积的需求, 我们的团队开发了 ACF 支持构建 控制器。 一个是行业首创的 [听不清] 上频 ACF 控制器 UCC28780,一个是 全新 SR 控制器 UCC24612, 二者均可支持初级 增益和开关功率级, 并能够提供 1 兆赫的工作频率。 使用的参考 设计可确保 我们的解决 方案在 27 瓦的 USBCPD 手机充电器上 实现每立方英寸 91 瓦, 在手机适配器情况下则可 实现每立方英寸 31 瓦。 右图是在 65 千赫 区域内采用 QR 反激式 架构和在高于 200 千赫区域内采用 ACF 架构的 65 瓦适配器的 物理尺寸比较。 该设计表明, ACF 适配器的体积 显著减小,其峰值 效率可达 94%。 除了 65 瓦的 设计之外,我们 还需要对开关频率 高于 200 千赫的 45 瓦适配器 进行效率比较。 由于占主导 地位的开关 损耗和箝位损耗, 随着输入线路 电压的增加, 具有流畅增压 MOSFET 的 QR 反激式的 整体效率会变差。 而 ACF 却可以 在宽输入范围内保持 非常高的效率。 试验结果表明, ACF 的效率 比 QR 高 3.6%。 对于高强度考虑, [听不清] 器件 可以在宽输入范围内 实现高于 94% 的效率, 因为 GaN 器件采用的是 比硅器件中小得多的 判断电容。 ZVS 需要较小的 [听不清] 电流, 我们应该降低 峰值最小电流。 变压器的 [听不清] 和 [听不清] 损耗降低, 从而可实现更高的 效率,并导致 GaN 和硅器件之间 出现 1% 的效率差距。 这是 ACF 的主要 [听不清] 电流波形, 其中有一个部分是未激活的。 有争议的是, 这是 CCM 还是转换模式。 以下是我的个人看法。 从一个小的方面 来看,主要 [听不清] 电流的峰值 仅受峰值环路 控制。 但主要 [听不清] 电流不受 另一个 [听不清] 控制。 这个小信号属性 与 CCM 类似。 CCM 类模式的 裸电流大小的 确定方式为: 利用内部固定频率 时钟关闭 高置开关, 然后在相应 日期/时间之后 开始下一个开关周期。 大多数商用 ACF 控制器 都是基于这种运行模式, 包括 TS 传统 ACF 控制器 UCC289x。 另一方面,它具有 抵抗性内核控制, 包括峰值电流 环路和谷电流 环路。 所以,这个 小信号属性 与转换运行模式类似。 具体来说, 负主要 [听不清] 电流的大小 由谷值电流 环路独立调节。 这个开关 频率是可变的。 我们的全新控制器 UCC28780 是行业领先的 ACF 控制器,采用了 抵抗性内核控制的概念。 在下一张幻灯片中, 我会对 CCM 和转换 运行模式的小信号 特性进行比较。 这是基于 CCM 运行 模式的 UCC289x 的示意图。 上电压反馈环路的 控制电压 VCST 会控制峰值 主要 [听不清] 电流,所以电流感测 电阻器 RCS 在低侧 开关上。 对于反馈 环路补偿, 了解 VCST 到 上 40s 的传递函数 对补偿设计 有重要意义。 右侧显示了 CCM 运行 模式下的波德图。 您可以看到, 除了低频极点和 上电容器的 ESR 零点, 还有一个导致了 93 个相位的 延迟的右半平面零点。 开关频率的 中点处还有 一个双极点, 它引入了 另外 180 度的首次延迟。 这些强烈的首次延迟 将会对高容量设计 造成限制,因此, 为了满足负载传送需求, 需要使用 较大的上电容。 除此之外,为了减小 中点 [听不清] 频率 双极点,以防止 电流环路的 不稳定, 当占空比 大于 50% 时 需要进行 斜率补偿, 这使环路补偿进一步 复杂化。 这是基于 转换运行 模式的 UCC28780 的 示意图, 它包括峰值电流 环路和仿真谷值 电流环路。 峰值电流环路 控制从电流感测 电阻器 RCS 发送而来的 峰值主要 [听不清] 电流。 谷值电流 环路则通过 控制器中的自适应 ZVS 控件来控制 [听不清] 主要 [听不清] 电流。 该环路确定开关 节点电压 VSW 上的 ZVS 条件,以调整 高侧开关的导通时间 宽度。 小信号特性表明, 右平面零点和中点 [听不清] 开关频率 双极点消失了。 所以补偿设计 变得非常简单。 此外,消除 这些相位延迟 会导致具有足够相位 裕度的较高 [听不清] 设计。 最后,由于 当占空比 大于 50% 时, 电流环路没有 稳定性问题, 所以不需要 斜率补偿。 下一步需要 通过解析式的 模型表达式来指导 环路补偿。 然而,由于 次级侧上 ACF 开关电流 波形的相关性, 很难用解析 方法表征其 小信号特性。 我将向您展示 一种简单的典型建模 技术,它可以消除 谐振波形描述的 复杂性。 首先,可以合理地 将主要 [听不清] 电流 波形近似为 以深红色表示的 三角波形。 然后,低侧 开关上的开关 电流波形 I_QL 以蓝色表示, 包含主要 [听不清] 电流的中点信息。 这样,用一阶 公式来描述 I_QL 的 平均值就简单了许多, 如该公式所示。 其次,由于 I_QL 的实际值 也是 ACF 转换器的 平均输入电流, 因此可以根据 能量守恒定律 获得次级侧中 上电流的平均值。 然后,为了获得 小信号属性, 在转换器的 平衡点上 计算扰动 信号的偏导数。 最后,便可获得 小信号分析的等效 电路模型。 如您所见, 控制电压 V_CST 通过对电压 控制电流源 进行调幅 来调节上电压, 该电压会流经 上电容分支, 是电源转换器的 小信号 表示。 利用提出的模型, 可以导出 从 V_CST 到 上电压的传递函数的 解析表达式。 该表中总结了 这些参数。 右图比较了 传递函数和 简化比率 结果的波德图。 该模型提供了 高达开关频率的 四分之一的 非常精确的结果, 足以指导 环路补偿, 并验证了转换运行 模式下的 ACF 的 小信号属性。 现在,我们来看一下 ACF 中作为轻负载 运行模式的突发模式。 随着输出负载减小, 负最小电流 i_m- 保持不变, 正峰值电流 i_m+ 变小。 正峰值电流用于 向输出端传递 有源能量, 而负电流 则存储单独的能量 以实现 ZVS。 即随着负载变小, 正峰值电流和 负电流的幅度 越来越接近。 这意味着, 由于循环 能量的贡献 越来越大, 变压器效率 越来越差。 对于光滑的 ACF, 由于即将出现的电容, 高线处的裸电流较大。 随着输出 负载减小, 负电流影响 变得更加显著, 因此与扫描 ACF 相比, 效率会非常 迅速地恶化。 对硅 ACF 的 测量结果表明, 50% 负载 和 25% 负载的 效率差可达 7.3%。 而对于 GaN ACF, 由于它的低结电容, 负电流要比硅 ACF 小得多。 并且负载变得更小, 负电流影响 更小。 您可以看到, 50% 负载和 25% 负载 之间的效率差异仅为 2.6%。 ACF 理想轻载模式的 最关键要求是 将正峰值电流 保持在相对于 负电流来说 较高的水平。 UCC28780 采用突发模式 控制来提高轻载 效率。 正峰值电流 由 [听不清] 编程, 以克服最小电流 对效率的影响。 在本示例中, 每个突发数据包 有四个开关极点。 突发时间 随上载条件变化。 左侧显示了 控制低点。 当循环利用 该环路时, 峰值电流 会越来越低, 最终达到 可编程的阈值 并进入突发模式。 在这种情况下,由于突发 开始于非常轻的负载, 效率会下降太多。 为了提高效率, 通过电阻 分压器的较高 [听不清] 电压 会设置较高的峰值端 阈值,因此转换器 在较重的负载条件下 进入突发模式。 这样便可以显著 提高轻负载效率。 这张幻灯片 显示了用 UCC28780 控制的 45 瓦 GaN ACF 设计的效率测试结果。 当 ACF 在低于 60% 负荷下 进入突发模式后, 效率下降 趋于平缓, 平均效率显著 高于 COC 和 理论标准。 这张幻灯片说明了 基本突发模式控制的 控制环路设计。 将来自上电压 反馈环路的反馈 信号 I_FB 与阈值 I_REF 进行比较,以确定 突发数据包的开始。 计数器会 确定突发 数据包结束时 突发模式下的 开关周期的数量。 逻辑 [听不清] 信号 会反映计时的突发。 当两个信号相交时, RUN 处于高位, 这允许有限数量的 开关脉冲, 因为仿真 结果表明 纹波和反馈 信号 I_FB 参与上电压调节, 所以纹波质量会影响 突发模式控制。 下面的幻灯片 将介绍用于 稳定突发模式 控制的波纹 补偿技术。 由于反馈信号 I_FB 的纹波成分 会影响控制低位, 因此反馈信号 与上电压信号 之间的突发 频率纹波的 脉冲延迟必须 尽可能小, 以便反馈信号 反映上电压的 实时纹波成分。 否则,您将看到 一个现象,即每两个 突发周期, 两组突发数据包 便会出现在一起, 且具有非常短和非常 长的突发时间, 并且可能产生最佳 噪声频率。 为了解决这个问题, 需要通过适当的 补偿来将反馈环路中的 突发延迟最小化。 左图显示了 初级侧和次级侧 之间的反馈 环路电路。 次级侧由 [听不清] 并联稳压器 ATO、旁路 稳压器 R_BIAS1 以及 与 R_BIAS1、Rdiff 和 Cdiff 并联的 RC 网络组成。 它们将上电压 信号转换为流经 光耦合器输入 [听不清] 的误差 电流信号。 光耦合器通过 误差电流信号 输出到主控制器 以进行上电压调节。 在这个信号链中, 光耦合器的 [听不清] 和输出会引入 低频相位延迟, 该延迟在 [听不清] 突发域中表示为 单个极点。 为了克服光耦合器的 相位延迟, 转换器上的单个零点 被放置在靠近 极点的位置,希望通过 电路图中的 Rdiff 和 Cdiff 实现该目的。 在正确设计 推荐的无源纹波 补偿后, 在使用电解 上电容器时, 可在突发数据包中 使用稳定的 开关 [听不清] 来稳定突发 控制环路。 电解电容器包含 较大的等效串联 电阻 ESR。 但是聚合物或陶瓷 电容器的 ESR 要低得多。 较小的 ESR 可减小上电压纹波。 但是,它会给 依赖于良好纹波 质量的突发 运行模式带来 不利影响。 最后,即使补偿 设计是正确的,也可能 由于 [听不清] 噪声造成突发 运行模式仍然 不是很稳定。 不仅是单个 上电容器的 ESR 效应, 这种全滤波器 设计的差异 还会影响反馈 信号的纹波质量。 若将采用单个 上电容器与采用 π上滤波器的 ACF 的 突发纹波波形进行比较, 它们的波纹成分 会有很大差异。 单电容器设计 包括高频开关 纹波和低频 突发纹波。 而 π 上滤波器 设计不仅包括 开关和突发纹波, 而且包括由于 上电感器 L_o 和 上电容器 C_01 之间的谐振 而导致的附加振铃。 当这种 [听不清] 波纹被用作 突发模式控制的 波纹信号时, 振铃可以很容易地 过早触发下一个 突发数据包 并导致分组 策略效应。 为了解决这个 问题,必须使反馈 信号的不良 波纹成分远离 波纹比较器的 参考阈值, 以便能够消除 低 ESR 上电容器中的 噪声或 π 上滤波器中的 振铃的影响。 我们提出的 电路级解决方案 称为有源纹波 补偿,缩写为 ARC。 ARC 电路位于 主控制器的 反馈引脚处。 进入控制器的 总反馈电流信号 是光耦合器 电流与来自 ARC 电路的 补偿电流的和。 直观的理解是, 使用 ARC 电路的 干净的人工纹波, 以压倒光耦合器的 噪声纹波,从而 使突降低发控制环路 对噪声的敏感性。 具体来说, 是由简单的开关 电阻网络产生的 干净人工纹波。 开关的开/关计时 与来自我们 控制器的 RUN 引脚电压的 突发开/关信号同步。 当 RUN 引脚处于 高电压且 ARC 开关 Q_COMP 处于导通 状态时,将向 补偿电阻器 R_COMP 施加反馈电压。 因此,会根据 欧姆定律产生 补偿电流 I_COMP。 在计时图中, I_COMP 是一个偏移信号。 它与光耦合器 电流 I_OPTO 叠加, 所以 [听不清] 反馈电流 I_FB 也会出现偏移。 在突发数据包中 产生三个连续的 开关脉冲后, 突发控制环路 会停止开关, RUN 电压变为 低位状态。 当 RUN 引脚电压为零伏时, Q_COMP 关闭。 判断电容 Q_COMP 和 R_COMP 电阻器 会从 RC 时间 常数产生一个 时间延迟,最大值 I_COMP 逐渐减小。 补偿信号 I_COMP 的 偏移和共享 折叠时间 有助于使光耦合器 电流的不良 波纹成分远离 基准信号, 从而避免过早 触发下一个 突发数据组, 同时实现稳定的突发 运行。 这张幻灯片显示了 具有低 ESR 输出 电容器的 ACF 的 ARC 电路的有效性。 没有 ARC 电路时, 较低的上纹波 会使突发模式 对噪声非常敏感。 在应用 ARC 电路之后, 干净的人工 纹波会压倒噪声, 并实现稳定的 突发运行。 这张幻灯片显示了 具有 π 上滤波器的 ACF 的 ARC 电路的性能。 没有 ARC 电路时, L_O 与 C_01 之间的谐振引起的 上纹波的振铃 会使突发模式 对噪声非常敏感。 在应用 ARC 电路后, 干净的人工纹波 克服了振铃效应, 并导致稳定的突发 运行。 在本设计中, 除了 ARC 电路外, 还有一个串联 阻尼网络与 上电感器并联, 以解决 ACF [听不清] 滤波器的另一个问题。 我们将在下一部分中 详细讨论这一点。 我们首先来看看 突发模式期间脉冲级 波形上发生的情况。 从概念角度来看,当 ACF 包含 π 上部滤波器时, 谐振槽将不仅 包含箝位电容器, 而且还包含 π 上滤波器中的 滤波器电容器 C_01。 因此,当谐振 开始时, 两个电容器 之间的电压差 将极大地影响 初级侧和次级侧的 谐振波形。 例如,如果 初始箝位电压 条件高于 反射的 C_01 电压, 则在谐振期间 会有更多最小 电流流经 第二 [听不清]。 相反,如果初始 C 钳位电压条件 低于反射的 C_01 电压, 则在谐振期间 会有更多最小 电流转回初级 钳位电路, 从而为 C 钳位充电。 突发数据包期间的 不平衡电流 会导致每个开关 周期中出现非常不一致的 谐振电流幅度。 即使突发频率 仍然高于 可听噪声频率, 但不一致的 谐振电流仍然 包含低频谐波, 从而产生 可听噪声。 另一个问题是, 当开关电流不平衡时, 单个整流器的 运行将非常 不稳定,并导致 效率下降。 为了解决这个问题, 我们建议使用 C [听不清]。 本幻灯片说明了 ACF 脉冲级 小信号电流 电路的电压控制 电流源流到上场 支路时的频域 串联阻尼效应。 L_O 和 C_01 在自谐振频率处 产生高耦合峰值。 当串联阻尼 网络与主电感 并联时, 双峰现象 将被抑制。 降低其频率 范围内的峰值的 物理意义在于, 纹波成分不会被放大, 这有利于 C 钳位电压和 反射的 C_01 电压 之间的 [听不清] 时域电压差。 我推导出了 阻尼比的表达式。 可以看出, 阻尼电感越低, 阻尼越强。 但是,任何东西都具有两面性。 过强的阻尼 仅仅是通过 零阻尼网络便会 耗费更多的交流开关电流, 并导致 [听不清] 低位时的功率损耗。 对于 45 瓦的 ACF 设计, 如果阻尼电感 为主电感器的 1/10 左右, 则低线效率 将下降 0.5%。 但是,如果 阻尼电感 高于主电感器的1/10, 则交流电流将流经 网络,并导致较少的 功率损耗。 对于 45 瓦的 ACF 设计, 如果阻尼电感 为 0.68 微亨, 主电感为 1 微亨, 则效率仅会 下降 0.15%。 问题是如何 确定阻尼强度。 这张幻灯片 举例说明了如何 选择阻尼强度。 其中的设计技巧是, 您可以逐渐 减小阻尼电感, 直到发现谐振 电路波形得到 改善且 [听不清] 整流器的 GaN 电压 开始在每个开关 周期中提供一致的 控制信号。 我们发现, 对于 1 微亨 输出 [听不清], 0.68 微亨的弱阻尼 设计就足够了。 此外,此测量 波形还证明, 零阻尼下 频域中的 [听不清] 减小了 双峰效应, C_01 的上纹波降低。 然后两个电容 电压的差距变小, 从而在每个 开关周期中 产生更一致的 谐振电流幅度。 这张幻灯片为您 提供了示例选择指南。 有趣的是, 阻尼电感器尺寸 要比主电感器 小得多, 并且类似于 1206 电容器。 此外,由于电感器的 绕组电阻可以是 一个自由 阻尼电阻器, 因此实际实施中的 阻尼网络只有一个 组件。 让我们总结一下我们在 本次中所讨论的内容。 首先,论证了 采用 TI 新型 TCF 芯片组的 ACF 的 效率优势,并与工作 频率高于 130 千赫的 高密度 45 瓦适配器上的 QR 反激式进行了比较。 其次,提出了一种 独特的 ACF 小信号 建模技术。 比较了连续 导通模式和 转换模式下的 独特 [听不清] 特性。 第三,展示了 ACF 在突发模式下的轻负载 效率优势。 并且强调了 稳定性和 SR 运行 问题。 最后,介绍了 两种纹波补偿技术和 串联阻尼方法, 它们可以有效地 稳定突发控制 环路和 SR 运行。 我的演示到此结束。 非常感谢。 554
大家好!
我叫 Pei-Hsin Liu。
我是一名 [听不清] 在线 高电压控制器助理
工程师。
本次演示的主题是 揭开有源钳位
反激式环路补偿的 神秘面纱。
本部分涵盖了针对 ACF 的转换模式
和 CCM 模式进行的 小信号属性分析。
第二,我们会介绍 ACF 的突发运行
模式的优势和 稳定性问题。
第三,我们将基于 分析模型和两种
可用于稳定突发 控制环路的
简单纹波补偿方法, 给出相关设计
准则。
适用的终端 设备包括
高密度交流 适配器或充电器、
USB 供电充电器以及 交流/直流或直流/直流
辅助电源。
本演示可分为 五个部分。
首先,我们将 讨论电流模式
控制的 ACF 的 小信号模型。
其次,我们将介绍作为 ACF 轻负载运行模式的
突发模式。
第三,我们将描述用于 稳定突发模式控制的
纹波补偿。
然后对带 π 输出 滤波器的 ACF 的串联
阻尼进行说明, 最后总结本节课
学习的内容。
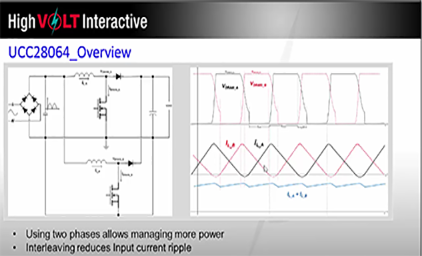
这些幻灯片将会介绍 为什么有源钳位反激式
ACF 可提供 大大优于
传统准谐振 反激式 QR 的性能。
高速钳位电路 通过二极管
以及 [听不清] TVS 或 R-C 缓冲器
进行整流,[听不清], 广泛应用于我们的
反激式 [听不清] 中,
[听不清]。
但是,却浪费了 [听不清] 能量。
并且这种功率 损耗会降低效率。
其次,在打开 [听不清] 开关的情况下,
如果您打开 [听不清], 则仍会出现开关
过热的情况。
PC 的第一个 分支 [听不清],
发生一定程度的开关损耗。
第三,在 [听不清] 停止后,[听不清]
和判断电容将产生 高摩擦 [听不清]
并影响 EMI。
而有源钳位
反激式 ACF 则是 由有源高侧
开关 Q 边缘构成, 可通过 [听不清] C
钳位来消除 这些不利因素,
尤其是打开 QH, 找到 [听不清] 电容器中的
驻留路径 [听不清], 从而使潜伏的能量
根据我们的状态循环流动到输出端。
如果 QH 保持开启 状态,可能不会
流过的电流 将变成第一反应。
在 Q_H 关闭后, 非激活部分
可用于通过停止 使该判断电容
在开关节点上进行放电。
打开 QL 后, 谐振到 0 伏。
在达到零伏时, 便实现了 ZVS。
此外,由于初级 电流是连续的
波形,所以没有 像基本钳位
那样的高频 [听不清], 这有利于 EMI 功能。
此图表总结了 不同功率水平下的
反激功率密度。
对于 15 瓦的手机充电器, 反激式上的 RHQ 状态
仅为每立方 英寸 9 瓦。
对于 45 瓦、 65 瓦和没有
适配器的情况,QR 反激式 已经达到了低于每立方英寸
11 瓦的功率密度限制。
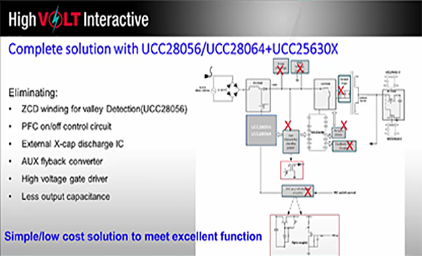
为了满足大幅 减小体积的需求,
我们的团队开发了 ACF 支持构建
控制器。
一个是行业首创的 [听不清] 上频 ACF
控制器 UCC28780,一个是 全新 SR 控制器 UCC24612,
二者均可支持初级 增益和开关功率级,
并能够提供 1 兆赫的工作频率。
使用的参考 设计可确保
我们的解决 方案在 27 瓦的
USBCPD 手机充电器上 实现每立方英寸 91 瓦,
在手机适配器情况下则可 实现每立方英寸 31 瓦。
右图是在 65 千赫 区域内采用
QR 反激式 架构和在高于
200 千赫区域内采用 ACF 架构的 65 瓦适配器的
物理尺寸比较。
该设计表明, ACF 适配器的体积
显著减小,其峰值 效率可达 94%。
除了 65 瓦的 设计之外,我们
还需要对开关频率 高于 200 千赫的
45 瓦适配器 进行效率比较。
由于占主导 地位的开关
损耗和箝位损耗, 随着输入线路
电压的增加, 具有流畅增压
MOSFET 的 QR 反激式的 整体效率会变差。
而 ACF 却可以 在宽输入范围内保持
非常高的效率。
试验结果表明, ACF 的效率
比 QR 高 3.6%。
对于高强度考虑, [听不清] 器件
可以在宽输入范围内 实现高于 94% 的效率,
因为 GaN 器件采用的是 比硅器件中小得多的
判断电容。
ZVS 需要较小的 [听不清] 电流,
我们应该降低 峰值最小电流。
变压器的 [听不清] 和 [听不清] 损耗降低,
从而可实现更高的 效率,并导致
GaN 和硅器件之间 出现 1% 的效率差距。
这是 ACF 的主要 [听不清] 电流波形,
其中有一个部分是未激活的。
有争议的是, 这是 CCM 还是转换模式。
以下是我的个人看法。
从一个小的方面 来看,主要 [听不清]
电流的峰值 仅受峰值环路
控制。
但主要 [听不清] 电流不受
另一个 [听不清] 控制。
这个小信号属性 与 CCM 类似。
CCM 类模式的 裸电流大小的
确定方式为: 利用内部固定频率
时钟关闭 高置开关,
然后在相应 日期/时间之后
开始下一个开关周期。
大多数商用 ACF 控制器
都是基于这种运行模式, 包括 TS 传统 ACF
控制器 UCC289x。
另一方面,它具有 抵抗性内核控制,
包括峰值电流 环路和谷电流
环路。
所以,这个 小信号属性
与转换运行模式类似。
具体来说, 负主要 [听不清]
电流的大小 由谷值电流
环路独立调节。
这个开关 频率是可变的。
我们的全新控制器 UCC28780 是行业领先的 ACF
控制器,采用了 抵抗性内核控制的概念。
在下一张幻灯片中, 我会对 CCM 和转换
运行模式的小信号 特性进行比较。
这是基于 CCM 运行 模式的 UCC289x 的示意图。
上电压反馈环路的 控制电压 VCST
会控制峰值 主要 [听不清]
电流,所以电流感测 电阻器 RCS 在低侧
开关上。
对于反馈 环路补偿,
了解 VCST 到 上 40s 的传递函数
对补偿设计 有重要意义。
右侧显示了 CCM 运行 模式下的波德图。
您可以看到, 除了低频极点和
上电容器的 ESR 零点,
还有一个导致了 93 个相位的
延迟的右半平面零点。
开关频率的 中点处还有
一个双极点, 它引入了
另外 180 度的首次延迟。
这些强烈的首次延迟 将会对高容量设计
造成限制,因此, 为了满足负载传送需求,
需要使用 较大的上电容。
除此之外,为了减小 中点 [听不清] 频率
双极点,以防止 电流环路的
不稳定, 当占空比
大于 50% 时 需要进行
斜率补偿, 这使环路补偿进一步
复杂化。
这是基于 转换运行
模式的 UCC28780 的 示意图,
它包括峰值电流 环路和仿真谷值
电流环路。
峰值电流环路 控制从电流感测
电阻器 RCS 发送而来的 峰值主要 [听不清]
电流。
谷值电流 环路则通过
控制器中的自适应 ZVS 控件来控制
[听不清] 主要 [听不清] 电流。
该环路确定开关 节点电压 VSW 上的
ZVS 条件,以调整 高侧开关的导通时间
宽度。
小信号特性表明,
右平面零点和中点
[听不清] 开关频率 双极点消失了。
所以补偿设计 变得非常简单。
此外,消除 这些相位延迟
会导致具有足够相位 裕度的较高 [听不清]
设计。
最后,由于 当占空比
大于 50% 时, 电流环路没有
稳定性问题, 所以不需要
斜率补偿。
下一步需要 通过解析式的
模型表达式来指导 环路补偿。
然而,由于 次级侧上 ACF
开关电流 波形的相关性,
很难用解析 方法表征其
小信号特性。
我将向您展示 一种简单的典型建模
技术,它可以消除 谐振波形描述的
复杂性。
首先,可以合理地 将主要 [听不清] 电流
波形近似为 以深红色表示的
三角波形。
然后,低侧 开关上的开关
电流波形 I_QL 以蓝色表示,
包含主要 [听不清] 电流的中点信息。
这样,用一阶 公式来描述 I_QL 的
平均值就简单了许多, 如该公式所示。
其次,由于 I_QL 的实际值
也是 ACF 转换器的 平均输入电流,
因此可以根据 能量守恒定律
获得次级侧中 上电流的平均值。
然后,为了获得 小信号属性,
在转换器的 平衡点上
计算扰动 信号的偏导数。
最后,便可获得 小信号分析的等效
电路模型。
如您所见, 控制电压 V_CST
通过对电压 控制电流源
进行调幅 来调节上电压,
该电压会流经 上电容分支,
是电源转换器的 小信号
表示。
利用提出的模型, 可以导出
从 V_CST 到 上电压的传递函数的
解析表达式。
该表中总结了 这些参数。
右图比较了 传递函数和
简化比率 结果的波德图。
该模型提供了 高达开关频率的
四分之一的 非常精确的结果,
足以指导 环路补偿,
并验证了转换运行 模式下的 ACF 的
小信号属性。
现在,我们来看一下 ACF 中作为轻负载
运行模式的突发模式。
随着输出负载减小, 负最小电流
i_m- 保持不变,
正峰值电流 i_m+ 变小。
正峰值电流用于 向输出端传递
有源能量, 而负电流
则存储单独的能量 以实现 ZVS。
即随着负载变小,
正峰值电流和 负电流的幅度
越来越接近。
这意味着, 由于循环
能量的贡献 越来越大,
变压器效率 越来越差。
对于光滑的 ACF, 由于即将出现的电容,
高线处的裸电流较大。
随着输出 负载减小,
负电流影响 变得更加显著,
因此与扫描 ACF 相比, 效率会非常
迅速地恶化。
对硅 ACF 的 测量结果表明,
50% 负载 和 25% 负载的
效率差可达 7.3%。
而对于 GaN ACF,
由于它的低结电容, 负电流要比硅 ACF
小得多。
并且负载变得更小, 负电流影响
更小。
您可以看到, 50% 负载和 25% 负载
之间的效率差异仅为 2.6%。
ACF 理想轻载模式的 最关键要求是
将正峰值电流 保持在相对于
负电流来说 较高的水平。
UCC28780 采用突发模式 控制来提高轻载
效率。
正峰值电流 由 [听不清] 编程,
以克服最小电流 对效率的影响。
在本示例中, 每个突发数据包
有四个开关极点。
突发时间 随上载条件变化。
左侧显示了 控制低点。
当循环利用 该环路时,
峰值电流 会越来越低,
最终达到 可编程的阈值
并进入突发模式。
在这种情况下,由于突发 开始于非常轻的负载,
效率会下降太多。
为了提高效率, 通过电阻
分压器的较高 [听不清] 电压
会设置较高的峰值端 阈值,因此转换器
在较重的负载条件下 进入突发模式。
这样便可以显著 提高轻负载效率。
这张幻灯片 显示了用 UCC28780
控制的 45 瓦 GaN ACF 设计的效率测试结果。
当 ACF 在低于 60% 负荷下 进入突发模式后,
效率下降 趋于平缓,
平均效率显著
高于 COC 和 理论标准。
这张幻灯片说明了 基本突发模式控制的
控制环路设计。
将来自上电压 反馈环路的反馈
信号 I_FB 与阈值 I_REF
进行比较,以确定 突发数据包的开始。
计数器会 确定突发
数据包结束时 突发模式下的
开关周期的数量。
逻辑 [听不清] 信号 会反映计时的突发。
当两个信号相交时, RUN 处于高位,
这允许有限数量的 开关脉冲,
因为仿真 结果表明
纹波和反馈 信号 I_FB
参与上电压调节,
所以纹波质量会影响 突发模式控制。
下面的幻灯片 将介绍用于
稳定突发模式
控制的波纹 补偿技术。
由于反馈信号 I_FB 的纹波成分
会影响控制低位,
因此反馈信号 与上电压信号
之间的突发 频率纹波的
脉冲延迟必须 尽可能小,
以便反馈信号 反映上电压的
实时纹波成分。
否则,您将看到 一个现象,即每两个
突发周期, 两组突发数据包
便会出现在一起, 且具有非常短和非常
长的突发时间, 并且可能产生最佳
噪声频率。
为了解决这个问题, 需要通过适当的
补偿来将反馈环路中的 突发延迟最小化。
左图显示了 初级侧和次级侧
之间的反馈 环路电路。
次级侧由 [听不清] 并联稳压器
ATO、旁路
稳压器 R_BIAS1 以及 与 R_BIAS1、Rdiff 和
Cdiff 并联的 RC 网络组成。
它们将上电压 信号转换为流经
光耦合器输入 [听不清] 的误差
电流信号。
光耦合器通过 误差电流信号
输出到主控制器 以进行上电压调节。
在这个信号链中, 光耦合器的
[听不清] 和输出会引入 低频相位延迟,
该延迟在 [听不清] 突发域中表示为
单个极点。
为了克服光耦合器的 相位延迟,
转换器上的单个零点 被放置在靠近
极点的位置,希望通过 电路图中的 Rdiff 和 Cdiff
实现该目的。
在正确设计 推荐的无源纹波
补偿后, 在使用电解
上电容器时, 可在突发数据包中
使用稳定的 开关 [听不清]
来稳定突发 控制环路。
电解电容器包含 较大的等效串联
电阻 ESR。
但是聚合物或陶瓷 电容器的 ESR 要低得多。
较小的 ESR 可减小上电压纹波。
但是,它会给 依赖于良好纹波
质量的突发 运行模式带来
不利影响。
最后,即使补偿 设计是正确的,也可能
由于 [听不清] 噪声造成突发
运行模式仍然 不是很稳定。
不仅是单个 上电容器的 ESR 效应,
这种全滤波器 设计的差异
还会影响反馈 信号的纹波质量。
若将采用单个 上电容器与采用
π上滤波器的 ACF 的 突发纹波波形进行比较,
它们的波纹成分 会有很大差异。
单电容器设计 包括高频开关
纹波和低频 突发纹波。
而 π 上滤波器 设计不仅包括
开关和突发纹波,
而且包括由于 上电感器 L_o 和
上电容器 C_01 之间的谐振
而导致的附加振铃。
当这种 [听不清] 波纹被用作
突发模式控制的 波纹信号时,
振铃可以很容易地 过早触发下一个
突发数据包 并导致分组
策略效应。
为了解决这个 问题,必须使反馈
信号的不良 波纹成分远离
波纹比较器的 参考阈值,
以便能够消除 低 ESR 上电容器中的
噪声或 π 上滤波器中的
振铃的影响。
我们提出的 电路级解决方案
称为有源纹波 补偿,缩写为 ARC。
ARC 电路位于 主控制器的
反馈引脚处。
进入控制器的 总反馈电流信号
是光耦合器 电流与来自
ARC 电路的 补偿电流的和。
直观的理解是,
使用 ARC 电路的 干净的人工纹波,
以压倒光耦合器的 噪声纹波,从而
使突降低发控制环路 对噪声的敏感性。
具体来说, 是由简单的开关
电阻网络产生的 干净人工纹波。
开关的开/关计时 与来自我们
控制器的 RUN 引脚电压的 突发开/关信号同步。
当 RUN 引脚处于 高电压且 ARC 开关
Q_COMP 处于导通 状态时,将向
补偿电阻器 R_COMP 施加反馈电压。
因此,会根据 欧姆定律产生
补偿电流 I_COMP。
在计时图中, I_COMP 是一个偏移信号。
它与光耦合器 电流 I_OPTO 叠加,
所以 [听不清] 反馈电流 I_FB
也会出现偏移。
在突发数据包中 产生三个连续的
开关脉冲后,
突发控制环路 会停止开关,
RUN 电压变为 低位状态。
当 RUN 引脚电压为零伏时, Q_COMP 关闭。
判断电容 Q_COMP 和 R_COMP 电阻器
会从 RC 时间 常数产生一个
时间延迟,最大值 I_COMP 逐渐减小。
补偿信号 I_COMP 的
偏移和共享 折叠时间
有助于使光耦合器 电流的不良
波纹成分远离 基准信号,
从而避免过早 触发下一个
突发数据组, 同时实现稳定的突发
运行。
这张幻灯片显示了 具有低 ESR 输出
电容器的 ACF 的 ARC 电路的有效性。
没有 ARC 电路时, 较低的上纹波
会使突发模式 对噪声非常敏感。
在应用 ARC 电路之后,
干净的人工 纹波会压倒噪声,
并实现稳定的 突发运行。
这张幻灯片显示了 具有 π 上滤波器的
ACF 的 ARC 电路的性能。
没有 ARC 电路时, L_O 与 C_01
之间的谐振引起的 上纹波的振铃
会使突发模式 对噪声非常敏感。
在应用 ARC 电路后, 干净的人工纹波
克服了振铃效应, 并导致稳定的突发
运行。
在本设计中, 除了 ARC 电路外,
还有一个串联 阻尼网络与
上电感器并联, 以解决 ACF [听不清]
滤波器的另一个问题。
我们将在下一部分中 详细讨论这一点。
我们首先来看看 突发模式期间脉冲级
波形上发生的情况。
从概念角度来看,当 ACF 包含 π 上部滤波器时,
谐振槽将不仅 包含箝位电容器,
而且还包含 π 上滤波器中的
滤波器电容器 C_01。
因此,当谐振 开始时,
两个电容器 之间的电压差
将极大地影响 初级侧和次级侧的
谐振波形。
例如,如果 初始箝位电压
条件高于
反射的 C_01 电压,
则在谐振期间 会有更多最小
电流流经 第二 [听不清]。
相反,如果初始 C 钳位电压条件
低于反射的 C_01 电压,
则在谐振期间 会有更多最小
电流转回初级 钳位电路,
从而为 C 钳位充电。
突发数据包期间的 不平衡电流
会导致每个开关 周期中出现非常不一致的
谐振电流幅度。
即使突发频率 仍然高于
可听噪声频率, 但不一致的
谐振电流仍然 包含低频谐波,
从而产生 可听噪声。
另一个问题是, 当开关电流不平衡时,
单个整流器的 运行将非常
不稳定,并导致 效率下降。
为了解决这个问题, 我们建议使用 C [听不清]。
本幻灯片说明了 ACF 脉冲级
小信号电流 电路的电压控制
电流源流到上场 支路时的频域
串联阻尼效应。
L_O 和 C_01 在自谐振频率处
产生高耦合峰值。
当串联阻尼 网络与主电感
并联时,
双峰现象 将被抑制。
降低其频率 范围内的峰值的
物理意义在于, 纹波成分不会被放大,
这有利于 C 钳位电压和
反射的 C_01 电压 之间的 [听不清]
时域电压差。
我推导出了 阻尼比的表达式。
可以看出, 阻尼电感越低,
阻尼越强。
但是,任何东西都具有两面性。
过强的阻尼 仅仅是通过
零阻尼网络便会 耗费更多的交流开关电流,
并导致 [听不清] 低位时的功率损耗。
对于 45 瓦的 ACF 设计, 如果阻尼电感
为主电感器的 1/10 左右,
则低线效率 将下降 0.5%。
但是,如果 阻尼电感
高于主电感器的1/10,
则交流电流将流经 网络,并导致较少的
功率损耗。
对于 45 瓦的 ACF 设计, 如果阻尼电感
为 0.68 微亨, 主电感为 1 微亨,
则效率仅会 下降 0.15%。
问题是如何 确定阻尼强度。
这张幻灯片 举例说明了如何
选择阻尼强度。
其中的设计技巧是, 您可以逐渐
减小阻尼电感, 直到发现谐振
电路波形得到 改善且 [听不清]
整流器的 GaN 电压
开始在每个开关 周期中提供一致的
控制信号。
我们发现, 对于 1 微亨
输出 [听不清], 0.68 微亨的弱阻尼
设计就足够了。
此外,此测量 波形还证明,
零阻尼下 频域中的
[听不清] 减小了 双峰效应,
C_01 的上纹波降低。
然后两个电容 电压的差距变小,
从而在每个 开关周期中
产生更一致的 谐振电流幅度。
这张幻灯片为您 提供了示例选择指南。
有趣的是, 阻尼电感器尺寸
要比主电感器 小得多,
并且类似于 1206 电容器。
此外,由于电感器的 绕组电阻可以是
一个自由 阻尼电阻器,
因此实际实施中的 阻尼网络只有一个
组件。
让我们总结一下我们在 本次中所讨论的内容。
首先,论证了 采用 TI 新型 TCF
芯片组的 ACF 的 效率优势,并与工作
频率高于 130 千赫的 高密度 45 瓦适配器上的
QR 反激式进行了比较。
其次,提出了一种 独特的 ACF 小信号
建模技术。
比较了连续 导通模式和
转换模式下的 独特 [听不清]
特性。
第三,展示了 ACF 在突发模式下的轻负载
效率优势。
并且强调了 稳定性和 SR 运行
问题。
最后,介绍了 两种纹波补偿技术和
串联阻尼方法,
它们可以有效地 稳定突发控制
环路和 SR 运行。
我的演示到此结束。
非常感谢。 554
大家好! 我叫 Pei-Hsin Liu。 我是一名 [听不清] 在线 高电压控制器助理 工程师。 本次演示的主题是 揭开有源钳位 反激式环路补偿的 神秘面纱。 本部分涵盖了针对 ACF 的转换模式 和 CCM 模式进行的 小信号属性分析。 第二,我们会介绍 ACF 的突发运行 模式的优势和 稳定性问题。 第三,我们将基于 分析模型和两种 可用于稳定突发 控制环路的 简单纹波补偿方法, 给出相关设计 准则。 适用的终端 设备包括 高密度交流 适配器或充电器、 USB 供电充电器以及 交流/直流或直流/直流 辅助电源。 本演示可分为 五个部分。 首先,我们将 讨论电流模式 控制的 ACF 的 小信号模型。 其次,我们将介绍作为 ACF 轻负载运行模式的 突发模式。 第三,我们将描述用于 稳定突发模式控制的 纹波补偿。 然后对带 π 输出 滤波器的 ACF 的串联 阻尼进行说明, 最后总结本节课 学习的内容。 这些幻灯片将会介绍 为什么有源钳位反激式 ACF 可提供 大大优于 传统准谐振 反激式 QR 的性能。 高速钳位电路 通过二极管 以及 [听不清] TVS 或 R-C 缓冲器 进行整流,[听不清], 广泛应用于我们的 反激式 [听不清] 中, [听不清]。 但是,却浪费了 [听不清] 能量。 并且这种功率 损耗会降低效率。 其次,在打开 [听不清] 开关的情况下, 如果您打开 [听不清], 则仍会出现开关 过热的情况。 PC 的第一个 分支 [听不清], 发生一定程度的开关损耗。 第三,在 [听不清] 停止后,[听不清] 和判断电容将产生 高摩擦 [听不清] 并影响 EMI。 而有源钳位 反激式 ACF 则是 由有源高侧 开关 Q 边缘构成, 可通过 [听不清] C 钳位来消除 这些不利因素, 尤其是打开 QH, 找到 [听不清] 电容器中的 驻留路径 [听不清], 从而使潜伏的能量 根据我们的状态循环流动到输出端。 如果 QH 保持开启 状态,可能不会 流过的电流 将变成第一反应。 在 Q_H 关闭后, 非激活部分 可用于通过停止 使该判断电容 在开关节点上进行放电。 打开 QL 后, 谐振到 0 伏。 在达到零伏时, 便实现了 ZVS。 此外,由于初级 电流是连续的 波形,所以没有 像基本钳位 那样的高频 [听不清], 这有利于 EMI 功能。 此图表总结了 不同功率水平下的 反激功率密度。 对于 15 瓦的手机充电器, 反激式上的 RHQ 状态 仅为每立方 英寸 9 瓦。 对于 45 瓦、 65 瓦和没有 适配器的情况,QR 反激式 已经达到了低于每立方英寸 11 瓦的功率密度限制。 为了满足大幅 减小体积的需求, 我们的团队开发了 ACF 支持构建 控制器。 一个是行业首创的 [听不清] 上频 ACF 控制器 UCC28780,一个是 全新 SR 控制器 UCC24612, 二者均可支持初级 增益和开关功率级, 并能够提供 1 兆赫的工作频率。 使用的参考 设计可确保 我们的解决 方案在 27 瓦的 USBCPD 手机充电器上 实现每立方英寸 91 瓦, 在手机适配器情况下则可 实现每立方英寸 31 瓦。 右图是在 65 千赫 区域内采用 QR 反激式 架构和在高于 200 千赫区域内采用 ACF 架构的 65 瓦适配器的 物理尺寸比较。 该设计表明, ACF 适配器的体积 显著减小,其峰值 效率可达 94%。 除了 65 瓦的 设计之外,我们 还需要对开关频率 高于 200 千赫的 45 瓦适配器 进行效率比较。 由于占主导 地位的开关 损耗和箝位损耗, 随着输入线路 电压的增加, 具有流畅增压 MOSFET 的 QR 反激式的 整体效率会变差。 而 ACF 却可以 在宽输入范围内保持 非常高的效率。 试验结果表明, ACF 的效率 比 QR 高 3.6%。 对于高强度考虑, [听不清] 器件 可以在宽输入范围内 实现高于 94% 的效率, 因为 GaN 器件采用的是 比硅器件中小得多的 判断电容。 ZVS 需要较小的 [听不清] 电流, 我们应该降低 峰值最小电流。 变压器的 [听不清] 和 [听不清] 损耗降低, 从而可实现更高的 效率,并导致 GaN 和硅器件之间 出现 1% 的效率差距。 这是 ACF 的主要 [听不清] 电流波形, 其中有一个部分是未激活的。 有争议的是, 这是 CCM 还是转换模式。 以下是我的个人看法。 从一个小的方面 来看,主要 [听不清] 电流的峰值 仅受峰值环路 控制。 但主要 [听不清] 电流不受 另一个 [听不清] 控制。 这个小信号属性 与 CCM 类似。 CCM 类模式的 裸电流大小的 确定方式为: 利用内部固定频率 时钟关闭 高置开关, 然后在相应 日期/时间之后 开始下一个开关周期。 大多数商用 ACF 控制器 都是基于这种运行模式, 包括 TS 传统 ACF 控制器 UCC289x。 另一方面,它具有 抵抗性内核控制, 包括峰值电流 环路和谷电流 环路。 所以,这个 小信号属性 与转换运行模式类似。 具体来说, 负主要 [听不清] 电流的大小 由谷值电流 环路独立调节。 这个开关 频率是可变的。 我们的全新控制器 UCC28780 是行业领先的 ACF 控制器,采用了 抵抗性内核控制的概念。 在下一张幻灯片中, 我会对 CCM 和转换 运行模式的小信号 特性进行比较。 这是基于 CCM 运行 模式的 UCC289x 的示意图。 上电压反馈环路的 控制电压 VCST 会控制峰值 主要 [听不清] 电流,所以电流感测 电阻器 RCS 在低侧 开关上。 对于反馈 环路补偿, 了解 VCST 到 上 40s 的传递函数 对补偿设计 有重要意义。 右侧显示了 CCM 运行 模式下的波德图。 您可以看到, 除了低频极点和 上电容器的 ESR 零点, 还有一个导致了 93 个相位的 延迟的右半平面零点。 开关频率的 中点处还有 一个双极点, 它引入了 另外 180 度的首次延迟。 这些强烈的首次延迟 将会对高容量设计 造成限制,因此, 为了满足负载传送需求, 需要使用 较大的上电容。 除此之外,为了减小 中点 [听不清] 频率 双极点,以防止 电流环路的 不稳定, 当占空比 大于 50% 时 需要进行 斜率补偿, 这使环路补偿进一步 复杂化。 这是基于 转换运行 模式的 UCC28780 的 示意图, 它包括峰值电流 环路和仿真谷值 电流环路。 峰值电流环路 控制从电流感测 电阻器 RCS 发送而来的 峰值主要 [听不清] 电流。 谷值电流 环路则通过 控制器中的自适应 ZVS 控件来控制 [听不清] 主要 [听不清] 电流。 该环路确定开关 节点电压 VSW 上的 ZVS 条件,以调整 高侧开关的导通时间 宽度。 小信号特性表明, 右平面零点和中点 [听不清] 开关频率 双极点消失了。 所以补偿设计 变得非常简单。 此外,消除 这些相位延迟 会导致具有足够相位 裕度的较高 [听不清] 设计。 最后,由于 当占空比 大于 50% 时, 电流环路没有 稳定性问题, 所以不需要 斜率补偿。 下一步需要 通过解析式的 模型表达式来指导 环路补偿。 然而,由于 次级侧上 ACF 开关电流 波形的相关性, 很难用解析 方法表征其 小信号特性。 我将向您展示 一种简单的典型建模 技术,它可以消除 谐振波形描述的 复杂性。 首先,可以合理地 将主要 [听不清] 电流 波形近似为 以深红色表示的 三角波形。 然后,低侧 开关上的开关 电流波形 I_QL 以蓝色表示, 包含主要 [听不清] 电流的中点信息。 这样,用一阶 公式来描述 I_QL 的 平均值就简单了许多, 如该公式所示。 其次,由于 I_QL 的实际值 也是 ACF 转换器的 平均输入电流, 因此可以根据 能量守恒定律 获得次级侧中 上电流的平均值。 然后,为了获得 小信号属性, 在转换器的 平衡点上 计算扰动 信号的偏导数。 最后,便可获得 小信号分析的等效 电路模型。 如您所见, 控制电压 V_CST 通过对电压 控制电流源 进行调幅 来调节上电压, 该电压会流经 上电容分支, 是电源转换器的 小信号 表示。 利用提出的模型, 可以导出 从 V_CST 到 上电压的传递函数的 解析表达式。 该表中总结了 这些参数。 右图比较了 传递函数和 简化比率 结果的波德图。 该模型提供了 高达开关频率的 四分之一的 非常精确的结果, 足以指导 环路补偿, 并验证了转换运行 模式下的 ACF 的 小信号属性。 现在,我们来看一下 ACF 中作为轻负载 运行模式的突发模式。 随着输出负载减小, 负最小电流 i_m- 保持不变, 正峰值电流 i_m+ 变小。 正峰值电流用于 向输出端传递 有源能量, 而负电流 则存储单独的能量 以实现 ZVS。 即随着负载变小, 正峰值电流和 负电流的幅度 越来越接近。 这意味着, 由于循环 能量的贡献 越来越大, 变压器效率 越来越差。 对于光滑的 ACF, 由于即将出现的电容, 高线处的裸电流较大。 随着输出 负载减小, 负电流影响 变得更加显著, 因此与扫描 ACF 相比, 效率会非常 迅速地恶化。 对硅 ACF 的 测量结果表明, 50% 负载 和 25% 负载的 效率差可达 7.3%。 而对于 GaN ACF, 由于它的低结电容, 负电流要比硅 ACF 小得多。 并且负载变得更小, 负电流影响 更小。 您可以看到, 50% 负载和 25% 负载 之间的效率差异仅为 2.6%。 ACF 理想轻载模式的 最关键要求是 将正峰值电流 保持在相对于 负电流来说 较高的水平。 UCC28780 采用突发模式 控制来提高轻载 效率。 正峰值电流 由 [听不清] 编程, 以克服最小电流 对效率的影响。 在本示例中, 每个突发数据包 有四个开关极点。 突发时间 随上载条件变化。 左侧显示了 控制低点。 当循环利用 该环路时, 峰值电流 会越来越低, 最终达到 可编程的阈值 并进入突发模式。 在这种情况下,由于突发 开始于非常轻的负载, 效率会下降太多。 为了提高效率, 通过电阻 分压器的较高 [听不清] 电压 会设置较高的峰值端 阈值,因此转换器 在较重的负载条件下 进入突发模式。 这样便可以显著 提高轻负载效率。 这张幻灯片 显示了用 UCC28780 控制的 45 瓦 GaN ACF 设计的效率测试结果。 当 ACF 在低于 60% 负荷下 进入突发模式后, 效率下降 趋于平缓, 平均效率显著 高于 COC 和 理论标准。 这张幻灯片说明了 基本突发模式控制的 控制环路设计。 将来自上电压 反馈环路的反馈 信号 I_FB 与阈值 I_REF 进行比较,以确定 突发数据包的开始。 计数器会 确定突发 数据包结束时 突发模式下的 开关周期的数量。 逻辑 [听不清] 信号 会反映计时的突发。 当两个信号相交时, RUN 处于高位, 这允许有限数量的 开关脉冲, 因为仿真 结果表明 纹波和反馈 信号 I_FB 参与上电压调节, 所以纹波质量会影响 突发模式控制。 下面的幻灯片 将介绍用于 稳定突发模式 控制的波纹 补偿技术。 由于反馈信号 I_FB 的纹波成分 会影响控制低位, 因此反馈信号 与上电压信号 之间的突发 频率纹波的 脉冲延迟必须 尽可能小, 以便反馈信号 反映上电压的 实时纹波成分。 否则,您将看到 一个现象,即每两个 突发周期, 两组突发数据包 便会出现在一起, 且具有非常短和非常 长的突发时间, 并且可能产生最佳 噪声频率。 为了解决这个问题, 需要通过适当的 补偿来将反馈环路中的 突发延迟最小化。 左图显示了 初级侧和次级侧 之间的反馈 环路电路。 次级侧由 [听不清] 并联稳压器 ATO、旁路 稳压器 R_BIAS1 以及 与 R_BIAS1、Rdiff 和 Cdiff 并联的 RC 网络组成。 它们将上电压 信号转换为流经 光耦合器输入 [听不清] 的误差 电流信号。 光耦合器通过 误差电流信号 输出到主控制器 以进行上电压调节。 在这个信号链中, 光耦合器的 [听不清] 和输出会引入 低频相位延迟, 该延迟在 [听不清] 突发域中表示为 单个极点。 为了克服光耦合器的 相位延迟, 转换器上的单个零点 被放置在靠近 极点的位置,希望通过 电路图中的 Rdiff 和 Cdiff 实现该目的。 在正确设计 推荐的无源纹波 补偿后, 在使用电解 上电容器时, 可在突发数据包中 使用稳定的 开关 [听不清] 来稳定突发 控制环路。 电解电容器包含 较大的等效串联 电阻 ESR。 但是聚合物或陶瓷 电容器的 ESR 要低得多。 较小的 ESR 可减小上电压纹波。 但是,它会给 依赖于良好纹波 质量的突发 运行模式带来 不利影响。 最后,即使补偿 设计是正确的,也可能 由于 [听不清] 噪声造成突发 运行模式仍然 不是很稳定。 不仅是单个 上电容器的 ESR 效应, 这种全滤波器 设计的差异 还会影响反馈 信号的纹波质量。 若将采用单个 上电容器与采用 π上滤波器的 ACF 的 突发纹波波形进行比较, 它们的波纹成分 会有很大差异。 单电容器设计 包括高频开关 纹波和低频 突发纹波。 而 π 上滤波器 设计不仅包括 开关和突发纹波, 而且包括由于 上电感器 L_o 和 上电容器 C_01 之间的谐振 而导致的附加振铃。 当这种 [听不清] 波纹被用作 突发模式控制的 波纹信号时, 振铃可以很容易地 过早触发下一个 突发数据包 并导致分组 策略效应。 为了解决这个 问题,必须使反馈 信号的不良 波纹成分远离 波纹比较器的 参考阈值, 以便能够消除 低 ESR 上电容器中的 噪声或 π 上滤波器中的 振铃的影响。 我们提出的 电路级解决方案 称为有源纹波 补偿,缩写为 ARC。 ARC 电路位于 主控制器的 反馈引脚处。 进入控制器的 总反馈电流信号 是光耦合器 电流与来自 ARC 电路的 补偿电流的和。 直观的理解是, 使用 ARC 电路的 干净的人工纹波, 以压倒光耦合器的 噪声纹波,从而 使突降低发控制环路 对噪声的敏感性。 具体来说, 是由简单的开关 电阻网络产生的 干净人工纹波。 开关的开/关计时 与来自我们 控制器的 RUN 引脚电压的 突发开/关信号同步。 当 RUN 引脚处于 高电压且 ARC 开关 Q_COMP 处于导通 状态时,将向 补偿电阻器 R_COMP 施加反馈电压。 因此,会根据 欧姆定律产生 补偿电流 I_COMP。 在计时图中, I_COMP 是一个偏移信号。 它与光耦合器 电流 I_OPTO 叠加, 所以 [听不清] 反馈电流 I_FB 也会出现偏移。 在突发数据包中 产生三个连续的 开关脉冲后, 突发控制环路 会停止开关, RUN 电压变为 低位状态。 当 RUN 引脚电压为零伏时, Q_COMP 关闭。 判断电容 Q_COMP 和 R_COMP 电阻器 会从 RC 时间 常数产生一个 时间延迟,最大值 I_COMP 逐渐减小。 补偿信号 I_COMP 的 偏移和共享 折叠时间 有助于使光耦合器 电流的不良 波纹成分远离 基准信号, 从而避免过早 触发下一个 突发数据组, 同时实现稳定的突发 运行。 这张幻灯片显示了 具有低 ESR 输出 电容器的 ACF 的 ARC 电路的有效性。 没有 ARC 电路时, 较低的上纹波 会使突发模式 对噪声非常敏感。 在应用 ARC 电路之后, 干净的人工 纹波会压倒噪声, 并实现稳定的 突发运行。 这张幻灯片显示了 具有 π 上滤波器的 ACF 的 ARC 电路的性能。 没有 ARC 电路时, L_O 与 C_01 之间的谐振引起的 上纹波的振铃 会使突发模式 对噪声非常敏感。 在应用 ARC 电路后, 干净的人工纹波 克服了振铃效应, 并导致稳定的突发 运行。 在本设计中, 除了 ARC 电路外, 还有一个串联 阻尼网络与 上电感器并联, 以解决 ACF [听不清] 滤波器的另一个问题。 我们将在下一部分中 详细讨论这一点。 我们首先来看看 突发模式期间脉冲级 波形上发生的情况。 从概念角度来看,当 ACF 包含 π 上部滤波器时, 谐振槽将不仅 包含箝位电容器, 而且还包含 π 上滤波器中的 滤波器电容器 C_01。 因此,当谐振 开始时, 两个电容器 之间的电压差 将极大地影响 初级侧和次级侧的 谐振波形。 例如,如果 初始箝位电压 条件高于 反射的 C_01 电压, 则在谐振期间 会有更多最小 电流流经 第二 [听不清]。 相反,如果初始 C 钳位电压条件 低于反射的 C_01 电压, 则在谐振期间 会有更多最小 电流转回初级 钳位电路, 从而为 C 钳位充电。 突发数据包期间的 不平衡电流 会导致每个开关 周期中出现非常不一致的 谐振电流幅度。 即使突发频率 仍然高于 可听噪声频率, 但不一致的 谐振电流仍然 包含低频谐波, 从而产生 可听噪声。 另一个问题是, 当开关电流不平衡时, 单个整流器的 运行将非常 不稳定,并导致 效率下降。 为了解决这个问题, 我们建议使用 C [听不清]。 本幻灯片说明了 ACF 脉冲级 小信号电流 电路的电压控制 电流源流到上场 支路时的频域 串联阻尼效应。 L_O 和 C_01 在自谐振频率处 产生高耦合峰值。 当串联阻尼 网络与主电感 并联时, 双峰现象 将被抑制。 降低其频率 范围内的峰值的 物理意义在于, 纹波成分不会被放大, 这有利于 C 钳位电压和 反射的 C_01 电压 之间的 [听不清] 时域电压差。 我推导出了 阻尼比的表达式。 可以看出, 阻尼电感越低, 阻尼越强。 但是,任何东西都具有两面性。 过强的阻尼 仅仅是通过 零阻尼网络便会 耗费更多的交流开关电流, 并导致 [听不清] 低位时的功率损耗。 对于 45 瓦的 ACF 设计, 如果阻尼电感 为主电感器的 1/10 左右, 则低线效率 将下降 0.5%。 但是,如果 阻尼电感 高于主电感器的1/10, 则交流电流将流经 网络,并导致较少的 功率损耗。 对于 45 瓦的 ACF 设计, 如果阻尼电感 为 0.68 微亨, 主电感为 1 微亨, 则效率仅会 下降 0.15%。 问题是如何 确定阻尼强度。 这张幻灯片 举例说明了如何 选择阻尼强度。 其中的设计技巧是, 您可以逐渐 减小阻尼电感, 直到发现谐振 电路波形得到 改善且 [听不清] 整流器的 GaN 电压 开始在每个开关 周期中提供一致的 控制信号。 我们发现, 对于 1 微亨 输出 [听不清], 0.68 微亨的弱阻尼 设计就足够了。 此外,此测量 波形还证明, 零阻尼下 频域中的 [听不清] 减小了 双峰效应, C_01 的上纹波降低。 然后两个电容 电压的差距变小, 从而在每个 开关周期中 产生更一致的 谐振电流幅度。 这张幻灯片为您 提供了示例选择指南。 有趣的是, 阻尼电感器尺寸 要比主电感器 小得多, 并且类似于 1206 电容器。 此外,由于电感器的 绕组电阻可以是 一个自由 阻尼电阻器, 因此实际实施中的 阻尼网络只有一个 组件。 让我们总结一下我们在 本次中所讨论的内容。 首先,论证了 采用 TI 新型 TCF 芯片组的 ACF 的 效率优势,并与工作 频率高于 130 千赫的 高密度 45 瓦适配器上的 QR 反激式进行了比较。 其次,提出了一种 独特的 ACF 小信号 建模技术。 比较了连续 导通模式和 转换模式下的 独特 [听不清] 特性。 第三,展示了 ACF 在突发模式下的轻负载 效率优势。 并且强调了 稳定性和 SR 运行 问题。 最后,介绍了 两种纹波补偿技术和 串联阻尼方法, 它们可以有效地 稳定突发控制 环路和 SR 运行。 我的演示到此结束。 非常感谢。 554
大家好!
我叫 Pei-Hsin Liu。
我是一名 [听不清] 在线 高电压控制器助理
工程师。
本次演示的主题是 揭开有源钳位
反激式环路补偿的 神秘面纱。
本部分涵盖了针对 ACF 的转换模式
和 CCM 模式进行的 小信号属性分析。
第二,我们会介绍 ACF 的突发运行
模式的优势和 稳定性问题。
第三,我们将基于 分析模型和两种
可用于稳定突发 控制环路的
简单纹波补偿方法, 给出相关设计
准则。
适用的终端 设备包括
高密度交流 适配器或充电器、
USB 供电充电器以及 交流/直流或直流/直流
辅助电源。
本演示可分为 五个部分。
首先,我们将 讨论电流模式
控制的 ACF 的 小信号模型。
其次,我们将介绍作为 ACF 轻负载运行模式的
突发模式。
第三,我们将描述用于 稳定突发模式控制的
纹波补偿。
然后对带 π 输出 滤波器的 ACF 的串联
阻尼进行说明, 最后总结本节课
学习的内容。
这些幻灯片将会介绍 为什么有源钳位反激式
ACF 可提供 大大优于
传统准谐振 反激式 QR 的性能。
高速钳位电路 通过二极管
以及 [听不清] TVS 或 R-C 缓冲器
进行整流,[听不清], 广泛应用于我们的
反激式 [听不清] 中,
[听不清]。
但是,却浪费了 [听不清] 能量。
并且这种功率 损耗会降低效率。
其次,在打开 [听不清] 开关的情况下,
如果您打开 [听不清], 则仍会出现开关
过热的情况。
PC 的第一个 分支 [听不清],
发生一定程度的开关损耗。
第三,在 [听不清] 停止后,[听不清]
和判断电容将产生 高摩擦 [听不清]
并影响 EMI。
而有源钳位
反激式 ACF 则是 由有源高侧
开关 Q 边缘构成, 可通过 [听不清] C
钳位来消除 这些不利因素,
尤其是打开 QH, 找到 [听不清] 电容器中的
驻留路径 [听不清], 从而使潜伏的能量
根据我们的状态循环流动到输出端。
如果 QH 保持开启 状态,可能不会
流过的电流 将变成第一反应。
在 Q_H 关闭后, 非激活部分
可用于通过停止 使该判断电容
在开关节点上进行放电。
打开 QL 后, 谐振到 0 伏。
在达到零伏时, 便实现了 ZVS。
此外,由于初级 电流是连续的
波形,所以没有 像基本钳位
那样的高频 [听不清], 这有利于 EMI 功能。
此图表总结了 不同功率水平下的
反激功率密度。
对于 15 瓦的手机充电器, 反激式上的 RHQ 状态
仅为每立方 英寸 9 瓦。
对于 45 瓦、 65 瓦和没有
适配器的情况,QR 反激式 已经达到了低于每立方英寸
11 瓦的功率密度限制。
为了满足大幅 减小体积的需求,
我们的团队开发了 ACF 支持构建
控制器。
一个是行业首创的 [听不清] 上频 ACF
控制器 UCC28780,一个是 全新 SR 控制器 UCC24612,
二者均可支持初级 增益和开关功率级,
并能够提供 1 兆赫的工作频率。
使用的参考 设计可确保
我们的解决 方案在 27 瓦的
USBCPD 手机充电器上 实现每立方英寸 91 瓦,
在手机适配器情况下则可 实现每立方英寸 31 瓦。
右图是在 65 千赫 区域内采用
QR 反激式 架构和在高于
200 千赫区域内采用 ACF 架构的 65 瓦适配器的
物理尺寸比较。
该设计表明, ACF 适配器的体积
显著减小,其峰值 效率可达 94%。
除了 65 瓦的 设计之外,我们
还需要对开关频率 高于 200 千赫的
45 瓦适配器 进行效率比较。
由于占主导 地位的开关
损耗和箝位损耗, 随着输入线路
电压的增加, 具有流畅增压
MOSFET 的 QR 反激式的 整体效率会变差。
而 ACF 却可以 在宽输入范围内保持
非常高的效率。
试验结果表明, ACF 的效率
比 QR 高 3.6%。
对于高强度考虑, [听不清] 器件
可以在宽输入范围内 实现高于 94% 的效率,
因为 GaN 器件采用的是 比硅器件中小得多的
判断电容。
ZVS 需要较小的 [听不清] 电流,
我们应该降低 峰值最小电流。
变压器的 [听不清] 和 [听不清] 损耗降低,
从而可实现更高的 效率,并导致
GaN 和硅器件之间 出现 1% 的效率差距。
这是 ACF 的主要 [听不清] 电流波形,
其中有一个部分是未激活的。
有争议的是, 这是 CCM 还是转换模式。
以下是我的个人看法。
从一个小的方面 来看,主要 [听不清]
电流的峰值 仅受峰值环路
控制。
但主要 [听不清] 电流不受
另一个 [听不清] 控制。
这个小信号属性 与 CCM 类似。
CCM 类模式的 裸电流大小的
确定方式为: 利用内部固定频率
时钟关闭 高置开关,
然后在相应 日期/时间之后
开始下一个开关周期。
大多数商用 ACF 控制器
都是基于这种运行模式, 包括 TS 传统 ACF
控制器 UCC289x。
另一方面,它具有 抵抗性内核控制,
包括峰值电流 环路和谷电流
环路。
所以,这个 小信号属性
与转换运行模式类似。
具体来说, 负主要 [听不清]
电流的大小 由谷值电流
环路独立调节。
这个开关 频率是可变的。
我们的全新控制器 UCC28780 是行业领先的 ACF
控制器,采用了 抵抗性内核控制的概念。
在下一张幻灯片中, 我会对 CCM 和转换
运行模式的小信号 特性进行比较。
这是基于 CCM 运行 模式的 UCC289x 的示意图。
上电压反馈环路的 控制电压 VCST
会控制峰值 主要 [听不清]
电流,所以电流感测 电阻器 RCS 在低侧
开关上。
对于反馈 环路补偿,
了解 VCST 到 上 40s 的传递函数
对补偿设计 有重要意义。
右侧显示了 CCM 运行 模式下的波德图。
您可以看到, 除了低频极点和
上电容器的 ESR 零点,
还有一个导致了 93 个相位的
延迟的右半平面零点。
开关频率的 中点处还有
一个双极点, 它引入了
另外 180 度的首次延迟。
这些强烈的首次延迟 将会对高容量设计
造成限制,因此, 为了满足负载传送需求,
需要使用 较大的上电容。
除此之外,为了减小 中点 [听不清] 频率
双极点,以防止 电流环路的
不稳定, 当占空比
大于 50% 时 需要进行
斜率补偿, 这使环路补偿进一步
复杂化。
这是基于 转换运行
模式的 UCC28780 的 示意图,
它包括峰值电流 环路和仿真谷值
电流环路。
峰值电流环路 控制从电流感测
电阻器 RCS 发送而来的 峰值主要 [听不清]
电流。
谷值电流 环路则通过
控制器中的自适应 ZVS 控件来控制
[听不清] 主要 [听不清] 电流。
该环路确定开关 节点电压 VSW 上的
ZVS 条件,以调整 高侧开关的导通时间
宽度。
小信号特性表明,
右平面零点和中点
[听不清] 开关频率 双极点消失了。
所以补偿设计 变得非常简单。
此外,消除 这些相位延迟
会导致具有足够相位 裕度的较高 [听不清]
设计。
最后,由于 当占空比
大于 50% 时, 电流环路没有
稳定性问题, 所以不需要
斜率补偿。
下一步需要 通过解析式的
模型表达式来指导 环路补偿。
然而,由于 次级侧上 ACF
开关电流 波形的相关性,
很难用解析 方法表征其
小信号特性。
我将向您展示 一种简单的典型建模
技术,它可以消除 谐振波形描述的
复杂性。
首先,可以合理地 将主要 [听不清] 电流
波形近似为 以深红色表示的
三角波形。
然后,低侧 开关上的开关
电流波形 I_QL 以蓝色表示,
包含主要 [听不清] 电流的中点信息。
这样,用一阶 公式来描述 I_QL 的
平均值就简单了许多, 如该公式所示。
其次,由于 I_QL 的实际值
也是 ACF 转换器的 平均输入电流,
因此可以根据 能量守恒定律
获得次级侧中 上电流的平均值。
然后,为了获得 小信号属性,
在转换器的 平衡点上
计算扰动 信号的偏导数。
最后,便可获得 小信号分析的等效
电路模型。
如您所见, 控制电压 V_CST
通过对电压 控制电流源
进行调幅 来调节上电压,
该电压会流经 上电容分支,
是电源转换器的 小信号
表示。
利用提出的模型, 可以导出
从 V_CST 到 上电压的传递函数的
解析表达式。
该表中总结了 这些参数。
右图比较了 传递函数和
简化比率 结果的波德图。
该模型提供了 高达开关频率的
四分之一的 非常精确的结果,
足以指导 环路补偿,
并验证了转换运行 模式下的 ACF 的
小信号属性。
现在,我们来看一下 ACF 中作为轻负载
运行模式的突发模式。
随着输出负载减小, 负最小电流
i_m- 保持不变,
正峰值电流 i_m+ 变小。
正峰值电流用于 向输出端传递
有源能量, 而负电流
则存储单独的能量 以实现 ZVS。
即随着负载变小,
正峰值电流和 负电流的幅度
越来越接近。
这意味着, 由于循环
能量的贡献 越来越大,
变压器效率 越来越差。
对于光滑的 ACF, 由于即将出现的电容,
高线处的裸电流较大。
随着输出 负载减小,
负电流影响 变得更加显著,
因此与扫描 ACF 相比, 效率会非常
迅速地恶化。
对硅 ACF 的 测量结果表明,
50% 负载 和 25% 负载的
效率差可达 7.3%。
而对于 GaN ACF,
由于它的低结电容, 负电流要比硅 ACF
小得多。
并且负载变得更小, 负电流影响
更小。
您可以看到, 50% 负载和 25% 负载
之间的效率差异仅为 2.6%。
ACF 理想轻载模式的 最关键要求是
将正峰值电流 保持在相对于
负电流来说 较高的水平。
UCC28780 采用突发模式 控制来提高轻载
效率。
正峰值电流 由 [听不清] 编程,
以克服最小电流 对效率的影响。
在本示例中, 每个突发数据包
有四个开关极点。
突发时间 随上载条件变化。
左侧显示了 控制低点。
当循环利用 该环路时,
峰值电流 会越来越低,
最终达到 可编程的阈值
并进入突发模式。
在这种情况下,由于突发 开始于非常轻的负载,
效率会下降太多。
为了提高效率, 通过电阻
分压器的较高 [听不清] 电压
会设置较高的峰值端 阈值,因此转换器
在较重的负载条件下 进入突发模式。
这样便可以显著 提高轻负载效率。
这张幻灯片 显示了用 UCC28780
控制的 45 瓦 GaN ACF 设计的效率测试结果。
当 ACF 在低于 60% 负荷下 进入突发模式后,
效率下降 趋于平缓,
平均效率显著
高于 COC 和 理论标准。
这张幻灯片说明了 基本突发模式控制的
控制环路设计。
将来自上电压 反馈环路的反馈
信号 I_FB 与阈值 I_REF
进行比较,以确定 突发数据包的开始。
计数器会 确定突发
数据包结束时 突发模式下的
开关周期的数量。
逻辑 [听不清] 信号 会反映计时的突发。
当两个信号相交时, RUN 处于高位,
这允许有限数量的 开关脉冲,
因为仿真 结果表明
纹波和反馈 信号 I_FB
参与上电压调节,
所以纹波质量会影响 突发模式控制。
下面的幻灯片 将介绍用于
稳定突发模式
控制的波纹 补偿技术。
由于反馈信号 I_FB 的纹波成分
会影响控制低位,
因此反馈信号 与上电压信号
之间的突发 频率纹波的
脉冲延迟必须 尽可能小,
以便反馈信号 反映上电压的
实时纹波成分。
否则,您将看到 一个现象,即每两个
突发周期, 两组突发数据包
便会出现在一起, 且具有非常短和非常
长的突发时间, 并且可能产生最佳
噪声频率。
为了解决这个问题, 需要通过适当的
补偿来将反馈环路中的 突发延迟最小化。
左图显示了 初级侧和次级侧
之间的反馈 环路电路。
次级侧由 [听不清] 并联稳压器
ATO、旁路
稳压器 R_BIAS1 以及 与 R_BIAS1、Rdiff 和
Cdiff 并联的 RC 网络组成。
它们将上电压 信号转换为流经
光耦合器输入 [听不清] 的误差
电流信号。
光耦合器通过 误差电流信号
输出到主控制器 以进行上电压调节。
在这个信号链中, 光耦合器的
[听不清] 和输出会引入 低频相位延迟,
该延迟在 [听不清] 突发域中表示为
单个极点。
为了克服光耦合器的 相位延迟,
转换器上的单个零点 被放置在靠近
极点的位置,希望通过 电路图中的 Rdiff 和 Cdiff
实现该目的。
在正确设计 推荐的无源纹波
补偿后, 在使用电解
上电容器时, 可在突发数据包中
使用稳定的 开关 [听不清]
来稳定突发 控制环路。
电解电容器包含 较大的等效串联
电阻 ESR。
但是聚合物或陶瓷 电容器的 ESR 要低得多。
较小的 ESR 可减小上电压纹波。
但是,它会给 依赖于良好纹波
质量的突发 运行模式带来
不利影响。
最后,即使补偿 设计是正确的,也可能
由于 [听不清] 噪声造成突发
运行模式仍然 不是很稳定。
不仅是单个 上电容器的 ESR 效应,
这种全滤波器 设计的差异
还会影响反馈 信号的纹波质量。
若将采用单个 上电容器与采用
π上滤波器的 ACF 的 突发纹波波形进行比较,
它们的波纹成分 会有很大差异。
单电容器设计 包括高频开关
纹波和低频 突发纹波。
而 π 上滤波器 设计不仅包括
开关和突发纹波,
而且包括由于 上电感器 L_o 和
上电容器 C_01 之间的谐振
而导致的附加振铃。
当这种 [听不清] 波纹被用作
突发模式控制的 波纹信号时,
振铃可以很容易地 过早触发下一个
突发数据包 并导致分组
策略效应。
为了解决这个 问题,必须使反馈
信号的不良 波纹成分远离
波纹比较器的 参考阈值,
以便能够消除 低 ESR 上电容器中的
噪声或 π 上滤波器中的
振铃的影响。
我们提出的 电路级解决方案
称为有源纹波 补偿,缩写为 ARC。
ARC 电路位于 主控制器的
反馈引脚处。
进入控制器的 总反馈电流信号
是光耦合器 电流与来自
ARC 电路的 补偿电流的和。
直观的理解是,
使用 ARC 电路的 干净的人工纹波,
以压倒光耦合器的 噪声纹波,从而
使突降低发控制环路 对噪声的敏感性。
具体来说, 是由简单的开关
电阻网络产生的 干净人工纹波。
开关的开/关计时 与来自我们
控制器的 RUN 引脚电压的 突发开/关信号同步。
当 RUN 引脚处于 高电压且 ARC 开关
Q_COMP 处于导通 状态时,将向
补偿电阻器 R_COMP 施加反馈电压。
因此,会根据 欧姆定律产生
补偿电流 I_COMP。
在计时图中, I_COMP 是一个偏移信号。
它与光耦合器 电流 I_OPTO 叠加,
所以 [听不清] 反馈电流 I_FB
也会出现偏移。
在突发数据包中 产生三个连续的
开关脉冲后,
突发控制环路 会停止开关,
RUN 电压变为 低位状态。
当 RUN 引脚电压为零伏时, Q_COMP 关闭。
判断电容 Q_COMP 和 R_COMP 电阻器
会从 RC 时间 常数产生一个
时间延迟,最大值 I_COMP 逐渐减小。
补偿信号 I_COMP 的
偏移和共享 折叠时间
有助于使光耦合器 电流的不良
波纹成分远离 基准信号,
从而避免过早 触发下一个
突发数据组, 同时实现稳定的突发
运行。
这张幻灯片显示了 具有低 ESR 输出
电容器的 ACF 的 ARC 电路的有效性。
没有 ARC 电路时, 较低的上纹波
会使突发模式 对噪声非常敏感。
在应用 ARC 电路之后,
干净的人工 纹波会压倒噪声,
并实现稳定的 突发运行。
这张幻灯片显示了 具有 π 上滤波器的
ACF 的 ARC 电路的性能。
没有 ARC 电路时, L_O 与 C_01
之间的谐振引起的 上纹波的振铃
会使突发模式 对噪声非常敏感。
在应用 ARC 电路后, 干净的人工纹波
克服了振铃效应, 并导致稳定的突发
运行。
在本设计中, 除了 ARC 电路外,
还有一个串联 阻尼网络与
上电感器并联, 以解决 ACF [听不清]
滤波器的另一个问题。
我们将在下一部分中 详细讨论这一点。
我们首先来看看 突发模式期间脉冲级
波形上发生的情况。
从概念角度来看,当 ACF 包含 π 上部滤波器时,
谐振槽将不仅 包含箝位电容器,
而且还包含 π 上滤波器中的
滤波器电容器 C_01。
因此,当谐振 开始时,
两个电容器 之间的电压差
将极大地影响 初级侧和次级侧的
谐振波形。
例如,如果 初始箝位电压
条件高于
反射的 C_01 电压,
则在谐振期间 会有更多最小
电流流经 第二 [听不清]。
相反,如果初始 C 钳位电压条件
低于反射的 C_01 电压,
则在谐振期间 会有更多最小
电流转回初级 钳位电路,
从而为 C 钳位充电。
突发数据包期间的 不平衡电流
会导致每个开关 周期中出现非常不一致的
谐振电流幅度。
即使突发频率 仍然高于
可听噪声频率, 但不一致的
谐振电流仍然 包含低频谐波,
从而产生 可听噪声。
另一个问题是, 当开关电流不平衡时,
单个整流器的 运行将非常
不稳定,并导致 效率下降。
为了解决这个问题, 我们建议使用 C [听不清]。
本幻灯片说明了 ACF 脉冲级
小信号电流 电路的电压控制
电流源流到上场 支路时的频域
串联阻尼效应。
L_O 和 C_01 在自谐振频率处
产生高耦合峰值。
当串联阻尼 网络与主电感
并联时,
双峰现象 将被抑制。
降低其频率 范围内的峰值的
物理意义在于, 纹波成分不会被放大,
这有利于 C 钳位电压和
反射的 C_01 电压 之间的 [听不清]
时域电压差。
我推导出了 阻尼比的表达式。
可以看出, 阻尼电感越低,
阻尼越强。
但是,任何东西都具有两面性。
过强的阻尼 仅仅是通过
零阻尼网络便会 耗费更多的交流开关电流,
并导致 [听不清] 低位时的功率损耗。
对于 45 瓦的 ACF 设计, 如果阻尼电感
为主电感器的 1/10 左右,
则低线效率 将下降 0.5%。
但是,如果 阻尼电感
高于主电感器的1/10,
则交流电流将流经 网络,并导致较少的
功率损耗。
对于 45 瓦的 ACF 设计, 如果阻尼电感
为 0.68 微亨, 主电感为 1 微亨,
则效率仅会 下降 0.15%。
问题是如何 确定阻尼强度。
这张幻灯片 举例说明了如何
选择阻尼强度。
其中的设计技巧是, 您可以逐渐
减小阻尼电感, 直到发现谐振
电路波形得到 改善且 [听不清]
整流器的 GaN 电压
开始在每个开关 周期中提供一致的
控制信号。
我们发现, 对于 1 微亨
输出 [听不清], 0.68 微亨的弱阻尼
设计就足够了。
此外,此测量 波形还证明,
零阻尼下 频域中的
[听不清] 减小了 双峰效应,
C_01 的上纹波降低。
然后两个电容 电压的差距变小,
从而在每个 开关周期中
产生更一致的 谐振电流幅度。
这张幻灯片为您 提供了示例选择指南。
有趣的是, 阻尼电感器尺寸
要比主电感器 小得多,
并且类似于 1206 电容器。
此外,由于电感器的 绕组电阻可以是
一个自由 阻尼电阻器,
因此实际实施中的 阻尼网络只有一个
组件。
让我们总结一下我们在 本次中所讨论的内容。
首先,论证了 采用 TI 新型 TCF
芯片组的 ACF 的 效率优势,并与工作
频率高于 130 千赫的 高密度 45 瓦适配器上的
QR 反激式进行了比较。
其次,提出了一种 独特的 ACF 小信号
建模技术。
比较了连续 导通模式和
转换模式下的 独特 [听不清]
特性。
第三,展示了 ACF 在突发模式下的轻负载
效率优势。
并且强调了 稳定性和 SR 运行
问题。
最后,介绍了 两种纹波补偿技术和
串联阻尼方法,
它们可以有效地 稳定突发控制
环路和 SR 运行。
我的演示到此结束。
非常感谢。 554
手机看
扫码用手机观看
 视频简介
视频简介
解除有源钳反激回路补偿的神秘化
所属课程:TI HVI系列培训
发布时间:2018.04.11
视频集数:26
本节视频时长:00:32:26
HVI为TI 美国本土每年一届的系统级电源设计研讨会。在这个研讨会中,TI的高级工程师们将和大家讨论常见的系统级电源设计中的各类问题,并介绍TI最新的创新电源解决方案。 会议讨论的主题涵盖从PFC到隔离式栅极驱动器,包括宽带隙解决方案以及电动汽车(EV)等应用主题。
本系列培训收录了20多个HVI研讨会上的讨论主题,您可以观看并从您感兴趣的主题中学习各种系统级电源设计的解决方案。从功率因数校正(PFC)的基本原理到设计多功率电源系统,请选择您最喜欢的主题,并开始学习吧。



 未学习 深度掌握隔离驱动器瞬态共模噪音抑制及其特性
未学习 深度掌握隔离驱动器瞬态共模噪音抑制及其特性
 未学习 熟练掌握高压MOSFET/IGBT栅极驱动设计
未学习 熟练掌握高压MOSFET/IGBT栅极驱动设计
 未学习 1.1 LLC控制:更快,更强,更好---第一部分
未学习 1.1 LLC控制:更快,更强,更好---第一部分
 未学习 1.2 LLC控制:更快,更强,更好---第二部分
未学习 1.2 LLC控制:更快,更强,更好---第二部分
 未学习 1.3 LLC控制:更快,更强,更好---第三部分
未学习 1.3 LLC控制:更快,更强,更好---第三部分
 未学习 1.4 LLC控制:更快,更强,更好---第四部分
未学习 1.4 LLC控制:更快,更强,更好---第四部分
 未学习 1.1为你的临界模式PFC提供超强动力 - 课程介绍
未学习 1.1为你的临界模式PFC提供超强动力 - 课程介绍
 未学习 1.2为你的临界模式PFC提供超强动力 - PFC以及CRM PFC工作原理
未学习 1.2为你的临界模式PFC提供超强动力 - PFC以及CRM PFC工作原理
 未学习 1.3为你的临界模式PFC提供超强动力 - UCC28056 CRMDCM控制芯片工作原理
未学习 1.3为你的临界模式PFC提供超强动力 - UCC28056 CRMDCM控制芯片工作原理
 未学习 1.4为你的临界模式PFC提供超强动力 - UCC28064 CRM控制芯片工作原理
未学习 1.4为你的临界模式PFC提供超强动力 - UCC28064 CRM控制芯片工作原理
 未学习 1.5为你的临界模式PFC提供超强动力 - 课程总结
未学习 1.5为你的临界模式PFC提供超强动力 - 课程总结
 未学习 设计超高功率密度的小功率AC-DC电源
未学习 设计超高功率密度的小功率AC-DC电源
 未学习 USB type C PD协议设计考量
未学习 USB type C PD协议设计考量
 未学习 如何驱动碳化硅MOSFET以优化高功率系统的性能和可靠性
未学习 如何驱动碳化硅MOSFET以优化高功率系统的性能和可靠性
 未学习 GaN产品应用于可靠和高密度电源的设计
未学习 GaN产品应用于可靠和高密度电源的设计
 未学习 门驱动器设计-从基础到细节
未学习 门驱动器设计-从基础到细节
 未学习 常见门驱动器问题及其解决方法
未学习 常见门驱动器问题及其解决方法
 未学习 高功率密度和高效率适配器的设计考虑-第1部分
未学习 高功率密度和高效率适配器的设计考虑-第1部分
 未学习 高功率密度和高效率适配器的设计考虑-第2部分
未学习 高功率密度和高效率适配器的设计考虑-第2部分
 未学习 解除有源钳反激回路补偿的神秘化
未学习 解除有源钳反激回路补偿的神秘化
 未学习 用GaN设计可靠的高密度功率解决方案-第一部分
未学习 用GaN设计可靠的高密度功率解决方案-第一部分
 未学习 用GaN设计可靠的高密度功率解决方案-第二部分
未学习 用GaN设计可靠的高密度功率解决方案-第二部分
 未学习 掌握高压门驱动器设计的艺术和基础
未学习 掌握高压门驱动器设计的艺术和基础
 未学习 掌握隔离门驱动器的稳健性——CMTI的深入研究
未学习 掌握隔离门驱动器的稳健性——CMTI的深入研究
 未学习 削减待机功耗和系统成本
未学习 削减待机功耗和系统成本
 未学习 什么时候可以同步整流提高效率?
未学习 什么时候可以同步整流提高效率?


























