无刷直流 (BLDC) 电机驱动器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
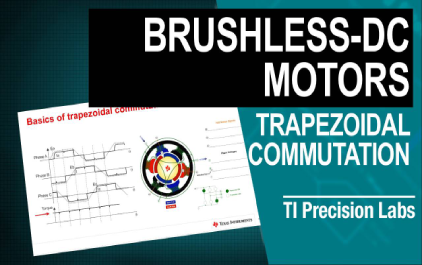
4、梯形换向
大家好,欢迎观看 此无刷直流电机
梯形换向 TI 高精度视频。
在本视频中,我们将讨论 如何使用梯形换向
对 BLDC 电机进行换向、 该方法的优缺点
以及如何使用 有传感器和
无传感器技术 实现该方法。
首先,让我们回顾一下 有关 BLDC 电机
旋转的基础知识。
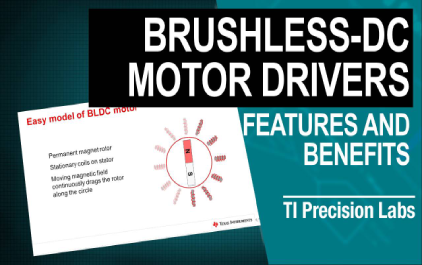
BLDC 电机 由转子和定子组成,
其中定子由线圈 绕组组成,
当电流注入时, 线圈绕组充当电磁体。
转子是永磁体,
其会对定子产生的 磁场做出反应。
激励这些 绕组的过程
需要以可控的 方式进行,
这就是电机驱动器 电子器件发挥作用的地方。
定子中的线圈绕组 将以特定的方式导通,
这将拉动转子,
说到底,就是 使转子追赶
定子产生的磁场。
打开和断开 施加在定子中
这些相绕组的电流 以产生运动的过程
称为电机换向。
在该图中,我们 看到定子中有三相绕组。
当电流从 该定子绕组的
一面流到另一面时, 产生的磁场
会在该磁场方向上拉动转子, 具体取决于其极性。
这将导致 电机旋转。
当电机旋转时, 它会产生
反电动势或电压, 该反电动势或电压
会阻止产生该感应 电压的电流发生变化,
这种反电动势波形 可以是梯形或正弦形,
具体取决于 电机结构。
为了使性能最大化, 驱动电流
应与反电动势 波形匹配。
典型的 BLDC 电机 以梯形方式绕制,
理论上会产生 梯形反电动势波形。
但是,电机中的电感 会使反电动势
平滑为略呈 正弦曲线的形状。
因此,BLDC 电机 可以采用
梯形和正弦 两种方式
进行换向。
为了高效地 进行换向,
需要知道 电机的位置,
以便能够 相应地依次
接通面电流。
这可以使用有传感器 或无传感器技术来实现。
梯形换向因其 简单、成本低和
可靠性好等优点 而广受欢迎。
与正弦和磁场 定向的控制相比,
它是最容易 实现的换向
技术。
它的简单性 降低了设计时间和成本,
特别是在 用于控制算法的处理
能力方面。
它在高速应用 或需要高启动
转矩的应用中 非常常见,
如电动工具、 真空吸尘器、无人机等。
但是,它确实 存在转矩纹波问题。
另一个缺点是其会产生 电气和声学噪声,
这主要来自 为各个相位供电的
快速开关直流电。
这种噪声会使 绕组升温
并降低效率, 同时还会产生
由开关频率 引起的可闻
嗡嗡声。
梯形换向 分为六个步骤,
这就是通常将其称为 六步换向的原因所在。
每个电机端面 端子都由
直流电供电, 电机每旋转 60 度
直流电流切换一次, 因此电流空间
系数连续保持 在正交方向
最近的 30 度内。
因此,每个 相绕组的波形
都是一个阶梯,每个 阶梯具有 60 度窗口,
从零开始, 然后进入
正电流状态, 回到零,然后
再进入负电流状态。
由所有三个面电流 产生的空间矢量
在通过六个步骤 进行换向时
会导致平滑旋转。
原则上,我们希望 通过依次激励
正确的面对 以产生平稳的
恒定转矩来在 BLDC 电机中 产生最大转矩。
在实践中,我们 不能瞬间将面电流
从低电平变为高电平。
将会存在一个 上升和下降时间的
瞬态周期,这些瞬态周期 会在输出端产生纹波,
这将与每个面开关相吻合。
这会对电机的 输出转矩产生纹波。
整个换向过程
可以在右侧看到。
功率状态晶体管 按顺序开关
以使电机换向。
每个半桥 每次激活一侧,
并插入适当的规定时间, 从而避免击穿,
这可能会对系统 造成严重损害。
随着每个 FET 的接通,
电流会根据 转子的位置
注入到每个 电机端子中。
可以使用 霍尔传感器等
传感器技术 或反电动势
电压测量等 无传感器技术
来确定电动机的位置。
为了有效地 实现控制方案,
必须始终知道 电机的位置。
一种流行的 传感器技术
是使用霍尔 效应传感器将信息
反馈给控制器。
霍尔效应传感器 测量转子上的
永磁体产生的磁场。
随着转子永磁体 位置由北向南的变化,
霍尔传感器的 输出状态
也随之变化。
为了使其 正常工作,
必须将霍尔 传感器安装在
特定位置。
单个霍尔传感器 可以将电气周期
分为两个部分。
这导致需要使用 三个霍尔传感器
来获取电气周期的 所有六个位置。
嵌入在电机中的 霍尔器件
可在 60 度扇区内 测量转子的位置,
并检测电机 控制器的数字信号。
如前所述, 在六步换向中的
任何时间点,两个绕组 产生的电流大小相等,
而第三个绕组的 电流为零,
最终会产生六个 不同方向的电流
空间矢量。
我们可以观察一个示例, 说明霍尔效应传感器
如何在电气周期 六种状态的每种状态下
检测来自电机的磁场。
当转子的一个磁极 穿过霍尔传感器时,
它会根据配置不同
产生高态或低态。
当相反的磁极 穿过霍尔传感器时,
它将产生相反的状态。
三个传感器同时 完成此操作
将产生六种状态, 这可以使用
真值表来表示。
所示的真值表显示了 基于转子位置的
每个霍尔传感器的状态。
根据每个步骤的 霍尔传感器的值,
控制器会自动知道 需要为哪些
相绕组通电。
结果是使用霍尔 传感器进行连续换向。
使用霍尔传感器, 即使在电机缓慢旋转
或处于静止状态时, 也可以立即知道
电机位置。
其他类型的传感器 技术包括使用
编码器和旋转变压器。
在 HVAC 和大家电等 许多电机应用中,
使用霍尔效应 传感器并不是
一个成本效益高的 位置检测解决方案,
从而导致采用 无传感器方法来实现。
无传感器方法可以 通过利用电机的
反电动势电压来 检测电机位置,
从而消除物理传感器。
根据法拉第 定律,当导线
穿过磁场时 会产生电动势电压。
当转子旋转时, 每个线圈绕组
都会产生一个 可用于检测位置的
反电动势波形。
此方法常用于 启动和正常运行时
转矩变化小的 泵、风扇
和类似应用。
通过消除外部器件, 该解决方案降低了
成本并 提高了可靠性。
其缺点是转矩稳定性差、 转速低和失速条件下的
转矩稳定性问题。
为了实现 反电动势测量,
我们将在未驱动的 面线圈上应用
一个 60 度的窗口。
利用比较器 来检测过零,
这相当于霍尔 传感器中的信号
变化。
当一个线圈被正激励 而另一线圈被负激励时,
比较器随后可以 比较开路线圈上的
反电动势, 以获取直流
总线电压。
一旦检测到过零, 它将把激励顺序
索引到下一步。
另一种方法是 实现模数转换器,
该转换器将对 电压进行采样
并将其与对应于 零点的数字值
进行比较。
在 BLDC 电机的 梯形换向过程中,
电机反电动势 会随着转速的变化
而改变极性和振幅。
由于反电动势 与速度成正比,
因此反电动势波形 在启动时会具有
较低的振幅, 并且速度很慢,
这使得很难检测到过零。
常见的解决方案 是电机以开环模式旋转,
直至获得足够快的速度, 产生足够大的反电动势,
以进行测量。
可以使用初始 位置检测 (IPD)
和转子对齐等 先进技术
在无需连续 运动的情况下
找到启动时的初始位置。
IPD 用于 在电机静止时
检测初始位置。
转子在开始 换向之前
将转子对准一个已知的位置, 通常会在启动时
引起反向旋转。
有关这些技术的 更多信息
将在以后的 培训中提供。
如需查找更多电机驱动器 技术资源和搜索产品,
请访问 ti.com/motordrivers。