
人工智能
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
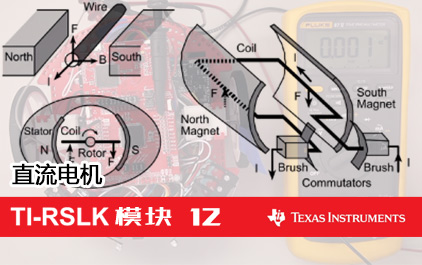
TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理


大家好,
我是
我们终于成功了,
我们终于来到这一章,
轮子将要旋转,
在本特定的视频中,
我们将讨论有关电磁场的
我们将讨论有关电磁场的
然后将讨论我们将
使用的直流电机。
好的。
那么,让我们开始吧。
让我们从电机运行所必需的
让我们从电机运行所必需的
那就是我们需要
好的。
我们要将电能注入到
我们要将电能注入到
该导线将绕成线圈,
从而产生一个感应磁场。
电机中内置了这些电磁铁,
这样一来,如果有电流通过导线,
它将生成一个磁场。
有许多相关的物理定律,
但我们只需要知道
注入电流。
好的。
那么,我们必须向导线中提供
足够大的电流,
才能够使电机转动。
好的。
那么,这是本幻灯片的重点,
当我们制作一个电机时,
我们必须处理相当大的电流,
从而生成较大的磁场,
该磁场会在轮子上
好的。
那么,在磁场产生之后,
我们现在需要通过
因此,我们将在这里使用
来观察所产生的力。
下面,让我们来深入研究该问题。
正如我在前一张幻灯片中说过的,
我们将生成一个磁场,
该磁场由电磁铁感应生成,
然后我们要让电流
该关系
将演示一个非常简单的关系,
其中(磁场、电流、力)
伸出您的右手,伸直大拇指
并用它来表示电流,
再伸直其他四根手指,
并用它们所在的维度表示磁场,
并用它们所在的维度表示磁场,
这将在您的手掌上产生一个力。
好的。
那么,现在我们把这个
代入到电机内部进行研究。
我们看到这些永磁体,
这些南北磁极是永久性的,
这些南北磁极是永久性的,
它们位于(线圈)外部。
它们称为定子,是
具有永久性的南北磁极。
然后,该位于转子内部的导线
--
--
--
就是这个电流。
根据右手定则,这将产生一个力。
根据右手定则,这将产生一个力。
因为导线位于转子上,
将使导线的这一侧向下运动,
另外一侧向上运动。
直流电机
是最简单的直流电机。
它具有电刷,这样,
电刷会使电流方向翻转。
电刷会使电流方向翻转。
因此,即使电流的方向
因此,即使电流的方向
如果我们观察绕组
也会发现该电流方向
这样,右侧力会一直向下,
左侧的力会一直向上。
这就是它旋转的原理。
这就是它旋转的原理。
那么,再强调一次,
是我们为了让电机旋转
是我们为了让电机旋转
但是,如果您还记得,
导线本身是弯曲的,
它们被绕成线圈的形状,
根据物理定律,这种绕成线圈
根据物理定律,这种绕成线圈
现在,导线的电阻取决于
铜的电阻率、导线长度、
导线横截面积。
这几乎是一个常数。
这是当您把它连接到欧姆计
我们将在本章中不断
我们将在本章中不断
是从物理角度上由电能
是从物理角度上由电能
好的。
这是一个有趣的转换,因为它实际上
这是一个有趣的转换,因为它实际上
因此,再说一次,我们将把电能
通过接口输入进去,
从而产生机械能。
同时转换也沿另一个方向发生,
我们可以输入机械能
因此,这里的重点是,
将在电路中生成一个电感
导线的长度决定电阻的大小,
这个机械能和电能的
电路中的一个电池,
或者在机械层面生成一个力。
这两者以一种有趣
这两者以一种有趣
好的。
现在,您可以参加有关电机
再强调一次,您需要了解的
我们需要让电流通过这个
模型由一个电阻、一个电感和
好的。
电机的电感
不会产生什么问题,直到我们
例如,我们将看到,
如果我将电流视为时间的函数,
并且在接口上输入错误的电流,
假设我可以在
假设我可以在
相当大的电压。
那么我们来算一下,
将电机的电感乘以
(通常
然后除以该驱动器的转换
这样可能会产生
这样可能会产生
这是一件很糟糕的事情。
因此,该电感
我们将在下一张
我们将观察到的另一个
电能将沿着这个方向
转换为机械力,
但与此同时,摩擦力
将沿反方向产生一个感应电压。
因此,我们还会在电机的
再重复一次,双向的能量转换
将发生在机械世界
将发生在机械世界
好的。
这是我们必须知道的知识。
如果我们把电机拆开,
我们可以看到它的组成部件,
包括转轴、
以及转子,
也就是旋转的部分。
您可以看到,它有一个
还记得我说过有一个
其实,它不是一个线圈,
因此,您可以在转子内部
而是有很多圈。
这里这些位于转子内部的线圈,
是导致电机呈现出
您还可以看到电刷,
您还可以看到电刷,
从外部电路角度来看,
我们要使电流从这里通到那里。
但这里(弧线处),才是
但这里(弧线处),才是
但这里(弧线处),才是
但这里(弧线处),才是
定子的这些部分,
接触电刷的这个部分(方块处)。
接触电刷的这个部分(方块处)。
电刷位于定子部分,
换向器位于移动部分。
这个点(电刷
电刷
这就是电机旋转时用来
这就是电机旋转时用来
很显然,那里(右边)是我们
很显然,这里(右边)是我们
因此,当我们控制电机时,
我们希望能够让一个
通过这些部分,因为
最终产生磁场和力,
最终产生磁场和力,
因此,从电气角度而言,
我们关心的是输入到
我们关心的是输入到
事实上,我们将几乎保持
电压恒定不变,这是由
我们将在下一张幻灯片
我们将以占空比模式
电机中生成的感应电流
则是摩擦力或机械负载的函数。
则是摩擦力或机械负载的函数。
因此,能量将会在电能
因此,能量将会在电能
因此,能量将会在电能
(产生的力)符合牛顿第二定律,
力
由于它是一个轮状物体,
我们还要关心这个距离
现在,电机产生的力
变成扭矩传导到
轮胎与地面接触的地方。
好的。
扭矩的单位是牛顿米。
如果力以牛顿为单位,
那么扭矩以牛顿米为单位。
所以下面是一个我们需要
如果我们使轮子更大,
电机仍然产生相同的力。
对吧?
因此如果我们采用相同的
我们实际上会获得更小的
好的。
最后需要提醒您的是,
电流的变化,即电流的斜率,
实际上将在电感上产生
实际上将在电感上产生
我们必须处理好这个问题。
那么,正如您看到的,
关于电机内部及其周围部件,
我们了解了轮上扭矩、
接口中的电感、
以及沿两个方向产生的电磁力。
所有这些将实现
软件产生的占空比与
软件产生的占空比与
好的。
那么,这就是我们说的转换,
它贯穿了物理、电气、软件、
以及机械方法。
好的。
那么,您必须
您需要记得右手定则,
电流在大拇指上沿这个方向流动,
磁场位于其它四个手指上,
手掌方向上产生力。
您可以了解电机内部结构,
主要有两个部件,
它是旋转的部件,还有定子,
它是旋转的部件,还有定子,
此外,连接二者的是
电刷,它位于定子和换向器上,
换向器位于转子上。
好的。
希望您喜欢本实验,
希望您喜欢本实验,
现在,我们可以进行比赛了。
在下一个视频中,我们
-
 未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
-
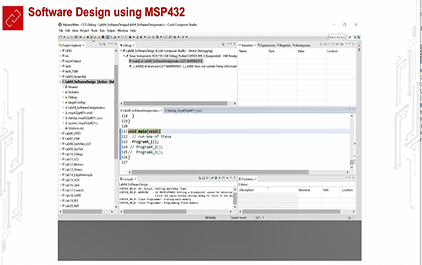
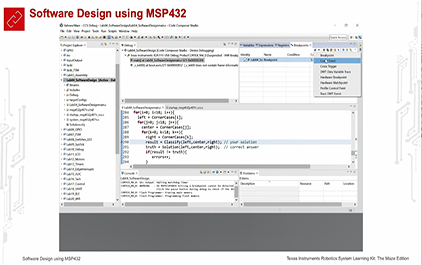
 未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器
未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器
-
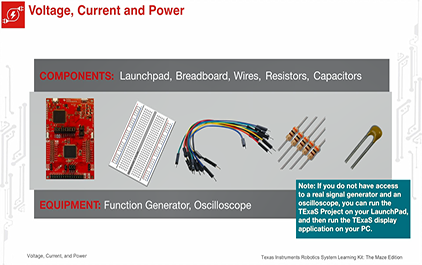
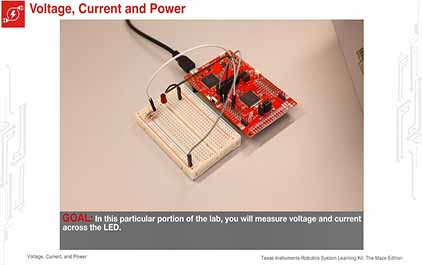
 未学习 TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率
未学习 TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率
-
 未学习 TI-RSLK 模块 2 - 实验视频 2.1 – 测量电容器的阻抗
未学习 TI-RSLK 模块 2 - 实验视频 2.1 – 测量电容器的阻抗
-
 未学习 TI-RSLK 模块 2 - 实验视频 2.2 – LED (I,V) 响应曲线、指数关系
未学习 TI-RSLK 模块 2 - 实验视频 2.2 – LED (I,V) 响应曲线、指数关系
-
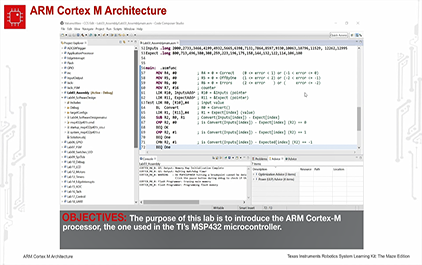
 未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 架构
未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 架构
-
 未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 组件
未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 组件
-
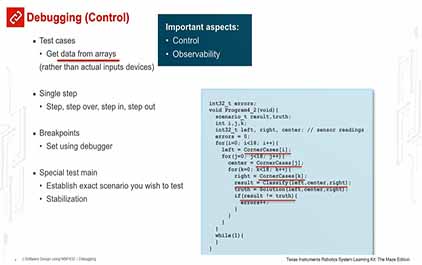
 未学习 TI-RSLK 模块 3 - 实验视频 3.1 - 调试解决方案、可视化、断点和单步执行
未学习 TI-RSLK 模块 3 - 实验视频 3.1 - 调试解决方案、可视化、断点和单步执行
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - C 语言编程
未学习 TI-RSLK 模块 4 - 讲座视频 - C 语言编程
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - 设计
未学习 TI-RSLK 模块 4 - 讲座视频 - 设计
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - 调试
未学习 TI-RSLK 模块 4 - 讲座视频 - 调试
-
 未学习 TI-RSLK 模块 4 - 实验视频 4.1 - 调试解决方案、可视化、变量、单步执行
未学习 TI-RSLK 模块 4 - 实验视频 4.1 - 调试解决方案、可视化、变量、单步执行
-
 未学习 TI-RSLK 模块 4 - 实验视频 4.2 - 调试解决方案、可视化、断点、单步执行
未学习 TI-RSLK 模块 4 - 实验视频 4.2 - 调试解决方案、可视化、断点、单步执行
-
 未学习 TI-RSLK 模块 5 - 讲座视频 - 电池和电压
未学习 TI-RSLK 模块 5 - 讲座视频 - 电池和电压
-
 未学习 TI-RSLK 模块 5 - 实验视频 5.1 - 测量电池的电压和电流
未学习 TI-RSLK 模块 5 - 实验视频 5.1 - 测量电池的电压和电流
-
 未学习 TI-RSLK 模块 5 - 实验视频 5.2 - 连接电机驱动器和配电板
未学习 TI-RSLK 模块 5 - 实验视频 5.2 - 连接电机驱动器和配电板
-
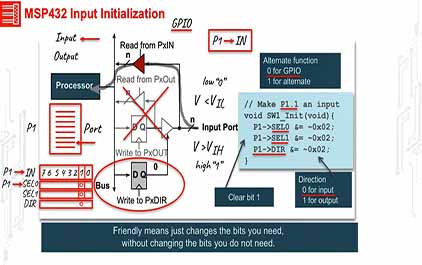
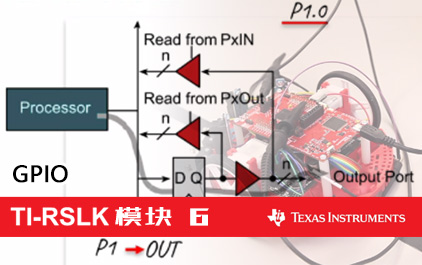 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
-
 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
-
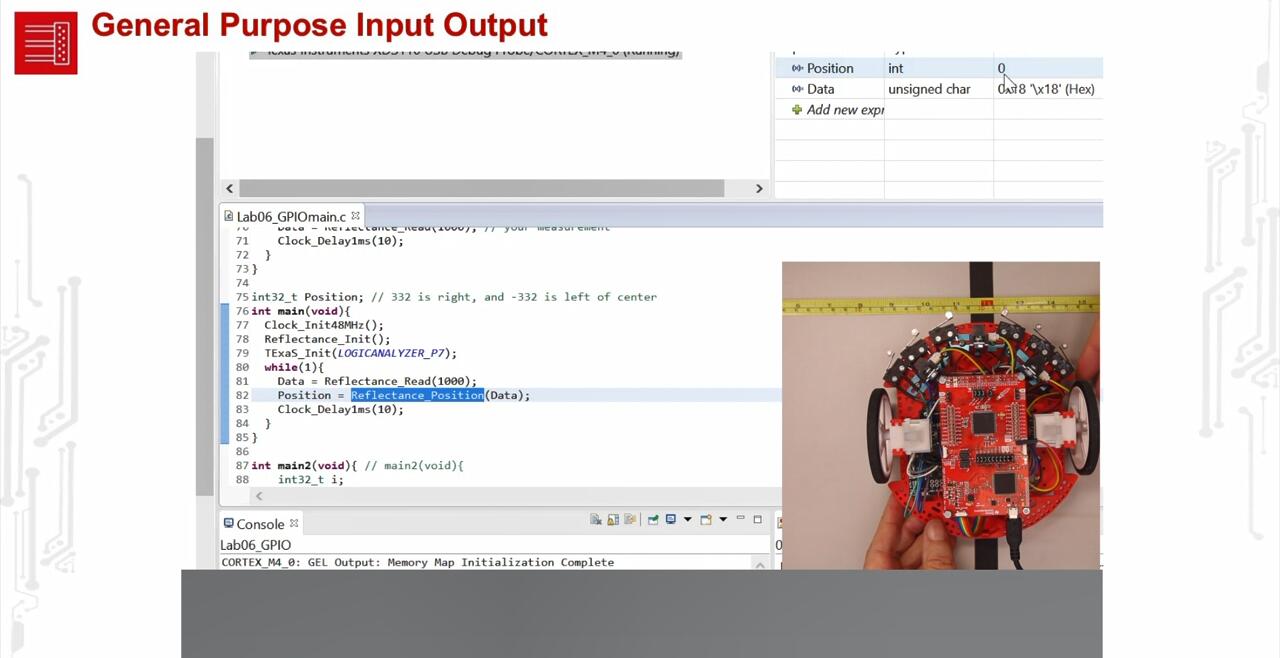
 未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
-
 未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
-
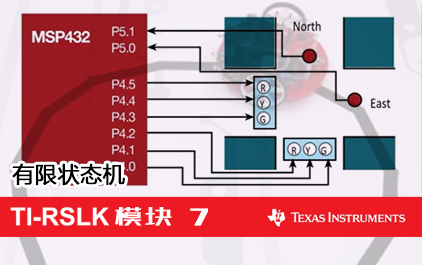 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
-
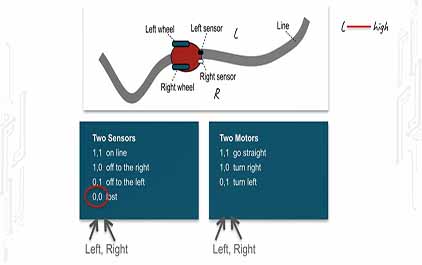 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
-
 未学习 TI-RSLK 模块 8 - 讲座视频第一部分 - 开关
未学习 TI-RSLK 模块 8 - 讲座视频第一部分 - 开关
-
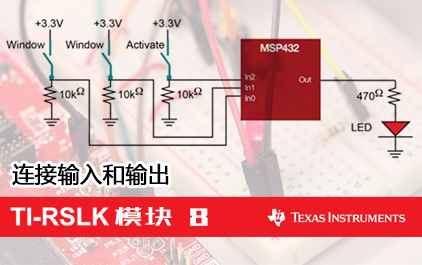
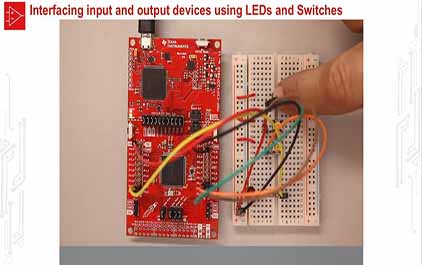
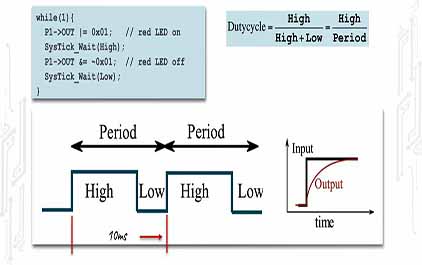
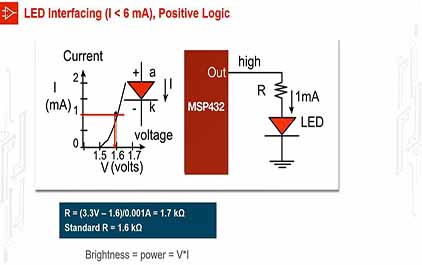 未学习 TI-RSLK 模块 8 - 讲座视频第二部分 - 连接输入和输出 - LED
未学习 TI-RSLK 模块 8 - 讲座视频第二部分 - 连接输入和输出 - LED
-
 未学习 TI-RSLK 模块 8 - 实验视频 8.1 - 连接开关和 LED 以及调试
未学习 TI-RSLK 模块 8 - 实验视频 8.1 - 连接开关和 LED 以及调试
-
 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
-
 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率
未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
-
 未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
-
 未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
-
 未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
-
 未学习 TI-RSLK 模块 13 - 讲座视频 - 周期性输入
未学习 TI-RSLK 模块 13 - 讲座视频 - 周期性输入
-
 未学习 TI-RSLK 模块 13 - 讲座视频 - 脉宽调制
未学习 TI-RSLK 模块 13 - 讲座视频 - 脉宽调制
-
 未学习 TI-RSLK 模块 13 - 实验视频 13.1 - 通过计时器产生的 PWM 输出来旋转电机
未学习 TI-RSLK 模块 13 - 实验视频 13.1 - 通过计时器产生的 PWM 输出来旋转电机
-
 未学习 TI-RSLK 模块 13 - 实验视频 13.2 - 测量中断延迟
未学习 TI-RSLK 模块 13 - 实验视频 13.2 - 测量中断延迟
-
 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
-
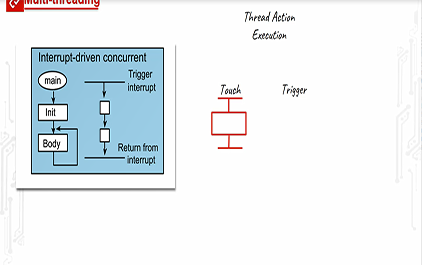
 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
-
 未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应
未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应
-
 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
-
 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
-
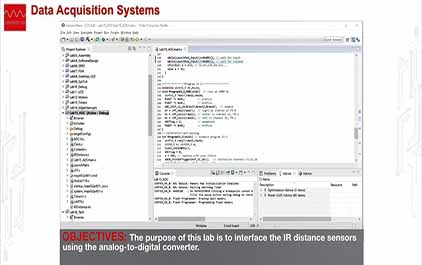 未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
-
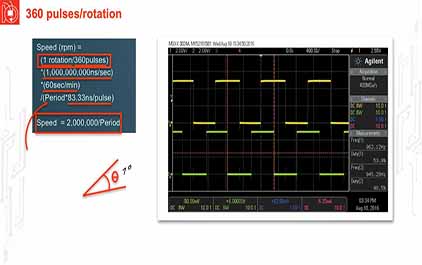
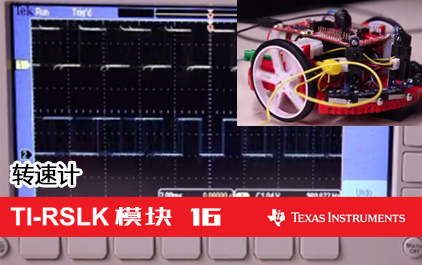 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
-
 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
-
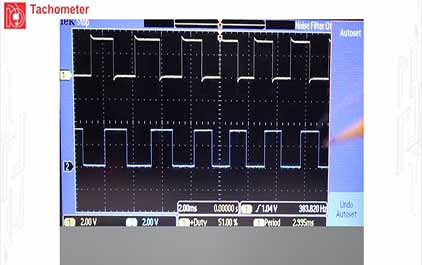 未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
-
 未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
-
 未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
-
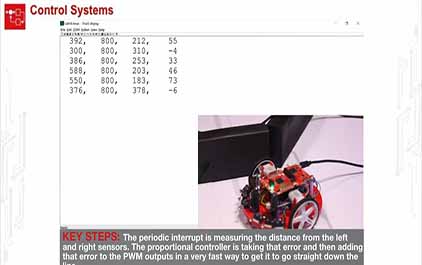 未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
-
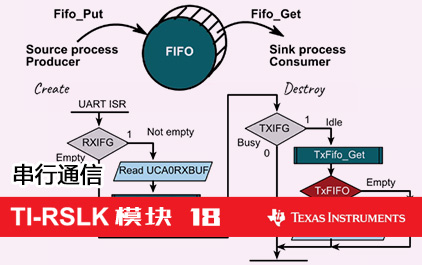 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
-
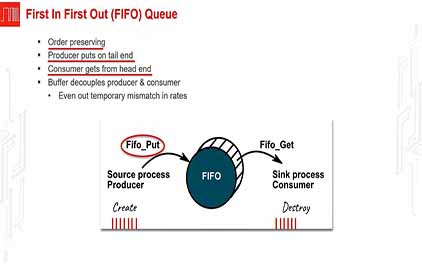 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
-
 未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
-
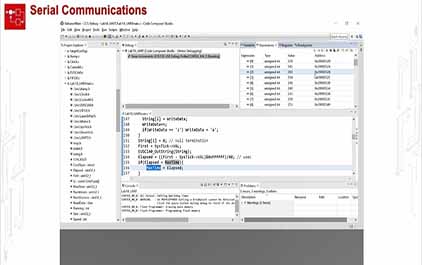
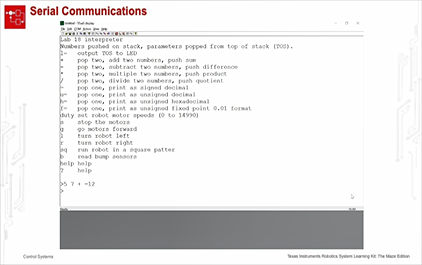 未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
-
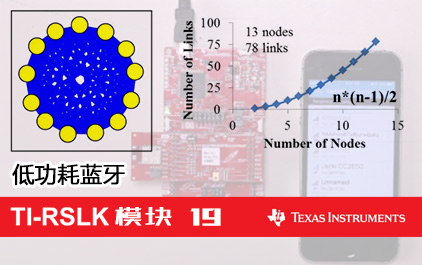 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
-
 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
-
 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
-
 未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
-
 未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信
未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信




































































 视频简介
视频简介
TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
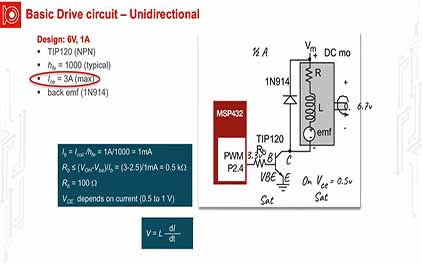
在该模块中,你将全面了解用于将电流驱动至直流电机的电路。

