
汽车
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
ADAS 主流系统架构介绍与设计挑战-2


然后第二部分的话
我会简短的给大家讲一讲
我们 TI 的 FPD-LINK 产品的
产品特点以及我们的技术的优势
那这里呢我们先看看几个基本概念
就我们图像的基本跟着我们重温一下
那第一个是像素 什么是像素
其实就是比如说我们一张图片
图像里面最小的单位
那比如这个图 那我们把它放大
它其实是一个个这样的马赛克的格子
那这里面呢最小一个小方块
它就是叫像素
那像素时钟
第二个是那什么意思呢
一般来说我们这个数字视频信号
那会有时钟来同步我们那个像素的数据
那一般来说呢
一个像素时钟周期就会对应一个像素
那所以说那我们的这个像素时钟
就可以通过这样一个公式来计算
可以通过我们的这个
屏幕的分辨率的那个宽度乘以高度
再乘我们那个刷新率
然后再乘以我们的消隐时间
这样来去做计算
那打个比方
那如果我们的屏幕
或者说我们摄像头分辨率是800×480
然后呢帧率是60赫兹
然后有 5% 的这个消隐的时间
那我们这个像素时钟
那就可以用800×480
再乘以 60 再乘以1.05
这样来计算那结果是24.192兆
这个就是我们要传输这个数字视频
所需要的像素时钟的频率
然后第三个概念是那个色深
那我们刚刚讲到每像素
那我们每个像素
其实我们都会用数字的值来表示它的颜色
那我们一般会把这个值
分为那个红绿蓝三组叫 RGB 三个组
如果说我们 RGB 每组各为六个比特
那我们就叫 18 位色深
或者叫 RGB666
那如果说RGB有八个比特
那可能就24位深叫 RGB888
也有也有叫那个 YUV 565 的
那可能就是 RGB 是有五个六个
跟五个那个比特
那就叫 565 这种格式
那色身的大小会有什么区别呢
那我们这边会有图会有展示
那这个是八位的那个那个颜色
然后这 16 位 24 位
那我们可以看到
随着那个色深的越来越高
那我们的颜色的数量会越来越多
那我们能够显示的这个颜色
也会越来越细腻
所以说其实色深我们是越高
效果是越好的
这个是基本概念
那第二个呢我们
大概快速讲讲我们 FPD-Link 的发展历程
那我们在最早最早的时候
其实我们的那个 FPD-Link
只是说把我们的并行的 RGB 信号
然后转成那种 10 线 的 OLDI
就我们常见的 OLDI 来传输
那这个的话它的输出其实是有那个五个线
就包括四个数据跟一个时钟
然后的话那个传输的那个距离就比较短了
只能到三米左右
那再长可能就会有那个噪点跟干扰
然后我们因为车上
其实那个电子的东西越来越多
那我们需要的传输距离也越来越长
所以为了我们把这个问题给解决
那我们就推出 FPD-Link 的第二代
那它的改进之后
我们可以把这个并行的数据视频加时钟
你要全部揉到一根线上
就一根双绞线或者一根同轴上去传输
那我们就可以是达到那个十米的距离
那由于我们是只用一根线
所以说那个线材的那个重量
跟那个成本都大大的减小
但是呢他还有缺点
就是说我这根同轴线
我只能够传那个视频
但如果说我要反向去传控制
比如说从 IO 口或者说通过那个 I2C
去传一些反向的控制
那也没办法
我还是要额外拉
那我们为了更简化这个设计
那我们就推出了 FPD-Link 第三代
那他可以把那个并行的数据
时钟还有我们的控制
那全部都揉到了一根双绞线
或者说一根同轴线上传输
那同样的我们能够传出超过十米的距离
并且我们支持多种接口
比如说 RGB LVDS MIPI CSI DSI 等等
各种接口
那这个 FPD-Link 的第三代
那它的相关特性
我后面会去给大家讲解
那这个就是我们大致的介绍
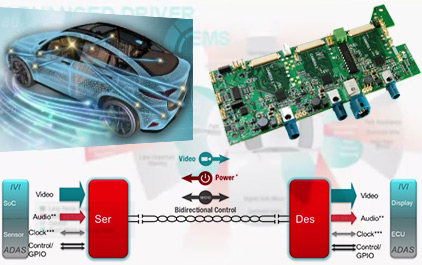
那我们现在今天讲 ADAS
我们就看下面这部分
那我们的 ADAS 摄像头这边
他 sensor 拍了数据以后
那他会把这个视频 音频
还有时钟控制
那都通过这个串行器
把它变到双绞线上去
或者同轴上传输
然后到了我们收端呢
我们会把这个串行的数据
在解回并行的数据
然后给 ECU 做处理
那对于 ECU 来说呢
其实它这两个芯片
其实对他说是透明的
就 ECU 会感觉到
我只是直接跟这个 sensor 通讯
然后这个时候呢除了传输视频以后
我还可以去通过IO口
或通过 I2C 同时把这些控制信号
通过反向来给到我们那个 sensor
控制它做各种那个处理跟操作
这个是个大概的系统的结构
那同样那如果对于我们那个
导航主机其实也是类似的功能
我们可以看上面
那这个是导航的主机
那主机的处理器可能要发送视频出去
然后给到串行器
然后串行器会通过
会把这个视频变成串行信号
就给到我们的接收
接收这边会再会把这个视频
变为并行给到我们远端的屏幕
因为现在很多车都喜欢
做那个悬浮屏或分离屏
那这种方案就会特别有这个优势
那同时呢我们屏幕上的一些触摸信号
那也可以通过这个控制 I2C
给回传到给这个主机
然后去做对应的操作
那这个就 FPD-Link 的
大概的结构 应用结构
那我们可以用这个同轴电缆
或者用这种屏蔽双绞线
那我们都可以去实现这样的传输
那这个是我们 FPD-Link 两种应用场合
那第一是摄像头的连接
他视频方向主要是用摄像头传到主机
那第二类是我们的屏幕连接
那主要是从我们主机
给到那个远端的屏幕这两种应用
那这个就是我们这个
FPD-Link 的一些特点
一个 High light
那是我们除了传视频
那还刚前面讲的你除了传视频
还能够传那个双向的控制
比如 I2C SPI 跟 GPIO
甚至电源都可以传
然后的话我们有那个自适应均衡
可以适应不同的那个线缆长度
跟那个老化程度
然后第三个就是说我们有各种接口
包括 RGB YUV OLDI MIPI 等等
这样的接口
那可以适应不同的那个 sensor
适应不同的那个处理器的接口
那对于那个屏幕显示方面
那目前我们产品
最高是能到 2k 这个级别
那对于 ADAS 产品的话
我们目前的话最高能到
200 万像素这个 sensor
然后那个传输延迟非常低
并且可以有很多创新的
那个时钟同步方式
去保证我们的那个时钟源的清洁
那我们后面会讲到
OK 那往下呢这个就是
关于我们重要的功能
叫那个自适应均衡这样的功能
那我们可以看到
这个呢是我们发送端的波形的眼图
那其实这个眼图还是挺好的
我们可以正确判断他那个零和一
但这个发送端的信号
经过十米线传输以后
由于线缆上会有衰减
所以这个时候他的眼图就变得很差了
眼睛基本上闭合了
那所以这个时候呢
如果我们想去判断它的零和一
其实它就没法判断了
那对于我们实际的情况
可能你就会看到那个图像会有噪点
或者会花屏
甚至什么都没有显示
那我们为了在那个长距离传输以后
能够再准确判断是零和一
那我们需要加入均衡
我们叫 eq 这样电路
这个在IC内部集成的
那经过这均衡以后
我们就可以把
经过十米线缆传输以后的那个数据
然后重新恢复成这样比较漂亮的波形
那这样的话我就可以去正确识别
它是零呢还是一
就不会有那个燥点
但是这样有个问题
我们的均衡 它并不是固定的值
它是需要根据我们的线缆长度
还有我们的线缆的材质
包括阻抗来去动态设定的
那我们的优势在于
我们有叫自适应均衡
就是说无论你们使用多长的线
还有就无论你们使用的线缆的材质
还有无论你那个线缆用了多少年
可能因为随着线缆的那个老化
它也会有变化
就无论的长度 那个材质
以及那个那个使用年限的变化
那我这个均衡呢都可以去自适应去调节
来保证我这个接收端信号
能够实现最好的情况
然后呢从而保证我们最好的系统稳定性
对我们的这个视频的质量
这个是自适应均衡
那这样的话我们也可以
我们就可以使用更加低成本的线缆
也可以有更好的可靠性
然后下一个是说
我们可以实现这个实时的双向传输
那我们一方面呢
可以实现高速的正向的视频传输
那同时 我还在这个高速视频传输同时呢
我还可以在上面叠加一个低速的控制信号
两方是可以同时进行
而不会受任何的
在同一根线上同时进行
不会受任何的干扰
那我们的延时可以低至15个微秒
那对于这个信号其实
对于这个我们的那个摄像头的控制
其实你是足够的
然后的话线缆就跟前面说的一样
我们可以用同轴或者说屏蔽双绞
那都是没问题
那我们刚刚讲那么多
那我们在中间串行的那个走线
我们用的是什么样的格式呢
可能很多那个观众
觉得我们中间那个串行口
它走的是 LVDS 的信号
那其实不是
因为 LVDS 的话
当你频率大过 2G 以后
他的那个 EMC 跟功耗会大大的增加
所以说我们这个串行口的话
我们用的是那个 CML 的结构
那 CML 能够保证我们在高速的情况下
能够实现更低的功耗
跟更小的那个 EMI 的性能
干扰性能就更好
这个是我们差分的电平
就是 CML 电平
那下面呢我会用我们摄像头的传输的芯片
我们的 913 914 来举例子
它是怎么实现这个刚刚我们说那个叫
并行变这个串行这样传输的呢
它是这样子
我们每一个像素时钟
我们会把他的并行数据
把它打成一个帧往外发
所以那这个帧的长度是 28 比特
就是说我们每像素的那个时钟周期内
我们都会发 28 个比特这样一个帧往外发
那这 28 比特里面
有一部分是我们的 RGB 的数据
另外也有一部分是我们的那个控制数据
那我们会都会把它
塞到这个 28 个比特的帧里面往外发
这样就是让我们那个并转串的变化
然后到了我们接收端呢
我们就会把这个串行信号重新变为并行
然后再发到给我们的处理器
那这个是大概的计算的公式
那我们会有这是10bit跟12bit的模式
那对于10bit模式
我们一般会用10bit那个高频模式
那我们的算法就是说
我们会用那个 PCLK 除以二
再乘前面说 28
那这大概可以算出我们的
串行这样速率
那比如说我们是 PCLK 是一百兆
那我们的串行线上的
速率就是 1.4G 这样数据
那具体各位可以去参考我们的规格书
上面有个更详细的说明
那这个的话就说给大家展示了
我们刚刚说都是说那个前向通道
那我们怎么同时实现
我们前向的高速的信号
跟我们反向的控制信号实时传输
如果各位拿个示波器
去看一下我们那个串行线上的波形
那大家就能看到这样一个波形
那这个波形的话它那个
很密这个就是我们那个正向的传输
它是高速的
然后上面这个包络呢
就是我们反向的传输的信号
那由于我们正向跟反向的那个
速率是有个差异的
所以我们这个高频跟低频
可以叠在一起来传
然后只要我在两端分别加高通跟低通滤波器
我就可以把它的这个控制信号
就可以把它那个反向控制信号
跟前向的那个视频信号分离出来
而不会任何干扰
那如果各位我们把那个反向通道关掉
那我们就可以看到它只剩下正向通道
就只剩很密的高速的信号了
所以这个就是我们的怎么实现
我们怎么实现这个正反面同时传输的方式
所以这一章就我给各位
大概快速讲解了我们 TI FPD-Link 的
一些基本的原理基本的构造
以及我们的技术优势
-
 未学习 汽车车身控制模块1
未学习 汽车车身控制模块1
-
 未学习 汽车车身控制模块2
未学习 汽车车身控制模块2
-
 未学习 汽车车身控制模块3
未学习 汽车车身控制模块3
-
 未学习 汽车车身控制模块4
未学习 汽车车身控制模块4
-
 未学习 电动汽车模拟引擎声音系统设计1
未学习 电动汽车模拟引擎声音系统设计1
-
 未学习 电动汽车模拟引擎声音系统设计2
未学习 电动汽车模拟引擎声音系统设计2
-
 未学习 电动汽车模拟引擎声音系统设计3
未学习 电动汽车模拟引擎声音系统设计3
-
 未学习 ADAS-车用全景解决方案 - TID3X -1
未学习 ADAS-车用全景解决方案 - TID3X -1
-
 未学习 ADAS-车用全景解决方案 - TID3X -2
未学习 ADAS-车用全景解决方案 - TID3X -2
-
 未学习 ADAS-车用全景解决方案 - TID3X -3
未学习 ADAS-车用全景解决方案 - TID3X -3
-
 未学习 ADAS-车用全景解决方案 - TID3X -4
未学习 ADAS-车用全景解决方案 - TID3X -4
-
 未学习 ADAS 主流系统架构介绍与设计挑战-1
未学习 ADAS 主流系统架构介绍与设计挑战-1
-
 未学习 ADAS 主流系统架构介绍与设计挑战-2
未学习 ADAS 主流系统架构介绍与设计挑战-2
-
 未学习 ADAS 主流系统架构介绍与设计挑战-3
未学习 ADAS 主流系统架构介绍与设计挑战-3
-
 未学习 ADAS 主流系统架构介绍与设计挑战-4
未学习 ADAS 主流系统架构介绍与设计挑战-4
-
 未学习 ADAS-车用全景解决方案 - TDA2E17
未学习 ADAS-车用全景解决方案 - TDA2E17
-
 未学习 车身照明系统设计
未学习 车身照明系统设计

















