
汽车
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
ADAS 主流系统架构介绍与设计挑战-1


早上好
欢迎各位参加今天的直播
我是 TI 的模拟应用工程师张志豪
今天我将给各位介绍
在市场日益增长的需求下
ADAS 系统上我们面临的设计挑战
以及 TI 的 FPD-LINK 产品
如何帮助各位应对挑战
跟解决实际的问题
我们今天的直播分为以下四个议程
第一个我们会简单介绍一下
目前 ADAS 的主流系统架构跟设计挑战
第二个我们会讲一下 TI 的
FPD-LINK 产品的特点以及技术优势
然后我们再去详细讲述
我们 FPD-LINK 在 ADAS
环视系统中的具体应用的介绍
最后我们会介绍我们
TI FPD-LINK 的相关的设计资源
来帮助各位完成设计
OK 首先我们讲第一个议程
什么是 ADAS
我想先问各位一个问题
我们正常人的视角会是有多少度
大家如果去网上搜索
就能发现
我们正常人如果两个眼同时看前方
大概只能有 120 度的视角
但是呢我们很多老司机就跟我说
这个开车要眼观六路耳听八方
但是不是每个人都是老司机怎么办
这个时候我们的 ADAS 就可以帮到我们
ADAS 全称就是叫高级驾驶辅助系统
它是可以借助我们比如说摄像头
雷达 超声 等等的传感器
去实时帮助我们监控
汽车周围的环境
然后给到我们驾驶辅助
让我们驾驶可以更安全更舒适
有了这个系统
我们就可以真正的做到
眼观六路 耳听八方
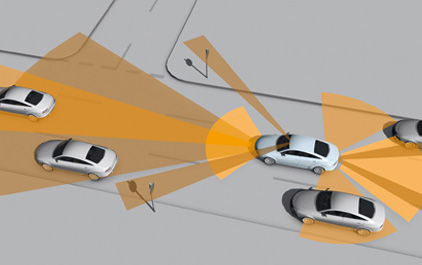
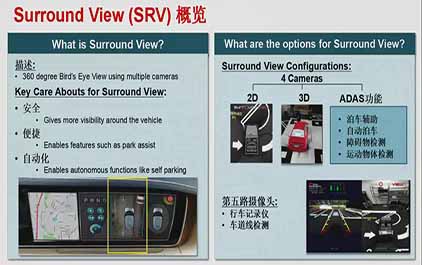
我们可以看这个图
我们配合的 ADAS 系统以后
摄像头可以让我看到
整车周围的环境
各种雷达可以帮助车辆
探测到远距离 中距离
近距离的各种障碍物
帮助汽车以及帮助我们驾驶员
可以快速做出判断
既然我们需要
我们有这么多的传感器跟摄像头
我们就要考虑
我怎么可以把它连接起来
这页 PPT 就讲述到我们车上
三种这个高速信号的连接的方式
我们有三类
一类是说我们屏幕的连接
就比如我们左边这个图
第二类呢是我们摄像头连接
就我们中间这个图
第三类呢主要目前是
用在我们个车身电子上
主要是我们以太网的
或者 CAN 上的连接
我们今天的重点是
我们今天的重点是
我们这个 ADAS 方面的连接
我们可以看到我们车上有很多摄像头
包括前视后视跟个两侧环视
还有包括各种超声
或长波 毫米波这样的雷达
这些摄像头跟雷达呢
都会通过连接到我们的
ECU 做个统一的处理
这些包括我们的摄像头
就比如说我们倒车的
我们的环视的
甚至包括我们在车里面的摄像头
来检测我们驾驶员的
驾驶状态的摄像头
以及说这边的雷达或者超声等等
这些都是通过高速的数据连接
连到我们的 ECU
随着我们的 ADAS
包括我们自动驾驶的要求越来越高
其实摄像头也好
摄像头的分辨率会越来越高
然后的话我们这个
雷达的数据量也越来越大
可以看看这个要求
这里我们列出了
不同摄像头的要求
比如说我们的倒车
环视跟前视等等的摄像头
我们都需要更高的分辨率
我们的前视还有我们的夜视
可能会我们就需要更高的帧率
所有这些更高分辨率跟更高帧率
都要求着更大的数据量
对于在这个要求的情况下
我们看我们传统的
这个模拟的摄像头
可能就很难胜任我们目前的工作
因为它是模拟的传输
可能它分辨率会相对比较低
同时呢会更加容易受到干扰
并且的话呢
可能我们大部分情况
还可能还需要
外部拉一根电源线跟控制线
来去传递我们额外的信号
这样在车的轴线上
其实是比较
比较麻烦的问题
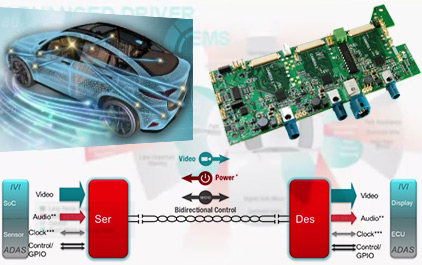
OK 为了应对这种情况
我们就有了新一代的
这种叫数字式的这种摄像头
这边这个图 左边是摄像头模块
右边是我们个 ECU
或者我们的接收机
这边我们的 sensor
通过串行器
把我们的个并行数据转成串行
然后通过同轴电缆往外发
然后在我们接收端呢
再通过解串器
把这个串行数据再解回并口
给到我们的处理器去做处理
然后除了传这个视频信号以外
我还可以通过同一根同轴线
去传输我们的双向的控制信号
比如说 I2C 比如说 IO 口
另外呢我们还可以把电源
通过叫 POC 电路
给耦合到这个同轴线上
然后同时传输给摄像头
所以用这种方式的话
由于它是全数字的方式传输
所以我们的干扰会比较小
并且的话可以传输更高的分辨率
然后同时的话除了这个视频以外
我还可以同步传输
在同一根同轴线上
同步传输这个控制跟电流的信号
这样的话既节省空间
也让我们的成本会更加低
可靠性也更加高
这个是我们传统的
数字摄像头的大概的结构
最左边是我们个镜头
然后后面我们一般会有个 CMOS Sensor
Sensor 可能后面可能会
经过图像处理以后
就会给到我们 FPD LINK串行器
这个串行器的话
就会把我们个并行的视频数据
打包然后变成串行
然后传到我们个远端的接收器边去
然后同时这边还会有些电源
包括 DCDC LDO 等等的电源
然后给这个摄像头做供电
然后第二个呢是种雷达的模块
他的结构跟前面的
摄像头也是类似的
他这边有我们有雷达模拟前端
很多这种雷达的模拟前端
比如说个毫米波雷达或短波雷达
它们的输出的格式
其实都是个并口
或者 MIPI CSI-2 就跟我们的摄像头类似
所以对于这种的并行的格式
我们同样也可以通过这个
FPD-link 的串行器
把这个雷达的信息转成串口
同轴然后传到我们远端
然后雷达可能相对
还会系统会复杂一点
我们应该可能还会需要 MCU
做一些配置跟控制
然后还需要各个更多的电源
或者 CAN 做这样通信
然后这个是
大概雷达模块的框图
然后前面讲的是关于
我们发送端的设备
后面我们介绍两个
接收端的框图
这个呢是四个摄像头的
全景模块的大的框图
左边是我们四个数据摄像头
其他的框图我们前面讲过了
我们的 sensor 拍了视频以后
会把它变成串口
然后分别就发到我们这边搭了ECU端
然后ECU端呢我通过解串器
我们先通过 POC
叫线缆供电那个网络
我们先把个电源给分离出来
然后最终的数据呢我们通过四个解串器
把我们的 sensor 的信号变回并行信号
然后给到我们的 ECU
我们的处理器进行处理
这个是主的个信号链路
除了信号链路以外
可能还我们还有电源
就比如说我们从电池
通过高压 DCDC 转成个 5 伏 3.3伏
然后再通过低压的 DCDC和LDO
再转给各个电源轨
给到我们的个处理器
同时呢我们上面还会有MCU
然后做一些 CAN 总线的控制
就跟车身的其他设备做交互这样的应用
然后有些场合可能
我们还需要说我拍了这个全景
我拍了这个图像
我希望能够实时看到
这里呢我们也有可能会用到
另串行器就把这个合成以后的图像
给又变成串行
然后传到我们个远端的屏幕上去
然后供我们的驾驶员做实时的观看
这个是我们
前面个是我们上一代的方法
如果说我想这个系统更加简洁了怎么办
我们有新一个的方案
就是说我们有一颗
集成四个通道的这样解串器
它用一个芯片
就可以把我们四个摄像头的
视频信号全部给解压出来
变回并行的信号
比如说 MIPI 这样信号
然后传到我们处理器上
这样的话整个系统的空间
跟体积还有可靠性都会有很大的提升
并且的话成本呢也会有个比较明显的下降
这一部分呢就是我们的第一部分
就我们大概快速讲解一下
我们当前 ADAS 系统的基本的结构
还有我们的设计挑战
往下的三部分
我们会具体的讲解我们的 FPD-LINK 产品
怎么去帮助各位
去应对这些这些日益增长的这些挑战
-
 未学习 汽车车身控制模块1
未学习 汽车车身控制模块1
-
 未学习 汽车车身控制模块2
未学习 汽车车身控制模块2
-
 未学习 汽车车身控制模块3
未学习 汽车车身控制模块3
-
 未学习 汽车车身控制模块4
未学习 汽车车身控制模块4
-
 未学习 电动汽车模拟引擎声音系统设计1
未学习 电动汽车模拟引擎声音系统设计1
-
 未学习 电动汽车模拟引擎声音系统设计2
未学习 电动汽车模拟引擎声音系统设计2
-
 未学习 电动汽车模拟引擎声音系统设计3
未学习 电动汽车模拟引擎声音系统设计3
-
 未学习 ADAS-车用全景解决方案 - TID3X -1
未学习 ADAS-车用全景解决方案 - TID3X -1
-
 未学习 ADAS-车用全景解决方案 - TID3X -2
未学习 ADAS-车用全景解决方案 - TID3X -2
-
 未学习 ADAS-车用全景解决方案 - TID3X -3
未学习 ADAS-车用全景解决方案 - TID3X -3
-
 未学习 ADAS-车用全景解决方案 - TID3X -4
未学习 ADAS-车用全景解决方案 - TID3X -4
-
 未学习 ADAS 主流系统架构介绍与设计挑战-1
未学习 ADAS 主流系统架构介绍与设计挑战-1
-
 未学习 ADAS 主流系统架构介绍与设计挑战-2
未学习 ADAS 主流系统架构介绍与设计挑战-2
-
 未学习 ADAS 主流系统架构介绍与设计挑战-3
未学习 ADAS 主流系统架构介绍与设计挑战-3
-
 未学习 ADAS 主流系统架构介绍与设计挑战-4
未学习 ADAS 主流系统架构介绍与设计挑战-4
-
 未学习 ADAS-车用全景解决方案 - TDA2E17
未学习 ADAS-车用全景解决方案 - TDA2E17
-
 未学习 车身照明系统设计
未学习 车身照明系统设计

















