2.1 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD概述
Loading the player...
将在30s后自动为您播放下一课程
大家好! 欢迎观看有关 通常称为 CAN 通信的控制器局域网 通信的 TI 高精度实验室视频。 该视频将介绍 CAN 收发器 用于通过 CAN 总线 进行通信的方法, 尤其是在 汽车应用中。 该介绍性 视频将包括 CAN 概述、标准 简介、物理层 介绍以及对不同 CAN 协议的论述。 这是典型的汽车 车身网络示例。 汽车中的中央 车身控制装置 或任何类似的 主器件需要 与汽车中其他 通常远离主器件 本身的器件 进行通信, 以完成各种任务。 此处以蓝色 显示的 CAN 总线 允许组件在汽车中 彼此无缝通信。 以黄色显示的 LIN 总线 允许进一步扩展到 外围器件。 例如,使用该总线 网络,空调系统 可以与电动座椅 系统相连接,以激活 座椅加热器, 或者控制单元 可以在踩下 制动踏板时 激活制动灯。 该总线层次结构设计 可以节省线路成本。 线路是汽车中 最昂贵的部件之一。 它很重并且 通常手工组装。 因此,线路对汽车的 整体生产成本具有 直接的影响。 汽车设计人员使用 CAN 来 最大程度地减少汽车中的 线路,从而降低制造 成本并提高燃油效率。 CAN 是当今汽车中 使用的主要总线。 它使电动座椅、 车门模块和 空调单元等不同的 模块能够相互通信。 具有灵活数据 速率的 CAN 或 CAN FD 是通过该总线进行 通信的最常用的方法。 CAN 和 CAN FD 实现差分两线制 接口。 传统 CAN 的运行速率 最高为 1 兆位/秒,而 CAN FD 的运行速率 最高为 5 兆位/秒。 LIN 是以较低数据 速率运行的子总线。 CAN 标准为多点 总线应用中的 异步串行通信 定义了协议和 物理层。 每个节点由一个 MCU 中的 一个 CAN 收发器和一个 CAN 控制器构成。 传统 CAN 通过差分 总线以高达 1 兆位/秒的 数据速率进行通信, 而具有灵活数据速率的 CAN 以高达 5 兆位/秒的 数据速率进行通信。 CAN 专为与双绞线 电缆配合使用而设计。 网络应采用总线拓扑 结构进行布线,从而 尽可能限制 末梢区域数量。 用于 CAN 和 CAN FD 的 总线的两端应使用与 网络阻抗 匹配的电阻器 正确端接。 正确的端接有助于 减少等信号完整性问题, 例如反射。 如果从 总线中移除 节点,则设计人员在选择 放置端接电阻器的位置时 必须格外小心。 可以通过不同的 方法实现端接。 标准端接在总线的 两端各使用一个 端接电阻器。 一种替代方法 是分裂端接, 如右图所示, 它可以改善 信号完整性和 电磁发射特性。 它还可以 消除总线 共模电压 电平的波动, 同时保留 差分波动。 采用双绞线 布线的 CAN 总线 拓扑通常具有 120 欧姆的特性阻抗。 因此,正确的端接通常 需要使用 120 欧姆的 端接电阻器。 由于 CAN 网络将 CANH 和 CANL 连接至 VCC 和接地等 电源,因此端接 电阻器的 额定功率 应考虑网络中 CAN 收发器的 短路电流保护。 CAN 是两线制 差分信号。 差分电压 VD 是高侧信号 CANH 与低侧 信号 CANL 之差。 逻辑值 1 由低 VD 表示, 称为隐性状态。 逻辑值 0 由高 VD 表示, 称为显性状态。 驱动器可以主动 将总线拉至显性状态, 但在没有驱动器 驱动显性信号时, 总线只能通过 端接电阻器上的 耗散被动返回 至隐性状态。 我们将在标题为 CAN 物理层和硬件的 TI 高精度实验室 视频以及标题为 CAN 协议和 CAN FD 的 TI 高精度实验室视频中 论述显性和隐性 状态的特性及其 对消息仲裁的影响。 汽车 CAN 接口 由 ISO11898 标准 规定,该标准 包括六个部分。 每个部分论述此处 显示的 CAN 的某个 特定方面。 例如,第二部分 称为 ISO11898-2, 其中论述高速 CAN 的 CAN 物理层。 第五部分在 第二部分概述的 要求中增加了 低功耗模式要求。 第六部分概述了 部分联网要求。 ISO11898 标准中 使用的命名 约定与汽车制造商 经常使用的术语类似。 很多时候,汽车 制造商会使用低速、 中速和高速等 术语来描述 CAN 数据速率。 这些名称可能 相对任意,甚至 在不同的汽车制造商 之间可能有所不同。 可以理解的是, 由于 ISO 标准使用 类似的命名规则,因此 这些名称可能会引起混淆。 低速容错 CAN 称为 LSFT CAN, 由 ISO11898 的 第三部分定义, 它以最高 125 千位/秒的速度 运行,该速度类似于 上面显示的汽车 低速 CAN 定义。 不过,对于所有 这三种汽车制造商 数据速率定义, 大多数汽车制造商 实际上在实施高速 CAN 或 HS CAN,它们 通常以最高 1 兆位/秒的速度运行, 由 ISO11898 的第 2、5 和 6 部分定义。 请注意,高速 CAN 完全覆盖了 低速容错 CAN 的 工作范围。 TXD 和 RXD 超时 时间将 CAN 收发器的低端 范围限制为 10 至 40 千位/秒。 当前,许多汽车使用 传统高速或 HS CAN。 具有灵活数据 速率的 CAN 或 CAN FD 是对传统 CAN 的增强, 能将可用宽带 增加至高达 5 兆位/秒。 还有许多其他 基于 CAN 的更高层 标准和协议,它们 决定着各种应用, 包括航空、农业、 嵌入式控制、 工业自动化、 军事、船舶和 安全关键型应用。 这些标准建立在 本演示概述的 ISO11898 标准基础 之上,其中许多 标准具有决定 电磁兼容性 和静电放电要求的 其他测试标准。 要查找更多 CAN 和 CAN FD 技术资源 以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。 此外,务必观看我们其他 有关 CAN、LIN 和 SBC 的 TI 高精度实验室视频。 谢谢观看。
大家好! 欢迎观看有关 通常称为 CAN 通信的控制器局域网 通信的 TI 高精度实验室视频。 该视频将介绍 CAN 收发器 用于通过 CAN 总线 进行通信的方法, 尤其是在 汽车应用中。 该介绍性 视频将包括 CAN 概述、标准 简介、物理层 介绍以及对不同 CAN 协议的论述。 这是典型的汽车 车身网络示例。 汽车中的中央 车身控制装置 或任何类似的 主器件需要 与汽车中其他 通常远离主器件 本身的器件 进行通信, 以完成各种任务。 此处以蓝色 显示的 CAN 总线 允许组件在汽车中 彼此无缝通信。 以黄色显示的 LIN 总线 允许进一步扩展到 外围器件。 例如,使用该总线 网络,空调系统 可以与电动座椅 系统相连接,以激活 座椅加热器, 或者控制单元 可以在踩下 制动踏板时 激活制动灯。 该总线层次结构设计 可以节省线路成本。 线路是汽车中 最昂贵的部件之一。 它很重并且 通常手工组装。 因此,线路对汽车的 整体生产成本具有 直接的影响。 汽车设计人员使用 CAN 来 最大程度地减少汽车中的 线路,从而降低制造 成本并提高燃油效率。 CAN 是当今汽车中 使用的主要总线。 它使电动座椅、 车门模块和 空调单元等不同的 模块能够相互通信。 具有灵活数据 速率的 CAN 或 CAN FD 是通过该总线进行 通信的最常用的方法。 CAN 和 CAN FD 实现差分两线制 接口。 传统 CAN 的运行速率 最高为 1 兆位/秒,而 CAN FD 的运行速率 最高为 5 兆位/秒。 LIN 是以较低数据 速率运行的子总线。 CAN 标准为多点 总线应用中的 异步串行通信 定义了协议和 物理层。 每个节点由一个 MCU 中的 一个 CAN 收发器和一个 CAN 控制器构成。 传统 CAN 通过差分 总线以高达 1 兆位/秒的 数据速率进行通信, 而具有灵活数据速率的 CAN 以高达 5 兆位/秒的 数据速率进行通信。 CAN 专为与双绞线 电缆配合使用而设计。 网络应采用总线拓扑 结构进行布线,从而 尽可能限制 末梢区域数量。 用于 CAN 和 CAN FD 的 总线的两端应使用与 网络阻抗 匹配的电阻器 正确端接。 正确的端接有助于 减少等信号完整性问题, 例如反射。 如果从 总线中移除 节点,则设计人员在选择 放置端接电阻器的位置时 必须格外小心。 可以通过不同的 方法实现端接。 标准端接在总线的 两端各使用一个 端接电阻器。 一种替代方法 是分裂端接, 如右图所示, 它可以改善 信号完整性和 电磁发射特性。 它还可以 消除总线 共模电压 电平的波动, 同时保留 差分波动。 采用双绞线 布线的 CAN 总线 拓扑通常具有 120 欧姆的特性阻抗。 因此,正确的端接通常 需要使用 120 欧姆的 端接电阻器。 由于 CAN 网络将 CANH 和 CANL 连接至 VCC 和接地等 电源,因此端接 电阻器的 额定功率 应考虑网络中 CAN 收发器的 短路电流保护。 CAN 是两线制 差分信号。 差分电压 VD 是高侧信号 CANH 与低侧 信号 CANL 之差。 逻辑值 1 由低 VD 表示, 称为隐性状态。 逻辑值 0 由高 VD 表示, 称为显性状态。 驱动器可以主动 将总线拉至显性状态, 但在没有驱动器 驱动显性信号时, 总线只能通过 端接电阻器上的 耗散被动返回 至隐性状态。 我们将在标题为 CAN 物理层和硬件的 TI 高精度实验室 视频以及标题为 CAN 协议和 CAN FD 的 TI 高精度实验室视频中 论述显性和隐性 状态的特性及其 对消息仲裁的影响。 汽车 CAN 接口 由 ISO11898 标准 规定,该标准 包括六个部分。 每个部分论述此处 显示的 CAN 的某个 特定方面。 例如,第二部分 称为 ISO11898-2, 其中论述高速 CAN 的 CAN 物理层。 第五部分在 第二部分概述的 要求中增加了 低功耗模式要求。 第六部分概述了 部分联网要求。 ISO11898 标准中 使用的命名 约定与汽车制造商 经常使用的术语类似。 很多时候,汽车 制造商会使用低速、 中速和高速等 术语来描述 CAN 数据速率。 这些名称可能 相对任意,甚至 在不同的汽车制造商 之间可能有所不同。 可以理解的是, 由于 ISO 标准使用 类似的命名规则,因此 这些名称可能会引起混淆。 低速容错 CAN 称为 LSFT CAN, 由 ISO11898 的 第三部分定义, 它以最高 125 千位/秒的速度 运行,该速度类似于 上面显示的汽车 低速 CAN 定义。 不过,对于所有 这三种汽车制造商 数据速率定义, 大多数汽车制造商 实际上在实施高速 CAN 或 HS CAN,它们 通常以最高 1 兆位/秒的速度运行, 由 ISO11898 的第 2、5 和 6 部分定义。 请注意,高速 CAN 完全覆盖了 低速容错 CAN 的 工作范围。 TXD 和 RXD 超时 时间将 CAN 收发器的低端 范围限制为 10 至 40 千位/秒。 当前,许多汽车使用 传统高速或 HS CAN。 具有灵活数据 速率的 CAN 或 CAN FD 是对传统 CAN 的增强, 能将可用宽带 增加至高达 5 兆位/秒。 还有许多其他 基于 CAN 的更高层 标准和协议,它们 决定着各种应用, 包括航空、农业、 嵌入式控制、 工业自动化、 军事、船舶和 安全关键型应用。 这些标准建立在 本演示概述的 ISO11898 标准基础 之上,其中许多 标准具有决定 电磁兼容性 和静电放电要求的 其他测试标准。 要查找更多 CAN 和 CAN FD 技术资源 以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。 此外,务必观看我们其他 有关 CAN、LIN 和 SBC 的 TI 高精度实验室视频。 谢谢观看。
大家好!
欢迎观看有关 通常称为 CAN
通信的控制器局域网 通信的 TI 高精度实验室视频。
该视频将介绍 CAN 收发器
用于通过 CAN 总线 进行通信的方法,
尤其是在 汽车应用中。
该介绍性 视频将包括
CAN 概述、标准 简介、物理层
介绍以及对不同 CAN 协议的论述。
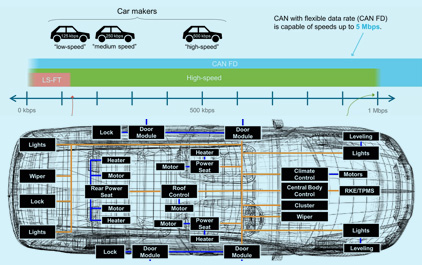
这是典型的汽车 车身网络示例。
汽车中的中央 车身控制装置
或任何类似的 主器件需要
与汽车中其他 通常远离主器件
本身的器件 进行通信,
以完成各种任务。
此处以蓝色 显示的 CAN 总线
允许组件在汽车中 彼此无缝通信。
以黄色显示的 LIN 总线 允许进一步扩展到
外围器件。
例如,使用该总线 网络,空调系统
可以与电动座椅 系统相连接,以激活
座椅加热器, 或者控制单元
可以在踩下 制动踏板时
激活制动灯。
该总线层次结构设计 可以节省线路成本。
线路是汽车中 最昂贵的部件之一。
它很重并且 通常手工组装。
因此,线路对汽车的 整体生产成本具有
直接的影响。
汽车设计人员使用 CAN 来 最大程度地减少汽车中的
线路,从而降低制造 成本并提高燃油效率。
CAN 是当今汽车中 使用的主要总线。
它使电动座椅、 车门模块和
空调单元等不同的 模块能够相互通信。
具有灵活数据 速率的 CAN 或 CAN FD
是通过该总线进行 通信的最常用的方法。
CAN 和 CAN FD 实现差分两线制
接口。
传统 CAN 的运行速率 最高为 1 兆位/秒,而
CAN FD 的运行速率 最高为 5 兆位/秒。
LIN 是以较低数据 速率运行的子总线。
CAN 标准为多点 总线应用中的
异步串行通信 定义了协议和
物理层。
每个节点由一个 MCU 中的 一个 CAN 收发器和一个 CAN
控制器构成。
传统 CAN 通过差分 总线以高达 1 兆位/秒的
数据速率进行通信, 而具有灵活数据速率的
CAN 以高达 5 兆位/秒的 数据速率进行通信。
CAN 专为与双绞线 电缆配合使用而设计。
网络应采用总线拓扑 结构进行布线,从而
尽可能限制 末梢区域数量。
用于 CAN 和 CAN FD 的 总线的两端应使用与
网络阻抗 匹配的电阻器
正确端接。
正确的端接有助于 减少等信号完整性问题,
例如反射。
如果从 总线中移除
节点,则设计人员在选择 放置端接电阻器的位置时
必须格外小心。
可以通过不同的 方法实现端接。
标准端接在总线的 两端各使用一个
端接电阻器。
一种替代方法 是分裂端接,
如右图所示, 它可以改善
信号完整性和 电磁发射特性。
它还可以 消除总线
共模电压 电平的波动,
同时保留 差分波动。
采用双绞线 布线的 CAN 总线
拓扑通常具有 120 欧姆的特性阻抗。
因此,正确的端接通常 需要使用 120 欧姆的
端接电阻器。
由于 CAN 网络将 CANH 和 CANL 连接至
VCC 和接地等 电源,因此端接
电阻器的 额定功率
应考虑网络中 CAN 收发器的
短路电流保护。
CAN 是两线制 差分信号。
差分电压 VD 是高侧信号
CANH 与低侧 信号 CANL
之差。
逻辑值 1 由低 VD 表示,
称为隐性状态。
逻辑值 0 由高 VD 表示,
称为显性状态。
驱动器可以主动 将总线拉至显性状态,
但在没有驱动器 驱动显性信号时,
总线只能通过 端接电阻器上的
耗散被动返回 至隐性状态。
我们将在标题为 CAN 物理层和硬件的
TI 高精度实验室 视频以及标题为
CAN 协议和 CAN FD 的 TI 高精度实验室视频中
论述显性和隐性 状态的特性及其
对消息仲裁的影响。
汽车 CAN 接口 由 ISO11898 标准
规定,该标准 包括六个部分。
每个部分论述此处 显示的 CAN 的某个
特定方面。
例如,第二部分 称为 ISO11898-2,
其中论述高速 CAN 的 CAN 物理层。
第五部分在 第二部分概述的
要求中增加了 低功耗模式要求。
第六部分概述了 部分联网要求。
ISO11898 标准中 使用的命名
约定与汽车制造商 经常使用的术语类似。
很多时候,汽车 制造商会使用低速、
中速和高速等 术语来描述 CAN
数据速率。
这些名称可能 相对任意,甚至
在不同的汽车制造商 之间可能有所不同。
可以理解的是, 由于 ISO 标准使用
类似的命名规则,因此 这些名称可能会引起混淆。
低速容错 CAN 称为 LSFT CAN,
由 ISO11898 的 第三部分定义,
它以最高 125 千位/秒的速度
运行,该速度类似于 上面显示的汽车
低速 CAN 定义。
不过,对于所有 这三种汽车制造商
数据速率定义, 大多数汽车制造商
实际上在实施高速 CAN 或 HS CAN,它们
通常以最高 1 兆位/秒的速度运行,
由 ISO11898 的第 2、5 和 6 部分定义。
请注意,高速 CAN 完全覆盖了
低速容错 CAN 的 工作范围。
TXD 和 RXD 超时 时间将 CAN
收发器的低端 范围限制为
10 至 40 千位/秒。
当前,许多汽车使用 传统高速或 HS CAN。
具有灵活数据 速率的 CAN 或 CAN FD
是对传统 CAN 的增强,
能将可用宽带 增加至高达
5 兆位/秒。
还有许多其他 基于 CAN 的更高层
标准和协议,它们 决定着各种应用,
包括航空、农业、 嵌入式控制、
工业自动化、 军事、船舶和
安全关键型应用。
这些标准建立在 本演示概述的
ISO11898 标准基础 之上,其中许多
标准具有决定 电磁兼容性
和静电放电要求的 其他测试标准。
要查找更多 CAN 和 CAN FD 技术资源
以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。
此外,务必观看我们其他 有关 CAN、LIN 和 SBC 的 TI
高精度实验室视频。
谢谢观看。
大家好! 欢迎观看有关 通常称为 CAN 通信的控制器局域网 通信的 TI 高精度实验室视频。 该视频将介绍 CAN 收发器 用于通过 CAN 总线 进行通信的方法, 尤其是在 汽车应用中。 该介绍性 视频将包括 CAN 概述、标准 简介、物理层 介绍以及对不同 CAN 协议的论述。 这是典型的汽车 车身网络示例。 汽车中的中央 车身控制装置 或任何类似的 主器件需要 与汽车中其他 通常远离主器件 本身的器件 进行通信, 以完成各种任务。 此处以蓝色 显示的 CAN 总线 允许组件在汽车中 彼此无缝通信。 以黄色显示的 LIN 总线 允许进一步扩展到 外围器件。 例如,使用该总线 网络,空调系统 可以与电动座椅 系统相连接,以激活 座椅加热器, 或者控制单元 可以在踩下 制动踏板时 激活制动灯。 该总线层次结构设计 可以节省线路成本。 线路是汽车中 最昂贵的部件之一。 它很重并且 通常手工组装。 因此,线路对汽车的 整体生产成本具有 直接的影响。 汽车设计人员使用 CAN 来 最大程度地减少汽车中的 线路,从而降低制造 成本并提高燃油效率。 CAN 是当今汽车中 使用的主要总线。 它使电动座椅、 车门模块和 空调单元等不同的 模块能够相互通信。 具有灵活数据 速率的 CAN 或 CAN FD 是通过该总线进行 通信的最常用的方法。 CAN 和 CAN FD 实现差分两线制 接口。 传统 CAN 的运行速率 最高为 1 兆位/秒,而 CAN FD 的运行速率 最高为 5 兆位/秒。 LIN 是以较低数据 速率运行的子总线。 CAN 标准为多点 总线应用中的 异步串行通信 定义了协议和 物理层。 每个节点由一个 MCU 中的 一个 CAN 收发器和一个 CAN 控制器构成。 传统 CAN 通过差分 总线以高达 1 兆位/秒的 数据速率进行通信, 而具有灵活数据速率的 CAN 以高达 5 兆位/秒的 数据速率进行通信。 CAN 专为与双绞线 电缆配合使用而设计。 网络应采用总线拓扑 结构进行布线,从而 尽可能限制 末梢区域数量。 用于 CAN 和 CAN FD 的 总线的两端应使用与 网络阻抗 匹配的电阻器 正确端接。 正确的端接有助于 减少等信号完整性问题, 例如反射。 如果从 总线中移除 节点,则设计人员在选择 放置端接电阻器的位置时 必须格外小心。 可以通过不同的 方法实现端接。 标准端接在总线的 两端各使用一个 端接电阻器。 一种替代方法 是分裂端接, 如右图所示, 它可以改善 信号完整性和 电磁发射特性。 它还可以 消除总线 共模电压 电平的波动, 同时保留 差分波动。 采用双绞线 布线的 CAN 总线 拓扑通常具有 120 欧姆的特性阻抗。 因此,正确的端接通常 需要使用 120 欧姆的 端接电阻器。 由于 CAN 网络将 CANH 和 CANL 连接至 VCC 和接地等 电源,因此端接 电阻器的 额定功率 应考虑网络中 CAN 收发器的 短路电流保护。 CAN 是两线制 差分信号。 差分电压 VD 是高侧信号 CANH 与低侧 信号 CANL 之差。 逻辑值 1 由低 VD 表示, 称为隐性状态。 逻辑值 0 由高 VD 表示, 称为显性状态。 驱动器可以主动 将总线拉至显性状态, 但在没有驱动器 驱动显性信号时, 总线只能通过 端接电阻器上的 耗散被动返回 至隐性状态。 我们将在标题为 CAN 物理层和硬件的 TI 高精度实验室 视频以及标题为 CAN 协议和 CAN FD 的 TI 高精度实验室视频中 论述显性和隐性 状态的特性及其 对消息仲裁的影响。 汽车 CAN 接口 由 ISO11898 标准 规定,该标准 包括六个部分。 每个部分论述此处 显示的 CAN 的某个 特定方面。 例如,第二部分 称为 ISO11898-2, 其中论述高速 CAN 的 CAN 物理层。 第五部分在 第二部分概述的 要求中增加了 低功耗模式要求。 第六部分概述了 部分联网要求。 ISO11898 标准中 使用的命名 约定与汽车制造商 经常使用的术语类似。 很多时候,汽车 制造商会使用低速、 中速和高速等 术语来描述 CAN 数据速率。 这些名称可能 相对任意,甚至 在不同的汽车制造商 之间可能有所不同。 可以理解的是, 由于 ISO 标准使用 类似的命名规则,因此 这些名称可能会引起混淆。 低速容错 CAN 称为 LSFT CAN, 由 ISO11898 的 第三部分定义, 它以最高 125 千位/秒的速度 运行,该速度类似于 上面显示的汽车 低速 CAN 定义。 不过,对于所有 这三种汽车制造商 数据速率定义, 大多数汽车制造商 实际上在实施高速 CAN 或 HS CAN,它们 通常以最高 1 兆位/秒的速度运行, 由 ISO11898 的第 2、5 和 6 部分定义。 请注意,高速 CAN 完全覆盖了 低速容错 CAN 的 工作范围。 TXD 和 RXD 超时 时间将 CAN 收发器的低端 范围限制为 10 至 40 千位/秒。 当前,许多汽车使用 传统高速或 HS CAN。 具有灵活数据 速率的 CAN 或 CAN FD 是对传统 CAN 的增强, 能将可用宽带 增加至高达 5 兆位/秒。 还有许多其他 基于 CAN 的更高层 标准和协议,它们 决定着各种应用, 包括航空、农业、 嵌入式控制、 工业自动化、 军事、船舶和 安全关键型应用。 这些标准建立在 本演示概述的 ISO11898 标准基础 之上,其中许多 标准具有决定 电磁兼容性 和静电放电要求的 其他测试标准。 要查找更多 CAN 和 CAN FD 技术资源 以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。 此外,务必观看我们其他 有关 CAN、LIN 和 SBC 的 TI 高精度实验室视频。 谢谢观看。
大家好!
欢迎观看有关 通常称为 CAN
通信的控制器局域网 通信的 TI 高精度实验室视频。
该视频将介绍 CAN 收发器
用于通过 CAN 总线 进行通信的方法,
尤其是在 汽车应用中。
该介绍性 视频将包括
CAN 概述、标准 简介、物理层
介绍以及对不同 CAN 协议的论述。
这是典型的汽车 车身网络示例。
汽车中的中央 车身控制装置
或任何类似的 主器件需要
与汽车中其他 通常远离主器件
本身的器件 进行通信,
以完成各种任务。
此处以蓝色 显示的 CAN 总线
允许组件在汽车中 彼此无缝通信。
以黄色显示的 LIN 总线 允许进一步扩展到
外围器件。
例如,使用该总线 网络,空调系统
可以与电动座椅 系统相连接,以激活
座椅加热器, 或者控制单元
可以在踩下 制动踏板时
激活制动灯。
该总线层次结构设计 可以节省线路成本。
线路是汽车中 最昂贵的部件之一。
它很重并且 通常手工组装。
因此,线路对汽车的 整体生产成本具有
直接的影响。
汽车设计人员使用 CAN 来 最大程度地减少汽车中的
线路,从而降低制造 成本并提高燃油效率。
CAN 是当今汽车中 使用的主要总线。
它使电动座椅、 车门模块和
空调单元等不同的 模块能够相互通信。
具有灵活数据 速率的 CAN 或 CAN FD
是通过该总线进行 通信的最常用的方法。
CAN 和 CAN FD 实现差分两线制
接口。
传统 CAN 的运行速率 最高为 1 兆位/秒,而
CAN FD 的运行速率 最高为 5 兆位/秒。
LIN 是以较低数据 速率运行的子总线。
CAN 标准为多点 总线应用中的
异步串行通信 定义了协议和
物理层。
每个节点由一个 MCU 中的 一个 CAN 收发器和一个 CAN
控制器构成。
传统 CAN 通过差分 总线以高达 1 兆位/秒的
数据速率进行通信, 而具有灵活数据速率的
CAN 以高达 5 兆位/秒的 数据速率进行通信。
CAN 专为与双绞线 电缆配合使用而设计。
网络应采用总线拓扑 结构进行布线,从而
尽可能限制 末梢区域数量。
用于 CAN 和 CAN FD 的 总线的两端应使用与
网络阻抗 匹配的电阻器
正确端接。
正确的端接有助于 减少等信号完整性问题,
例如反射。
如果从 总线中移除
节点,则设计人员在选择 放置端接电阻器的位置时
必须格外小心。
可以通过不同的 方法实现端接。
标准端接在总线的 两端各使用一个
端接电阻器。
一种替代方法 是分裂端接,
如右图所示, 它可以改善
信号完整性和 电磁发射特性。
它还可以 消除总线
共模电压 电平的波动,
同时保留 差分波动。
采用双绞线 布线的 CAN 总线
拓扑通常具有 120 欧姆的特性阻抗。
因此,正确的端接通常 需要使用 120 欧姆的
端接电阻器。
由于 CAN 网络将 CANH 和 CANL 连接至
VCC 和接地等 电源,因此端接
电阻器的 额定功率
应考虑网络中 CAN 收发器的
短路电流保护。
CAN 是两线制 差分信号。
差分电压 VD 是高侧信号
CANH 与低侧 信号 CANL
之差。
逻辑值 1 由低 VD 表示,
称为隐性状态。
逻辑值 0 由高 VD 表示,
称为显性状态。
驱动器可以主动 将总线拉至显性状态,
但在没有驱动器 驱动显性信号时,
总线只能通过 端接电阻器上的
耗散被动返回 至隐性状态。
我们将在标题为 CAN 物理层和硬件的
TI 高精度实验室 视频以及标题为
CAN 协议和 CAN FD 的 TI 高精度实验室视频中
论述显性和隐性 状态的特性及其
对消息仲裁的影响。
汽车 CAN 接口 由 ISO11898 标准
规定,该标准 包括六个部分。
每个部分论述此处 显示的 CAN 的某个
特定方面。
例如,第二部分 称为 ISO11898-2,
其中论述高速 CAN 的 CAN 物理层。
第五部分在 第二部分概述的
要求中增加了 低功耗模式要求。
第六部分概述了 部分联网要求。
ISO11898 标准中 使用的命名
约定与汽车制造商 经常使用的术语类似。
很多时候,汽车 制造商会使用低速、
中速和高速等 术语来描述 CAN
数据速率。
这些名称可能 相对任意,甚至
在不同的汽车制造商 之间可能有所不同。
可以理解的是, 由于 ISO 标准使用
类似的命名规则,因此 这些名称可能会引起混淆。
低速容错 CAN 称为 LSFT CAN,
由 ISO11898 的 第三部分定义,
它以最高 125 千位/秒的速度
运行,该速度类似于 上面显示的汽车
低速 CAN 定义。
不过,对于所有 这三种汽车制造商
数据速率定义, 大多数汽车制造商
实际上在实施高速 CAN 或 HS CAN,它们
通常以最高 1 兆位/秒的速度运行,
由 ISO11898 的第 2、5 和 6 部分定义。
请注意,高速 CAN 完全覆盖了
低速容错 CAN 的 工作范围。
TXD 和 RXD 超时 时间将 CAN
收发器的低端 范围限制为
10 至 40 千位/秒。
当前,许多汽车使用 传统高速或 HS CAN。
具有灵活数据 速率的 CAN 或 CAN FD
是对传统 CAN 的增强,
能将可用宽带 增加至高达
5 兆位/秒。
还有许多其他 基于 CAN 的更高层
标准和协议,它们 决定着各种应用,
包括航空、农业、 嵌入式控制、
工业自动化、 军事、船舶和
安全关键型应用。
这些标准建立在 本演示概述的
ISO11898 标准基础 之上,其中许多
标准具有决定 电磁兼容性
和静电放电要求的 其他测试标准。
要查找更多 CAN 和 CAN FD 技术资源
以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。
此外,务必观看我们其他 有关 CAN、LIN 和 SBC 的 TI
高精度实验室视频。
谢谢观看。
手机看
扫码用手机观看
 视频简介
视频简介
2.1 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD概述
所属课程:TI 高精度实验室 - CAN
发布时间:2020.01.13
视频集数:4
本节视频时长:00:08:22
了解如何使用CAN / LIN收发器和多功能系统基础芯片(SBC)进行设计。 TI Precision Labs(TIPL)是模拟信号链设计人员最全面的在线教室。该 接口系列 提供了通过工业,汽车和多种应用领域常用协议的技术培训。 从CAN&LIN系列开始,了解CAN和LIN标准,包括它们的物理层电信号特性,帧结构和数据通信协议。





 未学习 2.1 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD概述
未学习 2.1 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD概述
 未学习 2.2 TI 高精度实验室 - CAN/LIN/SBC:CAN物理层
未学习 2.2 TI 高精度实验室 - CAN/LIN/SBC:CAN物理层
 未学习 2.3 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD协议
未学习 2.3 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD协议
 未学习 2.4 TI 高精度实验室 - CAN/LIN/SBC:什么是 LIN?
未学习 2.4 TI 高精度实验室 - CAN/LIN/SBC:什么是 LIN?




