2.2 TI 高精度实验室 - CAN/LIN/SBC:CAN物理层
Loading the player...
将在30s后自动为您播放下一课程
[音乐播放] 大家好,感谢观看本次 有关 CAN 物理层和硬件的 TI 高精度 实验室视频。 本实验将讨论 控制器局域 网标准的电气 传输特性, 也称为物理层, 以及与该标准的 实现相关的硬件。 术语“物理层”指 在网络或计算机 网络的最低层上 进行原始位传输。 我们曾提到 CAN 使用两线制 差分接口。 这里所说的“两线”是 CANH 和 CANL, 这两条线之间的 电压差称为 VD。 为了发送逻辑 零,同时将 CANH 和 CANL 引脚分别 拉高和拉低, 这将使差分 电压 VD 达到 0.9 伏以上, 这称为显性 状态。 为了传输 逻辑一,驱动 程序释放 这些引脚, 并且 VD 在端接 电阻器上耗散。 这会使 CANH 和 CANL 返回到共模电压 VCM,并将 VD 降低 到 0.5 伏以下,这称为 隐性状态。 重申一下, 逻辑零是显性状态, 即高于 0.9 伏的 差分电压; 而逻辑一是 隐性状态, 即低于 0.5 伏的 差分电压。 看看屏幕 中间显示的 红色和蓝色 CAN 线的上升沿 和下降沿。 请注意, 向显性的 转换非常尖锐, 而向隐性的转换 不那么尖锐。 这是因为 CAN 驱动器拓扑 允许 CAN 驱动器将 CANH 线 驱动为高电平并将 CANL 线 驱动为低电平,但不 允许它们将这些线 驱动回至 VCM。 相反,总线 通过端接 电阻器上的 无源耗散 从显性状态 返回到隐性状态。 因此,逻辑零 称为显性状态, 逻辑一称为 隐性状态。 如果总线上有任何 单个器件传输显性信号, 它将始终覆盖同时 从另一个器件发送的 隐性信号。 如果允许同一 总线上的器件 同时驱动显性 信号和隐性信号, 则可能会发生 竞争器件导致 不同电源轨之间 短路的情况。 CAN 使用此特性 来确保发送 具有较高优先级的 消息而不破坏信号。 每个 CAN 位 都分为此处 显示的四个段, 样本点通常位于 位宽的 75% 点处。 第一个段 称为同步 段,是预期会 发生隐性到 显性转换的时间。 总线上的所有节点 在上升沿进行同步。 第二段是 传播时间段, 用于补偿 网络的物理 延迟时间。 第三个段和第四个 段都是相位缓冲段, 用于重新同步。 接收器紧随相位 段一之后对位值 进行采样。 此处的图显示了 CAN 网络的典型设置。 请注意该设置中 使用的双绞线电缆。 如我们的简介和概述 高精度实验室中所述, 传统 CAN 通过差分 总线以高达 1 兆位/秒的 数据速率进行通信, 而具有灵活数据速率的 CAN 或 CAN FD 以高达 5 兆位/秒的数据速率 进行通信。 不过,特定 CAN 网络的 最大运行速率 取决于多个因素。 此处以红色椭圆形显示的 是 CAN 总线电缆的长度。 该电缆上的 传播时间 是限制网络 最大工作 速率的最重要 驱动因素之一。 较长的电缆意味着 较长的总线传播时间, 通常具有每米 5 纳秒的权衡。 其他考虑因素 包括系统中任何 隔离引起的 延迟,此处以 绿色显示,以及 收发器引起的延迟。 尽管存在 控制器 I/O 延迟, 但在这种环境下 通常可以忽略不计。 系统的总往返 延迟是这些 组件引起的 总延迟的两倍。 由于总线长度 通常是驱动因素, 因此我们可以确定 总线长度与最大信号 传输速率之间的 一般权衡,在总线 长度超过 40 米之后这两者 之间开始形成 反比关系。 如果减少一项诸如收发器 延迟之类的因素,则可以为 包括更大的电缆长度 在内的其他类型延迟 分配更多的预算。 在我们标题为 CAN 协议 和 CAN FD 的 TI 高精度 实验室视频中,我们 回顾了仲裁的概念。 仲裁是 CAN 网络的关键, 因此了解环路 和往返延迟对于 确定适当的采样点 而言至关重要。 否则,较快的节点 可能会在较慢的 节点位状态传输 之前对总线进行采样。 有关定时和同步的 特定参数 可以在 CAN 控制器中设置, 以适应传播延迟。 这是 8 引脚 CAN 和 CAN FD 标准引脚。 所有八引脚 收发器均具有 TXD、RXD、CANH 和 CANL 引脚以及 VCC 和接地。 引脚五和八可 用于某些其他 收发器功能。 许多收发器使用 器件上的引脚八 实现低功耗 模式,其中 最常见的是待机 模式、静音模式和 睡眠模式。 引脚五可以具有 某些功能之一, 也可以不连接。 VIO 引脚为收发器 IO 引脚、TXD 和 RXD 提供单独的 电源电压。 不常见的分裂 引脚通过两个 输出提供 VCC,以便 为使用分裂终端的 应用稳定总线共模电压。 故障甚至比 8 引脚 收发器上的分裂更少见。 这是汽车的 典型 CAN 节点 配置示例。 网络中的每个节点 都有一个处理器, 例如该 TMS570, 它与该 TCAN1042 等收发器相连接。 收发器与 CAN 或 CAN FD 总线相连接。 许多微处理器 和收发器通过 处理器内的 CAN 控制器 使用 TXD 和 RXD 相互通信。 一些系统可能 还具有可选的 外部组件, 包括分裂终端、 用于在 CAN 总线上 提供额外 ESD 或 瞬态保护的二极管、 共模总线稳定输出 或外部上拉电阻器, 以适应需要它们 以实现快速数据速率的 MCU。 14 引脚 CAN 收发器 与 8 引脚收发器 具有相同的 基本功能,但 增加了一些附加功能, 例如能够使用低功耗 模式来实现电池 供电的操作并向 系统的其余部分 发出信号,以根据 通过 CAN 总线 发出的唤醒 命令启动。 当接收器发生 显性超时时,故障 引脚发出错误信号。 请注意,14 引脚收发器 具有与 8 引脚器件 相同的引脚映射。 这使 8 引脚器件 能够随时轻松 替代应用中的 14 引脚器件。 这是 14 引脚 CAN 收发器的典型应用。 我们可以看到, 此处所示的 8 引脚 应用采用相同的 基本电路,但还 具有其他用于 使能、故障、唤醒、 电源电压和 禁止的接口。 在正常运行时, CAN 和 CAN FD 收发器消耗 一定量的电源 电流,这使驱动器 和接收器能够运行。 例如,SN65HVD23x 系列通常消耗 6 毫安的电源电流。 不过,与小型 收发器一样, 该器件系列具有通过引脚 八控制的待机和睡眠模式。 当器件被置于 待机模式时, 接收器保持活动状态, 并充当总线的从器件。 不过驱动器关闭。 在该仅侦听 状态下, 收发器对总线 完全是被动的。 在睡眠模式下, 驱动器和 接收器均关闭。 在该超低功耗 模式下,总线 引脚处于高阻抗状态, 而 TXD 和 RXD 引脚 默认处于逻辑高电平。 器件保持在 待机或睡眠模式, 直到处理器通过 引脚八停用该模式。 要查找更多 CAN 和 CAN FD 技术资源 以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。 此外,务必观看我们其他 有关控制器局域网的 TI 高精度实验室视频。 谢谢观看。
[音乐播放] 大家好,感谢观看本次 有关 CAN 物理层和硬件的 TI 高精度 实验室视频。 本实验将讨论 控制器局域 网标准的电气 传输特性, 也称为物理层, 以及与该标准的 实现相关的硬件。 术语“物理层”指 在网络或计算机 网络的最低层上 进行原始位传输。 我们曾提到 CAN 使用两线制 差分接口。 这里所说的“两线”是 CANH 和 CANL, 这两条线之间的 电压差称为 VD。 为了发送逻辑 零,同时将 CANH 和 CANL 引脚分别 拉高和拉低, 这将使差分 电压 VD 达到 0.9 伏以上, 这称为显性 状态。 为了传输 逻辑一,驱动 程序释放 这些引脚, 并且 VD 在端接 电阻器上耗散。 这会使 CANH 和 CANL 返回到共模电压 VCM,并将 VD 降低 到 0.5 伏以下,这称为 隐性状态。 重申一下, 逻辑零是显性状态, 即高于 0.9 伏的 差分电压; 而逻辑一是 隐性状态, 即低于 0.5 伏的 差分电压。 看看屏幕 中间显示的 红色和蓝色 CAN 线的上升沿 和下降沿。 请注意, 向显性的 转换非常尖锐, 而向隐性的转换 不那么尖锐。 这是因为 CAN 驱动器拓扑 允许 CAN 驱动器将 CANH 线 驱动为高电平并将 CANL 线 驱动为低电平,但不 允许它们将这些线 驱动回至 VCM。 相反,总线 通过端接 电阻器上的 无源耗散 从显性状态 返回到隐性状态。 因此,逻辑零 称为显性状态, 逻辑一称为 隐性状态。 如果总线上有任何 单个器件传输显性信号, 它将始终覆盖同时 从另一个器件发送的 隐性信号。 如果允许同一 总线上的器件 同时驱动显性 信号和隐性信号, 则可能会发生 竞争器件导致 不同电源轨之间 短路的情况。 CAN 使用此特性 来确保发送 具有较高优先级的 消息而不破坏信号。 每个 CAN 位 都分为此处 显示的四个段, 样本点通常位于 位宽的 75% 点处。 第一个段 称为同步 段,是预期会 发生隐性到 显性转换的时间。 总线上的所有节点 在上升沿进行同步。 第二段是 传播时间段, 用于补偿 网络的物理 延迟时间。 第三个段和第四个 段都是相位缓冲段, 用于重新同步。 接收器紧随相位 段一之后对位值 进行采样。 此处的图显示了 CAN 网络的典型设置。 请注意该设置中 使用的双绞线电缆。 如我们的简介和概述 高精度实验室中所述, 传统 CAN 通过差分 总线以高达 1 兆位/秒的 数据速率进行通信, 而具有灵活数据速率的 CAN 或 CAN FD 以高达 5 兆位/秒的数据速率 进行通信。 不过,特定 CAN 网络的 最大运行速率 取决于多个因素。 此处以红色椭圆形显示的 是 CAN 总线电缆的长度。 该电缆上的 传播时间 是限制网络 最大工作 速率的最重要 驱动因素之一。 较长的电缆意味着 较长的总线传播时间, 通常具有每米 5 纳秒的权衡。 其他考虑因素 包括系统中任何 隔离引起的 延迟,此处以 绿色显示,以及 收发器引起的延迟。 尽管存在 控制器 I/O 延迟, 但在这种环境下 通常可以忽略不计。 系统的总往返 延迟是这些 组件引起的 总延迟的两倍。 由于总线长度 通常是驱动因素, 因此我们可以确定 总线长度与最大信号 传输速率之间的 一般权衡,在总线 长度超过 40 米之后这两者 之间开始形成 反比关系。 如果减少一项诸如收发器 延迟之类的因素,则可以为 包括更大的电缆长度 在内的其他类型延迟 分配更多的预算。 在我们标题为 CAN 协议 和 CAN FD 的 TI 高精度 实验室视频中,我们 回顾了仲裁的概念。 仲裁是 CAN 网络的关键, 因此了解环路 和往返延迟对于 确定适当的采样点 而言至关重要。 否则,较快的节点 可能会在较慢的 节点位状态传输 之前对总线进行采样。 有关定时和同步的 特定参数 可以在 CAN 控制器中设置, 以适应传播延迟。 这是 8 引脚 CAN 和 CAN FD 标准引脚。 所有八引脚 收发器均具有 TXD、RXD、CANH 和 CANL 引脚以及 VCC 和接地。 引脚五和八可 用于某些其他 收发器功能。 许多收发器使用 器件上的引脚八 实现低功耗 模式,其中 最常见的是待机 模式、静音模式和 睡眠模式。 引脚五可以具有 某些功能之一, 也可以不连接。 VIO 引脚为收发器 IO 引脚、TXD 和 RXD 提供单独的 电源电压。 不常见的分裂 引脚通过两个 输出提供 VCC,以便 为使用分裂终端的 应用稳定总线共模电压。 故障甚至比 8 引脚 收发器上的分裂更少见。 这是汽车的 典型 CAN 节点 配置示例。 网络中的每个节点 都有一个处理器, 例如该 TMS570, 它与该 TCAN1042 等收发器相连接。 收发器与 CAN 或 CAN FD 总线相连接。 许多微处理器 和收发器通过 处理器内的 CAN 控制器 使用 TXD 和 RXD 相互通信。 一些系统可能 还具有可选的 外部组件, 包括分裂终端、 用于在 CAN 总线上 提供额外 ESD 或 瞬态保护的二极管、 共模总线稳定输出 或外部上拉电阻器, 以适应需要它们 以实现快速数据速率的 MCU。 14 引脚 CAN 收发器 与 8 引脚收发器 具有相同的 基本功能,但 增加了一些附加功能, 例如能够使用低功耗 模式来实现电池 供电的操作并向 系统的其余部分 发出信号,以根据 通过 CAN 总线 发出的唤醒 命令启动。 当接收器发生 显性超时时,故障 引脚发出错误信号。 请注意,14 引脚收发器 具有与 8 引脚器件 相同的引脚映射。 这使 8 引脚器件 能够随时轻松 替代应用中的 14 引脚器件。 这是 14 引脚 CAN 收发器的典型应用。 我们可以看到, 此处所示的 8 引脚 应用采用相同的 基本电路,但还 具有其他用于 使能、故障、唤醒、 电源电压和 禁止的接口。 在正常运行时, CAN 和 CAN FD 收发器消耗 一定量的电源 电流,这使驱动器 和接收器能够运行。 例如,SN65HVD23x 系列通常消耗 6 毫安的电源电流。 不过,与小型 收发器一样, 该器件系列具有通过引脚 八控制的待机和睡眠模式。 当器件被置于 待机模式时, 接收器保持活动状态, 并充当总线的从器件。 不过驱动器关闭。 在该仅侦听 状态下, 收发器对总线 完全是被动的。 在睡眠模式下, 驱动器和 接收器均关闭。 在该超低功耗 模式下,总线 引脚处于高阻抗状态, 而 TXD 和 RXD 引脚 默认处于逻辑高电平。 器件保持在 待机或睡眠模式, 直到处理器通过 引脚八停用该模式。 要查找更多 CAN 和 CAN FD 技术资源 以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。 此外,务必观看我们其他 有关控制器局域网的 TI 高精度实验室视频。 谢谢观看。
[音乐播放]
大家好,感谢观看本次 有关 CAN 物理层和硬件的
TI 高精度 实验室视频。
本实验将讨论 控制器局域
网标准的电气 传输特性,
也称为物理层, 以及与该标准的
实现相关的硬件。
术语“物理层”指 在网络或计算机
网络的最低层上 进行原始位传输。
我们曾提到 CAN 使用两线制
差分接口。
这里所说的“两线”是 CANH 和 CANL,
这两条线之间的 电压差称为 VD。
为了发送逻辑 零,同时将 CANH
和 CANL 引脚分别 拉高和拉低,
这将使差分 电压 VD 达到
0.9 伏以上, 这称为显性
状态。
为了传输 逻辑一,驱动
程序释放 这些引脚,
并且 VD 在端接 电阻器上耗散。
这会使 CANH 和 CANL 返回到共模电压
VCM,并将 VD 降低 到 0.5 伏以下,这称为
隐性状态。
重申一下, 逻辑零是显性状态,
即高于 0.9 伏的 差分电压;
而逻辑一是 隐性状态,
即低于 0.5 伏的 差分电压。
看看屏幕 中间显示的
红色和蓝色 CAN 线的上升沿
和下降沿。
请注意, 向显性的
转换非常尖锐, 而向隐性的转换
不那么尖锐。
这是因为 CAN 驱动器拓扑
允许 CAN 驱动器将 CANH 线 驱动为高电平并将 CANL 线
驱动为低电平,但不 允许它们将这些线
驱动回至 VCM。
相反,总线 通过端接
电阻器上的 无源耗散
从显性状态 返回到隐性状态。
因此,逻辑零 称为显性状态,
逻辑一称为 隐性状态。
如果总线上有任何 单个器件传输显性信号,
它将始终覆盖同时 从另一个器件发送的
隐性信号。
如果允许同一 总线上的器件
同时驱动显性 信号和隐性信号,
则可能会发生 竞争器件导致
不同电源轨之间 短路的情况。
CAN 使用此特性 来确保发送
具有较高优先级的 消息而不破坏信号。
每个 CAN 位 都分为此处
显示的四个段, 样本点通常位于
位宽的 75% 点处。
第一个段 称为同步
段,是预期会 发生隐性到
显性转换的时间。
总线上的所有节点 在上升沿进行同步。
第二段是 传播时间段,
用于补偿 网络的物理
延迟时间。
第三个段和第四个 段都是相位缓冲段,
用于重新同步。
接收器紧随相位 段一之后对位值
进行采样。
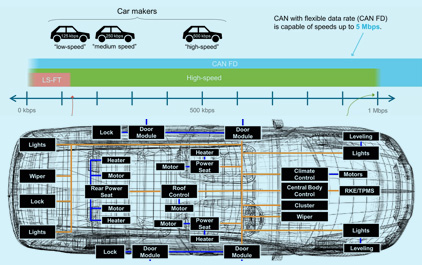
此处的图显示了 CAN 网络的典型设置。
请注意该设置中 使用的双绞线电缆。
如我们的简介和概述 高精度实验室中所述,
传统 CAN 通过差分 总线以高达 1 兆位/秒的
数据速率进行通信, 而具有灵活数据速率的
CAN 或 CAN FD 以高达 5 兆位/秒的数据速率
进行通信。
不过,特定 CAN 网络的
最大运行速率 取决于多个因素。
此处以红色椭圆形显示的 是 CAN 总线电缆的长度。
该电缆上的 传播时间
是限制网络 最大工作
速率的最重要 驱动因素之一。
较长的电缆意味着 较长的总线传播时间,
通常具有每米 5 纳秒的权衡。
其他考虑因素 包括系统中任何
隔离引起的 延迟,此处以
绿色显示,以及 收发器引起的延迟。
尽管存在 控制器 I/O 延迟,
但在这种环境下 通常可以忽略不计。
系统的总往返 延迟是这些
组件引起的 总延迟的两倍。
由于总线长度 通常是驱动因素,
因此我们可以确定 总线长度与最大信号
传输速率之间的 一般权衡,在总线
长度超过 40 米之后这两者
之间开始形成 反比关系。
如果减少一项诸如收发器 延迟之类的因素,则可以为
包括更大的电缆长度 在内的其他类型延迟
分配更多的预算。
在我们标题为 CAN 协议 和 CAN FD 的 TI 高精度
实验室视频中,我们 回顾了仲裁的概念。
仲裁是 CAN 网络的关键,
因此了解环路 和往返延迟对于
确定适当的采样点 而言至关重要。
否则,较快的节点 可能会在较慢的
节点位状态传输 之前对总线进行采样。
有关定时和同步的 特定参数
可以在 CAN 控制器中设置,
以适应传播延迟。
这是 8 引脚 CAN 和 CAN FD 标准引脚。
所有八引脚 收发器均具有
TXD、RXD、CANH 和 CANL 引脚以及 VCC 和接地。
引脚五和八可 用于某些其他
收发器功能。
许多收发器使用 器件上的引脚八
实现低功耗 模式,其中
最常见的是待机 模式、静音模式和
睡眠模式。
引脚五可以具有 某些功能之一,
也可以不连接。
VIO 引脚为收发器 IO 引脚、TXD 和 RXD
提供单独的 电源电压。
不常见的分裂 引脚通过两个
输出提供 VCC,以便 为使用分裂终端的
应用稳定总线共模电压。
故障甚至比 8 引脚 收发器上的分裂更少见。
这是汽车的 典型 CAN 节点
配置示例。
网络中的每个节点 都有一个处理器,
例如该 TMS570, 它与该 TCAN1042
等收发器相连接。
收发器与 CAN 或 CAN FD 总线相连接。
许多微处理器 和收发器通过
处理器内的 CAN 控制器
使用 TXD 和 RXD 相互通信。
一些系统可能 还具有可选的
外部组件, 包括分裂终端、
用于在 CAN 总线上 提供额外 ESD 或
瞬态保护的二极管、 共模总线稳定输出
或外部上拉电阻器, 以适应需要它们
以实现快速数据速率的 MCU。
14 引脚 CAN 收发器 与 8 引脚收发器
具有相同的 基本功能,但
增加了一些附加功能, 例如能够使用低功耗
模式来实现电池 供电的操作并向
系统的其余部分 发出信号,以根据
通过 CAN 总线 发出的唤醒
命令启动。
当接收器发生 显性超时时,故障
引脚发出错误信号。
请注意,14 引脚收发器
具有与 8 引脚器件 相同的引脚映射。
这使 8 引脚器件 能够随时轻松
替代应用中的 14 引脚器件。
这是 14 引脚 CAN 收发器的典型应用。
我们可以看到, 此处所示的 8 引脚
应用采用相同的 基本电路,但还
具有其他用于 使能、故障、唤醒、
电源电压和 禁止的接口。
在正常运行时, CAN 和 CAN FD
收发器消耗 一定量的电源
电流,这使驱动器 和接收器能够运行。
例如,SN65HVD23x 系列通常消耗
6 毫安的电源电流。
不过,与小型 收发器一样,
该器件系列具有通过引脚 八控制的待机和睡眠模式。
当器件被置于 待机模式时,
接收器保持活动状态, 并充当总线的从器件。
不过驱动器关闭。
在该仅侦听 状态下,
收发器对总线 完全是被动的。
在睡眠模式下, 驱动器和
接收器均关闭。
在该超低功耗 模式下,总线
引脚处于高阻抗状态, 而 TXD 和 RXD 引脚
默认处于逻辑高电平。
器件保持在 待机或睡眠模式,
直到处理器通过 引脚八停用该模式。
要查找更多 CAN 和 CAN FD 技术资源
以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。
此外,务必观看我们其他 有关控制器局域网的
TI 高精度实验室视频。
谢谢观看。
[音乐播放] 大家好,感谢观看本次 有关 CAN 物理层和硬件的 TI 高精度 实验室视频。 本实验将讨论 控制器局域 网标准的电气 传输特性, 也称为物理层, 以及与该标准的 实现相关的硬件。 术语“物理层”指 在网络或计算机 网络的最低层上 进行原始位传输。 我们曾提到 CAN 使用两线制 差分接口。 这里所说的“两线”是 CANH 和 CANL, 这两条线之间的 电压差称为 VD。 为了发送逻辑 零,同时将 CANH 和 CANL 引脚分别 拉高和拉低, 这将使差分 电压 VD 达到 0.9 伏以上, 这称为显性 状态。 为了传输 逻辑一,驱动 程序释放 这些引脚, 并且 VD 在端接 电阻器上耗散。 这会使 CANH 和 CANL 返回到共模电压 VCM,并将 VD 降低 到 0.5 伏以下,这称为 隐性状态。 重申一下, 逻辑零是显性状态, 即高于 0.9 伏的 差分电压; 而逻辑一是 隐性状态, 即低于 0.5 伏的 差分电压。 看看屏幕 中间显示的 红色和蓝色 CAN 线的上升沿 和下降沿。 请注意, 向显性的 转换非常尖锐, 而向隐性的转换 不那么尖锐。 这是因为 CAN 驱动器拓扑 允许 CAN 驱动器将 CANH 线 驱动为高电平并将 CANL 线 驱动为低电平,但不 允许它们将这些线 驱动回至 VCM。 相反,总线 通过端接 电阻器上的 无源耗散 从显性状态 返回到隐性状态。 因此,逻辑零 称为显性状态, 逻辑一称为 隐性状态。 如果总线上有任何 单个器件传输显性信号, 它将始终覆盖同时 从另一个器件发送的 隐性信号。 如果允许同一 总线上的器件 同时驱动显性 信号和隐性信号, 则可能会发生 竞争器件导致 不同电源轨之间 短路的情况。 CAN 使用此特性 来确保发送 具有较高优先级的 消息而不破坏信号。 每个 CAN 位 都分为此处 显示的四个段, 样本点通常位于 位宽的 75% 点处。 第一个段 称为同步 段,是预期会 发生隐性到 显性转换的时间。 总线上的所有节点 在上升沿进行同步。 第二段是 传播时间段, 用于补偿 网络的物理 延迟时间。 第三个段和第四个 段都是相位缓冲段, 用于重新同步。 接收器紧随相位 段一之后对位值 进行采样。 此处的图显示了 CAN 网络的典型设置。 请注意该设置中 使用的双绞线电缆。 如我们的简介和概述 高精度实验室中所述, 传统 CAN 通过差分 总线以高达 1 兆位/秒的 数据速率进行通信, 而具有灵活数据速率的 CAN 或 CAN FD 以高达 5 兆位/秒的数据速率 进行通信。 不过,特定 CAN 网络的 最大运行速率 取决于多个因素。 此处以红色椭圆形显示的 是 CAN 总线电缆的长度。 该电缆上的 传播时间 是限制网络 最大工作 速率的最重要 驱动因素之一。 较长的电缆意味着 较长的总线传播时间, 通常具有每米 5 纳秒的权衡。 其他考虑因素 包括系统中任何 隔离引起的 延迟,此处以 绿色显示,以及 收发器引起的延迟。 尽管存在 控制器 I/O 延迟, 但在这种环境下 通常可以忽略不计。 系统的总往返 延迟是这些 组件引起的 总延迟的两倍。 由于总线长度 通常是驱动因素, 因此我们可以确定 总线长度与最大信号 传输速率之间的 一般权衡,在总线 长度超过 40 米之后这两者 之间开始形成 反比关系。 如果减少一项诸如收发器 延迟之类的因素,则可以为 包括更大的电缆长度 在内的其他类型延迟 分配更多的预算。 在我们标题为 CAN 协议 和 CAN FD 的 TI 高精度 实验室视频中,我们 回顾了仲裁的概念。 仲裁是 CAN 网络的关键, 因此了解环路 和往返延迟对于 确定适当的采样点 而言至关重要。 否则,较快的节点 可能会在较慢的 节点位状态传输 之前对总线进行采样。 有关定时和同步的 特定参数 可以在 CAN 控制器中设置, 以适应传播延迟。 这是 8 引脚 CAN 和 CAN FD 标准引脚。 所有八引脚 收发器均具有 TXD、RXD、CANH 和 CANL 引脚以及 VCC 和接地。 引脚五和八可 用于某些其他 收发器功能。 许多收发器使用 器件上的引脚八 实现低功耗 模式,其中 最常见的是待机 模式、静音模式和 睡眠模式。 引脚五可以具有 某些功能之一, 也可以不连接。 VIO 引脚为收发器 IO 引脚、TXD 和 RXD 提供单独的 电源电压。 不常见的分裂 引脚通过两个 输出提供 VCC,以便 为使用分裂终端的 应用稳定总线共模电压。 故障甚至比 8 引脚 收发器上的分裂更少见。 这是汽车的 典型 CAN 节点 配置示例。 网络中的每个节点 都有一个处理器, 例如该 TMS570, 它与该 TCAN1042 等收发器相连接。 收发器与 CAN 或 CAN FD 总线相连接。 许多微处理器 和收发器通过 处理器内的 CAN 控制器 使用 TXD 和 RXD 相互通信。 一些系统可能 还具有可选的 外部组件, 包括分裂终端、 用于在 CAN 总线上 提供额外 ESD 或 瞬态保护的二极管、 共模总线稳定输出 或外部上拉电阻器, 以适应需要它们 以实现快速数据速率的 MCU。 14 引脚 CAN 收发器 与 8 引脚收发器 具有相同的 基本功能,但 增加了一些附加功能, 例如能够使用低功耗 模式来实现电池 供电的操作并向 系统的其余部分 发出信号,以根据 通过 CAN 总线 发出的唤醒 命令启动。 当接收器发生 显性超时时,故障 引脚发出错误信号。 请注意,14 引脚收发器 具有与 8 引脚器件 相同的引脚映射。 这使 8 引脚器件 能够随时轻松 替代应用中的 14 引脚器件。 这是 14 引脚 CAN 收发器的典型应用。 我们可以看到, 此处所示的 8 引脚 应用采用相同的 基本电路,但还 具有其他用于 使能、故障、唤醒、 电源电压和 禁止的接口。 在正常运行时, CAN 和 CAN FD 收发器消耗 一定量的电源 电流,这使驱动器 和接收器能够运行。 例如,SN65HVD23x 系列通常消耗 6 毫安的电源电流。 不过,与小型 收发器一样, 该器件系列具有通过引脚 八控制的待机和睡眠模式。 当器件被置于 待机模式时, 接收器保持活动状态, 并充当总线的从器件。 不过驱动器关闭。 在该仅侦听 状态下, 收发器对总线 完全是被动的。 在睡眠模式下, 驱动器和 接收器均关闭。 在该超低功耗 模式下,总线 引脚处于高阻抗状态, 而 TXD 和 RXD 引脚 默认处于逻辑高电平。 器件保持在 待机或睡眠模式, 直到处理器通过 引脚八停用该模式。 要查找更多 CAN 和 CAN FD 技术资源 以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。 此外,务必观看我们其他 有关控制器局域网的 TI 高精度实验室视频。 谢谢观看。
[音乐播放]
大家好,感谢观看本次 有关 CAN 物理层和硬件的
TI 高精度 实验室视频。
本实验将讨论 控制器局域
网标准的电气 传输特性,
也称为物理层, 以及与该标准的
实现相关的硬件。
术语“物理层”指 在网络或计算机
网络的最低层上 进行原始位传输。
我们曾提到 CAN 使用两线制
差分接口。
这里所说的“两线”是 CANH 和 CANL,
这两条线之间的 电压差称为 VD。
为了发送逻辑 零,同时将 CANH
和 CANL 引脚分别 拉高和拉低,
这将使差分 电压 VD 达到
0.9 伏以上, 这称为显性
状态。
为了传输 逻辑一,驱动
程序释放 这些引脚,
并且 VD 在端接 电阻器上耗散。
这会使 CANH 和 CANL 返回到共模电压
VCM,并将 VD 降低 到 0.5 伏以下,这称为
隐性状态。
重申一下, 逻辑零是显性状态,
即高于 0.9 伏的 差分电压;
而逻辑一是 隐性状态,
即低于 0.5 伏的 差分电压。
看看屏幕 中间显示的
红色和蓝色 CAN 线的上升沿
和下降沿。
请注意, 向显性的
转换非常尖锐, 而向隐性的转换
不那么尖锐。
这是因为 CAN 驱动器拓扑
允许 CAN 驱动器将 CANH 线 驱动为高电平并将 CANL 线
驱动为低电平,但不 允许它们将这些线
驱动回至 VCM。
相反,总线 通过端接
电阻器上的 无源耗散
从显性状态 返回到隐性状态。
因此,逻辑零 称为显性状态,
逻辑一称为 隐性状态。
如果总线上有任何 单个器件传输显性信号,
它将始终覆盖同时 从另一个器件发送的
隐性信号。
如果允许同一 总线上的器件
同时驱动显性 信号和隐性信号,
则可能会发生 竞争器件导致
不同电源轨之间 短路的情况。
CAN 使用此特性 来确保发送
具有较高优先级的 消息而不破坏信号。
每个 CAN 位 都分为此处
显示的四个段, 样本点通常位于
位宽的 75% 点处。
第一个段 称为同步
段,是预期会 发生隐性到
显性转换的时间。
总线上的所有节点 在上升沿进行同步。
第二段是 传播时间段,
用于补偿 网络的物理
延迟时间。
第三个段和第四个 段都是相位缓冲段,
用于重新同步。
接收器紧随相位 段一之后对位值
进行采样。
此处的图显示了 CAN 网络的典型设置。
请注意该设置中 使用的双绞线电缆。
如我们的简介和概述 高精度实验室中所述,
传统 CAN 通过差分 总线以高达 1 兆位/秒的
数据速率进行通信, 而具有灵活数据速率的
CAN 或 CAN FD 以高达 5 兆位/秒的数据速率
进行通信。
不过,特定 CAN 网络的
最大运行速率 取决于多个因素。
此处以红色椭圆形显示的 是 CAN 总线电缆的长度。
该电缆上的 传播时间
是限制网络 最大工作
速率的最重要 驱动因素之一。
较长的电缆意味着 较长的总线传播时间,
通常具有每米 5 纳秒的权衡。
其他考虑因素 包括系统中任何
隔离引起的 延迟,此处以
绿色显示,以及 收发器引起的延迟。
尽管存在 控制器 I/O 延迟,
但在这种环境下 通常可以忽略不计。
系统的总往返 延迟是这些
组件引起的 总延迟的两倍。
由于总线长度 通常是驱动因素,
因此我们可以确定 总线长度与最大信号
传输速率之间的 一般权衡,在总线
长度超过 40 米之后这两者
之间开始形成 反比关系。
如果减少一项诸如收发器 延迟之类的因素,则可以为
包括更大的电缆长度 在内的其他类型延迟
分配更多的预算。
在我们标题为 CAN 协议 和 CAN FD 的 TI 高精度
实验室视频中,我们 回顾了仲裁的概念。
仲裁是 CAN 网络的关键,
因此了解环路 和往返延迟对于
确定适当的采样点 而言至关重要。
否则,较快的节点 可能会在较慢的
节点位状态传输 之前对总线进行采样。
有关定时和同步的 特定参数
可以在 CAN 控制器中设置,
以适应传播延迟。
这是 8 引脚 CAN 和 CAN FD 标准引脚。
所有八引脚 收发器均具有
TXD、RXD、CANH 和 CANL 引脚以及 VCC 和接地。
引脚五和八可 用于某些其他
收发器功能。
许多收发器使用 器件上的引脚八
实现低功耗 模式,其中
最常见的是待机 模式、静音模式和
睡眠模式。
引脚五可以具有 某些功能之一,
也可以不连接。
VIO 引脚为收发器 IO 引脚、TXD 和 RXD
提供单独的 电源电压。
不常见的分裂 引脚通过两个
输出提供 VCC,以便 为使用分裂终端的
应用稳定总线共模电压。
故障甚至比 8 引脚 收发器上的分裂更少见。
这是汽车的 典型 CAN 节点
配置示例。
网络中的每个节点 都有一个处理器,
例如该 TMS570, 它与该 TCAN1042
等收发器相连接。
收发器与 CAN 或 CAN FD 总线相连接。
许多微处理器 和收发器通过
处理器内的 CAN 控制器
使用 TXD 和 RXD 相互通信。
一些系统可能 还具有可选的
外部组件, 包括分裂终端、
用于在 CAN 总线上 提供额外 ESD 或
瞬态保护的二极管、 共模总线稳定输出
或外部上拉电阻器, 以适应需要它们
以实现快速数据速率的 MCU。
14 引脚 CAN 收发器 与 8 引脚收发器
具有相同的 基本功能,但
增加了一些附加功能, 例如能够使用低功耗
模式来实现电池 供电的操作并向
系统的其余部分 发出信号,以根据
通过 CAN 总线 发出的唤醒
命令启动。
当接收器发生 显性超时时,故障
引脚发出错误信号。
请注意,14 引脚收发器
具有与 8 引脚器件 相同的引脚映射。
这使 8 引脚器件 能够随时轻松
替代应用中的 14 引脚器件。
这是 14 引脚 CAN 收发器的典型应用。
我们可以看到, 此处所示的 8 引脚
应用采用相同的 基本电路,但还
具有其他用于 使能、故障、唤醒、
电源电压和 禁止的接口。
在正常运行时, CAN 和 CAN FD
收发器消耗 一定量的电源
电流,这使驱动器 和接收器能够运行。
例如,SN65HVD23x 系列通常消耗
6 毫安的电源电流。
不过,与小型 收发器一样,
该器件系列具有通过引脚 八控制的待机和睡眠模式。
当器件被置于 待机模式时,
接收器保持活动状态, 并充当总线的从器件。
不过驱动器关闭。
在该仅侦听 状态下,
收发器对总线 完全是被动的。
在睡眠模式下, 驱动器和
接收器均关闭。
在该超低功耗 模式下,总线
引脚处于高阻抗状态, 而 TXD 和 RXD 引脚
默认处于逻辑高电平。
器件保持在 待机或睡眠模式,
直到处理器通过 引脚八停用该模式。
要查找更多 CAN 和 CAN FD 技术资源
以及搜索 CAN 和 CAN FD 产品,请访问 ti.com/CAN。
此外,务必观看我们其他 有关控制器局域网的
TI 高精度实验室视频。
谢谢观看。
手机看
扫码用手机观看
 视频简介
视频简介
2.2 TI 高精度实验室 - CAN/LIN/SBC:CAN物理层
所属课程:TI 高精度实验室 - CAN
发布时间:2020.01.13
视频集数:4
本节视频时长:00:09:54
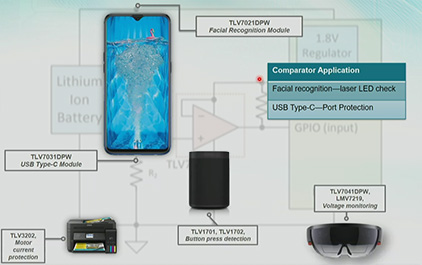
了解如何使用CAN / LIN收发器和多功能系统基础芯片(SBC)进行设计。 TI Precision Labs(TIPL)是模拟信号链设计人员最全面的在线教室。该 接口系列 提供了通过工业,汽车和多种应用领域常用协议的技术培训。 从CAN&LIN系列开始,了解CAN和LIN标准,包括它们的物理层电信号特性,帧结构和数据通信协议。


 未学习 2.1 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD概述
未学习 2.1 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD概述
 未学习 2.2 TI 高精度实验室 - CAN/LIN/SBC:CAN物理层
未学习 2.2 TI 高精度实验室 - CAN/LIN/SBC:CAN物理层
 未学习 2.3 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD协议
未学习 2.3 TI 高精度实验室 - CAN/LIN/SBC:CAN和CAN FD协议
 未学习 2.4 TI 高精度实验室 - CAN/LIN/SBC:什么是 LIN?
未学习 2.4 TI 高精度实验室 - CAN/LIN/SBC:什么是 LIN?




