熟练掌握高压MOSFET/IGBT栅极驱动设计
Loading the player...
将在30s后自动为您播放下一课程
大家好 我叫张巍 在 TI 担任系统工程师 今天我们来讨论一下熟练掌握 高压 MOSFET 和 IGBT 栅极驱动器设计 Mastering the Art and Fundamentals of High Voltage Gate Driver 我们在这堂培训课程当中会学到什么呢 我们会了解一下栅极驱动器的应用领域 什么是低压侧驱动 什么是高压侧和低压侧驱动 什么是隔离驱动以及如何优化驱动器设计 包括电路的集成参数 软开关和硬开关 高的 dv/dt 和 di/dt 以及隔离驱动 我们涉及到的一些芯片包含 UCC2751x 2752x UCC27x24 低压侧驱动 UCC2771x 是 600V 的高压侧和低压侧驱动 以及 UCC2152x UCC2122x 和 UCC53x 是隔离驱动 TI 的一些参考设计 包括 TIDA-01160 TIDA-01159 PMP20873 涉及到的一些应用的场合包括 UPS 通信 Server 还有 Solar motor drive 我们先来讨论一下栅极驱动器的应用领域 完了之后我们会从特别基础的了解 低压侧驱动 高压侧和低压侧驱动 以及隔离驱动 在了解了基本的常识之后 我们会深入探讨在系统的 电力电子系统当中如何设计优化栅极驱动器 最后我们会给出一些 TI 的一些设计参考 我们先来看栅极驱动器它的一些应用领域 它的应用领域非常广 包括锂电池充电 包括笔记本和手机的充电器 Server/Telecom/UPS 也包括 Electric Vehicles 还有 Class D 或者 Class E Audio 包括马达驱动 新能源 太阳能光伏 也包括 led 的驱动 Solid State Lighting 总之栅极驱动器它是应用于每一个 MOSFET IGBT 这些功率器件也包括最新的宽禁带器件 比如 GaN 氮化镓 SiC 和碳化硅器件 在 Server 和 Telecom 这个应用当中 我们这边给了一张图 输入的话是 85V 到 265V AC 经过 EMI Filter 到 PFC PFC 的输出基本上是 400V 的母线 然后 400V 到 48V 是 对这种带电池的 Teleccom 或者直接到 12V Server 这个里面我们给了一个电路的拓扑 包括原边的 PFC 和基于 LC 的 400V 到 48V 的系统 然后同步整流有桥式同步整流 也有这种全波整流 对 PFC 的话也有现在 我们宽禁带器件没有反向恢复 使得 Totem Pole PFC 在现在的 高效率高功率密度当中颇为广泛 粉色区域我们现在 high light 的都是 单个通道或者双通道的低压侧驱动 低压侧驱动就主要是指 它都是基于一个参考地 然后我们也有高压侧和低压侧驱动 就比如这种全桥电路上管和下管 100V 200V 是针对 48V 的母线 600V 是针对 400V 的母线 我们也有 Isolated gate driver 就是在所有的系统当中 不管是低压侧驱动还是高压侧和低压侧驱动 隔离驱动它作为现在越来越广泛的驱动形式 在任何的驱动场合当中都能够找得到 另外一个场合的话 我们这边给出的就是 Electric Vehicles 像电动汽车 新能源和马达驱动 我们下面给的这个拓扑的话就是 一个双向的太阳能汽车充电和电网连接 400V 的母线到输出是一个宽范围 200 到 400V 或者用于给汽车电池充电 或者是给太阳能板子把电量能够送回到电网 400V 也可以用于一些家电 白色家电设备 变频空调 变频电冰箱 还有一些其它的马达驱动和手动工具 这个也可以是 48V 的电池 也可以是 20V 的电池 当然其它一些马达驱动 包括 traction motor drive 就是汽车的牵引马达设计 还有像内部的 internal belt driven generator 它都是基于三相三个半桥 三相六个 switch 六个管子 来组成的马达驱动电路 对于每一个 MOSFET 来讲 在 100V 场合 200V 场合 或者 600V 场合或者是隔离驱动 都能够找到它应用的领域 我们都有哪些功率元器件 需要栅极驱动去驱动呢 我们这边给了几个例子 第一个就是 Si-MOSFET 就是基于我们 基于硅的传统的 MOSFET 它的电压一般在 20V 到 650V 还有 IGBT 一般 IGBT 都是 650V 场合以上 针对的功率设计都在三千瓦以上甚至更高 还有碳化硅的 MOSFET 它是电压范围基本在 650V 以上 而且还有 Nom-ON 和 Nom-OFF 的 宽禁带氮化镓器件 这些的话基本上是在 650V 或者是 100V 场合 每一个器件的驱动的电压范围不一样 像硅就是 12V 左右 IGBT 是 15V 碳化硅的话对不同的厂家不一样 有些是 15V 有些是 20V 氮化镓的话 有一些是 Si-MOS cascode 结构 它是 10V 去驱动 然后有一些是 Nom-OFF enhancement mode 它是 5V 驱动 关断的话 根据这个噪音的场合不一样 噪音大的会用负电压去关断 比如 IGBT 它会到 -8V SiC 到 -5V 然后 GaN 的话 -3V 它的一些电流电压曲线 就 I-V curve 我们也可以看到 针对 SiC 来讲 10V 就是够用了 IGBT 的话是超过12V 是好的 SiC-MOSFET 的话它的范围比较宽 一般 20V 的是一个比较优化的性能 氮化镓器件的话它的最大电压是 6V 但是 5V 或者 5.5V 就能够比较好的开通 氮化镓器件使得它的 RDS(ON) 通态电阻达到一个比较理想的水平 针对比较早的传统的栅极驱动电路 一般都是采用离散的元器件 它的输入的话是 控制器出来 3.3V 或者 5V 的信号 通过这个 Level Shift 电平转移 move up 就是把它电平能够转移到高一点去驱动 PNP NPN 的 Totem Pole 然后通过它的放大输出 再接到 MOS 管的栅极驱动 它输入是 3.3V 或者 5V 输出是 12V 它有电压和电流的放大 但是我们可以看到 在一个单路栅极驱动 它这个里面包括超过数十个器件 然后我们现大在家通常都采用的 是一个集成的单路 MOS 管栅极驱动 它可以去降低这个 BoM component 器件的总数量 可以减小 PCB 的这个面积 而且它也有带有一些其它的一些保护功能 比如说它有欠压保护 比如说它有输入的最小脉宽要求 当然把很多元器件集成之后 也可以增加它的一些可靠性能 哪一些低压侧的驱动是我们应该去选的呢 第一个我们要看的就是你是单路还是双路 比如说 你是一个单向的 PFC 那你一个单路就够了 如果是一个两相 interleave PFC 你可能会选一个 UCC2752x 它是一个双路 然后 UCC2751x 它分为两个输入 你可以是正向输入 你也可以是反向输入 就看你的逻辑是正还是反 而且双路驱动里面它也有反向驱动 2751x 系列它也包含 输出的上拉和下拉是两个分开的 pin 这样的话你就可以去调整 开通的速度和关断的速度 使得实现系统完整的性能更加优化 这个半桥驱动它是怎么工作的呢 半桥驱动里面的下管 其实就是一个低压侧驱动 你输入的话是一个控制器 输出的话是 MOS 管的话就是 12V 10V 如果说是低压的 MOS 可能会到 5V 那高压侧的呢 高压侧的话 因为这个输出的 ground 地的这个参考 它是这个 switch node 我们这个点叫 HS 这个 HS 的话 HS 它是根据开关管的开通或者关断 它是在零和母线电压来回跳动 那在这个跳动的电压过程当中 你就要实现信号的 Level Shift 或者是隔离 比如说你原边的信号是基于这个信号的地 但是你的输出是 HS 你怎么能够把这个信号 从低压侧传输到高压侧呢 这个在半导体的集成工艺当中 它就有电路叫 Level Shift 它通过低压去控制高压的管子 把信号传输到高压侧 在信号的隔离之外 而且你得需要提供电源 因为在开通的时候你必须保证 有 10V 的电压加在上管的这个栅极上面 我们可以看到在正常工作的时候 高压侧的输入信号它是针对于信号地的 但是高压侧的输出信号 它是在母线电压以上 就是如果说母线是 100V 那就是 100V 如果说母线是 700V 那就是基于 700V 的电压 那你的 HO 电压就是在这个 700V 之上 再加一个 10V 的驱动或者 5V 或者 12V 对于一些低压 100V 的场合 很多的驱动它都把这个自举的 这个二极管 DBoot 集成到这个芯片里面 你 100V 的二极管的性能 要比高压 700V 的二极管的性能会好很多 所以 100V 栅极驱动器 集成自举二极管的概率比较大 在高压 600V 到 700V 的场合 自举二极管一般都采用外加的 discrete 就是分散元器件 所以针对这种 100V 到 700V 的应用场合 TI 的话它是有 UCC27714是 600V UCC27201是 100V UCC27712 是 600V 它是一个 这些都是双通道 27800 所以它都是双通道上管和下管 除了我们刚才讲的这些基本的电路之外 在输入侧如果说它的 PCB 的 layout 距离比较长 会加一些 RC 的滤波 然后再输出侧的话 根据开通和关断 它可以加一个反并联二极管使它的关断更慢 加开通电阻使得它开通的 di/dt 引起的这种过冲 dv 还有它的 overshoot 电压的过冲会小一些 当我们选这个栅极驱动芯片的时候 有哪些参数需要注意呢 第一个就是静态参数 静态参数里面 它基于这种供电电压和它的欠压保护 这个是我们第一个要看的 比如说氮化镓器件它就是 7V 到 14V 7V 是这个是 100V 的上下管驱动 然后5114是低压侧驱动 20V 到 25V 是 UCC2771x 或者是 UCC27201x 针对这种 MOS 管和 IGBT 的驱动 35V 的话一般都是 GaN 的 MOSFET 因为它的工作电压是 0 到 20V 如果加负压的话是 -5V 到的 20V 那就是 25V 它需要一些其它的余额 35V 是一个比较合理的供电最高电压 另外一个的话就是它的驱动电流 驱动电流直接是和你的 驱动的这功率管的大小 电流的大小 比如说 你是 10 安培的 MOSFET 或者是 100 安培的 MOSFET 它的栅极的电容 需要的这个驱动电流能力是不一样 对这种驱动电流的话 一般有对称的和不对称 如果对称的话 就是说你的开通上拉电流 和关断下拉电流它是一样的 比如说都是 4 安 27714 或者是27201是3安 它也有这种不对称 就是你开通的时候要比关断的时候小一些 这个是主要是针对于开通的时候 它是由反向恢复电流引起的 这种过冲或者是下拉 来减缓它开通引起的这种噪音 然后关断的话对 MOS 管来讲 它的输出电容是一个自然的一个 Snubber 所以它关断的时候 你越大的电流产生的这个问题 就不包括反向恢复 所以它关断的时候大的电流可以使得 它的关断的 lose 损耗减小 第三个就是输入的逻辑电平类型 第一种就是 TTL 和 CMOS Compatible 就是你是 TTL 电平 CMOS 电平都是兼用 这种的话一般都是用于输入数字控制器 它的输出的话是 3.3V 那在这种场合 一般都会选择 TTL 或者 CMOS Compatible 但如果说这个输入是另外一种类型 是 CMOS 的话 它一般开通电压是供电电压的百分之五十五 就是说你如果要满足完整开通 一般输入电平的设计需要 高于电源的百分之七十 就是 0.7 倍的 VDD 还有一个就是高压侧和低压侧驱动 它的 Boot 电压 自举的电压 那如果是 100V 那你就需要选择 比如说 UCC272xx系列 它的 Boot 电压是100 加上它的上管驱动电压 就是 100V 再加 20V 还有600V 的电压再加 20V 620V 另外一种类型就是动态参数 动态参数就是第一个就是传输延时 第二个就是上升时间和关断时间 就是这个是反映了驱动器驱动电流的大小 还有传输延迟的这种匹配 比如说你上管和下管在同时开通的时候 这两个的一致性如何 还有就是输入的最小带宽 如果说你 1 纳秒的噪音 都能够让你的输出打开的话 这可能对电力电子噪音比较多的系统里面 它不是推荐的 比如说 如果说出现 5 纳秒的噪音 我希望这个栅极驱动器能够把它屏蔽掉 最后一类重要的要考虑的就是它的封装 封装的话对功率密度要求比较高的 比如说 WSON-6 2x2 的封装 也有 3x3 的 SOT-23 还有普通的这种 SOIC 的封装 或者是 SO-PwrPad 或者 TSSOP TI 是提供 这些封装都在我们的这个产品的 这个系列里面都有 客户可以根据你自己对自己的场合 到底是贴片的 还是直插的 还是有立的 还是说没有 pin 脚的 可以根据这些要求来选择合理的封装 除了我们刚才讨论的一些基本参数之外 另外一个要求就是 你这个栅极驱动器需不需要隔离 在一个电子电子系统当中 如果说是和电网连接 电网连接就有雷击 为了能够保证人员的安全 它在功率部分都需要设计隔离 就是比如说 400V 到 12V 它这一级有一级隔离 那这一级隔离的话 它不但能够起到 比如说电压通过变比把高压变到低压的作用 而且能够防止在电网侧出现雷击 然后在 load 负载这一侧 人们不受到雷击这种高压的这种危害 在功率电路之外 另外一个就是你在控制电路也需要隔离 否则这个电路就不是隔离 下面这个里面来讲 就是说你的输出侧 在副边有反馈 原边需要驱动 然后这个在整个的控制电路当中也要做隔离 那控制电路当中做隔离 你可以通过光耦做反馈 然后通过驱动高压侧和低压侧来做驱动 你也可以通过隔离变压器 把信号传输到原边 你也可以通过隔离的栅极驱动器 来驱动原边的 MOS 管 对于这种不同的要求 比如说你的输入电压不一样 对于这种基本隔离和加强隔离的隔离等级 在 IEC 的标准 UL 和 BDE 的标准当中 都有详细的描述 所以客户可以根据这种终端系统里面 系统的设计要求 选择隔离等级到底是 基本隔离还是加强隔离 要实现隔离驱动 我们这个里面先讲两种 我们现在常用的第一个就是 通过隔离变压器 就是我们这边说的 TYPE A 那隔离变压器它从 controller 控制器 拿到信号之后先必须经过一级放大 把它的电压和电流都能够放大 放大之后它到变压器的原边 然后副边经过两路信号送到我们的半桥 另外 TYPE B 就是我们可以先用 数字隔离器把信号从原边传到副边 然后再通过高压侧和低压侧 或者是用上侧驱动用自举电路 来实现高压侧和低压侧的半桥驱动 这两种办法各有优缺点 基于这种隔离变压器的栅极驱动设计 它的优点就是它的传输延时比较小 所以单纯靠看这个低压侧驱动 再加上变压器驱动 如果说考虑这个其它的电阻电容的话 它一般在 20 纳秒左右 而且它不需要高压侧的这个电源去设计 因为变压器它不但能够传输信号 而且能够传输 power 就是传输它的瞬间需要的开通电流 然后对这两点来讲的话 这个 TYPE B 的话 它的传输延时 因为它需要高压侧和低压侧的 Level Shift 所以 Level Shift 它防止噪音 它就需要加一些 需要一定的时间来去甄别 所以它的驱动的延时相对来说会大一些 而且它是需要这种副边的供电 就比如说你这个数字隔离器的副边 它是需要这种 比如说你 12V 加个 LDO 再给它供电 这个和原边的电路是不共地的电源 但是如果说我们把这个整个电路 如果考虑齐全 为了保证信号的完整性 隔离驱动器它不是像我们刚才那样的 实际的电路当中 它会加一些其它的离散元器件 二极管 稳压管 电阻 三极管 来使得它的开通和关断 能够达到比较理想的状态 那这样一比的话 我们就会看到它的 TYPE A 的一些劣势 就比如说原副边这种耦合电容 通过变压器要耦合的非常好的时候 它这个原副边的这种耦合电容 一般都会超过 10pF 它的这些寄生参数 因为是变压器寄生电感 再加上很多离散元器件它的寄生参数 还有带来的一些过冲 还有它整个的一些尺寸 这些体积 都是这个隔离驱动变压器的一些缺点 那在这方面的话 TYPE B 基于这种数字隔离器 和上下管隔离器相匹配的系统 它就体现出了优势 原副边电容小于 1pF 寄生参数小 体积小 整个 PCB layout 做的也比较容易 然后它的尺寸也比较小 如果说我们单纯把这个需要的这些元器件 主要的元器件列下来 比如说我们在 TYPE A 和 TYPE B 作一个对比的话 我们就可以看到 TYPE A 如果要实现加强隔离 它的这个变压器体积非常的大 然后 TYPE B 的话 它都是就是一个数字隔离器 再加一个原副边的上管和下管的栅极驱动器 相对这两个的 PCB 的面积 它是减小了将近一半 然后体积减小的非常多 然后另外一种类型 就是把这个数字隔离器和上管和下管的隔离 它做成一个芯片 这个芯片的话 我们就叫做隔离栅极驱动器 它的这个 CMTI 的要求一般会性能就比较好 超过 100 伏每纳秒 它可以做到 5kV 的加强隔离 传输延时从原来的一百纳秒 降低到十九二十纳秒左右 然后它的这个通道的一致性 它的信号的畸变都是小于 5 个纳秒 而且这个办法它的 PCB 的面积是 又是 TYPE B 的一半 所以我们整个来看从 TYPE A 到 TYPE B 到 TYPE C 它的 PCB 面积减小超过了百分之七十 所以我们可以看到 A B C 在整个栅极驱动器里面的优点和缺点 UCC21520 隔离栅极驱动 就是我们 TI 2016年 刚好上市的一个双路隔离驱动 它的这个瞬态共模抑制参数是 100 伏每纳秒 minimum 就是最小值 然后它是 TI 我们第一款设计的隔离驱动 它也有些简单的保护功能 包括死区设置 欠压 还有它一些比较好的动态性能 它可以被用作两路低压侧同步整流驱动 也可以是一个半桥驱动 也可以作为两个高压侧驱动 所以它的设计是非常的方便 栅极驱动器设计它有输入 输出跟随输入实现相应的逻辑 对电压和电流进行放大 这个看似是一个非常简单的一个应用设计 但是它真的就那么简单吗 然后我们在下面这个我们培训过程当中 我们会详细介绍在驱动器设计 考虑寄生参数 考虑软开关硬开关 考虑大电流的驱动 针对 MOS 管的非线性电容 考虑这个 CMTI dv/dt 还有它的寄生的电感和电容 怎么能够实现原边和副边 信号地和功率地的分离 然后如何设计它的 power supply 进行一些详细的分析 所以我们下面是深入的去介绍 在整个的栅极驱动设计过程当中 我们怎么去优化 怎么去增强它的可靠性 怎么去减小它的损耗 首先我们去看一看在整个驱动电路当中 它有哪些寄生参数呢 首先就是这个我们要看的 MOS 管 以 MOS 管为例 它有它的寄生电容 输入电容是它的栅极??? CGS 加上 Miller cape CGD 它的 reverse cape 是CGD 它的输出电容是 CGD 再加上 CDS 在驱动芯片当中它内部有 wire bond 然后 PCB 这个是绿颜色的 它也会引起这种寄生电感 然后开通和关断的过程当中 它不是一个一阶系统 它是一个比较复杂的二阶 甚至更高阶的系统 它会有产生振荡 另外一个寄生参数就是 MOS 管的体二极管 这个二极管是 MOSFET 寄生二极管 这个二极管的特性是很难被优化 或者是你优化的这个二极管 其它的性能就得损失 所以这个二极管它不是 一个单独设计出来的二极管 它是一个 MOS 管的寄生体二极管 它作为一个寄生参数 在系统的应用当中也有很多考量 我们来看开通的这个过程 开通的过程的话就是 你先栅极超过开关点 电流增加 然后在 Miller 区间之内电压减小 完了之后电压再升高减小它 RDS(ON) 它的一些简化电路我们在 从 t0 刻到 t2 时刻 t2 到 t3 t3 到 t4 我们可以看到整个驱动器 它是针对哪一部分电流进行工作 从 t1 到 t3 是电流和电压它相互交叠的部分 它的积分就是乘积就是它的 power 它的损耗的 power 然后它的积分乘以它的频率就是它的损耗 然后我们可以看到你这个 t1 到 t3 的时间越长 你的损耗就越大 那怎么能够减小t1到t3这个时刻的时间段呢 那就是我们比较直观的办法 就是在栅极驱动的它的输出的电流 上拉电流能够把它增大 电流越大 t1 到 t2 时刻时间就越短 你的损耗就越小 关断可以作为开通的一个镜像 我们这边就不重复解释了 如果说考虑上管和下管 考虑这种体二极管或者是反向并联二极管 它的这个开通特性又有哪些不一样呢 首先我们可以看一看 左上角画的二极管的反向恢复 二极管的反向恢复这个是 我们教科书上给到的波形 它的正相电流在关断的时候 首先电流下降 有反过冲 然后再承受它的电压 VF 那把这个电压叠加到我们上一页讲的 这个开通的过程当中就可以看到 它在上管开通的时候 它有一个 overshoot 电流的一个过冲 那这个过冲就是反向恢复引起的 下管的反向恢复二极管引起的 然后这个里面就是我们作了个比较合理的假设 就是输出电感的电流是不变的 那我们可以看到体二极管 或者是反并联二极管引起的反向恢复 使得它的开通的损耗增大 对于这种超级结 SuperJunction MOSFET 它的这个二极管是一个体二极管 寄生二极管 对于 IGBT 它的二极管是一个反并联的二极管 那这个反并联的二极管是经过优化设计的 是一个快恢复二极管 那在整个的这个实验波形当中我们可以看到 对十安培开通 MOS 管它的反向恢复电流 可以冲到六七十安 超过五倍的负载电流 那 IGBT 的开通电流比如说是二十安 那它的反向恢复电流在这个时刻 它的峰值电流就只有十安 加上它的负载二十安 它就冲到三十安 所以我们可以看到 IGBT 它优化过的体二极管性能是要比 SuperJunction MOS 管的体二极管 寄生二极管的性能要好很多 针对这种反向恢复电流大的 di/dt 所引起的这种过冲 它就会反应到这个输入 Gate 就是栅极驱动上面 可以引起很大的振荡 这个振荡我们是要尝试去避免 它不但会引起这种电路的损耗 而且会使得它的过冲或者是下拉 会伤及到这个 MOS 管栅极驱动器的 这个可靠性 它会超过它的 spike 会引起内部的一些电路的损害 甚至使得输出的逻辑产生错误 然后考虑到这个寄生参数 一个比较可调的办法就是增加它的开通电阻 我们这边给了一张图 那就是通过增加它的驱动电阻 从 2 欧姆到 20 欧姆 可以看到它的 MOS 管的反向恢复电流 它的峰值电流它是有下降的 比如说 你在负载电流是 4 安的时候 它是从 50 安能够降到 40 安 还有百分之二十的优化 但是它的优化是有限度的 所以就是因为它的体的 寄生二极管性能是非常的差 所以考虑寄生二极管 加上它的这个寄生电感寄生电容 所产生的噪声 产生的这种噪音对系统是 必须要认真 合理的去考虑 如果说开通的电阻比较大 可以加反并联二极管 也可以选取那种上拉下拉是分开的栅极驱动器 那这样的话就可以节省一个 分散 离散的元器件二极管 考虑到刚才我们的硬开关和一些寄生参数 所带来的噪音 那另外一部分我们通过可以避免的就是软开关 软开关的话就是使得它的二极管不要导通电流 然后使得它的这 个switch node 电压能够降到 0 比如说 Totem pole PFC 它这个里面的作临界电流模式 transition mode 那通过电流一点点的过零 可以使得 switch node 电压从母线电压降到 0 然后再开通 然后另外一部分电流 现在比较流行的就是 LLC 软开关电路 它的电路是通过 Magnetic inductance 就是激磁电感在死区期间 对半桥的上管和下管的电容 进行充放电来实现软开关 在软开关的电路当中和硬开关的电路当中 栅极驱动器有哪些不一样呢 我们左边是我们讲的软开关的 左边是我们讲的硬开关的电路 右边的话就是软开关 那软开关就是你在开通之前 它的 Drain to Source 的电压已经降到了 0 它的体二极管已经打开 那这个时候你可以看得到 它的这个输入栅极驱动信号 它就没有米勒平台 它就直接是一个从 0 到高的一个过程 这个过程的话就是相当于是 它的输入电容 CGD 加 CGS 两个并联 从0一直驱动到它的最终的电源 VDD 电压 它的工作状态是从原来的两个状态 然后变成现在的一个状态 然后我们可以看到电压和电流 它是没有交叠 没有损耗 而且这个里面负载这个电流 就是 ID 这个电流 这个电流增加是由系统的电感来产生的 而不是它由它的负载电流 或者寄生参数来产生了一个非常大的 di/dt 所以它的 di/dt Current Slope 电流这个斜率 它是由电感来决定 那我们就知道电感电流它不会瞬间发生变化 它的 di/dt 就小了非常多 因此它还会优化系统的噪声 那我们来看一看 在软开关的电路当中 它是怎么样的一个驱动损耗呢 那我们左上角这张图是给出了 硬开关电路栅极驱动 再加上这个横坐标是它的栅极的电荷 这个是硬开关的波形 那如果是软开关驱动到 10V 那考虑到之前我们讨论过的 你开通和关断它的整个的这个损耗的计算 就是你的电压乘上你的驱动电荷 QG 所以它是这个方形的面积 长方形的面积 它是硬开关的 ON 加上硬开关的 OFF 如果是软开关的话 因为我们可以考虑它没有米勒平台 它就是输入电容 CGD 加上 CGS 两个并联 这个它的斜率就是跟随第三段线的斜率 它在 10V 以内 它开通的面积和 10V 硬开关关断的面积 它这两个加起来是软开关电路里面的损耗 我们可以看到这个软开关的损耗 QG_ZVS 它是要比硬开关的损耗是要小的 就是在软开关的电路当中 它不但没有二极管 寄生二极管引起的这个损耗 和硬开关的电压和电流的交叠 它也会减小栅极驱动器所需要的能量 那在讨论的这个软开关开通关断的过程当中 你选取一个比如说一百毫安的驱动器 和1安培或者是5安培的栅极驱动器 它在关断的过程当中有什么不一样呢 我们左边是一个选取的是相对来说 电流比较小的一个驱动器 然后如果说你选择一个大电流的驱动器 它的这个开关损耗是怎么样的一个过程呢 如果说在普通的半桥 然后中间 switch node 加电感 在大电流驱动器关断的时候 这个它的电压电流的变化 它不是 不由你原边的这个 像我们左边的这个曲线它有米勒平台 电压变化和电流变化 因为你的大的驱动电流 会使得你的漏极电流非常快的下降 如果说你能够考虑到你的寄生参数 比如说你在 0V 的时候 这个 MOS 管的 Coss 是6纳法 然后你在 400V 的时候它是小于30皮法 这个相当于差了两百倍 那这个非线性特性在实际的大电流驱动下 它的波形我们这边给出了一个简易的波形 我们就可以看得出它在电流非常大的时候 从负载电流慢慢下降的时候 就是这一段它的电压上来的是非常慢 因为在低压的时候它的电容非常大 它的电容非常大 那它产生的这个斜率就比较小 当它电流下降快 电流电压慢慢上升的时候 它这个电容就会变小 它的斜率就会增加 这个时候它的电流下降也快了起来 所以在大电流驱动考虑非线性电容 它的关断损耗实际上是非常小 而且这个关断的这个电压的变化 它不是你的 Gate 的电流来控制的 而是由你的负载电流 在低压的时候 Coss 它还是一个 就像一个自然的一个 Snubber 它能够让你的 dv/dt 变化非常快 那在高压的时候的你的电容非常小 你的电压变化非常快 所以你的损耗会变小 但是这个大的这个 dv/dt 就使得你的系统里面会产生一些 Cdv/dt 还有 Ldi/dt 所引起的振荡 然后我们这一页给出了 大电流关断下面电压和电流的波形 所以我们这边看到的那个粉色线是它的 开通关断电压就是驱动电压 然后中间的绿色的波形是它的开关的电流 然后蓝色的是它的 Drain to Source 的电压 如果说把这个关断的过程能够放大 你可以看得出来 它的这个电压初始上升是非常慢的 然后当它的电压上升到一定程度的时候 它的电压才 dv/dt 才会变化 这个时候我们可以看到 它其实是一个 5 伏每纳秒 就是我们从左边的 100 伏每纳秒 Zoom IN 就是放大到 5 伏每一个 我们可以看到这个时候 电流在下降的过程当中 电力电压在很快的上升 有趣的是我们可以观察一下 这个 Gate 都已经完全降到了 0 了 但是电流还没有降到 0 那这个电流是我们实际测到的这个开关的电流 这个电流从外部去测量去看 它是一个就是 MOS 管的内部的通道的电流 和它寄生电容电流的和 那我们这个和 这两个加起来之和是我们现在看到这个绿色的 那绿色的在 Gate 栅极电压降到零之后 这个电流在这一瞬间 它是没有像我们课本上看到的这个 这种它的电流是马上降下来 那这部分电流我们怎么去理解呢 这个是一个把一个开关的电流分解成 它的电容电流 输出电容 Coss 电流再加上通道电流 那这个的话我们可以看成是 一个 LLC 电路关断电路 那再把它分成四个阶段 第一 第二 第三和第四 第一个阶段的话 它是一个电流通过通道续流的阶段 相当于是这个电流是通过这个电感 通过电容 然后通过 S1 的 Drain 流到 S1 的 Source 当你这个 S1 关掉之后 那比如说第二阶段 它是从它的 plat node 降到了它的 switchnode 那这一部分过程当中 它的通道的电流肯定是降到零了 从 IM 降到 0 那由于这个栅极驱动它特别的强 那 Miller 到这个 switchnode 的区间 就会变的非常的短 这一部分就是你的负载电流减去通道电流 就变到了 Coss 的电流 Coss 电流就是我们看到的这个 ID_Coss 那 Coss 电流的话因为这个时候 它的负载电流是不变的 这部分 Coss 电流 它没有引起足够高的 Drain to Source 的变化 这个是蓝色的曲线在下面 因为在低压的时候 输出电容它的电容非常大 是纳法级的 所以这个时候你从 0 到 IM 再增加这个很快的过程当中 漏极到源极的电压基本上增加的非常的小 那当第二个阶段结束之后到第三个阶段 你的整个通道电流已经关断了 然后你的激磁电感的电流 再给 Coss1 和Coss2 放电和充电 那这部分电流就第三个阶段这部分电流 就相当于是这两个电容电压是已经升高到一部分 那这两个电容都会是并联 然后充放电结束这个关断的过程 第四个阶段就是你 S1 充电超过母线电压 使得 S2 的体二极管导通 在第二阶段这部分因为时间非常的短 因为你栅极驱动非常的强 它从 Coss 上的电流从 0 到 Im 增加 使得这个 Vds_s1 电压增长的非常慢 电压非常低的时候 它电容是非常大的 所以在这个阶段是 Coss1 是起主导作用 所以在这段时间之内你的负载电流 我们就可以认为它全部流向了 Coss1 这部分电压和电流交叠是实际的关断损耗 其它的这种交叠 比如说第三阶段的电压和这个 Coss 的交叠 这部分能量存储到这个 Coss 上面了 这部分能量的话 在下一个软开关的时候能够被释放到负载 它这部分能量是不算 所以实际的关断的损耗是要非常小 这部分能量是被 Recovered 到开通 但是我们由于这个非线性电容 它在电压上升的过程当中 它的电容变小它的 dv/dt 就会变高 那 dv/dt 和 di/dt 在高的时候 会引起电路的振荡 在高的 dV/dt 的情况下面 它在电路里面会对系统产生哪样的影响呢 这个是一个把栅极上管和下管 驱动器内部电路画出来 包括它的一些外围电路 当你的 switchnode 看到 这个 dv/dt 的过程当中 高的 dv/dt 的过程当中 它会通过一些寄生的电容 这个寄生的电容包括 这个 Level Shift 原副边的电容 包括这个自举二极管的结电容 通过原边的电路一直耦合到 你的系统的功率地 那这部分的噪音就会产生大的噪声 就像下面这个波形 它的蓝色的显示它的输入 它的紫色的显示它的输出 你可以看到输出 在有些脉冲是没有输出的 输出的就会出现丢波 这个就是因为你原边的噪音 大到一定程度的时候 会产生了使得这个驱动器它不正常工作 看到这个 dv/dt 我们也可以看看 这个 MOS 管和氮化镓器件 dv/dt 的一些差别 那我们可以看到 dv/dt 氮化镓的宽禁带器件 是 MOS 管的超过三倍以上 然后它的这个 di/dt 是 SJ-MOSFET 的超过十倍 所以随着宽禁带器件不断的发展 对驱动器的 dv/dt 的要求越来越高 对整个电路系统的设计也要求比以前更严格 那怎么去设计这个上管和下管隔离 上管和下管驱动器它的能够 使它能够抗 dv/dt 能力更高呢 那我们这个里面就做出了一些解释 就说在 27714 当中我们在低压侧 有这个原边和副边的 Level Shift 这样的话我们原副边就会产生两个地 一个信号地 一个是功率地 通过这个驱动器内部 Level Shift 电路 把这两个分开 那这两个分开之后 我们在把二极管左侧加一个蓝色 这个蓝色的线 大电容 使得它开关噪音在这个小的 loop 里面 能够通过 PCB 的 layout 让它形成一个很小的 loop 回到功率地 然后在原边和副边整个的 这个自举的充电的过程当中加一些电容和电阻 我们就可以看到就是 这一部分 dv/dt 所产生的噪声 它被限制在功率地 使得它信号地相对就比较干净 噪声小使得这个问题解决掉 所以 27714 在处理 dv/dt 的过程当中 也是做了专门的内部电路设计 那讨论完了 dv/dt 然后另外一部分就是这个 di/dt 我们知道这个 di/dt 的变化如果过快的话 它从这个 switchnode 到地 在开关管关断的时候 开关管关断的 上管关断的时候电流下降 然后下管的电流在上升 这部分的话就是因为负载电流 在这个时候就是 assume 假设它是不变的 因为开关的瞬间时间是非常短 在几百纳秒 电感的电流在这个时候是变化是非常微小的 那我们可以看到当这个电流 它在往上增加的时候 电感引起的反向电压 就使得 switch node 的电压低于这个地的电压 电压低到一定程度之后就会产生 Driver malfunction 为了针对这个功能 那 UCC27714它的这个负向瞬态安全工作区 就做了合理的优化 比如在200纳秒的时候它可以承受-30V 如果是100纳秒它可以承受-70V 的电压 所以使得栅极上管和下管驱动器 更加的抗干扰能力增强 然后 TIDA-01159 这个是一个 TI 给的参考设计 它是针对我们刚开始讲的 UCC21520和 SN6505 设计的一个小的单元模块 包括电源 包括隔离驱动器形成的一个驱动半桥的 EVM 所以详细的信息可以在 TI.com 搜索 TIDA-01159 获取详细的信息 这边我们给出一个总结 所以我们这个里面讲到了 Gate Driver 栅极驱动器的应用 讲了一些基本的一些参数的了解 讨论到低压侧高压侧和低压侧 还有包括隔离驱动 除此之外我们深入的讨论了寄生参数 软开关 硬开关 非线性电容 以及 dv/dt di/dt 所产生的噪声 和怎么通过 PCB 的解决 和选取合理的 Gate driver 去避免这些问题 作了深入的探讨 详细的信息也在 TIDA 当中 给出了一些案例 那非常感谢大家花时间来参加这个培训 如果有什么问题请及时的做出反馈 谢谢大家
大家好 我叫张巍 在 TI 担任系统工程师 今天我们来讨论一下熟练掌握 高压 MOSFET 和 IGBT 栅极驱动器设计 Mastering the Art and Fundamentals of High Voltage Gate Driver 我们在这堂培训课程当中会学到什么呢 我们会了解一下栅极驱动器的应用领域 什么是低压侧驱动 什么是高压侧和低压侧驱动 什么是隔离驱动以及如何优化驱动器设计 包括电路的集成参数 软开关和硬开关 高的 dv/dt 和 di/dt 以及隔离驱动 我们涉及到的一些芯片包含 UCC2751x 2752x UCC27x24 低压侧驱动 UCC2771x 是 600V 的高压侧和低压侧驱动 以及 UCC2152x UCC2122x 和 UCC53x 是隔离驱动 TI 的一些参考设计 包括 TIDA-01160 TIDA-01159 PMP20873 涉及到的一些应用的场合包括 UPS 通信 Server 还有 Solar motor drive 我们先来讨论一下栅极驱动器的应用领域 完了之后我们会从特别基础的了解 低压侧驱动 高压侧和低压侧驱动 以及隔离驱动 在了解了基本的常识之后 我们会深入探讨在系统的 电力电子系统当中如何设计优化栅极驱动器 最后我们会给出一些 TI 的一些设计参考 我们先来看栅极驱动器它的一些应用领域 它的应用领域非常广 包括锂电池充电 包括笔记本和手机的充电器 Server/Telecom/UPS 也包括 Electric Vehicles 还有 Class D 或者 Class E Audio 包括马达驱动 新能源 太阳能光伏 也包括 led 的驱动 Solid State Lighting 总之栅极驱动器它是应用于每一个 MOSFET IGBT 这些功率器件也包括最新的宽禁带器件 比如 GaN 氮化镓 SiC 和碳化硅器件 在 Server 和 Telecom 这个应用当中 我们这边给了一张图 输入的话是 85V 到 265V AC 经过 EMI Filter 到 PFC PFC 的输出基本上是 400V 的母线 然后 400V 到 48V 是 对这种带电池的 Teleccom 或者直接到 12V Server 这个里面我们给了一个电路的拓扑 包括原边的 PFC 和基于 LC 的 400V 到 48V 的系统 然后同步整流有桥式同步整流 也有这种全波整流 对 PFC 的话也有现在 我们宽禁带器件没有反向恢复 使得 Totem Pole PFC 在现在的 高效率高功率密度当中颇为广泛 粉色区域我们现在 high light 的都是 单个通道或者双通道的低压侧驱动 低压侧驱动就主要是指 它都是基于一个参考地 然后我们也有高压侧和低压侧驱动 就比如这种全桥电路上管和下管 100V 200V 是针对 48V 的母线 600V 是针对 400V 的母线 我们也有 Isolated gate driver 就是在所有的系统当中 不管是低压侧驱动还是高压侧和低压侧驱动 隔离驱动它作为现在越来越广泛的驱动形式 在任何的驱动场合当中都能够找得到 另外一个场合的话 我们这边给出的就是 Electric Vehicles 像电动汽车 新能源和马达驱动 我们下面给的这个拓扑的话就是 一个双向的太阳能汽车充电和电网连接 400V 的母线到输出是一个宽范围 200 到 400V 或者用于给汽车电池充电 或者是给太阳能板子把电量能够送回到电网 400V 也可以用于一些家电 白色家电设备 变频空调 变频电冰箱 还有一些其它的马达驱动和手动工具 这个也可以是 48V 的电池 也可以是 20V 的电池 当然其它一些马达驱动 包括 traction motor drive 就是汽车的牵引马达设计 还有像内部的 internal belt driven generator 它都是基于三相三个半桥 三相六个 switch 六个管子 来组成的马达驱动电路 对于每一个 MOSFET 来讲 在 100V 场合 200V 场合 或者 600V 场合或者是隔离驱动 都能够找到它应用的领域 我们都有哪些功率元器件 需要栅极驱动去驱动呢 我们这边给了几个例子 第一个就是 Si-MOSFET 就是基于我们 基于硅的传统的 MOSFET 它的电压一般在 20V 到 650V 还有 IGBT 一般 IGBT 都是 650V 场合以上 针对的功率设计都在三千瓦以上甚至更高 还有碳化硅的 MOSFET 它是电压范围基本在 650V 以上 而且还有 Nom-ON 和 Nom-OFF 的 宽禁带氮化镓器件 这些的话基本上是在 650V 或者是 100V 场合 每一个器件的驱动的电压范围不一样 像硅就是 12V 左右 IGBT 是 15V 碳化硅的话对不同的厂家不一样 有些是 15V 有些是 20V 氮化镓的话 有一些是 Si-MOS cascode 结构 它是 10V 去驱动 然后有一些是 Nom-OFF enhancement mode 它是 5V 驱动 关断的话 根据这个噪音的场合不一样 噪音大的会用负电压去关断 比如 IGBT 它会到 -8V SiC 到 -5V 然后 GaN 的话 -3V 它的一些电流电压曲线 就 I-V curve 我们也可以看到 针对 SiC 来讲 10V 就是够用了 IGBT 的话是超过12V 是好的 SiC-MOSFET 的话它的范围比较宽 一般 20V 的是一个比较优化的性能 氮化镓器件的话它的最大电压是 6V 但是 5V 或者 5.5V 就能够比较好的开通 氮化镓器件使得它的 RDS(ON) 通态电阻达到一个比较理想的水平 针对比较早的传统的栅极驱动电路 一般都是采用离散的元器件 它的输入的话是 控制器出来 3.3V 或者 5V 的信号 通过这个 Level Shift 电平转移 move up 就是把它电平能够转移到高一点去驱动 PNP NPN 的 Totem Pole 然后通过它的放大输出 再接到 MOS 管的栅极驱动 它输入是 3.3V 或者 5V 输出是 12V 它有电压和电流的放大 但是我们可以看到 在一个单路栅极驱动 它这个里面包括超过数十个器件 然后我们现大在家通常都采用的 是一个集成的单路 MOS 管栅极驱动 它可以去降低这个 BoM component 器件的总数量 可以减小 PCB 的这个面积 而且它也有带有一些其它的一些保护功能 比如说它有欠压保护 比如说它有输入的最小脉宽要求 当然把很多元器件集成之后 也可以增加它的一些可靠性能 哪一些低压侧的驱动是我们应该去选的呢 第一个我们要看的就是你是单路还是双路 比如说 你是一个单向的 PFC 那你一个单路就够了 如果是一个两相 interleave PFC 你可能会选一个 UCC2752x 它是一个双路 然后 UCC2751x 它分为两个输入 你可以是正向输入 你也可以是反向输入 就看你的逻辑是正还是反 而且双路驱动里面它也有反向驱动 2751x 系列它也包含 输出的上拉和下拉是两个分开的 pin 这样的话你就可以去调整 开通的速度和关断的速度 使得实现系统完整的性能更加优化 这个半桥驱动它是怎么工作的呢 半桥驱动里面的下管 其实就是一个低压侧驱动 你输入的话是一个控制器 输出的话是 MOS 管的话就是 12V 10V 如果说是低压的 MOS 可能会到 5V 那高压侧的呢 高压侧的话 因为这个输出的 ground 地的这个参考 它是这个 switch node 我们这个点叫 HS 这个 HS 的话 HS 它是根据开关管的开通或者关断 它是在零和母线电压来回跳动 那在这个跳动的电压过程当中 你就要实现信号的 Level Shift 或者是隔离 比如说你原边的信号是基于这个信号的地 但是你的输出是 HS 你怎么能够把这个信号 从低压侧传输到高压侧呢 这个在半导体的集成工艺当中 它就有电路叫 Level Shift 它通过低压去控制高压的管子 把信号传输到高压侧 在信号的隔离之外 而且你得需要提供电源 因为在开通的时候你必须保证 有 10V 的电压加在上管的这个栅极上面 我们可以看到在正常工作的时候 高压侧的输入信号它是针对于信号地的 但是高压侧的输出信号 它是在母线电压以上 就是如果说母线是 100V 那就是 100V 如果说母线是 700V 那就是基于 700V 的电压 那你的 HO 电压就是在这个 700V 之上 再加一个 10V 的驱动或者 5V 或者 12V 对于一些低压 100V 的场合 很多的驱动它都把这个自举的 这个二极管 DBoot 集成到这个芯片里面 你 100V 的二极管的性能 要比高压 700V 的二极管的性能会好很多 所以 100V 栅极驱动器 集成自举二极管的概率比较大 在高压 600V 到 700V 的场合 自举二极管一般都采用外加的 discrete 就是分散元器件 所以针对这种 100V 到 700V 的应用场合 TI 的话它是有 UCC27714是 600V UCC27201是 100V UCC27712 是 600V 它是一个 这些都是双通道 27800 所以它都是双通道上管和下管 除了我们刚才讲的这些基本的电路之外 在输入侧如果说它的 PCB 的 layout 距离比较长 会加一些 RC 的滤波 然后再输出侧的话 根据开通和关断 它可以加一个反并联二极管使它的关断更慢 加开通电阻使得它开通的 di/dt 引起的这种过冲 dv 还有它的 overshoot 电压的过冲会小一些 当我们选这个栅极驱动芯片的时候 有哪些参数需要注意呢 第一个就是静态参数 静态参数里面 它基于这种供电电压和它的欠压保护 这个是我们第一个要看的 比如说氮化镓器件它就是 7V 到 14V 7V 是这个是 100V 的上下管驱动 然后5114是低压侧驱动 20V 到 25V 是 UCC2771x 或者是 UCC27201x 针对这种 MOS 管和 IGBT 的驱动 35V 的话一般都是 GaN 的 MOSFET 因为它的工作电压是 0 到 20V 如果加负压的话是 -5V 到的 20V 那就是 25V 它需要一些其它的余额 35V 是一个比较合理的供电最高电压 另外一个的话就是它的驱动电流 驱动电流直接是和你的 驱动的这功率管的大小 电流的大小 比如说 你是 10 安培的 MOSFET 或者是 100 安培的 MOSFET 它的栅极的电容 需要的这个驱动电流能力是不一样 对这种驱动电流的话 一般有对称的和不对称 如果对称的话 就是说你的开通上拉电流 和关断下拉电流它是一样的 比如说都是 4 安 27714 或者是27201是3安 它也有这种不对称 就是你开通的时候要比关断的时候小一些 这个是主要是针对于开通的时候 它是由反向恢复电流引起的 这种过冲或者是下拉 来减缓它开通引起的这种噪音 然后关断的话对 MOS 管来讲 它的输出电容是一个自然的一个 Snubber 所以它关断的时候 你越大的电流产生的这个问题 就不包括反向恢复 所以它关断的时候大的电流可以使得 它的关断的 lose 损耗减小 第三个就是输入的逻辑电平类型 第一种就是 TTL 和 CMOS Compatible 就是你是 TTL 电平 CMOS 电平都是兼用 这种的话一般都是用于输入数字控制器 它的输出的话是 3.3V 那在这种场合 一般都会选择 TTL 或者 CMOS Compatible 但如果说这个输入是另外一种类型 是 CMOS 的话 它一般开通电压是供电电压的百分之五十五 就是说你如果要满足完整开通 一般输入电平的设计需要 高于电源的百分之七十 就是 0.7 倍的 VDD 还有一个就是高压侧和低压侧驱动 它的 Boot 电压 自举的电压 那如果是 100V 那你就需要选择 比如说 UCC272xx系列 它的 Boot 电压是100 加上它的上管驱动电压 就是 100V 再加 20V 还有600V 的电压再加 20V 620V 另外一种类型就是动态参数 动态参数就是第一个就是传输延时 第二个就是上升时间和关断时间 就是这个是反映了驱动器驱动电流的大小 还有传输延迟的这种匹配 比如说你上管和下管在同时开通的时候 这两个的一致性如何 还有就是输入的最小带宽 如果说你 1 纳秒的噪音 都能够让你的输出打开的话 这可能对电力电子噪音比较多的系统里面 它不是推荐的 比如说 如果说出现 5 纳秒的噪音 我希望这个栅极驱动器能够把它屏蔽掉 最后一类重要的要考虑的就是它的封装 封装的话对功率密度要求比较高的 比如说 WSON-6 2x2 的封装 也有 3x3 的 SOT-23 还有普通的这种 SOIC 的封装 或者是 SO-PwrPad 或者 TSSOP TI 是提供 这些封装都在我们的这个产品的 这个系列里面都有 客户可以根据你自己对自己的场合 到底是贴片的 还是直插的 还是有立的 还是说没有 pin 脚的 可以根据这些要求来选择合理的封装 除了我们刚才讨论的一些基本参数之外 另外一个要求就是 你这个栅极驱动器需不需要隔离 在一个电子电子系统当中 如果说是和电网连接 电网连接就有雷击 为了能够保证人员的安全 它在功率部分都需要设计隔离 就是比如说 400V 到 12V 它这一级有一级隔离 那这一级隔离的话 它不但能够起到 比如说电压通过变比把高压变到低压的作用 而且能够防止在电网侧出现雷击 然后在 load 负载这一侧 人们不受到雷击这种高压的这种危害 在功率电路之外 另外一个就是你在控制电路也需要隔离 否则这个电路就不是隔离 下面这个里面来讲 就是说你的输出侧 在副边有反馈 原边需要驱动 然后这个在整个的控制电路当中也要做隔离 那控制电路当中做隔离 你可以通过光耦做反馈 然后通过驱动高压侧和低压侧来做驱动 你也可以通过隔离变压器 把信号传输到原边 你也可以通过隔离的栅极驱动器 来驱动原边的 MOS 管 对于这种不同的要求 比如说你的输入电压不一样 对于这种基本隔离和加强隔离的隔离等级 在 IEC 的标准 UL 和 BDE 的标准当中 都有详细的描述 所以客户可以根据这种终端系统里面 系统的设计要求 选择隔离等级到底是 基本隔离还是加强隔离 要实现隔离驱动 我们这个里面先讲两种 我们现在常用的第一个就是 通过隔离变压器 就是我们这边说的 TYPE A 那隔离变压器它从 controller 控制器 拿到信号之后先必须经过一级放大 把它的电压和电流都能够放大 放大之后它到变压器的原边 然后副边经过两路信号送到我们的半桥 另外 TYPE B 就是我们可以先用 数字隔离器把信号从原边传到副边 然后再通过高压侧和低压侧 或者是用上侧驱动用自举电路 来实现高压侧和低压侧的半桥驱动 这两种办法各有优缺点 基于这种隔离变压器的栅极驱动设计 它的优点就是它的传输延时比较小 所以单纯靠看这个低压侧驱动 再加上变压器驱动 如果说考虑这个其它的电阻电容的话 它一般在 20 纳秒左右 而且它不需要高压侧的这个电源去设计 因为变压器它不但能够传输信号 而且能够传输 power 就是传输它的瞬间需要的开通电流 然后对这两点来讲的话 这个 TYPE B 的话 它的传输延时 因为它需要高压侧和低压侧的 Level Shift 所以 Level Shift 它防止噪音 它就需要加一些 需要一定的时间来去甄别 所以它的驱动的延时相对来说会大一些 而且它是需要这种副边的供电 就比如说你这个数字隔离器的副边 它是需要这种 比如说你 12V 加个 LDO 再给它供电 这个和原边的电路是不共地的电源 但是如果说我们把这个整个电路 如果考虑齐全 为了保证信号的完整性 隔离驱动器它不是像我们刚才那样的 实际的电路当中 它会加一些其它的离散元器件 二极管 稳压管 电阻 三极管 来使得它的开通和关断 能够达到比较理想的状态 那这样一比的话 我们就会看到它的 TYPE A 的一些劣势 就比如说原副边这种耦合电容 通过变压器要耦合的非常好的时候 它这个原副边的这种耦合电容 一般都会超过 10pF 它的这些寄生参数 因为是变压器寄生电感 再加上很多离散元器件它的寄生参数 还有带来的一些过冲 还有它整个的一些尺寸 这些体积 都是这个隔离驱动变压器的一些缺点 那在这方面的话 TYPE B 基于这种数字隔离器 和上下管隔离器相匹配的系统 它就体现出了优势 原副边电容小于 1pF 寄生参数小 体积小 整个 PCB layout 做的也比较容易 然后它的尺寸也比较小 如果说我们单纯把这个需要的这些元器件 主要的元器件列下来 比如说我们在 TYPE A 和 TYPE B 作一个对比的话 我们就可以看到 TYPE A 如果要实现加强隔离 它的这个变压器体积非常的大 然后 TYPE B 的话 它都是就是一个数字隔离器 再加一个原副边的上管和下管的栅极驱动器 相对这两个的 PCB 的面积 它是减小了将近一半 然后体积减小的非常多 然后另外一种类型 就是把这个数字隔离器和上管和下管的隔离 它做成一个芯片 这个芯片的话 我们就叫做隔离栅极驱动器 它的这个 CMTI 的要求一般会性能就比较好 超过 100 伏每纳秒 它可以做到 5kV 的加强隔离 传输延时从原来的一百纳秒 降低到十九二十纳秒左右 然后它的这个通道的一致性 它的信号的畸变都是小于 5 个纳秒 而且这个办法它的 PCB 的面积是 又是 TYPE B 的一半 所以我们整个来看从 TYPE A 到 TYPE B 到 TYPE C 它的 PCB 面积减小超过了百分之七十 所以我们可以看到 A B C 在整个栅极驱动器里面的优点和缺点 UCC21520 隔离栅极驱动 就是我们 TI 2016年 刚好上市的一个双路隔离驱动 它的这个瞬态共模抑制参数是 100 伏每纳秒 minimum 就是最小值 然后它是 TI 我们第一款设计的隔离驱动 它也有些简单的保护功能 包括死区设置 欠压 还有它一些比较好的动态性能 它可以被用作两路低压侧同步整流驱动 也可以是一个半桥驱动 也可以作为两个高压侧驱动 所以它的设计是非常的方便 栅极驱动器设计它有输入 输出跟随输入实现相应的逻辑 对电压和电流进行放大 这个看似是一个非常简单的一个应用设计 但是它真的就那么简单吗 然后我们在下面这个我们培训过程当中 我们会详细介绍在驱动器设计 考虑寄生参数 考虑软开关硬开关 考虑大电流的驱动 针对 MOS 管的非线性电容 考虑这个 CMTI dv/dt 还有它的寄生的电感和电容 怎么能够实现原边和副边 信号地和功率地的分离 然后如何设计它的 power supply 进行一些详细的分析 所以我们下面是深入的去介绍 在整个的栅极驱动设计过程当中 我们怎么去优化 怎么去增强它的可靠性 怎么去减小它的损耗 首先我们去看一看在整个驱动电路当中 它有哪些寄生参数呢 首先就是这个我们要看的 MOS 管 以 MOS 管为例 它有它的寄生电容 输入电容是它的栅极??? CGS 加上 Miller cape CGD 它的 reverse cape 是CGD 它的输出电容是 CGD 再加上 CDS 在驱动芯片当中它内部有 wire bond 然后 PCB 这个是绿颜色的 它也会引起这种寄生电感 然后开通和关断的过程当中 它不是一个一阶系统 它是一个比较复杂的二阶 甚至更高阶的系统 它会有产生振荡 另外一个寄生参数就是 MOS 管的体二极管 这个二极管是 MOSFET 寄生二极管 这个二极管的特性是很难被优化 或者是你优化的这个二极管 其它的性能就得损失 所以这个二极管它不是 一个单独设计出来的二极管 它是一个 MOS 管的寄生体二极管 它作为一个寄生参数 在系统的应用当中也有很多考量 我们来看开通的这个过程 开通的过程的话就是 你先栅极超过开关点 电流增加 然后在 Miller 区间之内电压减小 完了之后电压再升高减小它 RDS(ON) 它的一些简化电路我们在 从 t0 刻到 t2 时刻 t2 到 t3 t3 到 t4 我们可以看到整个驱动器 它是针对哪一部分电流进行工作 从 t1 到 t3 是电流和电压它相互交叠的部分 它的积分就是乘积就是它的 power 它的损耗的 power 然后它的积分乘以它的频率就是它的损耗 然后我们可以看到你这个 t1 到 t3 的时间越长 你的损耗就越大 那怎么能够减小t1到t3这个时刻的时间段呢 那就是我们比较直观的办法 就是在栅极驱动的它的输出的电流 上拉电流能够把它增大 电流越大 t1 到 t2 时刻时间就越短 你的损耗就越小 关断可以作为开通的一个镜像 我们这边就不重复解释了 如果说考虑上管和下管 考虑这种体二极管或者是反向并联二极管 它的这个开通特性又有哪些不一样呢 首先我们可以看一看 左上角画的二极管的反向恢复 二极管的反向恢复这个是 我们教科书上给到的波形 它的正相电流在关断的时候 首先电流下降 有反过冲 然后再承受它的电压 VF 那把这个电压叠加到我们上一页讲的 这个开通的过程当中就可以看到 它在上管开通的时候 它有一个 overshoot 电流的一个过冲 那这个过冲就是反向恢复引起的 下管的反向恢复二极管引起的 然后这个里面就是我们作了个比较合理的假设 就是输出电感的电流是不变的 那我们可以看到体二极管 或者是反并联二极管引起的反向恢复 使得它的开通的损耗增大 对于这种超级结 SuperJunction MOSFET 它的这个二极管是一个体二极管 寄生二极管 对于 IGBT 它的二极管是一个反并联的二极管 那这个反并联的二极管是经过优化设计的 是一个快恢复二极管 那在整个的这个实验波形当中我们可以看到 对十安培开通 MOS 管它的反向恢复电流 可以冲到六七十安 超过五倍的负载电流 那 IGBT 的开通电流比如说是二十安 那它的反向恢复电流在这个时刻 它的峰值电流就只有十安 加上它的负载二十安 它就冲到三十安 所以我们可以看到 IGBT 它优化过的体二极管性能是要比 SuperJunction MOS 管的体二极管 寄生二极管的性能要好很多 针对这种反向恢复电流大的 di/dt 所引起的这种过冲 它就会反应到这个输入 Gate 就是栅极驱动上面 可以引起很大的振荡 这个振荡我们是要尝试去避免 它不但会引起这种电路的损耗 而且会使得它的过冲或者是下拉 会伤及到这个 MOS 管栅极驱动器的 这个可靠性 它会超过它的 spike 会引起内部的一些电路的损害 甚至使得输出的逻辑产生错误 然后考虑到这个寄生参数 一个比较可调的办法就是增加它的开通电阻 我们这边给了一张图 那就是通过增加它的驱动电阻 从 2 欧姆到 20 欧姆 可以看到它的 MOS 管的反向恢复电流 它的峰值电流它是有下降的 比如说 你在负载电流是 4 安的时候 它是从 50 安能够降到 40 安 还有百分之二十的优化 但是它的优化是有限度的 所以就是因为它的体的 寄生二极管性能是非常的差 所以考虑寄生二极管 加上它的这个寄生电感寄生电容 所产生的噪声 产生的这种噪音对系统是 必须要认真 合理的去考虑 如果说开通的电阻比较大 可以加反并联二极管 也可以选取那种上拉下拉是分开的栅极驱动器 那这样的话就可以节省一个 分散 离散的元器件二极管 考虑到刚才我们的硬开关和一些寄生参数 所带来的噪音 那另外一部分我们通过可以避免的就是软开关 软开关的话就是使得它的二极管不要导通电流 然后使得它的这 个switch node 电压能够降到 0 比如说 Totem pole PFC 它这个里面的作临界电流模式 transition mode 那通过电流一点点的过零 可以使得 switch node 电压从母线电压降到 0 然后再开通 然后另外一部分电流 现在比较流行的就是 LLC 软开关电路 它的电路是通过 Magnetic inductance 就是激磁电感在死区期间 对半桥的上管和下管的电容 进行充放电来实现软开关 在软开关的电路当中和硬开关的电路当中 栅极驱动器有哪些不一样呢 我们左边是我们讲的软开关的 左边是我们讲的硬开关的电路 右边的话就是软开关 那软开关就是你在开通之前 它的 Drain to Source 的电压已经降到了 0 它的体二极管已经打开 那这个时候你可以看得到 它的这个输入栅极驱动信号 它就没有米勒平台 它就直接是一个从 0 到高的一个过程 这个过程的话就是相当于是 它的输入电容 CGD 加 CGS 两个并联 从0一直驱动到它的最终的电源 VDD 电压 它的工作状态是从原来的两个状态 然后变成现在的一个状态 然后我们可以看到电压和电流 它是没有交叠 没有损耗 而且这个里面负载这个电流 就是 ID 这个电流 这个电流增加是由系统的电感来产生的 而不是它由它的负载电流 或者寄生参数来产生了一个非常大的 di/dt 所以它的 di/dt Current Slope 电流这个斜率 它是由电感来决定 那我们就知道电感电流它不会瞬间发生变化 它的 di/dt 就小了非常多 因此它还会优化系统的噪声 那我们来看一看 在软开关的电路当中 它是怎么样的一个驱动损耗呢 那我们左上角这张图是给出了 硬开关电路栅极驱动 再加上这个横坐标是它的栅极的电荷 这个是硬开关的波形 那如果是软开关驱动到 10V 那考虑到之前我们讨论过的 你开通和关断它的整个的这个损耗的计算 就是你的电压乘上你的驱动电荷 QG 所以它是这个方形的面积 长方形的面积 它是硬开关的 ON 加上硬开关的 OFF 如果是软开关的话 因为我们可以考虑它没有米勒平台 它就是输入电容 CGD 加上 CGS 两个并联 这个它的斜率就是跟随第三段线的斜率 它在 10V 以内 它开通的面积和 10V 硬开关关断的面积 它这两个加起来是软开关电路里面的损耗 我们可以看到这个软开关的损耗 QG_ZVS 它是要比硬开关的损耗是要小的 就是在软开关的电路当中 它不但没有二极管 寄生二极管引起的这个损耗 和硬开关的电压和电流的交叠 它也会减小栅极驱动器所需要的能量 那在讨论的这个软开关开通关断的过程当中 你选取一个比如说一百毫安的驱动器 和1安培或者是5安培的栅极驱动器 它在关断的过程当中有什么不一样呢 我们左边是一个选取的是相对来说 电流比较小的一个驱动器 然后如果说你选择一个大电流的驱动器 它的这个开关损耗是怎么样的一个过程呢 如果说在普通的半桥 然后中间 switch node 加电感 在大电流驱动器关断的时候 这个它的电压电流的变化 它不是 不由你原边的这个 像我们左边的这个曲线它有米勒平台 电压变化和电流变化 因为你的大的驱动电流 会使得你的漏极电流非常快的下降 如果说你能够考虑到你的寄生参数 比如说你在 0V 的时候 这个 MOS 管的 Coss 是6纳法 然后你在 400V 的时候它是小于30皮法 这个相当于差了两百倍 那这个非线性特性在实际的大电流驱动下 它的波形我们这边给出了一个简易的波形 我们就可以看得出它在电流非常大的时候 从负载电流慢慢下降的时候 就是这一段它的电压上来的是非常慢 因为在低压的时候它的电容非常大 它的电容非常大 那它产生的这个斜率就比较小 当它电流下降快 电流电压慢慢上升的时候 它这个电容就会变小 它的斜率就会增加 这个时候它的电流下降也快了起来 所以在大电流驱动考虑非线性电容 它的关断损耗实际上是非常小 而且这个关断的这个电压的变化 它不是你的 Gate 的电流来控制的 而是由你的负载电流 在低压的时候 Coss 它还是一个 就像一个自然的一个 Snubber 它能够让你的 dv/dt 变化非常快 那在高压的时候的你的电容非常小 你的电压变化非常快 所以你的损耗会变小 但是这个大的这个 dv/dt 就使得你的系统里面会产生一些 Cdv/dt 还有 Ldi/dt 所引起的振荡 然后我们这一页给出了 大电流关断下面电压和电流的波形 所以我们这边看到的那个粉色线是它的 开通关断电压就是驱动电压 然后中间的绿色的波形是它的开关的电流 然后蓝色的是它的 Drain to Source 的电压 如果说把这个关断的过程能够放大 你可以看得出来 它的这个电压初始上升是非常慢的 然后当它的电压上升到一定程度的时候 它的电压才 dv/dt 才会变化 这个时候我们可以看到 它其实是一个 5 伏每纳秒 就是我们从左边的 100 伏每纳秒 Zoom IN 就是放大到 5 伏每一个 我们可以看到这个时候 电流在下降的过程当中 电力电压在很快的上升 有趣的是我们可以观察一下 这个 Gate 都已经完全降到了 0 了 但是电流还没有降到 0 那这个电流是我们实际测到的这个开关的电流 这个电流从外部去测量去看 它是一个就是 MOS 管的内部的通道的电流 和它寄生电容电流的和 那我们这个和 这两个加起来之和是我们现在看到这个绿色的 那绿色的在 Gate 栅极电压降到零之后 这个电流在这一瞬间 它是没有像我们课本上看到的这个 这种它的电流是马上降下来 那这部分电流我们怎么去理解呢 这个是一个把一个开关的电流分解成 它的电容电流 输出电容 Coss 电流再加上通道电流 那这个的话我们可以看成是 一个 LLC 电路关断电路 那再把它分成四个阶段 第一 第二 第三和第四 第一个阶段的话 它是一个电流通过通道续流的阶段 相当于是这个电流是通过这个电感 通过电容 然后通过 S1 的 Drain 流到 S1 的 Source 当你这个 S1 关掉之后 那比如说第二阶段 它是从它的 plat node 降到了它的 switchnode 那这一部分过程当中 它的通道的电流肯定是降到零了 从 IM 降到 0 那由于这个栅极驱动它特别的强 那 Miller 到这个 switchnode 的区间 就会变的非常的短 这一部分就是你的负载电流减去通道电流 就变到了 Coss 的电流 Coss 电流就是我们看到的这个 ID_Coss 那 Coss 电流的话因为这个时候 它的负载电流是不变的 这部分 Coss 电流 它没有引起足够高的 Drain to Source 的变化 这个是蓝色的曲线在下面 因为在低压的时候 输出电容它的电容非常大 是纳法级的 所以这个时候你从 0 到 IM 再增加这个很快的过程当中 漏极到源极的电压基本上增加的非常的小 那当第二个阶段结束之后到第三个阶段 你的整个通道电流已经关断了 然后你的激磁电感的电流 再给 Coss1 和Coss2 放电和充电 那这部分电流就第三个阶段这部分电流 就相当于是这两个电容电压是已经升高到一部分 那这两个电容都会是并联 然后充放电结束这个关断的过程 第四个阶段就是你 S1 充电超过母线电压 使得 S2 的体二极管导通 在第二阶段这部分因为时间非常的短 因为你栅极驱动非常的强 它从 Coss 上的电流从 0 到 Im 增加 使得这个 Vds_s1 电压增长的非常慢 电压非常低的时候 它电容是非常大的 所以在这个阶段是 Coss1 是起主导作用 所以在这段时间之内你的负载电流 我们就可以认为它全部流向了 Coss1 这部分电压和电流交叠是实际的关断损耗 其它的这种交叠 比如说第三阶段的电压和这个 Coss 的交叠 这部分能量存储到这个 Coss 上面了 这部分能量的话 在下一个软开关的时候能够被释放到负载 它这部分能量是不算 所以实际的关断的损耗是要非常小 这部分能量是被 Recovered 到开通 但是我们由于这个非线性电容 它在电压上升的过程当中 它的电容变小它的 dv/dt 就会变高 那 dv/dt 和 di/dt 在高的时候 会引起电路的振荡 在高的 dV/dt 的情况下面 它在电路里面会对系统产生哪样的影响呢 这个是一个把栅极上管和下管 驱动器内部电路画出来 包括它的一些外围电路 当你的 switchnode 看到 这个 dv/dt 的过程当中 高的 dv/dt 的过程当中 它会通过一些寄生的电容 这个寄生的电容包括 这个 Level Shift 原副边的电容 包括这个自举二极管的结电容 通过原边的电路一直耦合到 你的系统的功率地 那这部分的噪音就会产生大的噪声 就像下面这个波形 它的蓝色的显示它的输入 它的紫色的显示它的输出 你可以看到输出 在有些脉冲是没有输出的 输出的就会出现丢波 这个就是因为你原边的噪音 大到一定程度的时候 会产生了使得这个驱动器它不正常工作 看到这个 dv/dt 我们也可以看看 这个 MOS 管和氮化镓器件 dv/dt 的一些差别 那我们可以看到 dv/dt 氮化镓的宽禁带器件 是 MOS 管的超过三倍以上 然后它的这个 di/dt 是 SJ-MOSFET 的超过十倍 所以随着宽禁带器件不断的发展 对驱动器的 dv/dt 的要求越来越高 对整个电路系统的设计也要求比以前更严格 那怎么去设计这个上管和下管隔离 上管和下管驱动器它的能够 使它能够抗 dv/dt 能力更高呢 那我们这个里面就做出了一些解释 就说在 27714 当中我们在低压侧 有这个原边和副边的 Level Shift 这样的话我们原副边就会产生两个地 一个信号地 一个是功率地 通过这个驱动器内部 Level Shift 电路 把这两个分开 那这两个分开之后 我们在把二极管左侧加一个蓝色 这个蓝色的线 大电容 使得它开关噪音在这个小的 loop 里面 能够通过 PCB 的 layout 让它形成一个很小的 loop 回到功率地 然后在原边和副边整个的 这个自举的充电的过程当中加一些电容和电阻 我们就可以看到就是 这一部分 dv/dt 所产生的噪声 它被限制在功率地 使得它信号地相对就比较干净 噪声小使得这个问题解决掉 所以 27714 在处理 dv/dt 的过程当中 也是做了专门的内部电路设计 那讨论完了 dv/dt 然后另外一部分就是这个 di/dt 我们知道这个 di/dt 的变化如果过快的话 它从这个 switchnode 到地 在开关管关断的时候 开关管关断的 上管关断的时候电流下降 然后下管的电流在上升 这部分的话就是因为负载电流 在这个时候就是 assume 假设它是不变的 因为开关的瞬间时间是非常短 在几百纳秒 电感的电流在这个时候是变化是非常微小的 那我们可以看到当这个电流 它在往上增加的时候 电感引起的反向电压 就使得 switch node 的电压低于这个地的电压 电压低到一定程度之后就会产生 Driver malfunction 为了针对这个功能 那 UCC27714它的这个负向瞬态安全工作区 就做了合理的优化 比如在200纳秒的时候它可以承受-30V 如果是100纳秒它可以承受-70V 的电压 所以使得栅极上管和下管驱动器 更加的抗干扰能力增强 然后 TIDA-01159 这个是一个 TI 给的参考设计 它是针对我们刚开始讲的 UCC21520和 SN6505 设计的一个小的单元模块 包括电源 包括隔离驱动器形成的一个驱动半桥的 EVM 所以详细的信息可以在 TI.com 搜索 TIDA-01159 获取详细的信息 这边我们给出一个总结 所以我们这个里面讲到了 Gate Driver 栅极驱动器的应用 讲了一些基本的一些参数的了解 讨论到低压侧高压侧和低压侧 还有包括隔离驱动 除此之外我们深入的讨论了寄生参数 软开关 硬开关 非线性电容 以及 dv/dt di/dt 所产生的噪声 和怎么通过 PCB 的解决 和选取合理的 Gate driver 去避免这些问题 作了深入的探讨 详细的信息也在 TIDA 当中 给出了一些案例 那非常感谢大家花时间来参加这个培训 如果有什么问题请及时的做出反馈 谢谢大家
大家好 我叫张巍
在 TI 担任系统工程师
今天我们来讨论一下熟练掌握
高压 MOSFET 和 IGBT 栅极驱动器设计
Mastering the Art and Fundamentals of
High Voltage Gate Driver
我们在这堂培训课程当中会学到什么呢
我们会了解一下栅极驱动器的应用领域
什么是低压侧驱动
什么是高压侧和低压侧驱动
什么是隔离驱动以及如何优化驱动器设计
包括电路的集成参数 软开关和硬开关
高的 dv/dt 和 di/dt
以及隔离驱动
我们涉及到的一些芯片包含
UCC2751x 2752x UCC27x24 低压侧驱动
UCC2771x 是 600V 的高压侧和低压侧驱动
以及 UCC2152x UCC2122x 和 UCC53x
是隔离驱动
TI 的一些参考设计
包括 TIDA-01160 TIDA-01159 PMP20873
涉及到的一些应用的场合包括
UPS 通信 Server 还有 Solar motor drive
我们先来讨论一下栅极驱动器的应用领域
完了之后我们会从特别基础的了解
低压侧驱动 高压侧和低压侧驱动
以及隔离驱动
在了解了基本的常识之后
我们会深入探讨在系统的
电力电子系统当中如何设计优化栅极驱动器
最后我们会给出一些 TI 的一些设计参考
我们先来看栅极驱动器它的一些应用领域
它的应用领域非常广
包括锂电池充电
包括笔记本和手机的充电器
Server/Telecom/UPS
也包括 Electric Vehicles 还有 Class D 或者 Class E Audio
包括马达驱动 新能源 太阳能光伏
也包括 led 的驱动
Solid State Lighting
总之栅极驱动器它是应用于每一个
MOSFET IGBT
这些功率器件也包括最新的宽禁带器件
比如 GaN 氮化镓
SiC 和碳化硅器件
在 Server 和 Telecom 这个应用当中
我们这边给了一张图
输入的话是 85V 到 265V AC
经过 EMI Filter 到 PFC
PFC 的输出基本上是 400V 的母线
然后 400V 到 48V 是
对这种带电池的 Teleccom
或者直接到 12V Server
这个里面我们给了一个电路的拓扑
包括原边的 PFC 和基于 LC 的
400V 到 48V 的系统
然后同步整流有桥式同步整流
也有这种全波整流
对 PFC 的话也有现在
我们宽禁带器件没有反向恢复
使得 Totem Pole PFC 在现在的
高效率高功率密度当中颇为广泛
粉色区域我们现在 high light 的都是
单个通道或者双通道的低压侧驱动
低压侧驱动就主要是指
它都是基于一个参考地
然后我们也有高压侧和低压侧驱动
就比如这种全桥电路上管和下管
100V 200V 是针对 48V 的母线
600V 是针对 400V 的母线
我们也有 Isolated gate driver
就是在所有的系统当中
不管是低压侧驱动还是高压侧和低压侧驱动
隔离驱动它作为现在越来越广泛的驱动形式
在任何的驱动场合当中都能够找得到
另外一个场合的话
我们这边给出的就是 Electric Vehicles
像电动汽车 新能源和马达驱动
我们下面给的这个拓扑的话就是
一个双向的太阳能汽车充电和电网连接
400V 的母线到输出是一个宽范围 200 到 400V
或者用于给汽车电池充电
或者是给太阳能板子把电量能够送回到电网
400V 也可以用于一些家电
白色家电设备 变频空调 变频电冰箱
还有一些其它的马达驱动和手动工具
这个也可以是 48V 的电池
也可以是 20V 的电池
当然其它一些马达驱动
包括 traction motor drive
就是汽车的牵引马达设计
还有像内部的 internal belt driven generator
它都是基于三相三个半桥
三相六个 switch 六个管子
来组成的马达驱动电路
对于每一个 MOSFET 来讲
在 100V 场合 200V 场合
或者 600V 场合或者是隔离驱动
都能够找到它应用的领域
我们都有哪些功率元器件
需要栅极驱动去驱动呢
我们这边给了几个例子
第一个就是 Si-MOSFET 就是基于我们
基于硅的传统的 MOSFET
它的电压一般在 20V 到 650V
还有 IGBT
一般 IGBT 都是 650V 场合以上
针对的功率设计都在三千瓦以上甚至更高
还有碳化硅的 MOSFET
它是电压范围基本在 650V 以上
而且还有 Nom-ON 和 Nom-OFF 的
宽禁带氮化镓器件
这些的话基本上是在 650V
或者是 100V 场合
每一个器件的驱动的电压范围不一样
像硅就是 12V 左右
IGBT 是 15V
碳化硅的话对不同的厂家不一样
有些是 15V
有些是 20V
氮化镓的话
有一些是 Si-MOS cascode 结构
它是 10V 去驱动
然后有一些是 Nom-OFF enhancement mode
它是 5V 驱动
关断的话
根据这个噪音的场合不一样
噪音大的会用负电压去关断
比如 IGBT 它会到 -8V
SiC 到 -5V
然后 GaN 的话 -3V
它的一些电流电压曲线
就 I-V curve 我们也可以看到
针对 SiC 来讲 10V 就是够用了
IGBT 的话是超过12V 是好的
SiC-MOSFET 的话它的范围比较宽
一般 20V 的是一个比较优化的性能
氮化镓器件的话它的最大电压是 6V
但是 5V 或者 5.5V 就能够比较好的开通
氮化镓器件使得它的 RDS(ON)
通态电阻达到一个比较理想的水平
针对比较早的传统的栅极驱动电路
一般都是采用离散的元器件
它的输入的话是
控制器出来 3.3V 或者 5V 的信号
通过这个 Level Shift 电平转移 move up
就是把它电平能够转移到高一点去驱动
PNP NPN 的 Totem Pole
然后通过它的放大输出
再接到 MOS 管的栅极驱动
它输入是 3.3V 或者 5V 输出是 12V
它有电压和电流的放大
但是我们可以看到
在一个单路栅极驱动
它这个里面包括超过数十个器件
然后我们现大在家通常都采用的
是一个集成的单路 MOS 管栅极驱动
它可以去降低这个
BoM component 器件的总数量
可以减小 PCB 的这个面积
而且它也有带有一些其它的一些保护功能
比如说它有欠压保护
比如说它有输入的最小脉宽要求
当然把很多元器件集成之后
也可以增加它的一些可靠性能
哪一些低压侧的驱动是我们应该去选的呢
第一个我们要看的就是你是单路还是双路
比如说 你是一个单向的 PFC
那你一个单路就够了
如果是一个两相 interleave PFC
你可能会选一个 UCC2752x
它是一个双路
然后 UCC2751x
它分为两个输入
你可以是正向输入
你也可以是反向输入
就看你的逻辑是正还是反
而且双路驱动里面它也有反向驱动
2751x 系列它也包含
输出的上拉和下拉是两个分开的 pin
这样的话你就可以去调整
开通的速度和关断的速度
使得实现系统完整的性能更加优化
这个半桥驱动它是怎么工作的呢
半桥驱动里面的下管
其实就是一个低压侧驱动
你输入的话是一个控制器
输出的话是 MOS 管的话就是 12V 10V
如果说是低压的 MOS 可能会到 5V
那高压侧的呢
高压侧的话
因为这个输出的 ground 地的这个参考
它是这个 switch node
我们这个点叫 HS
这个 HS 的话
HS 它是根据开关管的开通或者关断
它是在零和母线电压来回跳动
那在这个跳动的电压过程当中
你就要实现信号的 Level Shift
或者是隔离
比如说你原边的信号是基于这个信号的地
但是你的输出是 HS
你怎么能够把这个信号
从低压侧传输到高压侧呢
这个在半导体的集成工艺当中
它就有电路叫 Level Shift
它通过低压去控制高压的管子
把信号传输到高压侧
在信号的隔离之外
而且你得需要提供电源
因为在开通的时候你必须保证
有 10V 的电压加在上管的这个栅极上面
我们可以看到在正常工作的时候
高压侧的输入信号它是针对于信号地的
但是高压侧的输出信号
它是在母线电压以上
就是如果说母线是 100V 那就是 100V
如果说母线是 700V
那就是基于 700V 的电压
那你的 HO 电压就是在这个 700V 之上
再加一个 10V 的驱动或者 5V 或者 12V
对于一些低压 100V 的场合
很多的驱动它都把这个自举的
这个二极管 DBoot
集成到这个芯片里面
你 100V 的二极管的性能
要比高压 700V 的二极管的性能会好很多
所以 100V 栅极驱动器
集成自举二极管的概率比较大
在高压 600V 到 700V 的场合
自举二极管一般都采用外加的 discrete
就是分散元器件
所以针对这种 100V 到 700V 的应用场合
TI 的话它是有 UCC27714是 600V
UCC27201是 100V
UCC27712 是 600V 它是一个
这些都是双通道 27800
所以它都是双通道上管和下管
除了我们刚才讲的这些基本的电路之外
在输入侧如果说它的 PCB 的 layout 距离比较长
会加一些 RC 的滤波
然后再输出侧的话
根据开通和关断
它可以加一个反并联二极管使它的关断更慢
加开通电阻使得它开通的 di/dt
引起的这种过冲 dv
还有它的 overshoot
电压的过冲会小一些
当我们选这个栅极驱动芯片的时候
有哪些参数需要注意呢
第一个就是静态参数
静态参数里面
它基于这种供电电压和它的欠压保护
这个是我们第一个要看的
比如说氮化镓器件它就是 7V 到 14V
7V 是这个是 100V 的上下管驱动
然后5114是低压侧驱动
20V 到 25V 是 UCC2771x
或者是 UCC27201x
针对这种 MOS 管和 IGBT 的驱动
35V 的话一般都是 GaN 的 MOSFET
因为它的工作电压是 0 到 20V
如果加负压的话是 -5V 到的 20V
那就是 25V
它需要一些其它的余额
35V 是一个比较合理的供电最高电压
另外一个的话就是它的驱动电流
驱动电流直接是和你的
驱动的这功率管的大小
电流的大小
比如说
你是 10 安培的 MOSFET
或者是 100 安培的 MOSFET
它的栅极的电容
需要的这个驱动电流能力是不一样
对这种驱动电流的话
一般有对称的和不对称
如果对称的话
就是说你的开通上拉电流
和关断下拉电流它是一样的
比如说都是 4 安 27714
或者是27201是3安
它也有这种不对称
就是你开通的时候要比关断的时候小一些
这个是主要是针对于开通的时候
它是由反向恢复电流引起的
这种过冲或者是下拉
来减缓它开通引起的这种噪音
然后关断的话对 MOS 管来讲
它的输出电容是一个自然的一个 Snubber
所以它关断的时候
你越大的电流产生的这个问题
就不包括反向恢复
所以它关断的时候大的电流可以使得
它的关断的 lose 损耗减小
第三个就是输入的逻辑电平类型
第一种就是 TTL 和 CMOS Compatible
就是你是 TTL 电平 CMOS 电平都是兼用
这种的话一般都是用于输入数字控制器
它的输出的话是 3.3V
那在这种场合
一般都会选择 TTL 或者 CMOS Compatible
但如果说这个输入是另外一种类型
是 CMOS 的话
它一般开通电压是供电电压的百分之五十五
就是说你如果要满足完整开通
一般输入电平的设计需要
高于电源的百分之七十
就是 0.7 倍的 VDD
还有一个就是高压侧和低压侧驱动
它的 Boot 电压 自举的电压
那如果是 100V 那你就需要选择
比如说 UCC272xx系列
它的 Boot 电压是100
加上它的上管驱动电压
就是 100V 再加 20V
还有600V 的电压再加 20V 620V
另外一种类型就是动态参数
动态参数就是第一个就是传输延时
第二个就是上升时间和关断时间
就是这个是反映了驱动器驱动电流的大小
还有传输延迟的这种匹配
比如说你上管和下管在同时开通的时候
这两个的一致性如何
还有就是输入的最小带宽
如果说你 1 纳秒的噪音
都能够让你的输出打开的话
这可能对电力电子噪音比较多的系统里面
它不是推荐的
比如说 如果说出现 5 纳秒的噪音
我希望这个栅极驱动器能够把它屏蔽掉
最后一类重要的要考虑的就是它的封装
封装的话对功率密度要求比较高的
比如说 WSON-6 2x2 的封装
也有 3x3 的 SOT-23
还有普通的这种 SOIC 的封装
或者是 SO-PwrPad
或者 TSSOP
TI 是提供
这些封装都在我们的这个产品的
这个系列里面都有
客户可以根据你自己对自己的场合
到底是贴片的
还是直插的
还是有立的
还是说没有 pin 脚的
可以根据这些要求来选择合理的封装
除了我们刚才讨论的一些基本参数之外
另外一个要求就是
你这个栅极驱动器需不需要隔离
在一个电子电子系统当中
如果说是和电网连接
电网连接就有雷击
为了能够保证人员的安全
它在功率部分都需要设计隔离
就是比如说 400V 到 12V
它这一级有一级隔离
那这一级隔离的话
它不但能够起到
比如说电压通过变比把高压变到低压的作用
而且能够防止在电网侧出现雷击
然后在 load 负载这一侧
人们不受到雷击这种高压的这种危害
在功率电路之外
另外一个就是你在控制电路也需要隔离
否则这个电路就不是隔离
下面这个里面来讲
就是说你的输出侧
在副边有反馈 原边需要驱动
然后这个在整个的控制电路当中也要做隔离
那控制电路当中做隔离
你可以通过光耦做反馈
然后通过驱动高压侧和低压侧来做驱动
你也可以通过隔离变压器
把信号传输到原边
你也可以通过隔离的栅极驱动器
来驱动原边的 MOS 管
对于这种不同的要求
比如说你的输入电压不一样
对于这种基本隔离和加强隔离的隔离等级
在 IEC 的标准 UL 和 BDE 的标准当中
都有详细的描述
所以客户可以根据这种终端系统里面
系统的设计要求
选择隔离等级到底是
基本隔离还是加强隔离
要实现隔离驱动
我们这个里面先讲两种
我们现在常用的第一个就是
通过隔离变压器
就是我们这边说的 TYPE A
那隔离变压器它从 controller 控制器
拿到信号之后先必须经过一级放大
把它的电压和电流都能够放大
放大之后它到变压器的原边
然后副边经过两路信号送到我们的半桥
另外 TYPE B 就是我们可以先用
数字隔离器把信号从原边传到副边
然后再通过高压侧和低压侧
或者是用上侧驱动用自举电路
来实现高压侧和低压侧的半桥驱动
这两种办法各有优缺点
基于这种隔离变压器的栅极驱动设计
它的优点就是它的传输延时比较小
所以单纯靠看这个低压侧驱动
再加上变压器驱动
如果说考虑这个其它的电阻电容的话
它一般在 20 纳秒左右
而且它不需要高压侧的这个电源去设计
因为变压器它不但能够传输信号
而且能够传输 power
就是传输它的瞬间需要的开通电流
然后对这两点来讲的话
这个 TYPE B 的话
它的传输延时
因为它需要高压侧和低压侧的 Level Shift
所以 Level Shift 它防止噪音
它就需要加一些
需要一定的时间来去甄别
所以它的驱动的延时相对来说会大一些
而且它是需要这种副边的供电
就比如说你这个数字隔离器的副边
它是需要这种
比如说你 12V 加个 LDO 再给它供电
这个和原边的电路是不共地的电源
但是如果说我们把这个整个电路
如果考虑齐全
为了保证信号的完整性
隔离驱动器它不是像我们刚才那样的
实际的电路当中
它会加一些其它的离散元器件
二极管 稳压管 电阻 三极管
来使得它的开通和关断
能够达到比较理想的状态
那这样一比的话
我们就会看到它的 TYPE A 的一些劣势
就比如说原副边这种耦合电容
通过变压器要耦合的非常好的时候
它这个原副边的这种耦合电容
一般都会超过 10pF
它的这些寄生参数
因为是变压器寄生电感
再加上很多离散元器件它的寄生参数
还有带来的一些过冲
还有它整个的一些尺寸 这些体积
都是这个隔离驱动变压器的一些缺点
那在这方面的话
TYPE B 基于这种数字隔离器
和上下管隔离器相匹配的系统
它就体现出了优势
原副边电容小于 1pF
寄生参数小 体积小
整个 PCB layout 做的也比较容易
然后它的尺寸也比较小
如果说我们单纯把这个需要的这些元器件
主要的元器件列下来
比如说我们在 TYPE A 和 TYPE B
作一个对比的话
我们就可以看到 TYPE A
如果要实现加强隔离
它的这个变压器体积非常的大
然后 TYPE B 的话
它都是就是一个数字隔离器
再加一个原副边的上管和下管的栅极驱动器
相对这两个的 PCB 的面积
它是减小了将近一半
然后体积减小的非常多
然后另外一种类型
就是把这个数字隔离器和上管和下管的隔离
它做成一个芯片
这个芯片的话
我们就叫做隔离栅极驱动器
它的这个 CMTI 的要求一般会性能就比较好
超过 100 伏每纳秒
它可以做到 5kV 的加强隔离
传输延时从原来的一百纳秒
降低到十九二十纳秒左右
然后它的这个通道的一致性
它的信号的畸变都是小于 5 个纳秒
而且这个办法它的 PCB 的面积是
又是 TYPE B 的一半
所以我们整个来看从 TYPE A
到 TYPE B 到 TYPE C
它的 PCB 面积减小超过了百分之七十
所以我们可以看到 A B C
在整个栅极驱动器里面的优点和缺点
UCC21520 隔离栅极驱动
就是我们 TI 2016年
刚好上市的一个双路隔离驱动
它的这个瞬态共模抑制参数是 100 伏每纳秒
minimum 就是最小值
然后它是 TI 我们第一款设计的隔离驱动
它也有些简单的保护功能
包括死区设置 欠压
还有它一些比较好的动态性能
它可以被用作两路低压侧同步整流驱动
也可以是一个半桥驱动
也可以作为两个高压侧驱动
所以它的设计是非常的方便
栅极驱动器设计它有输入
输出跟随输入实现相应的逻辑
对电压和电流进行放大
这个看似是一个非常简单的一个应用设计
但是它真的就那么简单吗
然后我们在下面这个我们培训过程当中
我们会详细介绍在驱动器设计
考虑寄生参数
考虑软开关硬开关
考虑大电流的驱动
针对 MOS 管的非线性电容
考虑这个 CMTI dv/dt
还有它的寄生的电感和电容
怎么能够实现原边和副边
信号地和功率地的分离
然后如何设计它的 power supply
进行一些详细的分析
所以我们下面是深入的去介绍
在整个的栅极驱动设计过程当中
我们怎么去优化
怎么去增强它的可靠性
怎么去减小它的损耗
首先我们去看一看在整个驱动电路当中
它有哪些寄生参数呢
首先就是这个我们要看的 MOS 管
以 MOS 管为例
它有它的寄生电容
输入电容是它的栅极???
CGS 加上 Miller cape CGD
它的 reverse cape 是CGD
它的输出电容是 CGD 再加上 CDS
在驱动芯片当中它内部有 wire bond
然后 PCB 这个是绿颜色的
它也会引起这种寄生电感
然后开通和关断的过程当中
它不是一个一阶系统
它是一个比较复杂的二阶
甚至更高阶的系统
它会有产生振荡
另外一个寄生参数就是
MOS 管的体二极管
这个二极管是 MOSFET 寄生二极管
这个二极管的特性是很难被优化
或者是你优化的这个二极管
其它的性能就得损失
所以这个二极管它不是
一个单独设计出来的二极管
它是一个 MOS 管的寄生体二极管
它作为一个寄生参数
在系统的应用当中也有很多考量
我们来看开通的这个过程
开通的过程的话就是
你先栅极超过开关点 电流增加
然后在 Miller 区间之内电压减小
完了之后电压再升高减小它 RDS(ON)
它的一些简化电路我们在
从 t0 刻到 t2 时刻
t2 到 t3 t3 到 t4
我们可以看到整个驱动器
它是针对哪一部分电流进行工作
从 t1 到 t3 是电流和电压它相互交叠的部分
它的积分就是乘积就是它的 power
它的损耗的 power
然后它的积分乘以它的频率就是它的损耗
然后我们可以看到你这个 t1 到 t3 的时间越长
你的损耗就越大
那怎么能够减小t1到t3这个时刻的时间段呢
那就是我们比较直观的办法
就是在栅极驱动的它的输出的电流
上拉电流能够把它增大
电流越大 t1 到 t2 时刻时间就越短
你的损耗就越小
关断可以作为开通的一个镜像
我们这边就不重复解释了
如果说考虑上管和下管
考虑这种体二极管或者是反向并联二极管
它的这个开通特性又有哪些不一样呢
首先我们可以看一看
左上角画的二极管的反向恢复
二极管的反向恢复这个是
我们教科书上给到的波形
它的正相电流在关断的时候
首先电流下降 有反过冲
然后再承受它的电压 VF
那把这个电压叠加到我们上一页讲的
这个开通的过程当中就可以看到
它在上管开通的时候
它有一个 overshoot 电流的一个过冲
那这个过冲就是反向恢复引起的
下管的反向恢复二极管引起的
然后这个里面就是我们作了个比较合理的假设
就是输出电感的电流是不变的
那我们可以看到体二极管
或者是反并联二极管引起的反向恢复
使得它的开通的损耗增大
对于这种超级结 SuperJunction MOSFET
它的这个二极管是一个体二极管
寄生二极管
对于 IGBT 它的二极管是一个反并联的二极管
那这个反并联的二极管是经过优化设计的
是一个快恢复二极管
那在整个的这个实验波形当中我们可以看到
对十安培开通 MOS 管它的反向恢复电流
可以冲到六七十安
超过五倍的负载电流
那 IGBT 的开通电流比如说是二十安
那它的反向恢复电流在这个时刻
它的峰值电流就只有十安
加上它的负载二十安
它就冲到三十安
所以我们可以看到 IGBT
它优化过的体二极管性能是要比
SuperJunction MOS 管的体二极管
寄生二极管的性能要好很多
针对这种反向恢复电流大的 di/dt
所引起的这种过冲
它就会反应到这个输入 Gate
就是栅极驱动上面
可以引起很大的振荡
这个振荡我们是要尝试去避免
它不但会引起这种电路的损耗
而且会使得它的过冲或者是下拉
会伤及到这个 MOS 管栅极驱动器的
这个可靠性
它会超过它的 spike
会引起内部的一些电路的损害
甚至使得输出的逻辑产生错误
然后考虑到这个寄生参数
一个比较可调的办法就是增加它的开通电阻
我们这边给了一张图
那就是通过增加它的驱动电阻
从 2 欧姆到 20 欧姆
可以看到它的 MOS 管的反向恢复电流
它的峰值电流它是有下降的
比如说
你在负载电流是 4 安的时候
它是从 50 安能够降到 40 安
还有百分之二十的优化
但是它的优化是有限度的
所以就是因为它的体的
寄生二极管性能是非常的差
所以考虑寄生二极管
加上它的这个寄生电感寄生电容
所产生的噪声
产生的这种噪音对系统是
必须要认真 合理的去考虑
如果说开通的电阻比较大
可以加反并联二极管
也可以选取那种上拉下拉是分开的栅极驱动器
那这样的话就可以节省一个
分散 离散的元器件二极管
考虑到刚才我们的硬开关和一些寄生参数
所带来的噪音
那另外一部分我们通过可以避免的就是软开关
软开关的话就是使得它的二极管不要导通电流
然后使得它的这 个switch node 电压能够降到 0
比如说 Totem pole PFC
它这个里面的作临界电流模式 transition mode
那通过电流一点点的过零
可以使得 switch node 电压从母线电压降到 0
然后再开通
然后另外一部分电流
现在比较流行的就是 LLC 软开关电路
它的电路是通过 Magnetic inductance
就是激磁电感在死区期间
对半桥的上管和下管的电容
进行充放电来实现软开关
在软开关的电路当中和硬开关的电路当中
栅极驱动器有哪些不一样呢
我们左边是我们讲的软开关的
左边是我们讲的硬开关的电路
右边的话就是软开关
那软开关就是你在开通之前
它的 Drain to Source 的电压已经降到了 0
它的体二极管已经打开
那这个时候你可以看得到
它的这个输入栅极驱动信号
它就没有米勒平台
它就直接是一个从 0 到高的一个过程
这个过程的话就是相当于是
它的输入电容 CGD 加 CGS 两个并联
从0一直驱动到它的最终的电源 VDD 电压
它的工作状态是从原来的两个状态
然后变成现在的一个状态
然后我们可以看到电压和电流
它是没有交叠 没有损耗
而且这个里面负载这个电流
就是 ID 这个电流
这个电流增加是由系统的电感来产生的
而不是它由它的负载电流
或者寄生参数来产生了一个非常大的 di/dt
所以它的 di/dt Current Slope 电流这个斜率
它是由电感来决定
那我们就知道电感电流它不会瞬间发生变化
它的 di/dt 就小了非常多
因此它还会优化系统的噪声
那我们来看一看
在软开关的电路当中
它是怎么样的一个驱动损耗呢
那我们左上角这张图是给出了
硬开关电路栅极驱动
再加上这个横坐标是它的栅极的电荷
这个是硬开关的波形
那如果是软开关驱动到 10V
那考虑到之前我们讨论过的
你开通和关断它的整个的这个损耗的计算
就是你的电压乘上你的驱动电荷 QG
所以它是这个方形的面积
长方形的面积
它是硬开关的 ON 加上硬开关的 OFF
如果是软开关的话
因为我们可以考虑它没有米勒平台
它就是输入电容 CGD 加上 CGS 两个并联
这个它的斜率就是跟随第三段线的斜率
它在 10V 以内
它开通的面积和 10V 硬开关关断的面积
它这两个加起来是软开关电路里面的损耗
我们可以看到这个软开关的损耗 QG_ZVS
它是要比硬开关的损耗是要小的
就是在软开关的电路当中
它不但没有二极管
寄生二极管引起的这个损耗
和硬开关的电压和电流的交叠
它也会减小栅极驱动器所需要的能量
那在讨论的这个软开关开通关断的过程当中
你选取一个比如说一百毫安的驱动器
和1安培或者是5安培的栅极驱动器
它在关断的过程当中有什么不一样呢
我们左边是一个选取的是相对来说
电流比较小的一个驱动器
然后如果说你选择一个大电流的驱动器
它的这个开关损耗是怎么样的一个过程呢
如果说在普通的半桥
然后中间 switch node 加电感
在大电流驱动器关断的时候
这个它的电压电流的变化
它不是
不由你原边的这个
像我们左边的这个曲线它有米勒平台
电压变化和电流变化
因为你的大的驱动电流
会使得你的漏极电流非常快的下降
如果说你能够考虑到你的寄生参数
比如说你在 0V 的时候
这个 MOS 管的 Coss 是6纳法
然后你在 400V 的时候它是小于30皮法
这个相当于差了两百倍
那这个非线性特性在实际的大电流驱动下
它的波形我们这边给出了一个简易的波形
我们就可以看得出它在电流非常大的时候
从负载电流慢慢下降的时候
就是这一段它的电压上来的是非常慢
因为在低压的时候它的电容非常大
它的电容非常大
那它产生的这个斜率就比较小
当它电流下降快
电流电压慢慢上升的时候
它这个电容就会变小
它的斜率就会增加
这个时候它的电流下降也快了起来
所以在大电流驱动考虑非线性电容
它的关断损耗实际上是非常小
而且这个关断的这个电压的变化
它不是你的 Gate 的电流来控制的
而是由你的负载电流
在低压的时候 Coss 它还是一个
就像一个自然的一个 Snubber
它能够让你的 dv/dt 变化非常快
那在高压的时候的你的电容非常小
你的电压变化非常快
所以你的损耗会变小
但是这个大的这个 dv/dt
就使得你的系统里面会产生一些 Cdv/dt
还有 Ldi/dt 所引起的振荡
然后我们这一页给出了
大电流关断下面电压和电流的波形
所以我们这边看到的那个粉色线是它的
开通关断电压就是驱动电压
然后中间的绿色的波形是它的开关的电流
然后蓝色的是它的 Drain to Source 的电压
如果说把这个关断的过程能够放大
你可以看得出来
它的这个电压初始上升是非常慢的
然后当它的电压上升到一定程度的时候
它的电压才 dv/dt 才会变化
这个时候我们可以看到
它其实是一个 5 伏每纳秒
就是我们从左边的 100 伏每纳秒
Zoom IN 就是放大到 5 伏每一个
我们可以看到这个时候
电流在下降的过程当中
电力电压在很快的上升
有趣的是我们可以观察一下
这个 Gate 都已经完全降到了 0 了
但是电流还没有降到 0
那这个电流是我们实际测到的这个开关的电流
这个电流从外部去测量去看
它是一个就是 MOS 管的内部的通道的电流
和它寄生电容电流的和
那我们这个和
这两个加起来之和是我们现在看到这个绿色的
那绿色的在 Gate 栅极电压降到零之后
这个电流在这一瞬间
它是没有像我们课本上看到的这个
这种它的电流是马上降下来
那这部分电流我们怎么去理解呢
这个是一个把一个开关的电流分解成
它的电容电流
输出电容 Coss 电流再加上通道电流
那这个的话我们可以看成是
一个 LLC 电路关断电路
那再把它分成四个阶段
第一 第二 第三和第四
第一个阶段的话
它是一个电流通过通道续流的阶段
相当于是这个电流是通过这个电感
通过电容
然后通过 S1 的 Drain 流到 S1 的 Source
当你这个 S1 关掉之后
那比如说第二阶段
它是从它的 plat node 降到了它的 switchnode
那这一部分过程当中
它的通道的电流肯定是降到零了
从 IM 降到 0
那由于这个栅极驱动它特别的强
那 Miller 到这个 switchnode 的区间
就会变的非常的短
这一部分就是你的负载电流减去通道电流
就变到了 Coss 的电流
Coss 电流就是我们看到的这个 ID_Coss
那 Coss 电流的话因为这个时候
它的负载电流是不变的
这部分 Coss 电流
它没有引起足够高的 Drain to Source 的变化
这个是蓝色的曲线在下面
因为在低压的时候
输出电容它的电容非常大
是纳法级的
所以这个时候你从 0 到 IM
再增加这个很快的过程当中
漏极到源极的电压基本上增加的非常的小
那当第二个阶段结束之后到第三个阶段
你的整个通道电流已经关断了
然后你的激磁电感的电流
再给 Coss1 和Coss2 放电和充电
那这部分电流就第三个阶段这部分电流
就相当于是这两个电容电压是已经升高到一部分
那这两个电容都会是并联
然后充放电结束这个关断的过程
第四个阶段就是你 S1 充电超过母线电压
使得 S2 的体二极管导通
在第二阶段这部分因为时间非常的短
因为你栅极驱动非常的强
它从 Coss 上的电流从 0 到 Im 增加
使得这个 Vds_s1 电压增长的非常慢
电压非常低的时候
它电容是非常大的
所以在这个阶段是 Coss1 是起主导作用
所以在这段时间之内你的负载电流
我们就可以认为它全部流向了 Coss1
这部分电压和电流交叠是实际的关断损耗
其它的这种交叠
比如说第三阶段的电压和这个 Coss 的交叠
这部分能量存储到这个 Coss 上面了
这部分能量的话
在下一个软开关的时候能够被释放到负载
它这部分能量是不算
所以实际的关断的损耗是要非常小
这部分能量是被 Recovered 到开通
但是我们由于这个非线性电容
它在电压上升的过程当中
它的电容变小它的 dv/dt 就会变高
那 dv/dt 和 di/dt 在高的时候
会引起电路的振荡
在高的 dV/dt 的情况下面
它在电路里面会对系统产生哪样的影响呢
这个是一个把栅极上管和下管
驱动器内部电路画出来
包括它的一些外围电路
当你的 switchnode 看到
这个 dv/dt 的过程当中
高的 dv/dt 的过程当中
它会通过一些寄生的电容
这个寄生的电容包括
这个 Level Shift 原副边的电容
包括这个自举二极管的结电容
通过原边的电路一直耦合到
你的系统的功率地
那这部分的噪音就会产生大的噪声
就像下面这个波形
它的蓝色的显示它的输入
它的紫色的显示它的输出
你可以看到输出
在有些脉冲是没有输出的
输出的就会出现丢波
这个就是因为你原边的噪音
大到一定程度的时候
会产生了使得这个驱动器它不正常工作
看到这个 dv/dt 我们也可以看看
这个 MOS 管和氮化镓器件 dv/dt 的一些差别
那我们可以看到 dv/dt 氮化镓的宽禁带器件
是 MOS 管的超过三倍以上
然后它的这个 di/dt 是
SJ-MOSFET 的超过十倍
所以随着宽禁带器件不断的发展
对驱动器的 dv/dt 的要求越来越高
对整个电路系统的设计也要求比以前更严格
那怎么去设计这个上管和下管隔离
上管和下管驱动器它的能够
使它能够抗 dv/dt 能力更高呢
那我们这个里面就做出了一些解释
就说在 27714 当中我们在低压侧
有这个原边和副边的 Level Shift
这样的话我们原副边就会产生两个地
一个信号地 一个是功率地
通过这个驱动器内部 Level Shift 电路
把这两个分开
那这两个分开之后
我们在把二极管左侧加一个蓝色
这个蓝色的线 大电容
使得它开关噪音在这个小的 loop 里面
能够通过 PCB 的 layout
让它形成一个很小的 loop 回到功率地
然后在原边和副边整个的
这个自举的充电的过程当中加一些电容和电阻
我们就可以看到就是
这一部分 dv/dt 所产生的噪声
它被限制在功率地
使得它信号地相对就比较干净
噪声小使得这个问题解决掉
所以 27714 在处理 dv/dt 的过程当中
也是做了专门的内部电路设计
那讨论完了 dv/dt
然后另外一部分就是这个 di/dt
我们知道这个 di/dt 的变化如果过快的话
它从这个 switchnode 到地
在开关管关断的时候
开关管关断的 上管关断的时候电流下降
然后下管的电流在上升
这部分的话就是因为负载电流
在这个时候就是 assume 假设它是不变的
因为开关的瞬间时间是非常短
在几百纳秒
电感的电流在这个时候是变化是非常微小的
那我们可以看到当这个电流
它在往上增加的时候
电感引起的反向电压
就使得 switch node 的电压低于这个地的电压
电压低到一定程度之后就会产生 Driver malfunction
为了针对这个功能
那 UCC27714它的这个负向瞬态安全工作区
就做了合理的优化
比如在200纳秒的时候它可以承受-30V
如果是100纳秒它可以承受-70V 的电压
所以使得栅极上管和下管驱动器
更加的抗干扰能力增强
然后 TIDA-01159
这个是一个 TI 给的参考设计
它是针对我们刚开始讲的 UCC21520和
SN6505 设计的一个小的单元模块
包括电源
包括隔离驱动器形成的一个驱动半桥的 EVM
所以详细的信息可以在 TI.com
搜索 TIDA-01159 获取详细的信息
这边我们给出一个总结
所以我们这个里面讲到了 Gate Driver
栅极驱动器的应用
讲了一些基本的一些参数的了解
讨论到低压侧高压侧和低压侧
还有包括隔离驱动
除此之外我们深入的讨论了寄生参数
软开关 硬开关 非线性电容
以及 dv/dt di/dt 所产生的噪声
和怎么通过 PCB 的解决
和选取合理的 Gate driver 去避免这些问题
作了深入的探讨
详细的信息也在 TIDA 当中
给出了一些案例
那非常感谢大家花时间来参加这个培训
如果有什么问题请及时的做出反馈
谢谢大家
大家好 我叫张巍 在 TI 担任系统工程师 今天我们来讨论一下熟练掌握 高压 MOSFET 和 IGBT 栅极驱动器设计 Mastering the Art and Fundamentals of High Voltage Gate Driver 我们在这堂培训课程当中会学到什么呢 我们会了解一下栅极驱动器的应用领域 什么是低压侧驱动 什么是高压侧和低压侧驱动 什么是隔离驱动以及如何优化驱动器设计 包括电路的集成参数 软开关和硬开关 高的 dv/dt 和 di/dt 以及隔离驱动 我们涉及到的一些芯片包含 UCC2751x 2752x UCC27x24 低压侧驱动 UCC2771x 是 600V 的高压侧和低压侧驱动 以及 UCC2152x UCC2122x 和 UCC53x 是隔离驱动 TI 的一些参考设计 包括 TIDA-01160 TIDA-01159 PMP20873 涉及到的一些应用的场合包括 UPS 通信 Server 还有 Solar motor drive 我们先来讨论一下栅极驱动器的应用领域 完了之后我们会从特别基础的了解 低压侧驱动 高压侧和低压侧驱动 以及隔离驱动 在了解了基本的常识之后 我们会深入探讨在系统的 电力电子系统当中如何设计优化栅极驱动器 最后我们会给出一些 TI 的一些设计参考 我们先来看栅极驱动器它的一些应用领域 它的应用领域非常广 包括锂电池充电 包括笔记本和手机的充电器 Server/Telecom/UPS 也包括 Electric Vehicles 还有 Class D 或者 Class E Audio 包括马达驱动 新能源 太阳能光伏 也包括 led 的驱动 Solid State Lighting 总之栅极驱动器它是应用于每一个 MOSFET IGBT 这些功率器件也包括最新的宽禁带器件 比如 GaN 氮化镓 SiC 和碳化硅器件 在 Server 和 Telecom 这个应用当中 我们这边给了一张图 输入的话是 85V 到 265V AC 经过 EMI Filter 到 PFC PFC 的输出基本上是 400V 的母线 然后 400V 到 48V 是 对这种带电池的 Teleccom 或者直接到 12V Server 这个里面我们给了一个电路的拓扑 包括原边的 PFC 和基于 LC 的 400V 到 48V 的系统 然后同步整流有桥式同步整流 也有这种全波整流 对 PFC 的话也有现在 我们宽禁带器件没有反向恢复 使得 Totem Pole PFC 在现在的 高效率高功率密度当中颇为广泛 粉色区域我们现在 high light 的都是 单个通道或者双通道的低压侧驱动 低压侧驱动就主要是指 它都是基于一个参考地 然后我们也有高压侧和低压侧驱动 就比如这种全桥电路上管和下管 100V 200V 是针对 48V 的母线 600V 是针对 400V 的母线 我们也有 Isolated gate driver 就是在所有的系统当中 不管是低压侧驱动还是高压侧和低压侧驱动 隔离驱动它作为现在越来越广泛的驱动形式 在任何的驱动场合当中都能够找得到 另外一个场合的话 我们这边给出的就是 Electric Vehicles 像电动汽车 新能源和马达驱动 我们下面给的这个拓扑的话就是 一个双向的太阳能汽车充电和电网连接 400V 的母线到输出是一个宽范围 200 到 400V 或者用于给汽车电池充电 或者是给太阳能板子把电量能够送回到电网 400V 也可以用于一些家电 白色家电设备 变频空调 变频电冰箱 还有一些其它的马达驱动和手动工具 这个也可以是 48V 的电池 也可以是 20V 的电池 当然其它一些马达驱动 包括 traction motor drive 就是汽车的牵引马达设计 还有像内部的 internal belt driven generator 它都是基于三相三个半桥 三相六个 switch 六个管子 来组成的马达驱动电路 对于每一个 MOSFET 来讲 在 100V 场合 200V 场合 或者 600V 场合或者是隔离驱动 都能够找到它应用的领域 我们都有哪些功率元器件 需要栅极驱动去驱动呢 我们这边给了几个例子 第一个就是 Si-MOSFET 就是基于我们 基于硅的传统的 MOSFET 它的电压一般在 20V 到 650V 还有 IGBT 一般 IGBT 都是 650V 场合以上 针对的功率设计都在三千瓦以上甚至更高 还有碳化硅的 MOSFET 它是电压范围基本在 650V 以上 而且还有 Nom-ON 和 Nom-OFF 的 宽禁带氮化镓器件 这些的话基本上是在 650V 或者是 100V 场合 每一个器件的驱动的电压范围不一样 像硅就是 12V 左右 IGBT 是 15V 碳化硅的话对不同的厂家不一样 有些是 15V 有些是 20V 氮化镓的话 有一些是 Si-MOS cascode 结构 它是 10V 去驱动 然后有一些是 Nom-OFF enhancement mode 它是 5V 驱动 关断的话 根据这个噪音的场合不一样 噪音大的会用负电压去关断 比如 IGBT 它会到 -8V SiC 到 -5V 然后 GaN 的话 -3V 它的一些电流电压曲线 就 I-V curve 我们也可以看到 针对 SiC 来讲 10V 就是够用了 IGBT 的话是超过12V 是好的 SiC-MOSFET 的话它的范围比较宽 一般 20V 的是一个比较优化的性能 氮化镓器件的话它的最大电压是 6V 但是 5V 或者 5.5V 就能够比较好的开通 氮化镓器件使得它的 RDS(ON) 通态电阻达到一个比较理想的水平 针对比较早的传统的栅极驱动电路 一般都是采用离散的元器件 它的输入的话是 控制器出来 3.3V 或者 5V 的信号 通过这个 Level Shift 电平转移 move up 就是把它电平能够转移到高一点去驱动 PNP NPN 的 Totem Pole 然后通过它的放大输出 再接到 MOS 管的栅极驱动 它输入是 3.3V 或者 5V 输出是 12V 它有电压和电流的放大 但是我们可以看到 在一个单路栅极驱动 它这个里面包括超过数十个器件 然后我们现大在家通常都采用的 是一个集成的单路 MOS 管栅极驱动 它可以去降低这个 BoM component 器件的总数量 可以减小 PCB 的这个面积 而且它也有带有一些其它的一些保护功能 比如说它有欠压保护 比如说它有输入的最小脉宽要求 当然把很多元器件集成之后 也可以增加它的一些可靠性能 哪一些低压侧的驱动是我们应该去选的呢 第一个我们要看的就是你是单路还是双路 比如说 你是一个单向的 PFC 那你一个单路就够了 如果是一个两相 interleave PFC 你可能会选一个 UCC2752x 它是一个双路 然后 UCC2751x 它分为两个输入 你可以是正向输入 你也可以是反向输入 就看你的逻辑是正还是反 而且双路驱动里面它也有反向驱动 2751x 系列它也包含 输出的上拉和下拉是两个分开的 pin 这样的话你就可以去调整 开通的速度和关断的速度 使得实现系统完整的性能更加优化 这个半桥驱动它是怎么工作的呢 半桥驱动里面的下管 其实就是一个低压侧驱动 你输入的话是一个控制器 输出的话是 MOS 管的话就是 12V 10V 如果说是低压的 MOS 可能会到 5V 那高压侧的呢 高压侧的话 因为这个输出的 ground 地的这个参考 它是这个 switch node 我们这个点叫 HS 这个 HS 的话 HS 它是根据开关管的开通或者关断 它是在零和母线电压来回跳动 那在这个跳动的电压过程当中 你就要实现信号的 Level Shift 或者是隔离 比如说你原边的信号是基于这个信号的地 但是你的输出是 HS 你怎么能够把这个信号 从低压侧传输到高压侧呢 这个在半导体的集成工艺当中 它就有电路叫 Level Shift 它通过低压去控制高压的管子 把信号传输到高压侧 在信号的隔离之外 而且你得需要提供电源 因为在开通的时候你必须保证 有 10V 的电压加在上管的这个栅极上面 我们可以看到在正常工作的时候 高压侧的输入信号它是针对于信号地的 但是高压侧的输出信号 它是在母线电压以上 就是如果说母线是 100V 那就是 100V 如果说母线是 700V 那就是基于 700V 的电压 那你的 HO 电压就是在这个 700V 之上 再加一个 10V 的驱动或者 5V 或者 12V 对于一些低压 100V 的场合 很多的驱动它都把这个自举的 这个二极管 DBoot 集成到这个芯片里面 你 100V 的二极管的性能 要比高压 700V 的二极管的性能会好很多 所以 100V 栅极驱动器 集成自举二极管的概率比较大 在高压 600V 到 700V 的场合 自举二极管一般都采用外加的 discrete 就是分散元器件 所以针对这种 100V 到 700V 的应用场合 TI 的话它是有 UCC27714是 600V UCC27201是 100V UCC27712 是 600V 它是一个 这些都是双通道 27800 所以它都是双通道上管和下管 除了我们刚才讲的这些基本的电路之外 在输入侧如果说它的 PCB 的 layout 距离比较长 会加一些 RC 的滤波 然后再输出侧的话 根据开通和关断 它可以加一个反并联二极管使它的关断更慢 加开通电阻使得它开通的 di/dt 引起的这种过冲 dv 还有它的 overshoot 电压的过冲会小一些 当我们选这个栅极驱动芯片的时候 有哪些参数需要注意呢 第一个就是静态参数 静态参数里面 它基于这种供电电压和它的欠压保护 这个是我们第一个要看的 比如说氮化镓器件它就是 7V 到 14V 7V 是这个是 100V 的上下管驱动 然后5114是低压侧驱动 20V 到 25V 是 UCC2771x 或者是 UCC27201x 针对这种 MOS 管和 IGBT 的驱动 35V 的话一般都是 GaN 的 MOSFET 因为它的工作电压是 0 到 20V 如果加负压的话是 -5V 到的 20V 那就是 25V 它需要一些其它的余额 35V 是一个比较合理的供电最高电压 另外一个的话就是它的驱动电流 驱动电流直接是和你的 驱动的这功率管的大小 电流的大小 比如说 你是 10 安培的 MOSFET 或者是 100 安培的 MOSFET 它的栅极的电容 需要的这个驱动电流能力是不一样 对这种驱动电流的话 一般有对称的和不对称 如果对称的话 就是说你的开通上拉电流 和关断下拉电流它是一样的 比如说都是 4 安 27714 或者是27201是3安 它也有这种不对称 就是你开通的时候要比关断的时候小一些 这个是主要是针对于开通的时候 它是由反向恢复电流引起的 这种过冲或者是下拉 来减缓它开通引起的这种噪音 然后关断的话对 MOS 管来讲 它的输出电容是一个自然的一个 Snubber 所以它关断的时候 你越大的电流产生的这个问题 就不包括反向恢复 所以它关断的时候大的电流可以使得 它的关断的 lose 损耗减小 第三个就是输入的逻辑电平类型 第一种就是 TTL 和 CMOS Compatible 就是你是 TTL 电平 CMOS 电平都是兼用 这种的话一般都是用于输入数字控制器 它的输出的话是 3.3V 那在这种场合 一般都会选择 TTL 或者 CMOS Compatible 但如果说这个输入是另外一种类型 是 CMOS 的话 它一般开通电压是供电电压的百分之五十五 就是说你如果要满足完整开通 一般输入电平的设计需要 高于电源的百分之七十 就是 0.7 倍的 VDD 还有一个就是高压侧和低压侧驱动 它的 Boot 电压 自举的电压 那如果是 100V 那你就需要选择 比如说 UCC272xx系列 它的 Boot 电压是100 加上它的上管驱动电压 就是 100V 再加 20V 还有600V 的电压再加 20V 620V 另外一种类型就是动态参数 动态参数就是第一个就是传输延时 第二个就是上升时间和关断时间 就是这个是反映了驱动器驱动电流的大小 还有传输延迟的这种匹配 比如说你上管和下管在同时开通的时候 这两个的一致性如何 还有就是输入的最小带宽 如果说你 1 纳秒的噪音 都能够让你的输出打开的话 这可能对电力电子噪音比较多的系统里面 它不是推荐的 比如说 如果说出现 5 纳秒的噪音 我希望这个栅极驱动器能够把它屏蔽掉 最后一类重要的要考虑的就是它的封装 封装的话对功率密度要求比较高的 比如说 WSON-6 2x2 的封装 也有 3x3 的 SOT-23 还有普通的这种 SOIC 的封装 或者是 SO-PwrPad 或者 TSSOP TI 是提供 这些封装都在我们的这个产品的 这个系列里面都有 客户可以根据你自己对自己的场合 到底是贴片的 还是直插的 还是有立的 还是说没有 pin 脚的 可以根据这些要求来选择合理的封装 除了我们刚才讨论的一些基本参数之外 另外一个要求就是 你这个栅极驱动器需不需要隔离 在一个电子电子系统当中 如果说是和电网连接 电网连接就有雷击 为了能够保证人员的安全 它在功率部分都需要设计隔离 就是比如说 400V 到 12V 它这一级有一级隔离 那这一级隔离的话 它不但能够起到 比如说电压通过变比把高压变到低压的作用 而且能够防止在电网侧出现雷击 然后在 load 负载这一侧 人们不受到雷击这种高压的这种危害 在功率电路之外 另外一个就是你在控制电路也需要隔离 否则这个电路就不是隔离 下面这个里面来讲 就是说你的输出侧 在副边有反馈 原边需要驱动 然后这个在整个的控制电路当中也要做隔离 那控制电路当中做隔离 你可以通过光耦做反馈 然后通过驱动高压侧和低压侧来做驱动 你也可以通过隔离变压器 把信号传输到原边 你也可以通过隔离的栅极驱动器 来驱动原边的 MOS 管 对于这种不同的要求 比如说你的输入电压不一样 对于这种基本隔离和加强隔离的隔离等级 在 IEC 的标准 UL 和 BDE 的标准当中 都有详细的描述 所以客户可以根据这种终端系统里面 系统的设计要求 选择隔离等级到底是 基本隔离还是加强隔离 要实现隔离驱动 我们这个里面先讲两种 我们现在常用的第一个就是 通过隔离变压器 就是我们这边说的 TYPE A 那隔离变压器它从 controller 控制器 拿到信号之后先必须经过一级放大 把它的电压和电流都能够放大 放大之后它到变压器的原边 然后副边经过两路信号送到我们的半桥 另外 TYPE B 就是我们可以先用 数字隔离器把信号从原边传到副边 然后再通过高压侧和低压侧 或者是用上侧驱动用自举电路 来实现高压侧和低压侧的半桥驱动 这两种办法各有优缺点 基于这种隔离变压器的栅极驱动设计 它的优点就是它的传输延时比较小 所以单纯靠看这个低压侧驱动 再加上变压器驱动 如果说考虑这个其它的电阻电容的话 它一般在 20 纳秒左右 而且它不需要高压侧的这个电源去设计 因为变压器它不但能够传输信号 而且能够传输 power 就是传输它的瞬间需要的开通电流 然后对这两点来讲的话 这个 TYPE B 的话 它的传输延时 因为它需要高压侧和低压侧的 Level Shift 所以 Level Shift 它防止噪音 它就需要加一些 需要一定的时间来去甄别 所以它的驱动的延时相对来说会大一些 而且它是需要这种副边的供电 就比如说你这个数字隔离器的副边 它是需要这种 比如说你 12V 加个 LDO 再给它供电 这个和原边的电路是不共地的电源 但是如果说我们把这个整个电路 如果考虑齐全 为了保证信号的完整性 隔离驱动器它不是像我们刚才那样的 实际的电路当中 它会加一些其它的离散元器件 二极管 稳压管 电阻 三极管 来使得它的开通和关断 能够达到比较理想的状态 那这样一比的话 我们就会看到它的 TYPE A 的一些劣势 就比如说原副边这种耦合电容 通过变压器要耦合的非常好的时候 它这个原副边的这种耦合电容 一般都会超过 10pF 它的这些寄生参数 因为是变压器寄生电感 再加上很多离散元器件它的寄生参数 还有带来的一些过冲 还有它整个的一些尺寸 这些体积 都是这个隔离驱动变压器的一些缺点 那在这方面的话 TYPE B 基于这种数字隔离器 和上下管隔离器相匹配的系统 它就体现出了优势 原副边电容小于 1pF 寄生参数小 体积小 整个 PCB layout 做的也比较容易 然后它的尺寸也比较小 如果说我们单纯把这个需要的这些元器件 主要的元器件列下来 比如说我们在 TYPE A 和 TYPE B 作一个对比的话 我们就可以看到 TYPE A 如果要实现加强隔离 它的这个变压器体积非常的大 然后 TYPE B 的话 它都是就是一个数字隔离器 再加一个原副边的上管和下管的栅极驱动器 相对这两个的 PCB 的面积 它是减小了将近一半 然后体积减小的非常多 然后另外一种类型 就是把这个数字隔离器和上管和下管的隔离 它做成一个芯片 这个芯片的话 我们就叫做隔离栅极驱动器 它的这个 CMTI 的要求一般会性能就比较好 超过 100 伏每纳秒 它可以做到 5kV 的加强隔离 传输延时从原来的一百纳秒 降低到十九二十纳秒左右 然后它的这个通道的一致性 它的信号的畸变都是小于 5 个纳秒 而且这个办法它的 PCB 的面积是 又是 TYPE B 的一半 所以我们整个来看从 TYPE A 到 TYPE B 到 TYPE C 它的 PCB 面积减小超过了百分之七十 所以我们可以看到 A B C 在整个栅极驱动器里面的优点和缺点 UCC21520 隔离栅极驱动 就是我们 TI 2016年 刚好上市的一个双路隔离驱动 它的这个瞬态共模抑制参数是 100 伏每纳秒 minimum 就是最小值 然后它是 TI 我们第一款设计的隔离驱动 它也有些简单的保护功能 包括死区设置 欠压 还有它一些比较好的动态性能 它可以被用作两路低压侧同步整流驱动 也可以是一个半桥驱动 也可以作为两个高压侧驱动 所以它的设计是非常的方便 栅极驱动器设计它有输入 输出跟随输入实现相应的逻辑 对电压和电流进行放大 这个看似是一个非常简单的一个应用设计 但是它真的就那么简单吗 然后我们在下面这个我们培训过程当中 我们会详细介绍在驱动器设计 考虑寄生参数 考虑软开关硬开关 考虑大电流的驱动 针对 MOS 管的非线性电容 考虑这个 CMTI dv/dt 还有它的寄生的电感和电容 怎么能够实现原边和副边 信号地和功率地的分离 然后如何设计它的 power supply 进行一些详细的分析 所以我们下面是深入的去介绍 在整个的栅极驱动设计过程当中 我们怎么去优化 怎么去增强它的可靠性 怎么去减小它的损耗 首先我们去看一看在整个驱动电路当中 它有哪些寄生参数呢 首先就是这个我们要看的 MOS 管 以 MOS 管为例 它有它的寄生电容 输入电容是它的栅极??? CGS 加上 Miller cape CGD 它的 reverse cape 是CGD 它的输出电容是 CGD 再加上 CDS 在驱动芯片当中它内部有 wire bond 然后 PCB 这个是绿颜色的 它也会引起这种寄生电感 然后开通和关断的过程当中 它不是一个一阶系统 它是一个比较复杂的二阶 甚至更高阶的系统 它会有产生振荡 另外一个寄生参数就是 MOS 管的体二极管 这个二极管是 MOSFET 寄生二极管 这个二极管的特性是很难被优化 或者是你优化的这个二极管 其它的性能就得损失 所以这个二极管它不是 一个单独设计出来的二极管 它是一个 MOS 管的寄生体二极管 它作为一个寄生参数 在系统的应用当中也有很多考量 我们来看开通的这个过程 开通的过程的话就是 你先栅极超过开关点 电流增加 然后在 Miller 区间之内电压减小 完了之后电压再升高减小它 RDS(ON) 它的一些简化电路我们在 从 t0 刻到 t2 时刻 t2 到 t3 t3 到 t4 我们可以看到整个驱动器 它是针对哪一部分电流进行工作 从 t1 到 t3 是电流和电压它相互交叠的部分 它的积分就是乘积就是它的 power 它的损耗的 power 然后它的积分乘以它的频率就是它的损耗 然后我们可以看到你这个 t1 到 t3 的时间越长 你的损耗就越大 那怎么能够减小t1到t3这个时刻的时间段呢 那就是我们比较直观的办法 就是在栅极驱动的它的输出的电流 上拉电流能够把它增大 电流越大 t1 到 t2 时刻时间就越短 你的损耗就越小 关断可以作为开通的一个镜像 我们这边就不重复解释了 如果说考虑上管和下管 考虑这种体二极管或者是反向并联二极管 它的这个开通特性又有哪些不一样呢 首先我们可以看一看 左上角画的二极管的反向恢复 二极管的反向恢复这个是 我们教科书上给到的波形 它的正相电流在关断的时候 首先电流下降 有反过冲 然后再承受它的电压 VF 那把这个电压叠加到我们上一页讲的 这个开通的过程当中就可以看到 它在上管开通的时候 它有一个 overshoot 电流的一个过冲 那这个过冲就是反向恢复引起的 下管的反向恢复二极管引起的 然后这个里面就是我们作了个比较合理的假设 就是输出电感的电流是不变的 那我们可以看到体二极管 或者是反并联二极管引起的反向恢复 使得它的开通的损耗增大 对于这种超级结 SuperJunction MOSFET 它的这个二极管是一个体二极管 寄生二极管 对于 IGBT 它的二极管是一个反并联的二极管 那这个反并联的二极管是经过优化设计的 是一个快恢复二极管 那在整个的这个实验波形当中我们可以看到 对十安培开通 MOS 管它的反向恢复电流 可以冲到六七十安 超过五倍的负载电流 那 IGBT 的开通电流比如说是二十安 那它的反向恢复电流在这个时刻 它的峰值电流就只有十安 加上它的负载二十安 它就冲到三十安 所以我们可以看到 IGBT 它优化过的体二极管性能是要比 SuperJunction MOS 管的体二极管 寄生二极管的性能要好很多 针对这种反向恢复电流大的 di/dt 所引起的这种过冲 它就会反应到这个输入 Gate 就是栅极驱动上面 可以引起很大的振荡 这个振荡我们是要尝试去避免 它不但会引起这种电路的损耗 而且会使得它的过冲或者是下拉 会伤及到这个 MOS 管栅极驱动器的 这个可靠性 它会超过它的 spike 会引起内部的一些电路的损害 甚至使得输出的逻辑产生错误 然后考虑到这个寄生参数 一个比较可调的办法就是增加它的开通电阻 我们这边给了一张图 那就是通过增加它的驱动电阻 从 2 欧姆到 20 欧姆 可以看到它的 MOS 管的反向恢复电流 它的峰值电流它是有下降的 比如说 你在负载电流是 4 安的时候 它是从 50 安能够降到 40 安 还有百分之二十的优化 但是它的优化是有限度的 所以就是因为它的体的 寄生二极管性能是非常的差 所以考虑寄生二极管 加上它的这个寄生电感寄生电容 所产生的噪声 产生的这种噪音对系统是 必须要认真 合理的去考虑 如果说开通的电阻比较大 可以加反并联二极管 也可以选取那种上拉下拉是分开的栅极驱动器 那这样的话就可以节省一个 分散 离散的元器件二极管 考虑到刚才我们的硬开关和一些寄生参数 所带来的噪音 那另外一部分我们通过可以避免的就是软开关 软开关的话就是使得它的二极管不要导通电流 然后使得它的这 个switch node 电压能够降到 0 比如说 Totem pole PFC 它这个里面的作临界电流模式 transition mode 那通过电流一点点的过零 可以使得 switch node 电压从母线电压降到 0 然后再开通 然后另外一部分电流 现在比较流行的就是 LLC 软开关电路 它的电路是通过 Magnetic inductance 就是激磁电感在死区期间 对半桥的上管和下管的电容 进行充放电来实现软开关 在软开关的电路当中和硬开关的电路当中 栅极驱动器有哪些不一样呢 我们左边是我们讲的软开关的 左边是我们讲的硬开关的电路 右边的话就是软开关 那软开关就是你在开通之前 它的 Drain to Source 的电压已经降到了 0 它的体二极管已经打开 那这个时候你可以看得到 它的这个输入栅极驱动信号 它就没有米勒平台 它就直接是一个从 0 到高的一个过程 这个过程的话就是相当于是 它的输入电容 CGD 加 CGS 两个并联 从0一直驱动到它的最终的电源 VDD 电压 它的工作状态是从原来的两个状态 然后变成现在的一个状态 然后我们可以看到电压和电流 它是没有交叠 没有损耗 而且这个里面负载这个电流 就是 ID 这个电流 这个电流增加是由系统的电感来产生的 而不是它由它的负载电流 或者寄生参数来产生了一个非常大的 di/dt 所以它的 di/dt Current Slope 电流这个斜率 它是由电感来决定 那我们就知道电感电流它不会瞬间发生变化 它的 di/dt 就小了非常多 因此它还会优化系统的噪声 那我们来看一看 在软开关的电路当中 它是怎么样的一个驱动损耗呢 那我们左上角这张图是给出了 硬开关电路栅极驱动 再加上这个横坐标是它的栅极的电荷 这个是硬开关的波形 那如果是软开关驱动到 10V 那考虑到之前我们讨论过的 你开通和关断它的整个的这个损耗的计算 就是你的电压乘上你的驱动电荷 QG 所以它是这个方形的面积 长方形的面积 它是硬开关的 ON 加上硬开关的 OFF 如果是软开关的话 因为我们可以考虑它没有米勒平台 它就是输入电容 CGD 加上 CGS 两个并联 这个它的斜率就是跟随第三段线的斜率 它在 10V 以内 它开通的面积和 10V 硬开关关断的面积 它这两个加起来是软开关电路里面的损耗 我们可以看到这个软开关的损耗 QG_ZVS 它是要比硬开关的损耗是要小的 就是在软开关的电路当中 它不但没有二极管 寄生二极管引起的这个损耗 和硬开关的电压和电流的交叠 它也会减小栅极驱动器所需要的能量 那在讨论的这个软开关开通关断的过程当中 你选取一个比如说一百毫安的驱动器 和1安培或者是5安培的栅极驱动器 它在关断的过程当中有什么不一样呢 我们左边是一个选取的是相对来说 电流比较小的一个驱动器 然后如果说你选择一个大电流的驱动器 它的这个开关损耗是怎么样的一个过程呢 如果说在普通的半桥 然后中间 switch node 加电感 在大电流驱动器关断的时候 这个它的电压电流的变化 它不是 不由你原边的这个 像我们左边的这个曲线它有米勒平台 电压变化和电流变化 因为你的大的驱动电流 会使得你的漏极电流非常快的下降 如果说你能够考虑到你的寄生参数 比如说你在 0V 的时候 这个 MOS 管的 Coss 是6纳法 然后你在 400V 的时候它是小于30皮法 这个相当于差了两百倍 那这个非线性特性在实际的大电流驱动下 它的波形我们这边给出了一个简易的波形 我们就可以看得出它在电流非常大的时候 从负载电流慢慢下降的时候 就是这一段它的电压上来的是非常慢 因为在低压的时候它的电容非常大 它的电容非常大 那它产生的这个斜率就比较小 当它电流下降快 电流电压慢慢上升的时候 它这个电容就会变小 它的斜率就会增加 这个时候它的电流下降也快了起来 所以在大电流驱动考虑非线性电容 它的关断损耗实际上是非常小 而且这个关断的这个电压的变化 它不是你的 Gate 的电流来控制的 而是由你的负载电流 在低压的时候 Coss 它还是一个 就像一个自然的一个 Snubber 它能够让你的 dv/dt 变化非常快 那在高压的时候的你的电容非常小 你的电压变化非常快 所以你的损耗会变小 但是这个大的这个 dv/dt 就使得你的系统里面会产生一些 Cdv/dt 还有 Ldi/dt 所引起的振荡 然后我们这一页给出了 大电流关断下面电压和电流的波形 所以我们这边看到的那个粉色线是它的 开通关断电压就是驱动电压 然后中间的绿色的波形是它的开关的电流 然后蓝色的是它的 Drain to Source 的电压 如果说把这个关断的过程能够放大 你可以看得出来 它的这个电压初始上升是非常慢的 然后当它的电压上升到一定程度的时候 它的电压才 dv/dt 才会变化 这个时候我们可以看到 它其实是一个 5 伏每纳秒 就是我们从左边的 100 伏每纳秒 Zoom IN 就是放大到 5 伏每一个 我们可以看到这个时候 电流在下降的过程当中 电力电压在很快的上升 有趣的是我们可以观察一下 这个 Gate 都已经完全降到了 0 了 但是电流还没有降到 0 那这个电流是我们实际测到的这个开关的电流 这个电流从外部去测量去看 它是一个就是 MOS 管的内部的通道的电流 和它寄生电容电流的和 那我们这个和 这两个加起来之和是我们现在看到这个绿色的 那绿色的在 Gate 栅极电压降到零之后 这个电流在这一瞬间 它是没有像我们课本上看到的这个 这种它的电流是马上降下来 那这部分电流我们怎么去理解呢 这个是一个把一个开关的电流分解成 它的电容电流 输出电容 Coss 电流再加上通道电流 那这个的话我们可以看成是 一个 LLC 电路关断电路 那再把它分成四个阶段 第一 第二 第三和第四 第一个阶段的话 它是一个电流通过通道续流的阶段 相当于是这个电流是通过这个电感 通过电容 然后通过 S1 的 Drain 流到 S1 的 Source 当你这个 S1 关掉之后 那比如说第二阶段 它是从它的 plat node 降到了它的 switchnode 那这一部分过程当中 它的通道的电流肯定是降到零了 从 IM 降到 0 那由于这个栅极驱动它特别的强 那 Miller 到这个 switchnode 的区间 就会变的非常的短 这一部分就是你的负载电流减去通道电流 就变到了 Coss 的电流 Coss 电流就是我们看到的这个 ID_Coss 那 Coss 电流的话因为这个时候 它的负载电流是不变的 这部分 Coss 电流 它没有引起足够高的 Drain to Source 的变化 这个是蓝色的曲线在下面 因为在低压的时候 输出电容它的电容非常大 是纳法级的 所以这个时候你从 0 到 IM 再增加这个很快的过程当中 漏极到源极的电压基本上增加的非常的小 那当第二个阶段结束之后到第三个阶段 你的整个通道电流已经关断了 然后你的激磁电感的电流 再给 Coss1 和Coss2 放电和充电 那这部分电流就第三个阶段这部分电流 就相当于是这两个电容电压是已经升高到一部分 那这两个电容都会是并联 然后充放电结束这个关断的过程 第四个阶段就是你 S1 充电超过母线电压 使得 S2 的体二极管导通 在第二阶段这部分因为时间非常的短 因为你栅极驱动非常的强 它从 Coss 上的电流从 0 到 Im 增加 使得这个 Vds_s1 电压增长的非常慢 电压非常低的时候 它电容是非常大的 所以在这个阶段是 Coss1 是起主导作用 所以在这段时间之内你的负载电流 我们就可以认为它全部流向了 Coss1 这部分电压和电流交叠是实际的关断损耗 其它的这种交叠 比如说第三阶段的电压和这个 Coss 的交叠 这部分能量存储到这个 Coss 上面了 这部分能量的话 在下一个软开关的时候能够被释放到负载 它这部分能量是不算 所以实际的关断的损耗是要非常小 这部分能量是被 Recovered 到开通 但是我们由于这个非线性电容 它在电压上升的过程当中 它的电容变小它的 dv/dt 就会变高 那 dv/dt 和 di/dt 在高的时候 会引起电路的振荡 在高的 dV/dt 的情况下面 它在电路里面会对系统产生哪样的影响呢 这个是一个把栅极上管和下管 驱动器内部电路画出来 包括它的一些外围电路 当你的 switchnode 看到 这个 dv/dt 的过程当中 高的 dv/dt 的过程当中 它会通过一些寄生的电容 这个寄生的电容包括 这个 Level Shift 原副边的电容 包括这个自举二极管的结电容 通过原边的电路一直耦合到 你的系统的功率地 那这部分的噪音就会产生大的噪声 就像下面这个波形 它的蓝色的显示它的输入 它的紫色的显示它的输出 你可以看到输出 在有些脉冲是没有输出的 输出的就会出现丢波 这个就是因为你原边的噪音 大到一定程度的时候 会产生了使得这个驱动器它不正常工作 看到这个 dv/dt 我们也可以看看 这个 MOS 管和氮化镓器件 dv/dt 的一些差别 那我们可以看到 dv/dt 氮化镓的宽禁带器件 是 MOS 管的超过三倍以上 然后它的这个 di/dt 是 SJ-MOSFET 的超过十倍 所以随着宽禁带器件不断的发展 对驱动器的 dv/dt 的要求越来越高 对整个电路系统的设计也要求比以前更严格 那怎么去设计这个上管和下管隔离 上管和下管驱动器它的能够 使它能够抗 dv/dt 能力更高呢 那我们这个里面就做出了一些解释 就说在 27714 当中我们在低压侧 有这个原边和副边的 Level Shift 这样的话我们原副边就会产生两个地 一个信号地 一个是功率地 通过这个驱动器内部 Level Shift 电路 把这两个分开 那这两个分开之后 我们在把二极管左侧加一个蓝色 这个蓝色的线 大电容 使得它开关噪音在这个小的 loop 里面 能够通过 PCB 的 layout 让它形成一个很小的 loop 回到功率地 然后在原边和副边整个的 这个自举的充电的过程当中加一些电容和电阻 我们就可以看到就是 这一部分 dv/dt 所产生的噪声 它被限制在功率地 使得它信号地相对就比较干净 噪声小使得这个问题解决掉 所以 27714 在处理 dv/dt 的过程当中 也是做了专门的内部电路设计 那讨论完了 dv/dt 然后另外一部分就是这个 di/dt 我们知道这个 di/dt 的变化如果过快的话 它从这个 switchnode 到地 在开关管关断的时候 开关管关断的 上管关断的时候电流下降 然后下管的电流在上升 这部分的话就是因为负载电流 在这个时候就是 assume 假设它是不变的 因为开关的瞬间时间是非常短 在几百纳秒 电感的电流在这个时候是变化是非常微小的 那我们可以看到当这个电流 它在往上增加的时候 电感引起的反向电压 就使得 switch node 的电压低于这个地的电压 电压低到一定程度之后就会产生 Driver malfunction 为了针对这个功能 那 UCC27714它的这个负向瞬态安全工作区 就做了合理的优化 比如在200纳秒的时候它可以承受-30V 如果是100纳秒它可以承受-70V 的电压 所以使得栅极上管和下管驱动器 更加的抗干扰能力增强 然后 TIDA-01159 这个是一个 TI 给的参考设计 它是针对我们刚开始讲的 UCC21520和 SN6505 设计的一个小的单元模块 包括电源 包括隔离驱动器形成的一个驱动半桥的 EVM 所以详细的信息可以在 TI.com 搜索 TIDA-01159 获取详细的信息 这边我们给出一个总结 所以我们这个里面讲到了 Gate Driver 栅极驱动器的应用 讲了一些基本的一些参数的了解 讨论到低压侧高压侧和低压侧 还有包括隔离驱动 除此之外我们深入的讨论了寄生参数 软开关 硬开关 非线性电容 以及 dv/dt di/dt 所产生的噪声 和怎么通过 PCB 的解决 和选取合理的 Gate driver 去避免这些问题 作了深入的探讨 详细的信息也在 TIDA 当中 给出了一些案例 那非常感谢大家花时间来参加这个培训 如果有什么问题请及时的做出反馈 谢谢大家
大家好 我叫张巍
在 TI 担任系统工程师
今天我们来讨论一下熟练掌握
高压 MOSFET 和 IGBT 栅极驱动器设计
Mastering the Art and Fundamentals of
High Voltage Gate Driver
我们在这堂培训课程当中会学到什么呢
我们会了解一下栅极驱动器的应用领域
什么是低压侧驱动
什么是高压侧和低压侧驱动
什么是隔离驱动以及如何优化驱动器设计
包括电路的集成参数 软开关和硬开关
高的 dv/dt 和 di/dt
以及隔离驱动
我们涉及到的一些芯片包含
UCC2751x 2752x UCC27x24 低压侧驱动
UCC2771x 是 600V 的高压侧和低压侧驱动
以及 UCC2152x UCC2122x 和 UCC53x
是隔离驱动
TI 的一些参考设计
包括 TIDA-01160 TIDA-01159 PMP20873
涉及到的一些应用的场合包括
UPS 通信 Server 还有 Solar motor drive
我们先来讨论一下栅极驱动器的应用领域
完了之后我们会从特别基础的了解
低压侧驱动 高压侧和低压侧驱动
以及隔离驱动
在了解了基本的常识之后
我们会深入探讨在系统的
电力电子系统当中如何设计优化栅极驱动器
最后我们会给出一些 TI 的一些设计参考
我们先来看栅极驱动器它的一些应用领域
它的应用领域非常广
包括锂电池充电
包括笔记本和手机的充电器
Server/Telecom/UPS
也包括 Electric Vehicles 还有 Class D 或者 Class E Audio
包括马达驱动 新能源 太阳能光伏
也包括 led 的驱动
Solid State Lighting
总之栅极驱动器它是应用于每一个
MOSFET IGBT
这些功率器件也包括最新的宽禁带器件
比如 GaN 氮化镓
SiC 和碳化硅器件
在 Server 和 Telecom 这个应用当中
我们这边给了一张图
输入的话是 85V 到 265V AC
经过 EMI Filter 到 PFC
PFC 的输出基本上是 400V 的母线
然后 400V 到 48V 是
对这种带电池的 Teleccom
或者直接到 12V Server
这个里面我们给了一个电路的拓扑
包括原边的 PFC 和基于 LC 的
400V 到 48V 的系统
然后同步整流有桥式同步整流
也有这种全波整流
对 PFC 的话也有现在
我们宽禁带器件没有反向恢复
使得 Totem Pole PFC 在现在的
高效率高功率密度当中颇为广泛
粉色区域我们现在 high light 的都是
单个通道或者双通道的低压侧驱动
低压侧驱动就主要是指
它都是基于一个参考地
然后我们也有高压侧和低压侧驱动
就比如这种全桥电路上管和下管
100V 200V 是针对 48V 的母线
600V 是针对 400V 的母线
我们也有 Isolated gate driver
就是在所有的系统当中
不管是低压侧驱动还是高压侧和低压侧驱动
隔离驱动它作为现在越来越广泛的驱动形式
在任何的驱动场合当中都能够找得到
另外一个场合的话
我们这边给出的就是 Electric Vehicles
像电动汽车 新能源和马达驱动
我们下面给的这个拓扑的话就是
一个双向的太阳能汽车充电和电网连接
400V 的母线到输出是一个宽范围 200 到 400V
或者用于给汽车电池充电
或者是给太阳能板子把电量能够送回到电网
400V 也可以用于一些家电
白色家电设备 变频空调 变频电冰箱
还有一些其它的马达驱动和手动工具
这个也可以是 48V 的电池
也可以是 20V 的电池
当然其它一些马达驱动
包括 traction motor drive
就是汽车的牵引马达设计
还有像内部的 internal belt driven generator
它都是基于三相三个半桥
三相六个 switch 六个管子
来组成的马达驱动电路
对于每一个 MOSFET 来讲
在 100V 场合 200V 场合
或者 600V 场合或者是隔离驱动
都能够找到它应用的领域
我们都有哪些功率元器件
需要栅极驱动去驱动呢
我们这边给了几个例子
第一个就是 Si-MOSFET 就是基于我们
基于硅的传统的 MOSFET
它的电压一般在 20V 到 650V
还有 IGBT
一般 IGBT 都是 650V 场合以上
针对的功率设计都在三千瓦以上甚至更高
还有碳化硅的 MOSFET
它是电压范围基本在 650V 以上
而且还有 Nom-ON 和 Nom-OFF 的
宽禁带氮化镓器件
这些的话基本上是在 650V
或者是 100V 场合
每一个器件的驱动的电压范围不一样
像硅就是 12V 左右
IGBT 是 15V
碳化硅的话对不同的厂家不一样
有些是 15V
有些是 20V
氮化镓的话
有一些是 Si-MOS cascode 结构
它是 10V 去驱动
然后有一些是 Nom-OFF enhancement mode
它是 5V 驱动
关断的话
根据这个噪音的场合不一样
噪音大的会用负电压去关断
比如 IGBT 它会到 -8V
SiC 到 -5V
然后 GaN 的话 -3V
它的一些电流电压曲线
就 I-V curve 我们也可以看到
针对 SiC 来讲 10V 就是够用了
IGBT 的话是超过12V 是好的
SiC-MOSFET 的话它的范围比较宽
一般 20V 的是一个比较优化的性能
氮化镓器件的话它的最大电压是 6V
但是 5V 或者 5.5V 就能够比较好的开通
氮化镓器件使得它的 RDS(ON)
通态电阻达到一个比较理想的水平
针对比较早的传统的栅极驱动电路
一般都是采用离散的元器件
它的输入的话是
控制器出来 3.3V 或者 5V 的信号
通过这个 Level Shift 电平转移 move up
就是把它电平能够转移到高一点去驱动
PNP NPN 的 Totem Pole
然后通过它的放大输出
再接到 MOS 管的栅极驱动
它输入是 3.3V 或者 5V 输出是 12V
它有电压和电流的放大
但是我们可以看到
在一个单路栅极驱动
它这个里面包括超过数十个器件
然后我们现大在家通常都采用的
是一个集成的单路 MOS 管栅极驱动
它可以去降低这个
BoM component 器件的总数量
可以减小 PCB 的这个面积
而且它也有带有一些其它的一些保护功能
比如说它有欠压保护
比如说它有输入的最小脉宽要求
当然把很多元器件集成之后
也可以增加它的一些可靠性能
哪一些低压侧的驱动是我们应该去选的呢
第一个我们要看的就是你是单路还是双路
比如说 你是一个单向的 PFC
那你一个单路就够了
如果是一个两相 interleave PFC
你可能会选一个 UCC2752x
它是一个双路
然后 UCC2751x
它分为两个输入
你可以是正向输入
你也可以是反向输入
就看你的逻辑是正还是反
而且双路驱动里面它也有反向驱动
2751x 系列它也包含
输出的上拉和下拉是两个分开的 pin
这样的话你就可以去调整
开通的速度和关断的速度
使得实现系统完整的性能更加优化
这个半桥驱动它是怎么工作的呢
半桥驱动里面的下管
其实就是一个低压侧驱动
你输入的话是一个控制器
输出的话是 MOS 管的话就是 12V 10V
如果说是低压的 MOS 可能会到 5V
那高压侧的呢
高压侧的话
因为这个输出的 ground 地的这个参考
它是这个 switch node
我们这个点叫 HS
这个 HS 的话
HS 它是根据开关管的开通或者关断
它是在零和母线电压来回跳动
那在这个跳动的电压过程当中
你就要实现信号的 Level Shift
或者是隔离
比如说你原边的信号是基于这个信号的地
但是你的输出是 HS
你怎么能够把这个信号
从低压侧传输到高压侧呢
这个在半导体的集成工艺当中
它就有电路叫 Level Shift
它通过低压去控制高压的管子
把信号传输到高压侧
在信号的隔离之外
而且你得需要提供电源
因为在开通的时候你必须保证
有 10V 的电压加在上管的这个栅极上面
我们可以看到在正常工作的时候
高压侧的输入信号它是针对于信号地的
但是高压侧的输出信号
它是在母线电压以上
就是如果说母线是 100V 那就是 100V
如果说母线是 700V
那就是基于 700V 的电压
那你的 HO 电压就是在这个 700V 之上
再加一个 10V 的驱动或者 5V 或者 12V
对于一些低压 100V 的场合
很多的驱动它都把这个自举的
这个二极管 DBoot
集成到这个芯片里面
你 100V 的二极管的性能
要比高压 700V 的二极管的性能会好很多
所以 100V 栅极驱动器
集成自举二极管的概率比较大
在高压 600V 到 700V 的场合
自举二极管一般都采用外加的 discrete
就是分散元器件
所以针对这种 100V 到 700V 的应用场合
TI 的话它是有 UCC27714是 600V
UCC27201是 100V
UCC27712 是 600V 它是一个
这些都是双通道 27800
所以它都是双通道上管和下管
除了我们刚才讲的这些基本的电路之外
在输入侧如果说它的 PCB 的 layout 距离比较长
会加一些 RC 的滤波
然后再输出侧的话
根据开通和关断
它可以加一个反并联二极管使它的关断更慢
加开通电阻使得它开通的 di/dt
引起的这种过冲 dv
还有它的 overshoot
电压的过冲会小一些
当我们选这个栅极驱动芯片的时候
有哪些参数需要注意呢
第一个就是静态参数
静态参数里面
它基于这种供电电压和它的欠压保护
这个是我们第一个要看的
比如说氮化镓器件它就是 7V 到 14V
7V 是这个是 100V 的上下管驱动
然后5114是低压侧驱动
20V 到 25V 是 UCC2771x
或者是 UCC27201x
针对这种 MOS 管和 IGBT 的驱动
35V 的话一般都是 GaN 的 MOSFET
因为它的工作电压是 0 到 20V
如果加负压的话是 -5V 到的 20V
那就是 25V
它需要一些其它的余额
35V 是一个比较合理的供电最高电压
另外一个的话就是它的驱动电流
驱动电流直接是和你的
驱动的这功率管的大小
电流的大小
比如说
你是 10 安培的 MOSFET
或者是 100 安培的 MOSFET
它的栅极的电容
需要的这个驱动电流能力是不一样
对这种驱动电流的话
一般有对称的和不对称
如果对称的话
就是说你的开通上拉电流
和关断下拉电流它是一样的
比如说都是 4 安 27714
或者是27201是3安
它也有这种不对称
就是你开通的时候要比关断的时候小一些
这个是主要是针对于开通的时候
它是由反向恢复电流引起的
这种过冲或者是下拉
来减缓它开通引起的这种噪音
然后关断的话对 MOS 管来讲
它的输出电容是一个自然的一个 Snubber
所以它关断的时候
你越大的电流产生的这个问题
就不包括反向恢复
所以它关断的时候大的电流可以使得
它的关断的 lose 损耗减小
第三个就是输入的逻辑电平类型
第一种就是 TTL 和 CMOS Compatible
就是你是 TTL 电平 CMOS 电平都是兼用
这种的话一般都是用于输入数字控制器
它的输出的话是 3.3V
那在这种场合
一般都会选择 TTL 或者 CMOS Compatible
但如果说这个输入是另外一种类型
是 CMOS 的话
它一般开通电压是供电电压的百分之五十五
就是说你如果要满足完整开通
一般输入电平的设计需要
高于电源的百分之七十
就是 0.7 倍的 VDD
还有一个就是高压侧和低压侧驱动
它的 Boot 电压 自举的电压
那如果是 100V 那你就需要选择
比如说 UCC272xx系列
它的 Boot 电压是100
加上它的上管驱动电压
就是 100V 再加 20V
还有600V 的电压再加 20V 620V
另外一种类型就是动态参数
动态参数就是第一个就是传输延时
第二个就是上升时间和关断时间
就是这个是反映了驱动器驱动电流的大小
还有传输延迟的这种匹配
比如说你上管和下管在同时开通的时候
这两个的一致性如何
还有就是输入的最小带宽
如果说你 1 纳秒的噪音
都能够让你的输出打开的话
这可能对电力电子噪音比较多的系统里面
它不是推荐的
比如说 如果说出现 5 纳秒的噪音
我希望这个栅极驱动器能够把它屏蔽掉
最后一类重要的要考虑的就是它的封装
封装的话对功率密度要求比较高的
比如说 WSON-6 2x2 的封装
也有 3x3 的 SOT-23
还有普通的这种 SOIC 的封装
或者是 SO-PwrPad
或者 TSSOP
TI 是提供
这些封装都在我们的这个产品的
这个系列里面都有
客户可以根据你自己对自己的场合
到底是贴片的
还是直插的
还是有立的
还是说没有 pin 脚的
可以根据这些要求来选择合理的封装
除了我们刚才讨论的一些基本参数之外
另外一个要求就是
你这个栅极驱动器需不需要隔离
在一个电子电子系统当中
如果说是和电网连接
电网连接就有雷击
为了能够保证人员的安全
它在功率部分都需要设计隔离
就是比如说 400V 到 12V
它这一级有一级隔离
那这一级隔离的话
它不但能够起到
比如说电压通过变比把高压变到低压的作用
而且能够防止在电网侧出现雷击
然后在 load 负载这一侧
人们不受到雷击这种高压的这种危害
在功率电路之外
另外一个就是你在控制电路也需要隔离
否则这个电路就不是隔离
下面这个里面来讲
就是说你的输出侧
在副边有反馈 原边需要驱动
然后这个在整个的控制电路当中也要做隔离
那控制电路当中做隔离
你可以通过光耦做反馈
然后通过驱动高压侧和低压侧来做驱动
你也可以通过隔离变压器
把信号传输到原边
你也可以通过隔离的栅极驱动器
来驱动原边的 MOS 管
对于这种不同的要求
比如说你的输入电压不一样
对于这种基本隔离和加强隔离的隔离等级
在 IEC 的标准 UL 和 BDE 的标准当中
都有详细的描述
所以客户可以根据这种终端系统里面
系统的设计要求
选择隔离等级到底是
基本隔离还是加强隔离
要实现隔离驱动
我们这个里面先讲两种
我们现在常用的第一个就是
通过隔离变压器
就是我们这边说的 TYPE A
那隔离变压器它从 controller 控制器
拿到信号之后先必须经过一级放大
把它的电压和电流都能够放大
放大之后它到变压器的原边
然后副边经过两路信号送到我们的半桥
另外 TYPE B 就是我们可以先用
数字隔离器把信号从原边传到副边
然后再通过高压侧和低压侧
或者是用上侧驱动用自举电路
来实现高压侧和低压侧的半桥驱动
这两种办法各有优缺点
基于这种隔离变压器的栅极驱动设计
它的优点就是它的传输延时比较小
所以单纯靠看这个低压侧驱动
再加上变压器驱动
如果说考虑这个其它的电阻电容的话
它一般在 20 纳秒左右
而且它不需要高压侧的这个电源去设计
因为变压器它不但能够传输信号
而且能够传输 power
就是传输它的瞬间需要的开通电流
然后对这两点来讲的话
这个 TYPE B 的话
它的传输延时
因为它需要高压侧和低压侧的 Level Shift
所以 Level Shift 它防止噪音
它就需要加一些
需要一定的时间来去甄别
所以它的驱动的延时相对来说会大一些
而且它是需要这种副边的供电
就比如说你这个数字隔离器的副边
它是需要这种
比如说你 12V 加个 LDO 再给它供电
这个和原边的电路是不共地的电源
但是如果说我们把这个整个电路
如果考虑齐全
为了保证信号的完整性
隔离驱动器它不是像我们刚才那样的
实际的电路当中
它会加一些其它的离散元器件
二极管 稳压管 电阻 三极管
来使得它的开通和关断
能够达到比较理想的状态
那这样一比的话
我们就会看到它的 TYPE A 的一些劣势
就比如说原副边这种耦合电容
通过变压器要耦合的非常好的时候
它这个原副边的这种耦合电容
一般都会超过 10pF
它的这些寄生参数
因为是变压器寄生电感
再加上很多离散元器件它的寄生参数
还有带来的一些过冲
还有它整个的一些尺寸 这些体积
都是这个隔离驱动变压器的一些缺点
那在这方面的话
TYPE B 基于这种数字隔离器
和上下管隔离器相匹配的系统
它就体现出了优势
原副边电容小于 1pF
寄生参数小 体积小
整个 PCB layout 做的也比较容易
然后它的尺寸也比较小
如果说我们单纯把这个需要的这些元器件
主要的元器件列下来
比如说我们在 TYPE A 和 TYPE B
作一个对比的话
我们就可以看到 TYPE A
如果要实现加强隔离
它的这个变压器体积非常的大
然后 TYPE B 的话
它都是就是一个数字隔离器
再加一个原副边的上管和下管的栅极驱动器
相对这两个的 PCB 的面积
它是减小了将近一半
然后体积减小的非常多
然后另外一种类型
就是把这个数字隔离器和上管和下管的隔离
它做成一个芯片
这个芯片的话
我们就叫做隔离栅极驱动器
它的这个 CMTI 的要求一般会性能就比较好
超过 100 伏每纳秒
它可以做到 5kV 的加强隔离
传输延时从原来的一百纳秒
降低到十九二十纳秒左右
然后它的这个通道的一致性
它的信号的畸变都是小于 5 个纳秒
而且这个办法它的 PCB 的面积是
又是 TYPE B 的一半
所以我们整个来看从 TYPE A
到 TYPE B 到 TYPE C
它的 PCB 面积减小超过了百分之七十
所以我们可以看到 A B C
在整个栅极驱动器里面的优点和缺点
UCC21520 隔离栅极驱动
就是我们 TI 2016年
刚好上市的一个双路隔离驱动
它的这个瞬态共模抑制参数是 100 伏每纳秒
minimum 就是最小值
然后它是 TI 我们第一款设计的隔离驱动
它也有些简单的保护功能
包括死区设置 欠压
还有它一些比较好的动态性能
它可以被用作两路低压侧同步整流驱动
也可以是一个半桥驱动
也可以作为两个高压侧驱动
所以它的设计是非常的方便
栅极驱动器设计它有输入
输出跟随输入实现相应的逻辑
对电压和电流进行放大
这个看似是一个非常简单的一个应用设计
但是它真的就那么简单吗
然后我们在下面这个我们培训过程当中
我们会详细介绍在驱动器设计
考虑寄生参数
考虑软开关硬开关
考虑大电流的驱动
针对 MOS 管的非线性电容
考虑这个 CMTI dv/dt
还有它的寄生的电感和电容
怎么能够实现原边和副边
信号地和功率地的分离
然后如何设计它的 power supply
进行一些详细的分析
所以我们下面是深入的去介绍
在整个的栅极驱动设计过程当中
我们怎么去优化
怎么去增强它的可靠性
怎么去减小它的损耗
首先我们去看一看在整个驱动电路当中
它有哪些寄生参数呢
首先就是这个我们要看的 MOS 管
以 MOS 管为例
它有它的寄生电容
输入电容是它的栅极???
CGS 加上 Miller cape CGD
它的 reverse cape 是CGD
它的输出电容是 CGD 再加上 CDS
在驱动芯片当中它内部有 wire bond
然后 PCB 这个是绿颜色的
它也会引起这种寄生电感
然后开通和关断的过程当中
它不是一个一阶系统
它是一个比较复杂的二阶
甚至更高阶的系统
它会有产生振荡
另外一个寄生参数就是
MOS 管的体二极管
这个二极管是 MOSFET 寄生二极管
这个二极管的特性是很难被优化
或者是你优化的这个二极管
其它的性能就得损失
所以这个二极管它不是
一个单独设计出来的二极管
它是一个 MOS 管的寄生体二极管
它作为一个寄生参数
在系统的应用当中也有很多考量
我们来看开通的这个过程
开通的过程的话就是
你先栅极超过开关点 电流增加
然后在 Miller 区间之内电压减小
完了之后电压再升高减小它 RDS(ON)
它的一些简化电路我们在
从 t0 刻到 t2 时刻
t2 到 t3 t3 到 t4
我们可以看到整个驱动器
它是针对哪一部分电流进行工作
从 t1 到 t3 是电流和电压它相互交叠的部分
它的积分就是乘积就是它的 power
它的损耗的 power
然后它的积分乘以它的频率就是它的损耗
然后我们可以看到你这个 t1 到 t3 的时间越长
你的损耗就越大
那怎么能够减小t1到t3这个时刻的时间段呢
那就是我们比较直观的办法
就是在栅极驱动的它的输出的电流
上拉电流能够把它增大
电流越大 t1 到 t2 时刻时间就越短
你的损耗就越小
关断可以作为开通的一个镜像
我们这边就不重复解释了
如果说考虑上管和下管
考虑这种体二极管或者是反向并联二极管
它的这个开通特性又有哪些不一样呢
首先我们可以看一看
左上角画的二极管的反向恢复
二极管的反向恢复这个是
我们教科书上给到的波形
它的正相电流在关断的时候
首先电流下降 有反过冲
然后再承受它的电压 VF
那把这个电压叠加到我们上一页讲的
这个开通的过程当中就可以看到
它在上管开通的时候
它有一个 overshoot 电流的一个过冲
那这个过冲就是反向恢复引起的
下管的反向恢复二极管引起的
然后这个里面就是我们作了个比较合理的假设
就是输出电感的电流是不变的
那我们可以看到体二极管
或者是反并联二极管引起的反向恢复
使得它的开通的损耗增大
对于这种超级结 SuperJunction MOSFET
它的这个二极管是一个体二极管
寄生二极管
对于 IGBT 它的二极管是一个反并联的二极管
那这个反并联的二极管是经过优化设计的
是一个快恢复二极管
那在整个的这个实验波形当中我们可以看到
对十安培开通 MOS 管它的反向恢复电流
可以冲到六七十安
超过五倍的负载电流
那 IGBT 的开通电流比如说是二十安
那它的反向恢复电流在这个时刻
它的峰值电流就只有十安
加上它的负载二十安
它就冲到三十安
所以我们可以看到 IGBT
它优化过的体二极管性能是要比
SuperJunction MOS 管的体二极管
寄生二极管的性能要好很多
针对这种反向恢复电流大的 di/dt
所引起的这种过冲
它就会反应到这个输入 Gate
就是栅极驱动上面
可以引起很大的振荡
这个振荡我们是要尝试去避免
它不但会引起这种电路的损耗
而且会使得它的过冲或者是下拉
会伤及到这个 MOS 管栅极驱动器的
这个可靠性
它会超过它的 spike
会引起内部的一些电路的损害
甚至使得输出的逻辑产生错误
然后考虑到这个寄生参数
一个比较可调的办法就是增加它的开通电阻
我们这边给了一张图
那就是通过增加它的驱动电阻
从 2 欧姆到 20 欧姆
可以看到它的 MOS 管的反向恢复电流
它的峰值电流它是有下降的
比如说
你在负载电流是 4 安的时候
它是从 50 安能够降到 40 安
还有百分之二十的优化
但是它的优化是有限度的
所以就是因为它的体的
寄生二极管性能是非常的差
所以考虑寄生二极管
加上它的这个寄生电感寄生电容
所产生的噪声
产生的这种噪音对系统是
必须要认真 合理的去考虑
如果说开通的电阻比较大
可以加反并联二极管
也可以选取那种上拉下拉是分开的栅极驱动器
那这样的话就可以节省一个
分散 离散的元器件二极管
考虑到刚才我们的硬开关和一些寄生参数
所带来的噪音
那另外一部分我们通过可以避免的就是软开关
软开关的话就是使得它的二极管不要导通电流
然后使得它的这 个switch node 电压能够降到 0
比如说 Totem pole PFC
它这个里面的作临界电流模式 transition mode
那通过电流一点点的过零
可以使得 switch node 电压从母线电压降到 0
然后再开通
然后另外一部分电流
现在比较流行的就是 LLC 软开关电路
它的电路是通过 Magnetic inductance
就是激磁电感在死区期间
对半桥的上管和下管的电容
进行充放电来实现软开关
在软开关的电路当中和硬开关的电路当中
栅极驱动器有哪些不一样呢
我们左边是我们讲的软开关的
左边是我们讲的硬开关的电路
右边的话就是软开关
那软开关就是你在开通之前
它的 Drain to Source 的电压已经降到了 0
它的体二极管已经打开
那这个时候你可以看得到
它的这个输入栅极驱动信号
它就没有米勒平台
它就直接是一个从 0 到高的一个过程
这个过程的话就是相当于是
它的输入电容 CGD 加 CGS 两个并联
从0一直驱动到它的最终的电源 VDD 电压
它的工作状态是从原来的两个状态
然后变成现在的一个状态
然后我们可以看到电压和电流
它是没有交叠 没有损耗
而且这个里面负载这个电流
就是 ID 这个电流
这个电流增加是由系统的电感来产生的
而不是它由它的负载电流
或者寄生参数来产生了一个非常大的 di/dt
所以它的 di/dt Current Slope 电流这个斜率
它是由电感来决定
那我们就知道电感电流它不会瞬间发生变化
它的 di/dt 就小了非常多
因此它还会优化系统的噪声
那我们来看一看
在软开关的电路当中
它是怎么样的一个驱动损耗呢
那我们左上角这张图是给出了
硬开关电路栅极驱动
再加上这个横坐标是它的栅极的电荷
这个是硬开关的波形
那如果是软开关驱动到 10V
那考虑到之前我们讨论过的
你开通和关断它的整个的这个损耗的计算
就是你的电压乘上你的驱动电荷 QG
所以它是这个方形的面积
长方形的面积
它是硬开关的 ON 加上硬开关的 OFF
如果是软开关的话
因为我们可以考虑它没有米勒平台
它就是输入电容 CGD 加上 CGS 两个并联
这个它的斜率就是跟随第三段线的斜率
它在 10V 以内
它开通的面积和 10V 硬开关关断的面积
它这两个加起来是软开关电路里面的损耗
我们可以看到这个软开关的损耗 QG_ZVS
它是要比硬开关的损耗是要小的
就是在软开关的电路当中
它不但没有二极管
寄生二极管引起的这个损耗
和硬开关的电压和电流的交叠
它也会减小栅极驱动器所需要的能量
那在讨论的这个软开关开通关断的过程当中
你选取一个比如说一百毫安的驱动器
和1安培或者是5安培的栅极驱动器
它在关断的过程当中有什么不一样呢
我们左边是一个选取的是相对来说
电流比较小的一个驱动器
然后如果说你选择一个大电流的驱动器
它的这个开关损耗是怎么样的一个过程呢
如果说在普通的半桥
然后中间 switch node 加电感
在大电流驱动器关断的时候
这个它的电压电流的变化
它不是
不由你原边的这个
像我们左边的这个曲线它有米勒平台
电压变化和电流变化
因为你的大的驱动电流
会使得你的漏极电流非常快的下降
如果说你能够考虑到你的寄生参数
比如说你在 0V 的时候
这个 MOS 管的 Coss 是6纳法
然后你在 400V 的时候它是小于30皮法
这个相当于差了两百倍
那这个非线性特性在实际的大电流驱动下
它的波形我们这边给出了一个简易的波形
我们就可以看得出它在电流非常大的时候
从负载电流慢慢下降的时候
就是这一段它的电压上来的是非常慢
因为在低压的时候它的电容非常大
它的电容非常大
那它产生的这个斜率就比较小
当它电流下降快
电流电压慢慢上升的时候
它这个电容就会变小
它的斜率就会增加
这个时候它的电流下降也快了起来
所以在大电流驱动考虑非线性电容
它的关断损耗实际上是非常小
而且这个关断的这个电压的变化
它不是你的 Gate 的电流来控制的
而是由你的负载电流
在低压的时候 Coss 它还是一个
就像一个自然的一个 Snubber
它能够让你的 dv/dt 变化非常快
那在高压的时候的你的电容非常小
你的电压变化非常快
所以你的损耗会变小
但是这个大的这个 dv/dt
就使得你的系统里面会产生一些 Cdv/dt
还有 Ldi/dt 所引起的振荡
然后我们这一页给出了
大电流关断下面电压和电流的波形
所以我们这边看到的那个粉色线是它的
开通关断电压就是驱动电压
然后中间的绿色的波形是它的开关的电流
然后蓝色的是它的 Drain to Source 的电压
如果说把这个关断的过程能够放大
你可以看得出来
它的这个电压初始上升是非常慢的
然后当它的电压上升到一定程度的时候
它的电压才 dv/dt 才会变化
这个时候我们可以看到
它其实是一个 5 伏每纳秒
就是我们从左边的 100 伏每纳秒
Zoom IN 就是放大到 5 伏每一个
我们可以看到这个时候
电流在下降的过程当中
电力电压在很快的上升
有趣的是我们可以观察一下
这个 Gate 都已经完全降到了 0 了
但是电流还没有降到 0
那这个电流是我们实际测到的这个开关的电流
这个电流从外部去测量去看
它是一个就是 MOS 管的内部的通道的电流
和它寄生电容电流的和
那我们这个和
这两个加起来之和是我们现在看到这个绿色的
那绿色的在 Gate 栅极电压降到零之后
这个电流在这一瞬间
它是没有像我们课本上看到的这个
这种它的电流是马上降下来
那这部分电流我们怎么去理解呢
这个是一个把一个开关的电流分解成
它的电容电流
输出电容 Coss 电流再加上通道电流
那这个的话我们可以看成是
一个 LLC 电路关断电路
那再把它分成四个阶段
第一 第二 第三和第四
第一个阶段的话
它是一个电流通过通道续流的阶段
相当于是这个电流是通过这个电感
通过电容
然后通过 S1 的 Drain 流到 S1 的 Source
当你这个 S1 关掉之后
那比如说第二阶段
它是从它的 plat node 降到了它的 switchnode
那这一部分过程当中
它的通道的电流肯定是降到零了
从 IM 降到 0
那由于这个栅极驱动它特别的强
那 Miller 到这个 switchnode 的区间
就会变的非常的短
这一部分就是你的负载电流减去通道电流
就变到了 Coss 的电流
Coss 电流就是我们看到的这个 ID_Coss
那 Coss 电流的话因为这个时候
它的负载电流是不变的
这部分 Coss 电流
它没有引起足够高的 Drain to Source 的变化
这个是蓝色的曲线在下面
因为在低压的时候
输出电容它的电容非常大
是纳法级的
所以这个时候你从 0 到 IM
再增加这个很快的过程当中
漏极到源极的电压基本上增加的非常的小
那当第二个阶段结束之后到第三个阶段
你的整个通道电流已经关断了
然后你的激磁电感的电流
再给 Coss1 和Coss2 放电和充电
那这部分电流就第三个阶段这部分电流
就相当于是这两个电容电压是已经升高到一部分
那这两个电容都会是并联
然后充放电结束这个关断的过程
第四个阶段就是你 S1 充电超过母线电压
使得 S2 的体二极管导通
在第二阶段这部分因为时间非常的短
因为你栅极驱动非常的强
它从 Coss 上的电流从 0 到 Im 增加
使得这个 Vds_s1 电压增长的非常慢
电压非常低的时候
它电容是非常大的
所以在这个阶段是 Coss1 是起主导作用
所以在这段时间之内你的负载电流
我们就可以认为它全部流向了 Coss1
这部分电压和电流交叠是实际的关断损耗
其它的这种交叠
比如说第三阶段的电压和这个 Coss 的交叠
这部分能量存储到这个 Coss 上面了
这部分能量的话
在下一个软开关的时候能够被释放到负载
它这部分能量是不算
所以实际的关断的损耗是要非常小
这部分能量是被 Recovered 到开通
但是我们由于这个非线性电容
它在电压上升的过程当中
它的电容变小它的 dv/dt 就会变高
那 dv/dt 和 di/dt 在高的时候
会引起电路的振荡
在高的 dV/dt 的情况下面
它在电路里面会对系统产生哪样的影响呢
这个是一个把栅极上管和下管
驱动器内部电路画出来
包括它的一些外围电路
当你的 switchnode 看到
这个 dv/dt 的过程当中
高的 dv/dt 的过程当中
它会通过一些寄生的电容
这个寄生的电容包括
这个 Level Shift 原副边的电容
包括这个自举二极管的结电容
通过原边的电路一直耦合到
你的系统的功率地
那这部分的噪音就会产生大的噪声
就像下面这个波形
它的蓝色的显示它的输入
它的紫色的显示它的输出
你可以看到输出
在有些脉冲是没有输出的
输出的就会出现丢波
这个就是因为你原边的噪音
大到一定程度的时候
会产生了使得这个驱动器它不正常工作
看到这个 dv/dt 我们也可以看看
这个 MOS 管和氮化镓器件 dv/dt 的一些差别
那我们可以看到 dv/dt 氮化镓的宽禁带器件
是 MOS 管的超过三倍以上
然后它的这个 di/dt 是
SJ-MOSFET 的超过十倍
所以随着宽禁带器件不断的发展
对驱动器的 dv/dt 的要求越来越高
对整个电路系统的设计也要求比以前更严格
那怎么去设计这个上管和下管隔离
上管和下管驱动器它的能够
使它能够抗 dv/dt 能力更高呢
那我们这个里面就做出了一些解释
就说在 27714 当中我们在低压侧
有这个原边和副边的 Level Shift
这样的话我们原副边就会产生两个地
一个信号地 一个是功率地
通过这个驱动器内部 Level Shift 电路
把这两个分开
那这两个分开之后
我们在把二极管左侧加一个蓝色
这个蓝色的线 大电容
使得它开关噪音在这个小的 loop 里面
能够通过 PCB 的 layout
让它形成一个很小的 loop 回到功率地
然后在原边和副边整个的
这个自举的充电的过程当中加一些电容和电阻
我们就可以看到就是
这一部分 dv/dt 所产生的噪声
它被限制在功率地
使得它信号地相对就比较干净
噪声小使得这个问题解决掉
所以 27714 在处理 dv/dt 的过程当中
也是做了专门的内部电路设计
那讨论完了 dv/dt
然后另外一部分就是这个 di/dt
我们知道这个 di/dt 的变化如果过快的话
它从这个 switchnode 到地
在开关管关断的时候
开关管关断的 上管关断的时候电流下降
然后下管的电流在上升
这部分的话就是因为负载电流
在这个时候就是 assume 假设它是不变的
因为开关的瞬间时间是非常短
在几百纳秒
电感的电流在这个时候是变化是非常微小的
那我们可以看到当这个电流
它在往上增加的时候
电感引起的反向电压
就使得 switch node 的电压低于这个地的电压
电压低到一定程度之后就会产生 Driver malfunction
为了针对这个功能
那 UCC27714它的这个负向瞬态安全工作区
就做了合理的优化
比如在200纳秒的时候它可以承受-30V
如果是100纳秒它可以承受-70V 的电压
所以使得栅极上管和下管驱动器
更加的抗干扰能力增强
然后 TIDA-01159
这个是一个 TI 给的参考设计
它是针对我们刚开始讲的 UCC21520和
SN6505 设计的一个小的单元模块
包括电源
包括隔离驱动器形成的一个驱动半桥的 EVM
所以详细的信息可以在 TI.com
搜索 TIDA-01159 获取详细的信息
这边我们给出一个总结
所以我们这个里面讲到了 Gate Driver
栅极驱动器的应用
讲了一些基本的一些参数的了解
讨论到低压侧高压侧和低压侧
还有包括隔离驱动
除此之外我们深入的讨论了寄生参数
软开关 硬开关 非线性电容
以及 dv/dt di/dt 所产生的噪声
和怎么通过 PCB 的解决
和选取合理的 Gate driver 去避免这些问题
作了深入的探讨
详细的信息也在 TIDA 当中
给出了一些案例
那非常感谢大家花时间来参加这个培训
如果有什么问题请及时的做出反馈
谢谢大家
手机看
扫码用手机观看
-
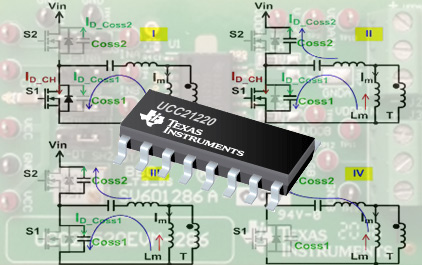 未学习 熟练掌握高压MOSFET/IGBT栅极驱动设计
未学习 熟练掌握高压MOSFET/IGBT栅极驱动设计
01:01:25
播放中
 视频简介
视频简介
熟练掌握高压MOSFET/IGBT栅极驱动设计
所属课程:熟练掌握高压MOSFET/IGBT栅极驱动设计
发布时间:2018.03.27
视频集数:1
本节视频时长:01:01:25
本篇培训材料在介绍最新的功率半导体栅极驱动的基本要求的基础上深入探讨了电路寄生参数对驱动的设计影响,对比了软开关和硬开关驱动的设计特点和区别,也深入探讨了CMTI及其PCB的优化设计指导。