
人工智能
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 18 - 串行通信
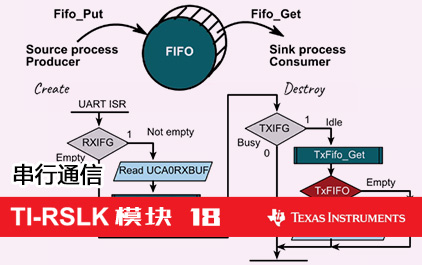
此模块的目的是介绍先进先出 (FIFO) 队列的原理和用法;这种队列使用串行通道将机器人连接到 PC。您将创建两个 FIFO 队列并设计一个命令解释器来帮助解决机器人挑战。您将使用通用异步收发器 (UART) 开发中断设备驱动程序。该串行端口可让微控制器与其他计算机、输入传感器和输出显示器等设备进行通信。
开始学习
收藏本课程
课程报错


