
人工智能
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
Loading the player...

本实验的目的是创建以通过中断实现的 驱动程序。 在本实验中,您只需要 但在可选部分,我们要 使用整个机器人。 在本实验的可选部分, 您可以创建一个命令解释器, 并在机器人挑战中协助您。 现在让我们开始吧。 现在我已经为我的实验 它的内容包含在该结构中。 我所做的工作就是 将我可以键入到解释器中的各种命令 与我在执行这些命令时将得到的响应关联起来。 让我来向您展示一下。 现在我已经在处理器中运行它, 因此我要在此处单击机器人上的复位按钮。 现在,这是我的解释器。 这里有一整套命令。 关于您的行为动作的实际语句实际上并不重要。 这刚好是您可以使用的完整的计算器。 但此处的一个重要之处是,我可以使用解释器 向我的机器人发送命令,比如,让我们将占空比 设置为 或者我可以说一些类似于“开始”这样的命令。 你好,机器人,请向前走。 看到了吗,我可以使用解释器读取我的传感器, 比如碰撞传感器。 我甚至可以编程更加复杂的命令, 比如,按方形移动。 现在,解释器在这里的目的是 让您与机器人互动。 在本实验中,您了解到了以中断为驱动的输入/输入 以及先入先出队列是执行输入/输出的一种 十分有效的方法。现在,部件调试是指您要单独测试 每个子系统。 但是,一旦将所有这些子系统 合并起来,形成 此时再进行调试则十分困难。 命令解释器使您可以 测试复杂系统的多个部件, 无需对您要测试的每一项内容单独进行编辑、编译、下载 和运行循环。 因此我建议您尝试此实验,尝试此可选部分, 并使用它来解决您的机器人挑战。 祝您愉快。
本实验的目的是创建以通过中断实现的
驱动程序。
在本实验中,您只需要
但在可选部分,我们要
使用整个机器人。
在本实验的可选部分,
您可以创建一个命令解释器,
并在机器人挑战中协助您。
现在让我们开始吧。
现在我已经为我的实验
它的内容包含在该结构中。
我所做的工作就是
将我可以键入到解释器中的各种命令
与我在执行这些命令时将得到的响应关联起来。
让我来向您展示一下。
现在我已经在处理器中运行它,
因此我要在此处单击机器人上的复位按钮。
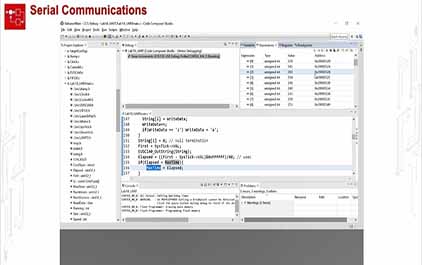
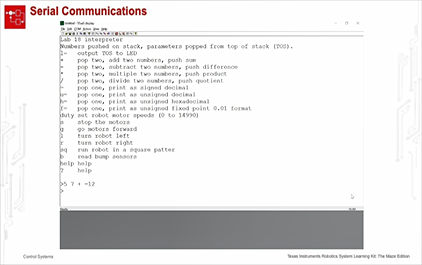
现在,这是我的解释器。
这里有一整套命令。
关于您的行为动作的实际语句实际上并不重要。
这刚好是您可以使用的完整的计算器。
但此处的一个重要之处是,我可以使用解释器
向我的机器人发送命令,比如,让我们将占空比
设置为
或者我可以说一些类似于“开始”这样的命令。
你好,机器人,请向前走。
看到了吗,我可以使用解释器读取我的传感器,
比如碰撞传感器。
我甚至可以编程更加复杂的命令,
比如,按方形移动。
现在,解释器在这里的目的是
让您与机器人互动。
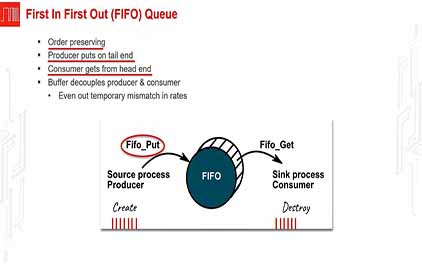
在本实验中,您了解到了以中断为驱动的输入/输入
以及先入先出队列是执行输入/输出的一种
十分有效的方法。现在,部件调试是指您要单独测试
每个子系统。
但是,一旦将所有这些子系统
合并起来,形成
此时再进行调试则十分困难。
命令解释器使您可以
测试复杂系统的多个部件,
无需对您要测试的每一项内容单独进行编辑、编译、下载
和运行循环。
因此我建议您尝试此实验,尝试此可选部分,
并使用它来解决您的机器人挑战。
祝您愉快。
手机看
收藏本课程
扫码用手机观看
-
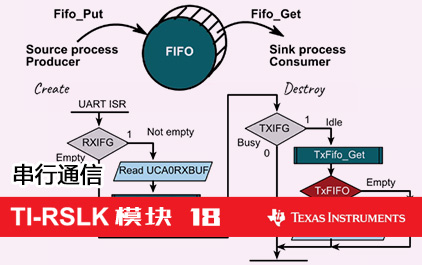
 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
-
 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
-
 未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
-
 未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器



 视频简介
视频简介
TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
所属课程:TI-RSLK 模块 18 - 串行通信
发布时间:2018.08.27
视频集数:4
本节视频时长:00:02:38
利用命令解译器测试复杂系统的各个部分。

