3、双极步进电机中的微步进
Loading the player...
将在30s后自动为您播放下一课程
欢迎观看 TI 高精度实验室 步进电机系列第三章。 我叫 James Lockridge。 今天我将讨论 双极步进电机的 微步进驱动。 微步进是 一种步进驱动技术, 可以帮助步进电机 实现精确的定位 和平滑的运动。 此幻灯片上的动画 展示了微步进 如何影响 齿轮运动的 一个示例。 大多数步进电机的 典型步距为 0.9 度/步 到 32 度/步。 因此请注意, 此动画中所显示的 动作被夸大了。 通过使用电流 调节技术来 创建称为半步进 或微步进的中间步进, 步进驱动器 可以更精确地 定位负载。 电流调节电路 可将绕组电流 调整在不同的电平, 以使每个绕组 产生强度 不同的磁场。 当每个绕组的 磁场叠加在一起时, 它们会产生 一个总转矩, 该转矩会将转子 定位在整步之间的 各个微步位置上。 一些集成式步进 驱动器可以创建 比整步 小 256 倍的 微步。 电流调节是 步进驱动器 实现微步进的 重要组成部分。 双极步进驱动器的 输出级由 两个 H 桥组成, 这两个 H 桥将电流驱动到 两个电机绕组中。 这些 H 桥控制 电流流动的方向, 并最终控制 由标准绕组产生的 磁场的极性 和强度。 当连接到 绕组 A 的 H 桥 导通其中一个高侧 FET 和 相反的低侧 FET 时, 电流流经绕组 A 并产生一个 北磁极。 为了改变 该磁场的极性, 驱动器会关闭 这些 FET 并打开相反的 FET。 类似地, B 相 H 桥 将电流驱动 到 B 相绕组中, 从而在步进器中 产生第二个磁场。 通过在不同的时间 激励 A 相和 B 相, 当转子磁场不断 尝试与定子磁场对齐时, 驱动器能 以离散步距 移动转子。 整步进是 驱动步进电机 最简单的方法之一。 第一步,步进 驱动器通过 A 相和 B 相 绕组发送电流, 在每个绕组上 形成一个北极。 尽管此动画中 并未显示, 但 A 相和 B 相 绕组分布在 电机周围, 并根据其位置 和线圈绕组方向 产生交变磁极。 在第一步中, 转子旋转以使 其南极与定子 绕组上的北极 对齐。 如果 A 相和 B 相 电流没有变化, 则转子将保持 在此位置。 为了使转子 继续运动, 驱动器关闭 第一组 FET, 并在 B 相中导通 相反方向的 FET,以使 相反方向的电流通过绕组。 这会改变由 B 相 产生的磁极的极性。 绕组中电流方向的 切换过程继续进行, 导致转子 以离散步距运动。 步进驱动器可以 使用半步进 来在整步 之间的中间位置 实现转子位置。 此图显示了 使用称为非圆形 半步进技术的 步进绕组中的电流。 动画显示了 步进转子如何 以非圆形 半步进旋转。 在整步位置之间, 电机与 激励相位直接对齐, 而另一相去激励。 这是一种实现 中间半步进的 简单方法, 在切换其中一个步进相的 磁极之前, 关闭其中一个 步进相的 H 桥输出。 只要电机的电源 电压等于或小于 电机的额定电压, 就可以在没有 电流调节的情况下 实现整步进和 非圆形半步进。 如果电机电源 电压高于电机 额定电压, 则必须将电流 调节为小于或等于 电机额定电流。 虽然非圆形 半步进易于实现, 但它具有高转矩纹波, 会引起振动和 抖动。 标准半步进 在中间步进中 将绕组电流 调节为 70.7%, 以提供更一致的扭矩 和更平稳的运动。 动画显示了 电流如何 流过 H 桥 以及此配置 如何驱动步进器 连续运动。 使用电流调节, 集成式步进驱动器 可以实现 更小的步距。 此动画 显示 1/4 步进。 驱动器调节 步进线圈中的电流, 以在整步进 位置之间实现 转子位置。 使用集成电流 调节技术, 许多驱动器可以 实现 1/6、1/32 甚至 1/256 微步进。 在选择微步进或 整步进时 需要进行一些 系统级的权衡。 虽然采用分立 器件最容易实现整步进, 但系统可能会 出现振动和 噪声问题。 半步进和微步进 可以减少振动和噪声, 但是某些情况下, 由于步距间的增量转矩减小, 可能会导致电机跳步。 微步进通常 需要额外的电路 来实现电流调节。 然而,大多数集成 步进驱动器 都集成了某种 电流调节功能, 可将电流自动 调节到微步进 所需的适当电平。 然而,大多数集成 步进驱动器 都集成了某种 电流调节功能, 可将电流自动 调节到微步进 所需的适当电平。 有关步进电机 和 TI 集成式步进 驱动器的 更多信息, 请访问 ti.com 上的 步进驱动器页面。
欢迎观看 TI 高精度实验室 步进电机系列第三章。 我叫 James Lockridge。 今天我将讨论 双极步进电机的 微步进驱动。 微步进是 一种步进驱动技术, 可以帮助步进电机 实现精确的定位 和平滑的运动。 此幻灯片上的动画 展示了微步进 如何影响 齿轮运动的 一个示例。 大多数步进电机的 典型步距为 0.9 度/步 到 32 度/步。 因此请注意, 此动画中所显示的 动作被夸大了。 通过使用电流 调节技术来 创建称为半步进 或微步进的中间步进, 步进驱动器 可以更精确地 定位负载。 电流调节电路 可将绕组电流 调整在不同的电平, 以使每个绕组 产生强度 不同的磁场。 当每个绕组的 磁场叠加在一起时, 它们会产生 一个总转矩, 该转矩会将转子 定位在整步之间的 各个微步位置上。 一些集成式步进 驱动器可以创建 比整步 小 256 倍的 微步。 电流调节是 步进驱动器 实现微步进的 重要组成部分。 双极步进驱动器的 输出级由 两个 H 桥组成, 这两个 H 桥将电流驱动到 两个电机绕组中。 这些 H 桥控制 电流流动的方向, 并最终控制 由标准绕组产生的 磁场的极性 和强度。 当连接到 绕组 A 的 H 桥 导通其中一个高侧 FET 和 相反的低侧 FET 时, 电流流经绕组 A 并产生一个 北磁极。 为了改变 该磁场的极性, 驱动器会关闭 这些 FET 并打开相反的 FET。 类似地, B 相 H 桥 将电流驱动 到 B 相绕组中, 从而在步进器中 产生第二个磁场。 通过在不同的时间 激励 A 相和 B 相, 当转子磁场不断 尝试与定子磁场对齐时, 驱动器能 以离散步距 移动转子。 整步进是 驱动步进电机 最简单的方法之一。 第一步,步进 驱动器通过 A 相和 B 相 绕组发送电流, 在每个绕组上 形成一个北极。 尽管此动画中 并未显示, 但 A 相和 B 相 绕组分布在 电机周围, 并根据其位置 和线圈绕组方向 产生交变磁极。 在第一步中, 转子旋转以使 其南极与定子 绕组上的北极 对齐。 如果 A 相和 B 相 电流没有变化, 则转子将保持 在此位置。 为了使转子 继续运动, 驱动器关闭 第一组 FET, 并在 B 相中导通 相反方向的 FET,以使 相反方向的电流通过绕组。 这会改变由 B 相 产生的磁极的极性。 绕组中电流方向的 切换过程继续进行, 导致转子 以离散步距运动。 步进驱动器可以 使用半步进 来在整步 之间的中间位置 实现转子位置。 此图显示了 使用称为非圆形 半步进技术的 步进绕组中的电流。 动画显示了 步进转子如何 以非圆形 半步进旋转。 在整步位置之间, 电机与 激励相位直接对齐, 而另一相去激励。 这是一种实现 中间半步进的 简单方法, 在切换其中一个步进相的 磁极之前, 关闭其中一个 步进相的 H 桥输出。 只要电机的电源 电压等于或小于 电机的额定电压, 就可以在没有 电流调节的情况下 实现整步进和 非圆形半步进。 如果电机电源 电压高于电机 额定电压, 则必须将电流 调节为小于或等于 电机额定电流。 虽然非圆形 半步进易于实现, 但它具有高转矩纹波, 会引起振动和 抖动。 标准半步进 在中间步进中 将绕组电流 调节为 70.7%, 以提供更一致的扭矩 和更平稳的运动。 动画显示了 电流如何 流过 H 桥 以及此配置 如何驱动步进器 连续运动。 使用电流调节, 集成式步进驱动器 可以实现 更小的步距。 此动画 显示 1/4 步进。 驱动器调节 步进线圈中的电流, 以在整步进 位置之间实现 转子位置。 使用集成电流 调节技术, 许多驱动器可以 实现 1/6、1/32 甚至 1/256 微步进。 在选择微步进或 整步进时 需要进行一些 系统级的权衡。 虽然采用分立 器件最容易实现整步进, 但系统可能会 出现振动和 噪声问题。 半步进和微步进 可以减少振动和噪声, 但是某些情况下, 由于步距间的增量转矩减小, 可能会导致电机跳步。 微步进通常 需要额外的电路 来实现电流调节。 然而,大多数集成 步进驱动器 都集成了某种 电流调节功能, 可将电流自动 调节到微步进 所需的适当电平。 然而,大多数集成 步进驱动器 都集成了某种 电流调节功能, 可将电流自动 调节到微步进 所需的适当电平。 有关步进电机 和 TI 集成式步进 驱动器的 更多信息, 请访问 ti.com 上的 步进驱动器页面。
欢迎观看 TI 高精度实验室
步进电机系列第三章。
我叫 James Lockridge。
今天我将讨论 双极步进电机的
微步进驱动。
微步进是 一种步进驱动技术,
可以帮助步进电机 实现精确的定位
和平滑的运动。
此幻灯片上的动画 展示了微步进
如何影响 齿轮运动的
一个示例。
大多数步进电机的 典型步距为
0.9 度/步 到 32 度/步。
因此请注意, 此动画中所显示的
动作被夸大了。
通过使用电流 调节技术来
创建称为半步进 或微步进的中间步进,
步进驱动器 可以更精确地
定位负载。
电流调节电路 可将绕组电流
调整在不同的电平, 以使每个绕组
产生强度 不同的磁场。
当每个绕组的 磁场叠加在一起时,
它们会产生 一个总转矩,
该转矩会将转子 定位在整步之间的
各个微步位置上。
一些集成式步进 驱动器可以创建
比整步 小 256 倍的
微步。
电流调节是 步进驱动器
实现微步进的 重要组成部分。
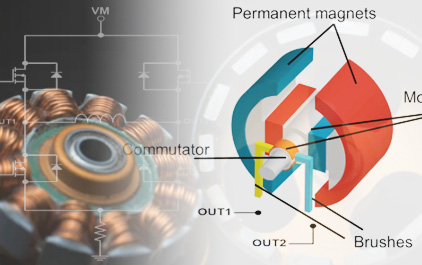
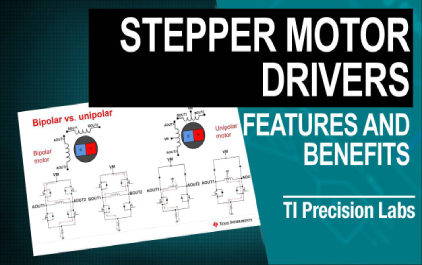
双极步进驱动器的 输出级由
两个 H 桥组成, 这两个 H 桥将电流驱动到
两个电机绕组中。
这些 H 桥控制 电流流动的方向,
并最终控制 由标准绕组产生的
磁场的极性 和强度。
当连接到 绕组 A 的 H 桥
导通其中一个高侧 FET 和 相反的低侧 FET 时,
电流流经绕组 A 并产生一个
北磁极。
为了改变 该磁场的极性,
驱动器会关闭 这些 FET 并打开相反的 FET。
类似地, B 相 H 桥
将电流驱动 到 B 相绕组中,
从而在步进器中 产生第二个磁场。
通过在不同的时间 激励 A 相和 B 相,
当转子磁场不断 尝试与定子磁场对齐时,
驱动器能 以离散步距
移动转子。
整步进是 驱动步进电机
最简单的方法之一。
第一步,步进 驱动器通过 A 相和 B 相
绕组发送电流, 在每个绕组上
形成一个北极。
尽管此动画中 并未显示,
但 A 相和 B 相 绕组分布在
电机周围, 并根据其位置
和线圈绕组方向 产生交变磁极。
在第一步中, 转子旋转以使
其南极与定子 绕组上的北极
对齐。
如果 A 相和 B 相 电流没有变化,
则转子将保持 在此位置。
为了使转子 继续运动,
驱动器关闭 第一组 FET,
并在 B 相中导通 相反方向的 FET,以使
相反方向的电流通过绕组。
这会改变由 B 相 产生的磁极的极性。
绕组中电流方向的 切换过程继续进行,
导致转子
以离散步距运动。
步进驱动器可以 使用半步进
来在整步 之间的中间位置
实现转子位置。
此图显示了 使用称为非圆形
半步进技术的 步进绕组中的电流。
动画显示了 步进转子如何
以非圆形 半步进旋转。
在整步位置之间,
电机与 激励相位直接对齐,
而另一相去激励。
这是一种实现 中间半步进的
简单方法, 在切换其中一个步进相的
磁极之前, 关闭其中一个
步进相的 H 桥输出。
只要电机的电源 电压等于或小于
电机的额定电压, 就可以在没有
电流调节的情况下 实现整步进和
非圆形半步进。
如果电机电源 电压高于电机
额定电压, 则必须将电流
调节为小于或等于 电机额定电流。
虽然非圆形 半步进易于实现,
但它具有高转矩纹波, 会引起振动和
抖动。
标准半步进 在中间步进中
将绕组电流 调节为 70.7%,
以提供更一致的扭矩 和更平稳的运动。
动画显示了 电流如何
流过 H 桥 以及此配置
如何驱动步进器 连续运动。
使用电流调节, 集成式步进驱动器
可以实现 更小的步距。
此动画 显示 1/4 步进。
驱动器调节 步进线圈中的电流,
以在整步进 位置之间实现
转子位置。
使用集成电流 调节技术,
许多驱动器可以 实现 1/6、1/32 甚至
1/256 微步进。
在选择微步进或 整步进时
需要进行一些 系统级的权衡。
虽然采用分立 器件最容易实现整步进,
但系统可能会 出现振动和
噪声问题。
半步进和微步进 可以减少振动和噪声,
但是某些情况下,
由于步距间的增量转矩减小, 可能会导致电机跳步。
微步进通常 需要额外的电路
来实现电流调节。
然而,大多数集成 步进驱动器
都集成了某种 电流调节功能,
可将电流自动 调节到微步进
所需的适当电平。
然而,大多数集成 步进驱动器
都集成了某种 电流调节功能,
可将电流自动 调节到微步进
所需的适当电平。
有关步进电机 和 TI 集成式步进
驱动器的 更多信息,
请访问 ti.com 上的 步进驱动器页面。
欢迎观看 TI 高精度实验室 步进电机系列第三章。 我叫 James Lockridge。 今天我将讨论 双极步进电机的 微步进驱动。 微步进是 一种步进驱动技术, 可以帮助步进电机 实现精确的定位 和平滑的运动。 此幻灯片上的动画 展示了微步进 如何影响 齿轮运动的 一个示例。 大多数步进电机的 典型步距为 0.9 度/步 到 32 度/步。 因此请注意, 此动画中所显示的 动作被夸大了。 通过使用电流 调节技术来 创建称为半步进 或微步进的中间步进, 步进驱动器 可以更精确地 定位负载。 电流调节电路 可将绕组电流 调整在不同的电平, 以使每个绕组 产生强度 不同的磁场。 当每个绕组的 磁场叠加在一起时, 它们会产生 一个总转矩, 该转矩会将转子 定位在整步之间的 各个微步位置上。 一些集成式步进 驱动器可以创建 比整步 小 256 倍的 微步。 电流调节是 步进驱动器 实现微步进的 重要组成部分。 双极步进驱动器的 输出级由 两个 H 桥组成, 这两个 H 桥将电流驱动到 两个电机绕组中。 这些 H 桥控制 电流流动的方向, 并最终控制 由标准绕组产生的 磁场的极性 和强度。 当连接到 绕组 A 的 H 桥 导通其中一个高侧 FET 和 相反的低侧 FET 时, 电流流经绕组 A 并产生一个 北磁极。 为了改变 该磁场的极性, 驱动器会关闭 这些 FET 并打开相反的 FET。 类似地, B 相 H 桥 将电流驱动 到 B 相绕组中, 从而在步进器中 产生第二个磁场。 通过在不同的时间 激励 A 相和 B 相, 当转子磁场不断 尝试与定子磁场对齐时, 驱动器能 以离散步距 移动转子。 整步进是 驱动步进电机 最简单的方法之一。 第一步,步进 驱动器通过 A 相和 B 相 绕组发送电流, 在每个绕组上 形成一个北极。 尽管此动画中 并未显示, 但 A 相和 B 相 绕组分布在 电机周围, 并根据其位置 和线圈绕组方向 产生交变磁极。 在第一步中, 转子旋转以使 其南极与定子 绕组上的北极 对齐。 如果 A 相和 B 相 电流没有变化, 则转子将保持 在此位置。 为了使转子 继续运动, 驱动器关闭 第一组 FET, 并在 B 相中导通 相反方向的 FET,以使 相反方向的电流通过绕组。 这会改变由 B 相 产生的磁极的极性。 绕组中电流方向的 切换过程继续进行, 导致转子 以离散步距运动。 步进驱动器可以 使用半步进 来在整步 之间的中间位置 实现转子位置。 此图显示了 使用称为非圆形 半步进技术的 步进绕组中的电流。 动画显示了 步进转子如何 以非圆形 半步进旋转。 在整步位置之间, 电机与 激励相位直接对齐, 而另一相去激励。 这是一种实现 中间半步进的 简单方法, 在切换其中一个步进相的 磁极之前, 关闭其中一个 步进相的 H 桥输出。 只要电机的电源 电压等于或小于 电机的额定电压, 就可以在没有 电流调节的情况下 实现整步进和 非圆形半步进。 如果电机电源 电压高于电机 额定电压, 则必须将电流 调节为小于或等于 电机额定电流。 虽然非圆形 半步进易于实现, 但它具有高转矩纹波, 会引起振动和 抖动。 标准半步进 在中间步进中 将绕组电流 调节为 70.7%, 以提供更一致的扭矩 和更平稳的运动。 动画显示了 电流如何 流过 H 桥 以及此配置 如何驱动步进器 连续运动。 使用电流调节, 集成式步进驱动器 可以实现 更小的步距。 此动画 显示 1/4 步进。 驱动器调节 步进线圈中的电流, 以在整步进 位置之间实现 转子位置。 使用集成电流 调节技术, 许多驱动器可以 实现 1/6、1/32 甚至 1/256 微步进。 在选择微步进或 整步进时 需要进行一些 系统级的权衡。 虽然采用分立 器件最容易实现整步进, 但系统可能会 出现振动和 噪声问题。 半步进和微步进 可以减少振动和噪声, 但是某些情况下, 由于步距间的增量转矩减小, 可能会导致电机跳步。 微步进通常 需要额外的电路 来实现电流调节。 然而,大多数集成 步进驱动器 都集成了某种 电流调节功能, 可将电流自动 调节到微步进 所需的适当电平。 然而,大多数集成 步进驱动器 都集成了某种 电流调节功能, 可将电流自动 调节到微步进 所需的适当电平。 有关步进电机 和 TI 集成式步进 驱动器的 更多信息, 请访问 ti.com 上的 步进驱动器页面。
欢迎观看 TI 高精度实验室
步进电机系列第三章。
我叫 James Lockridge。
今天我将讨论 双极步进电机的
微步进驱动。
微步进是 一种步进驱动技术,
可以帮助步进电机 实现精确的定位
和平滑的运动。
此幻灯片上的动画 展示了微步进
如何影响 齿轮运动的
一个示例。
大多数步进电机的 典型步距为
0.9 度/步 到 32 度/步。
因此请注意, 此动画中所显示的
动作被夸大了。
通过使用电流 调节技术来
创建称为半步进 或微步进的中间步进,
步进驱动器 可以更精确地
定位负载。
电流调节电路 可将绕组电流
调整在不同的电平, 以使每个绕组
产生强度 不同的磁场。
当每个绕组的 磁场叠加在一起时,
它们会产生 一个总转矩,
该转矩会将转子 定位在整步之间的
各个微步位置上。
一些集成式步进 驱动器可以创建
比整步 小 256 倍的
微步。
电流调节是 步进驱动器
实现微步进的 重要组成部分。
双极步进驱动器的 输出级由
两个 H 桥组成, 这两个 H 桥将电流驱动到
两个电机绕组中。
这些 H 桥控制 电流流动的方向,
并最终控制 由标准绕组产生的
磁场的极性 和强度。
当连接到 绕组 A 的 H 桥
导通其中一个高侧 FET 和 相反的低侧 FET 时,
电流流经绕组 A 并产生一个
北磁极。
为了改变 该磁场的极性,
驱动器会关闭 这些 FET 并打开相反的 FET。
类似地, B 相 H 桥
将电流驱动 到 B 相绕组中,
从而在步进器中 产生第二个磁场。
通过在不同的时间 激励 A 相和 B 相,
当转子磁场不断 尝试与定子磁场对齐时,
驱动器能 以离散步距
移动转子。
整步进是 驱动步进电机
最简单的方法之一。
第一步,步进 驱动器通过 A 相和 B 相
绕组发送电流, 在每个绕组上
形成一个北极。
尽管此动画中 并未显示,
但 A 相和 B 相 绕组分布在
电机周围, 并根据其位置
和线圈绕组方向 产生交变磁极。
在第一步中, 转子旋转以使
其南极与定子 绕组上的北极
对齐。
如果 A 相和 B 相 电流没有变化,
则转子将保持 在此位置。
为了使转子 继续运动,
驱动器关闭 第一组 FET,
并在 B 相中导通 相反方向的 FET,以使
相反方向的电流通过绕组。
这会改变由 B 相 产生的磁极的极性。
绕组中电流方向的 切换过程继续进行,
导致转子
以离散步距运动。
步进驱动器可以 使用半步进
来在整步 之间的中间位置
实现转子位置。
此图显示了 使用称为非圆形
半步进技术的 步进绕组中的电流。
动画显示了 步进转子如何
以非圆形 半步进旋转。
在整步位置之间,
电机与 激励相位直接对齐,
而另一相去激励。
这是一种实现 中间半步进的
简单方法, 在切换其中一个步进相的
磁极之前, 关闭其中一个
步进相的 H 桥输出。
只要电机的电源 电压等于或小于
电机的额定电压, 就可以在没有
电流调节的情况下 实现整步进和
非圆形半步进。
如果电机电源 电压高于电机
额定电压, 则必须将电流
调节为小于或等于 电机额定电流。
虽然非圆形 半步进易于实现,
但它具有高转矩纹波, 会引起振动和
抖动。
标准半步进 在中间步进中
将绕组电流 调节为 70.7%,
以提供更一致的扭矩 和更平稳的运动。
动画显示了 电流如何
流过 H 桥 以及此配置
如何驱动步进器 连续运动。
使用电流调节, 集成式步进驱动器
可以实现 更小的步距。
此动画 显示 1/4 步进。
驱动器调节 步进线圈中的电流,
以在整步进 位置之间实现
转子位置。
使用集成电流 调节技术,
许多驱动器可以 实现 1/6、1/32 甚至
1/256 微步进。
在选择微步进或 整步进时
需要进行一些 系统级的权衡。
虽然采用分立 器件最容易实现整步进,
但系统可能会 出现振动和
噪声问题。
半步进和微步进 可以减少振动和噪声,
但是某些情况下,
由于步距间的增量转矩减小, 可能会导致电机跳步。
微步进通常 需要额外的电路
来实现电流调节。
然而,大多数集成 步进驱动器
都集成了某种 电流调节功能,
可将电流自动 调节到微步进
所需的适当电平。
然而,大多数集成 步进驱动器
都集成了某种 电流调节功能,
可将电流自动 调节到微步进
所需的适当电平。
有关步进电机 和 TI 集成式步进
驱动器的 更多信息,
请访问 ti.com 上的 步进驱动器页面。
手机看
扫码用手机观看
 视频简介
视频简介
3、双极步进电机中的微步进
所属课程:TI 高精度实验室 - 电机驱动
发布时间:2020.04.29
视频集数:11
本节视频时长:00:06:53
了解有关电机驱动器类型,构造和设计的更多信息,以减少设计时间并开发更智能,更安全,更小巧的电机驱动器解决方案。



 未学习 1、基本介绍
未学习 1、基本介绍
 未学习 2、电机类型
未学习 2、电机类型
 未学习 1、刷式直流基础
未学习 1、刷式直流基础
 未学习 2、H-Bridge
未学习 2、H-Bridge
 未学习 1、步进电机驱动器基础
未学习 1、步进电机驱动器基础
 未学习 2、步进电机驱动电路
未学习 2、步进电机驱动电路
 未学习 3、双极步进电机中的微步进
未学习 3、双极步进电机中的微步进
 未学习 4、集成式步进驱动器控制接口
未学习 4、集成式步进驱动器控制接口
 未学习 1、无刷直流基础
未学习 1、无刷直流基础
 未学习 4、梯形换向
未学习 4、梯形换向
 未学习 1、保护功能
未学习 1、保护功能











