
电机驱动器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
1、步进电机驱动器基础


[音乐播放]
欢迎观看 TI 高精度实验室
步进电机系列第一章。
我叫 James Lockridge,今天我们
将讨论步进 电机的基础知识。
许多应用都 使用步进电机,
因为它们无需 外部传感器
或复杂的控制算法 即可进行精确的
位置控制。
有时我们将其称为 开环位置控制。
步进电机可以 提供连续运动,
或保持固定的 转子位置,
具体取决于系统要求。
这些特性使得 步进器易于实现,
并且为系统设计人员提供了 一种低成本解决方案。
在深入探讨 步进电机之前,
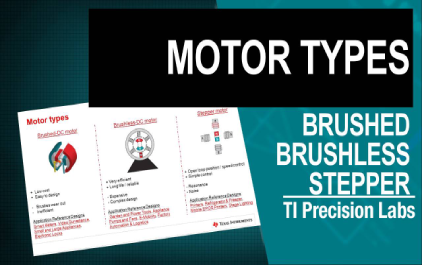
我将回顾一下 它们相比其他常见
电机类型的适用范围,
刷式直流、 无刷直流
和步进电机是 最常见的由直流电源
供电的电机类型。
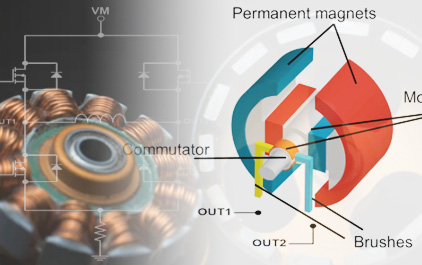
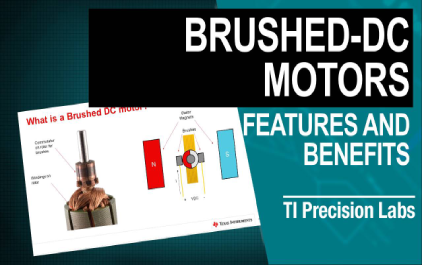
刷式直流电机的 转子上有一个绕组。
由金属或碳制成的 电刷通过转子上的
换向器 激励绕组。
当转子旋转时, 换向器改变
电流流经
绕组的方向。
当电流改变 转子绕组的
方向时, 转子磁场的
极性就会改变。
换向器确保 转子上磁场的
极性始终与 定子上的磁体
或绕组产生的 磁场相反。
这将在刷式直流 电机中产生连续运动。
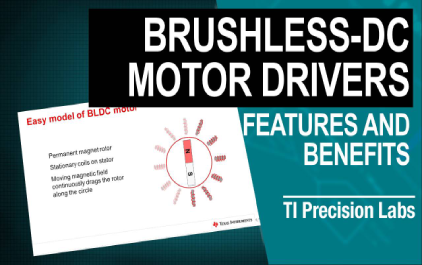
无刷直流电机的 转子上有永磁体,
定子上有绕组。
这与刷式 直流电机的结构
相反。
对于无刷 直流电机,
没有电刷或 机械换向器。
换向通过 电气控制实现。
通常,无刷直流 电机具有三个相位,
当以正确的顺序 进行激励时会产生
运动。
动画和图像所示的 电机技术先进,
其转子磁体的 安装位置
像外壳一样位于 内部定子绕组周围。
步进电机与 无刷直流电机相似,
因为它们也 可以电气换向。
步进电机通常 只有两个相位。
但是,存在具有三个 或更多相位的步进器。
步进电机中的 转子根据每个
相绕组中电流的 大小和方向
以离散的位置步距
运动。
步进电机有 三种主要类型:
永磁式、混合式 和可变磁阻式。
永磁步进 电机的转子上
有永磁体。
绕组线圈方向与 转子轴线方向
相同。
定子上的转子齿 有助于引导
来自转子的磁场 与定子上的绕组相互作用。
转子上的磁极 平行于
转子表面上的
转子旋转轴。
当永磁体移动到 与激励绕组的
磁场对齐时, 就会发生转子运动。
可变磁阻电机 不使用任何
永磁体。
转子由与定子 相同的电磁钢制成。
可变磁阻电机 之所以得此名,
是因为磁场 可使转子移动到
气隙和磁阻
最小的位置。
磁阻的差异 是由转子和定子上
定子齿的形状
造成的。
可变磁阻步进 电机通常
需要至少三相 绕组来有效地
控制转子的
旋转方向。
混合式步进电机 之所以得此名,
是因为转子包含 一个永磁体,
而定子和转子 则具有转子齿,
就像可变磁 阻步进器一样。
步进器上的 永磁体的磁场
方向与转子的
旋转轴相同。
这与永磁步进
电机的结构不同。
磁体两侧的 端盖上的转子齿
将磁通路径从磁体 向外重定向到定子齿,
以最大程度地 增强磁场与绕组的
相互作用。
在这三种电机类型中, 混合电机最为常见,
而可变磁阻电机 最不常见。
永磁和混合式 步进电机通常
具有两相绕组, 尽管在某些情况下
它们可能具有更多的绕组。
与永磁体步进电机 相比,混合电机通常
具有更小的步距 和更高的转矩。
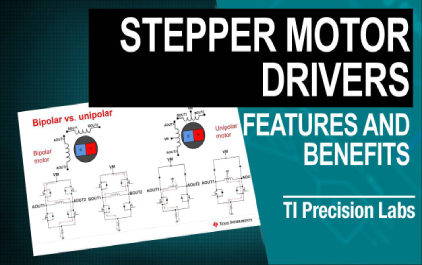
混合式和永磁式 步进电机
具有双极和 单极绕组配置。
对于双极电机, H 桥允许电流
沿任一方向 流经绕组。
电流的方向 决定了由该绕组
产生的磁场的极性。
单极电机仅需要 低侧或高侧 FET
来沿一个方向 驱动电流通过绕组。
单极电机的绕组 具有一个中心抽头,
该抽头可以接地 或连接到
电机电源。
特定相位的线圈 不是沿两个方向
驱动电流 来改变定子
磁场的极性, 而是沿相反方向缠绕,
以实现继续移动 转子所需的
磁场极性的
改变。
如果中心抽头 未连接并且线圈
连接到双极 步进电机驱动器,
则可以像驱动双极电机 一样来驱动单极电机。
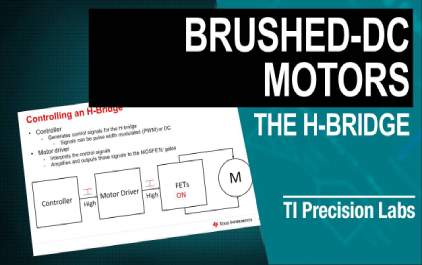
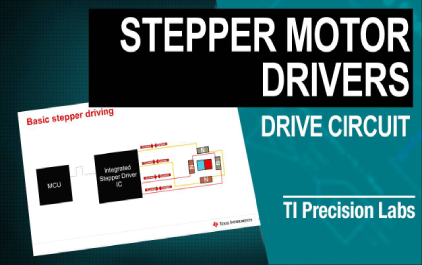
集成式步进驱动器 通过按特定顺序
激励步进器 绕组来控制
转子位置。
在此示例中, 微控制器
向步进驱动器 发送脉冲,
以指示步进转子 应移动到
下一个位置。
当步进驱动器 接收到步进脉冲时,
它将按顺序 激励其中一个相绕组。
当它接收到下一个脉冲时, 它将激励下一个相位,
由此转子便可 继续运动。
集成在步进 驱动器中的 H 桥
在两个方向上控制 相绕组中的电流,
用于改变绕组的 极性并继续
使转子运动。
如果微控制器 停止发送步进脉冲,
则转子将保持 静止并与
激励相位的 磁场对齐。
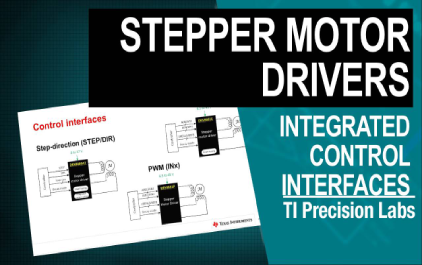
集成式步进驱动器 通常实现了保护、
微步进和步进调优等 额外特性。
有关步进电机 和 TI 集成式步进
驱动器的 更多信息,
请访问 TI.com 上的 步进驱动器页面。
-
 未学习 1、基本介绍
未学习 1、基本介绍
-
 未学习 2、电机类型
未学习 2、电机类型
-
 未学习 1、刷式直流基础
未学习 1、刷式直流基础
-
 未学习 2、H-Bridge
未学习 2、H-Bridge
-
 未学习 1、步进电机驱动器基础
未学习 1、步进电机驱动器基础
-
 未学习 2、步进电机驱动电路
未学习 2、步进电机驱动电路
-
 未学习 3、双极步进电机中的微步进
未学习 3、双极步进电机中的微步进
-
 未学习 4、集成式步进驱动器控制接口
未学习 4、集成式步进驱动器控制接口
-
 未学习 1、无刷直流基础
未学习 1、无刷直流基础
-
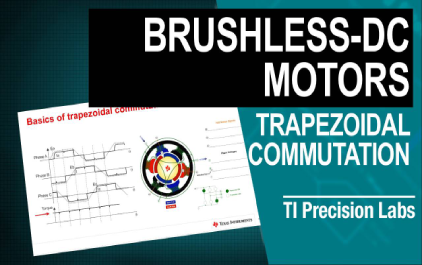 未学习 4、梯形换向
未学习 4、梯形换向
-
 未学习 1、保护功能
未学习 1、保护功能











