
电机驱动器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
2、H-Bridge



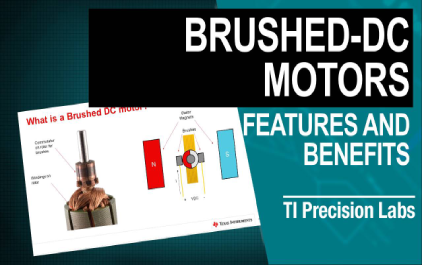
欢迎观看 TI 高精度 实验室系列刷式
直流电机第二章。
我叫 Hector Hernandez。
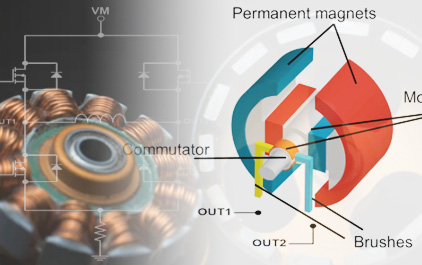
本章的目的是 解释 H 桥的定义、
它的制造方式、 它的组成部分
以及如何用它来 驱动刷式直流电机。
H 桥是一种看起来 像字母 H 的
电子电路,用于
在两个方向上 驱动负载
如刷式直流电动机。
它控制流向 负载的电流。
H 桥电路通常 使用的器件
包括高压电源 和接地;
用于电流再循环 和电流衰减的二极管 -
这些二极管
通常是 FET 的 体二极管;
负载,如刷式 直流电机;
以及四个开关, 如晶体管。
H 桥中最常见的 晶体管是 MOSFET。
由于其出色的 热性能和效率,
MOSFET 比双极 结型晶体管的使用
更加广泛。
NMOS FET 比 PMOS FET 更为常见,
因为 PMOS FET 需要更大的面积
才能实现 相同的载流能力。
NMOS FET 的 缺点在于,
栅极需要比源极 高 5 至 10 伏
才能导通高侧 FET。
这意味着高侧 FET 需要电荷泵
或自举电路 才能导通。
电机驱动器会优先选择集成 该电荷泵而不是采用自举。
在本演示中, FET 未集成在
电机驱动器内。
一些电机驱动器 集成了 FET。
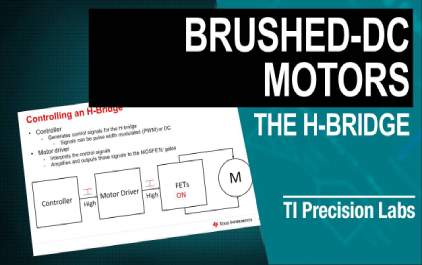
可以通过控制信号 来导通或关闭 FET。
控制信号通常
由微控制器产生。
这些信号可以是 脉宽调制信号或直流信号。
电机驱动器 解读控制信号
并将其放大,
以控制 H 桥中的 FET。
根据 FET 所连接的
控制信号的极性,
可以导通或关闭 FET。
通过控制 FET 的导通 或关闭时间以及
导通或关闭哪一个 FET, 可以控制流向电机的电流。
在 H 桥中, 有多种方法
可以控制流过 刷式直流电机的电流。
刷式直流电机 可以反向或
正向旋转。
一旦电流以正向 或反向流动,
电流的方向 将由电机的
电感维持。
当正向或反向 禁用 FET 时,
电流的方向 保持不变,
直到电流衰减至 0。
电流继续流过 未被驱动的
FET 的体二极管。
这些 FET 是 相反方向的 FET。
如果高侧或 低侧 FET
在驱动方向的 FET 关闭之前导通,
则两个 FET 导通的 期间可能存在
一段较短的时间。
这段时间 称为击穿,
其对 FET 和电机驱动器 来说可能是极为有害的。
可通过增加死区 时间来防止击穿发生。
死区时间是指 所有 FET 都关闭的时间段。
在禁用正向或 反向 FET 之后
且在导通另一个 方向的 FET 之前,
在换向过程中 插入死区时间。
例如,反向 驱动电机。
然后通过关闭 反向 FET 来插入
死区时间。
您可以导通 正向 FET 来更改
方向。
要返回反向, 请在换向之间
插入死区时间。
调节电流流动的 另一种方法叫做
快速衰减。
在快速衰减中, 电流衰减
可比其他衰减方法 (例如缓慢衰减)更快地衰减至 0。
这种方法 也称为滑行,
因为电机是滑行停止的 而不是制动停止。
此行为是由于 电机转速与电机
两端的电压 成正比造成的。
电压下降的速度 较慢,而电流衰减的
速度较快。
在快速衰减过程中, 电流将迅速衰减,
因为电压的 幅度更大,
但相反的极性被施加到了 驱动的感应流上。
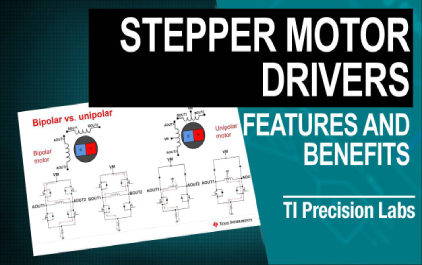
快速衰减有两种, 异步衰减和
同步衰减。
在电流衰减路径中 使用二极管时,
这种衰减称为 异步衰减。
例如,正向 驱动电机。
然后插入异步衰减 以衰减电流。
同样的衰减方法 可以在相反的方向实现。
另一方面, 同步衰减
发生在 FET 导通电阻 位于电流衰减路径中时,
而不是位于 体二极管中时。
利用 FET 导通电阻 代替 FET 体二极管
作为电流衰减的安全 路径往往更为高效。
在使用同步衰减 之前,死区时间
用于防止 击穿情况,
因为相反方向的 FET 将被导通。
例如,正向 驱动电机。
然后插入死区时间。
继而开始 同步衰减。
同样的衰减方法 可以在相反的方向实现。
有关刷式直流 电机和 TI 刷式直流电机
驱动器的更多信息, 请访问 ti.com 上的
“刷式直流电机驱动器”页面。
-
 未学习 1、基本介绍
未学习 1、基本介绍
-
 未学习 2、电机类型
未学习 2、电机类型
-
 未学习 1、刷式直流基础
未学习 1、刷式直流基础
-
 未学习 2、H-Bridge
未学习 2、H-Bridge
-
 未学习 1、步进电机驱动器基础
未学习 1、步进电机驱动器基础
-
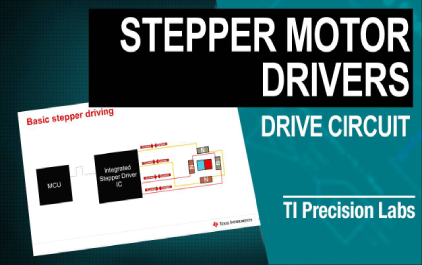 未学习 2、步进电机驱动电路
未学习 2、步进电机驱动电路
-
 未学习 3、双极步进电机中的微步进
未学习 3、双极步进电机中的微步进
-
 未学习 4、集成式步进驱动器控制接口
未学习 4、集成式步进驱动器控制接口
-
 未学习 1、无刷直流基础
未学习 1、无刷直流基础
-
 未学习 4、梯形换向
未学习 4、梯形换向
-
 未学习 1、保护功能
未学习 1、保护功能











