
数字电源 IC
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
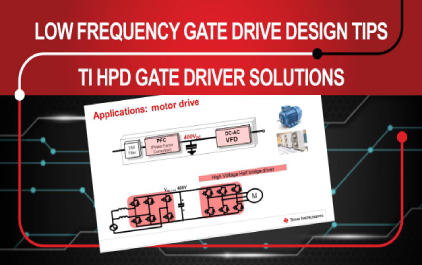
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
UCD3138数字滤波器模块:避免直通
Loading the player...
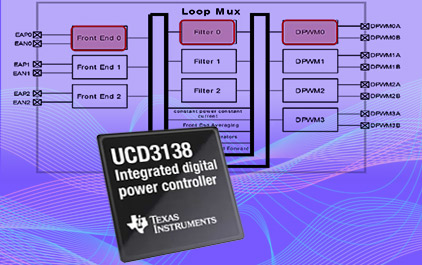

请注意,由于 滤波器输入超过 半个刻度或1、2、8, 计算得出的 DPWMB 上升沿 会超过事件 4。 如果 DPWMB 的上升沿 超过事件 4, 当 DPWMA 和 DPWMB 同时加电时, 会产生击穿, 如此处可见。 这在现实中可能会 对电源造成灾难性的 后果。 与此有关的一个方式是对 滤波器输出使用相应的 钳制。 查看滤波器初始化 函数中在 main.c 内 已注释掉的行。 撤销注释这些 行,构建代码, 并将代码下载 至该部分。 随着代码变化, 我们可以将滤波器 全程提高至 最大值而避免击穿, 如此处可见。 此处是滤波器的 占空比输出阶段。 我们以往选择 DPWM 周期 作为输出乘数, 从而滤波器输出 会调制 DPWMB 周期的 占空比。 在我们刚才完成的 代码更改中, 我们将输出 乘数更改为 k comp 0。 这是一个 14 位的值,我们将其设为 等于周期除以 2 以避免击穿。 请注意,我们须 将值右移 4 位, 以针对 k comp 0 与 DPWM 周期寄存器 之间各种对齐进行调整。 与使用滤波器 输出钳制相比, 此代码更改 是处理击穿的 更好选择,因为 它采用 滤波器的 整个动态范围。
请注意,由于 滤波器输入超过
半个刻度或1、2、8, 计算得出的 DPWMB 上升沿
会超过事件 4。
如果 DPWMB 的上升沿 超过事件 4,
当 DPWMA 和 DPWMB 同时加电时,
会产生击穿, 如此处可见。
这在现实中可能会 对电源造成灾难性的
后果。
与此有关的一个方式是对 滤波器输出使用相应的
钳制。
查看滤波器初始化 函数中在 main.c 内
已注释掉的行。
撤销注释这些 行,构建代码,
并将代码下载 至该部分。
随着代码变化, 我们可以将滤波器
全程提高至 最大值而避免击穿,
如此处可见。
此处是滤波器的 占空比输出阶段。
我们以往选择 DPWM 周期
作为输出乘数, 从而滤波器输出
会调制 DPWMB 周期的 占空比。
在我们刚才完成的 代码更改中,
我们将输出 乘数更改为 k comp 0。
这是一个 14 位的值,我们将其设为 等于周期除以
2 以避免击穿。
请注意,我们须 将值右移 4 位,
以针对 k comp 0 与 DPWM 周期寄存器
之间各种对齐进行调整。
与使用滤波器 输出钳制相比,
此代码更改 是处理击穿的
更好选择,因为 它采用
滤波器的 整个动态范围。
手机看
收藏本课程
扫码用手机观看
-
 未学习 UCD3138数字滤波器模块:数字滤波器模块简介
未学习 UCD3138数字滤波器模块:数字滤波器模块简介
-
 未学习 UCD3138数字滤波器模块:正常模式下DPWM操作概述
未学习 UCD3138数字滤波器模块:正常模式下DPWM操作概述
-
 未学习 UCD3138数字滤波器模块:数字滤波器架构和操作概述
未学习 UCD3138数字滤波器模块:数字滤波器架构和操作概述
-
 未学习 UCD3138数字滤波器模块:介绍环路复用器
未学习 UCD3138数字滤波器模块:介绍环路复用器
-
 未学习 UCD3138数字滤波器模块:本教程的编码任务
未学习 UCD3138数字滤波器模块:本教程的编码任务
-
 未学习 UCD3138数字滤波器模块:固件任务的解决方案
未学习 UCD3138数字滤波器模块:固件任务的解决方案
-
 未学习 UCD3138数字滤波器模块:避免直通
未学习 UCD3138数字滤波器模块:避免直通






 视频简介
视频简介
UCD3138数字滤波器模块:避免直通
所属课程:UCD3138数字滤波器模块
发布时间:2019.03.11
视频集数:7
本节视频时长:00:03:21
该培训介绍了数字滤波器模块,该模块用作UCD3138系列器件提供的闭环系统中的补偿器。 该模块旨在取代基于模拟电源管理控制器IC的电源中使用的模拟补偿网络。

