UCD3138数字滤波器模块:数字滤波器架构和操作概述
Loading the player...
将在30s后自动为您播放下一课程
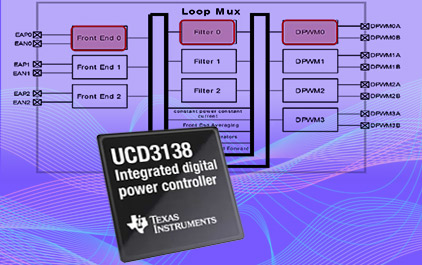
UCD3138 滤波器是具有许多针对 电源控制增强功能的 PID 滤波器。 它具有三个主要阶段 - 首先,PID 阶段; 其次,将三个 分支的输出 以及输出获取的饱和、 范围和钳制 加在一起。 最后阶段分为 两个部分, 它允许滤波器输出与 PWM 占空比和周期 相匹配。 在此,PID 阶段的 方框图具有位宽 信息。 请注意,在大多数情况下, 结果的精度 保留在 最高位 直至在滤波器输出时 进行舍入和钳制。 显示的所有值 均为带符号的数字 且最高有效位为 符号位。 所有值均当作 已标准化为正常值处理。 滤波器的主要输入是 来自误差 ADC 的 9 位带符号值。 它前往滤波器 计算的输入。 上一输入样本 作为整型和差动分支的 输入存储和使用。 滤波器输入 Xn 也会 转至数字限制比较器。 它允许非线性的 滤波器计算, 具有按 Xn 值 选择的 高达七个不同的系数集。 这可用于 更改具有不同 输入误差范围的 滤波器补偿。 Xn 值会 直接用作 滤波器的比例 分支的输入。 它将乘以 16 位 带符号 KI 系数。 24 位结果将用作 P 分支的输出。 在将两个带符号的 二进制数相乘时, 将生成额外的符号位。 因此,9 位乘以 16 位 将获得 24 个 有意义的位,而不是 25。 比例分支上 无需进行钳制。 它具有自我局限性, 因为它没有内存。 在积分器 输入中 Xn 的使用 有两个选项。 当前的 Xn 可供其自身使用。 或者,通过设置 KI 加法器模式位, 可将当前的 Xn 与 上一 Xn - 1相加。 Xn 的值,或者说 Xn + Xn - 1 的值, 将乘以 KI 系数。 此乘法运 算的输出 将始终满足 24 位的要求。 然后,该值会添加到 现有值。 硬件将在 24 位 带符号数字处 自动对其钳制。 并且,还有高和低 钳制寄存器, 可用于将该值 钳制为较低的值。 在差动分支上, 从 Xn 减去 Xn - 1。 然后,将结果 乘以系数 KD, 得出 24 位带符号数字。 差动分支 在此乘法后 添加了 额外的极, 提供了更多 滤波器响应控制, 以允许更好地 匹配电源。 此 D α 分支可 作为 D 分支 输出上的积分器。 每次滤波器计算中, 上一 D 和 D α 计算的 24 位结果 将乘以 9 位 K α。 这样将提供一个 32 位的 带符号结果。 要匹配 24 位 数据路径,必须 将其向下舍入 至 24 位。 这实际上是在 滤波器输出前 在滤波器中 发生的一次舍入。 此外,简单的钳制 还可防止 K 输出 超出 24 位带符号数字。 由于存在 α 阶段的 积分元素, 它可能会 超过该范围。 在此实验练习中,我们将仅使用 比例分支。 这是滤波器下一 阶段的方框图。 S0.23 标记法 表示一个24 位数字, 其中在二进制小数点左侧 有 1 位符号位,在小数点右侧 有 23 位。 首先,P、I 和 D 的 输出加在一起, 得出一个可能 出现的 26 位结果。 然后,饱和逻辑将该值 向下钳至 24 位。 饱和部分的 输出 将转至可编程 转换器, 可对其编程以实现 八个不同的转换,包括 完全无转换。 这可用于 滤波器系数 补偿。 扩展后,存在具有 独立高钳位值 和低钳位值的 钳制,这可 通过写入寄存器设置。 该钳制还具有 状态位,状态位 是在超出钳制 限制时设置的。 滤波器的最后阶段 将转换滤波器输出, 以匹配 DPWM 的 输入要求。 两个不同的 计算将使用 同一乘法器但不同的 设置按顺序执行。 该阶段将进行计算 以提供 DPWM 负载值。 该阶段开始时, PID 输出 将乘以多个 14 位 不带符号的数字之一, 提供一个 38 位结果。 对于滤波器 负载计算, 存在四个 可用的数字。 我们使用 PWM 周期, 从而滤波器输出将调制 DPWM0 的占空比。 乘法运算后将得出 一个38 位带符号的结果。 将负值 钳至零。 已移除符号位。 这样将提供一个 37 位的 正数结果。 该数已舍入至 18 个 最高有效位。 负载值钳制所用的值 来自滤波器输出 钳制高位寄存器和 滤波器输出钳制低位 寄存器中的值。 此后,DPWM 会将 滤波器负载值 用作时间值。 它将 14.4 位的 值视为低 4 位进入 DPWM 的 高分辨率部分。 因此,滤波器负载值的 分辨率是 250 ps。 这是输出阶段 部分的方框图, 它执行该计算以向 DPWM 周期提供值。 对于滤波器 周期计算, 在乘法阶段仅可 选择两个数字。 滤波器周期值 没有经过钳制。 DPWM 周期不 支持高分辨率。 所以,将从 18 位 结果中截去低 4 位。 滤波器周期仅向 DPWM 提供高 14 位, 提供 4 纳秒 分辨率。 在该实验练习中,我们将使 环路目前保持开环, 并使用 GUI HyperKnob 通过 PMBus 接口 经由 CPU 将值 反馈给滤波器。 因此,我们将滤波器 控制寄存器中称作 USE_CPU_SAMPLE 的 位设为 1。 然后,我们将 CPU_SAMPLE 设为滤波器的整个扩展 输入范围的 1/4。 请记住,滤波器 输入为 9 位。 最高有效位 是带符号位。 所以,满量程范围的 1/4 是 64。 对于滤波器负载 周期输出阶段, 我们将 DPWM 周期设为 输出的倍数, 从而滤波器将调制 PWM 周期的占空比。 然后,我们将在滤波器 控制寄存器中 设置局部滤波器启用位。 请注意,在 通过设置全局 启用寄存器中的 相关位, 将前端和 DPWM 模块全局启用前, 滤波器并未启用。
UCD3138 滤波器是具有许多针对 电源控制增强功能的 PID 滤波器。 它具有三个主要阶段 - 首先,PID 阶段; 其次,将三个 分支的输出 以及输出获取的饱和、 范围和钳制 加在一起。 最后阶段分为 两个部分, 它允许滤波器输出与 PWM 占空比和周期 相匹配。 在此,PID 阶段的 方框图具有位宽 信息。 请注意,在大多数情况下, 结果的精度 保留在 最高位 直至在滤波器输出时 进行舍入和钳制。 显示的所有值 均为带符号的数字 且最高有效位为 符号位。 所有值均当作 已标准化为正常值处理。 滤波器的主要输入是 来自误差 ADC 的 9 位带符号值。 它前往滤波器 计算的输入。 上一输入样本 作为整型和差动分支的 输入存储和使用。 滤波器输入 Xn 也会 转至数字限制比较器。 它允许非线性的 滤波器计算, 具有按 Xn 值 选择的 高达七个不同的系数集。 这可用于 更改具有不同 输入误差范围的 滤波器补偿。 Xn 值会 直接用作 滤波器的比例 分支的输入。 它将乘以 16 位 带符号 KI 系数。 24 位结果将用作 P 分支的输出。 在将两个带符号的 二进制数相乘时, 将生成额外的符号位。 因此,9 位乘以 16 位 将获得 24 个 有意义的位,而不是 25。 比例分支上 无需进行钳制。 它具有自我局限性, 因为它没有内存。 在积分器 输入中 Xn 的使用 有两个选项。 当前的 Xn 可供其自身使用。 或者,通过设置 KI 加法器模式位, 可将当前的 Xn 与 上一 Xn - 1相加。 Xn 的值,或者说 Xn + Xn - 1 的值, 将乘以 KI 系数。 此乘法运 算的输出 将始终满足 24 位的要求。 然后,该值会添加到 现有值。 硬件将在 24 位 带符号数字处 自动对其钳制。 并且,还有高和低 钳制寄存器, 可用于将该值 钳制为较低的值。 在差动分支上, 从 Xn 减去 Xn - 1。 然后,将结果 乘以系数 KD, 得出 24 位带符号数字。 差动分支 在此乘法后 添加了 额外的极, 提供了更多 滤波器响应控制, 以允许更好地 匹配电源。 此 D α 分支可 作为 D 分支 输出上的积分器。 每次滤波器计算中, 上一 D 和 D α 计算的 24 位结果 将乘以 9 位 K α。 这样将提供一个 32 位的 带符号结果。 要匹配 24 位 数据路径,必须 将其向下舍入 至 24 位。 这实际上是在 滤波器输出前 在滤波器中 发生的一次舍入。 此外,简单的钳制 还可防止 K 输出 超出 24 位带符号数字。 由于存在 α 阶段的 积分元素, 它可能会 超过该范围。 在此实验练习中,我们将仅使用 比例分支。 这是滤波器下一 阶段的方框图。 S0.23 标记法 表示一个24 位数字, 其中在二进制小数点左侧 有 1 位符号位,在小数点右侧 有 23 位。 首先,P、I 和 D 的 输出加在一起, 得出一个可能 出现的 26 位结果。 然后,饱和逻辑将该值 向下钳至 24 位。 饱和部分的 输出 将转至可编程 转换器, 可对其编程以实现 八个不同的转换,包括 完全无转换。 这可用于 滤波器系数 补偿。 扩展后,存在具有 独立高钳位值 和低钳位值的 钳制,这可 通过写入寄存器设置。 该钳制还具有 状态位,状态位 是在超出钳制 限制时设置的。 滤波器的最后阶段 将转换滤波器输出, 以匹配 DPWM 的 输入要求。 两个不同的 计算将使用 同一乘法器但不同的 设置按顺序执行。 该阶段将进行计算 以提供 DPWM 负载值。 该阶段开始时, PID 输出 将乘以多个 14 位 不带符号的数字之一, 提供一个 38 位结果。 对于滤波器 负载计算, 存在四个 可用的数字。 我们使用 PWM 周期, 从而滤波器输出将调制 DPWM0 的占空比。 乘法运算后将得出 一个38 位带符号的结果。 将负值 钳至零。 已移除符号位。 这样将提供一个 37 位的 正数结果。 该数已舍入至 18 个 最高有效位。 负载值钳制所用的值 来自滤波器输出 钳制高位寄存器和 滤波器输出钳制低位 寄存器中的值。 此后,DPWM 会将 滤波器负载值 用作时间值。 它将 14.4 位的 值视为低 4 位进入 DPWM 的 高分辨率部分。 因此,滤波器负载值的 分辨率是 250 ps。 这是输出阶段 部分的方框图, 它执行该计算以向 DPWM 周期提供值。 对于滤波器 周期计算, 在乘法阶段仅可 选择两个数字。 滤波器周期值 没有经过钳制。 DPWM 周期不 支持高分辨率。 所以,将从 18 位 结果中截去低 4 位。 滤波器周期仅向 DPWM 提供高 14 位, 提供 4 纳秒 分辨率。 在该实验练习中,我们将使 环路目前保持开环, 并使用 GUI HyperKnob 通过 PMBus 接口 经由 CPU 将值 反馈给滤波器。 因此,我们将滤波器 控制寄存器中称作 USE_CPU_SAMPLE 的 位设为 1。 然后,我们将 CPU_SAMPLE 设为滤波器的整个扩展 输入范围的 1/4。 请记住,滤波器 输入为 9 位。 最高有效位 是带符号位。 所以,满量程范围的 1/4 是 64。 对于滤波器负载 周期输出阶段, 我们将 DPWM 周期设为 输出的倍数, 从而滤波器将调制 PWM 周期的占空比。 然后,我们将在滤波器 控制寄存器中 设置局部滤波器启用位。 请注意,在 通过设置全局 启用寄存器中的 相关位, 将前端和 DPWM 模块全局启用前, 滤波器并未启用。
UCD3138 滤波器是具有许多针对 电源控制增强功能的
PID 滤波器。
它具有三个主要阶段 - 首先,PID 阶段;
其次,将三个 分支的输出
以及输出获取的饱和、 范围和钳制
加在一起。
最后阶段分为 两个部分,
它允许滤波器输出与 PWM 占空比和周期
相匹配。
在此,PID 阶段的 方框图具有位宽
信息。
请注意,在大多数情况下, 结果的精度
保留在 最高位
直至在滤波器输出时 进行舍入和钳制。
显示的所有值 均为带符号的数字
且最高有效位为 符号位。
所有值均当作 已标准化为正常值处理。
滤波器的主要输入是 来自误差 ADC 的
9 位带符号值。
它前往滤波器 计算的输入。
上一输入样本 作为整型和差动分支的
输入存储和使用。
滤波器输入 Xn 也会 转至数字限制比较器。
它允许非线性的 滤波器计算,
具有按 Xn 值 选择的
高达七个不同的系数集。
这可用于 更改具有不同
输入误差范围的 滤波器补偿。
Xn 值会 直接用作
滤波器的比例 分支的输入。
它将乘以 16 位 带符号 KI 系数。
24 位结果将用作 P 分支的输出。
在将两个带符号的 二进制数相乘时,
将生成额外的符号位。
因此,9 位乘以 16 位
将获得 24 个 有意义的位,而不是 25。
比例分支上 无需进行钳制。
它具有自我局限性, 因为它没有内存。
在积分器 输入中 Xn 的使用
有两个选项。
当前的 Xn 可供其自身使用。
或者,通过设置 KI 加法器模式位,
可将当前的 Xn 与 上一 Xn - 1相加。
Xn 的值,或者说 Xn + Xn - 1 的值,
将乘以 KI 系数。
此乘法运 算的输出
将始终满足 24 位的要求。
然后,该值会添加到 现有值。
硬件将在 24 位 带符号数字处
自动对其钳制。
并且,还有高和低 钳制寄存器,
可用于将该值 钳制为较低的值。
在差动分支上, 从 Xn 减去 Xn - 1。
然后,将结果 乘以系数 KD,
得出 24 位带符号数字。
差动分支 在此乘法后
添加了 额外的极,
提供了更多 滤波器响应控制,
以允许更好地 匹配电源。
此 D α 分支可 作为 D 分支
输出上的积分器。
每次滤波器计算中, 上一 D
和 D α 计算的 24 位结果
将乘以 9 位 K α。
这样将提供一个 32 位的 带符号结果。
要匹配 24 位 数据路径,必须
将其向下舍入 至 24 位。
这实际上是在 滤波器输出前
在滤波器中 发生的一次舍入。
此外,简单的钳制 还可防止 K 输出
超出 24 位带符号数字。
由于存在 α 阶段的 积分元素,
它可能会 超过该范围。
在此实验练习中,我们将仅使用 比例分支。
这是滤波器下一 阶段的方框图。
S0.23 标记法 表示一个24 位数字,
其中在二进制小数点左侧 有 1 位符号位,在小数点右侧
有 23 位。
首先,P、I 和 D 的 输出加在一起,
得出一个可能 出现的 26 位结果。
然后,饱和逻辑将该值 向下钳至 24 位。
饱和部分的 输出
将转至可编程 转换器,
可对其编程以实现 八个不同的转换,包括
完全无转换。
这可用于 滤波器系数
补偿。
扩展后,存在具有 独立高钳位值
和低钳位值的 钳制,这可
通过写入寄存器设置。
该钳制还具有 状态位,状态位
是在超出钳制 限制时设置的。
滤波器的最后阶段 将转换滤波器输出,
以匹配 DPWM 的 输入要求。
两个不同的 计算将使用
同一乘法器但不同的 设置按顺序执行。
该阶段将进行计算 以提供 DPWM 负载值。
该阶段开始时, PID 输出
将乘以多个 14 位 不带符号的数字之一,
提供一个 38 位结果。 对于滤波器 负载计算,
存在四个 可用的数字。
我们使用 PWM 周期, 从而滤波器输出将调制
DPWM0 的占空比。
乘法运算后将得出 一个38 位带符号的结果。
将负值 钳至零。
已移除符号位。
这样将提供一个 37 位的 正数结果。
该数已舍入至 18 个 最高有效位。
负载值钳制所用的值 来自滤波器输出
钳制高位寄存器和 滤波器输出钳制低位
寄存器中的值。
此后,DPWM 会将 滤波器负载值
用作时间值。
它将 14.4 位的 值视为低 4 位进入
DPWM 的 高分辨率部分。
因此,滤波器负载值的 分辨率是 250 ps。
这是输出阶段 部分的方框图,
它执行该计算以向 DPWM 周期提供值。
对于滤波器 周期计算,
在乘法阶段仅可 选择两个数字。
滤波器周期值 没有经过钳制。
DPWM 周期不 支持高分辨率。
所以,将从 18 位 结果中截去低 4 位。
滤波器周期仅向 DPWM 提供高 14 位,
提供 4 纳秒 分辨率。
在该实验练习中,我们将使 环路目前保持开环,
并使用 GUI HyperKnob 通过 PMBus 接口
经由 CPU 将值 反馈给滤波器。
因此,我们将滤波器 控制寄存器中称作 USE_CPU_SAMPLE 的
位设为 1。
然后,我们将 CPU_SAMPLE 设为滤波器的整个扩展
输入范围的 1/4。
请记住,滤波器 输入为 9 位。
最高有效位 是带符号位。
所以,满量程范围的 1/4 是 64。
对于滤波器负载 周期输出阶段,
我们将 DPWM 周期设为 输出的倍数,
从而滤波器将调制 PWM 周期的占空比。
然后,我们将在滤波器 控制寄存器中
设置局部滤波器启用位。
请注意,在 通过设置全局
启用寄存器中的 相关位,
将前端和 DPWM 模块全局启用前,
滤波器并未启用。
UCD3138 滤波器是具有许多针对 电源控制增强功能的 PID 滤波器。 它具有三个主要阶段 - 首先,PID 阶段; 其次,将三个 分支的输出 以及输出获取的饱和、 范围和钳制 加在一起。 最后阶段分为 两个部分, 它允许滤波器输出与 PWM 占空比和周期 相匹配。 在此,PID 阶段的 方框图具有位宽 信息。 请注意,在大多数情况下, 结果的精度 保留在 最高位 直至在滤波器输出时 进行舍入和钳制。 显示的所有值 均为带符号的数字 且最高有效位为 符号位。 所有值均当作 已标准化为正常值处理。 滤波器的主要输入是 来自误差 ADC 的 9 位带符号值。 它前往滤波器 计算的输入。 上一输入样本 作为整型和差动分支的 输入存储和使用。 滤波器输入 Xn 也会 转至数字限制比较器。 它允许非线性的 滤波器计算, 具有按 Xn 值 选择的 高达七个不同的系数集。 这可用于 更改具有不同 输入误差范围的 滤波器补偿。 Xn 值会 直接用作 滤波器的比例 分支的输入。 它将乘以 16 位 带符号 KI 系数。 24 位结果将用作 P 分支的输出。 在将两个带符号的 二进制数相乘时, 将生成额外的符号位。 因此,9 位乘以 16 位 将获得 24 个 有意义的位,而不是 25。 比例分支上 无需进行钳制。 它具有自我局限性, 因为它没有内存。 在积分器 输入中 Xn 的使用 有两个选项。 当前的 Xn 可供其自身使用。 或者,通过设置 KI 加法器模式位, 可将当前的 Xn 与 上一 Xn - 1相加。 Xn 的值,或者说 Xn + Xn - 1 的值, 将乘以 KI 系数。 此乘法运 算的输出 将始终满足 24 位的要求。 然后,该值会添加到 现有值。 硬件将在 24 位 带符号数字处 自动对其钳制。 并且,还有高和低 钳制寄存器, 可用于将该值 钳制为较低的值。 在差动分支上, 从 Xn 减去 Xn - 1。 然后,将结果 乘以系数 KD, 得出 24 位带符号数字。 差动分支 在此乘法后 添加了 额外的极, 提供了更多 滤波器响应控制, 以允许更好地 匹配电源。 此 D α 分支可 作为 D 分支 输出上的积分器。 每次滤波器计算中, 上一 D 和 D α 计算的 24 位结果 将乘以 9 位 K α。 这样将提供一个 32 位的 带符号结果。 要匹配 24 位 数据路径,必须 将其向下舍入 至 24 位。 这实际上是在 滤波器输出前 在滤波器中 发生的一次舍入。 此外,简单的钳制 还可防止 K 输出 超出 24 位带符号数字。 由于存在 α 阶段的 积分元素, 它可能会 超过该范围。 在此实验练习中,我们将仅使用 比例分支。 这是滤波器下一 阶段的方框图。 S0.23 标记法 表示一个24 位数字, 其中在二进制小数点左侧 有 1 位符号位,在小数点右侧 有 23 位。 首先,P、I 和 D 的 输出加在一起, 得出一个可能 出现的 26 位结果。 然后,饱和逻辑将该值 向下钳至 24 位。 饱和部分的 输出 将转至可编程 转换器, 可对其编程以实现 八个不同的转换,包括 完全无转换。 这可用于 滤波器系数 补偿。 扩展后,存在具有 独立高钳位值 和低钳位值的 钳制,这可 通过写入寄存器设置。 该钳制还具有 状态位,状态位 是在超出钳制 限制时设置的。 滤波器的最后阶段 将转换滤波器输出, 以匹配 DPWM 的 输入要求。 两个不同的 计算将使用 同一乘法器但不同的 设置按顺序执行。 该阶段将进行计算 以提供 DPWM 负载值。 该阶段开始时, PID 输出 将乘以多个 14 位 不带符号的数字之一, 提供一个 38 位结果。 对于滤波器 负载计算, 存在四个 可用的数字。 我们使用 PWM 周期, 从而滤波器输出将调制 DPWM0 的占空比。 乘法运算后将得出 一个38 位带符号的结果。 将负值 钳至零。 已移除符号位。 这样将提供一个 37 位的 正数结果。 该数已舍入至 18 个 最高有效位。 负载值钳制所用的值 来自滤波器输出 钳制高位寄存器和 滤波器输出钳制低位 寄存器中的值。 此后,DPWM 会将 滤波器负载值 用作时间值。 它将 14.4 位的 值视为低 4 位进入 DPWM 的 高分辨率部分。 因此,滤波器负载值的 分辨率是 250 ps。 这是输出阶段 部分的方框图, 它执行该计算以向 DPWM 周期提供值。 对于滤波器 周期计算, 在乘法阶段仅可 选择两个数字。 滤波器周期值 没有经过钳制。 DPWM 周期不 支持高分辨率。 所以,将从 18 位 结果中截去低 4 位。 滤波器周期仅向 DPWM 提供高 14 位, 提供 4 纳秒 分辨率。 在该实验练习中,我们将使 环路目前保持开环, 并使用 GUI HyperKnob 通过 PMBus 接口 经由 CPU 将值 反馈给滤波器。 因此,我们将滤波器 控制寄存器中称作 USE_CPU_SAMPLE 的 位设为 1。 然后,我们将 CPU_SAMPLE 设为滤波器的整个扩展 输入范围的 1/4。 请记住,滤波器 输入为 9 位。 最高有效位 是带符号位。 所以,满量程范围的 1/4 是 64。 对于滤波器负载 周期输出阶段, 我们将 DPWM 周期设为 输出的倍数, 从而滤波器将调制 PWM 周期的占空比。 然后,我们将在滤波器 控制寄存器中 设置局部滤波器启用位。 请注意,在 通过设置全局 启用寄存器中的 相关位, 将前端和 DPWM 模块全局启用前, 滤波器并未启用。
UCD3138 滤波器是具有许多针对 电源控制增强功能的
PID 滤波器。
它具有三个主要阶段 - 首先,PID 阶段;
其次,将三个 分支的输出
以及输出获取的饱和、 范围和钳制
加在一起。
最后阶段分为 两个部分,
它允许滤波器输出与 PWM 占空比和周期
相匹配。
在此,PID 阶段的 方框图具有位宽
信息。
请注意,在大多数情况下, 结果的精度
保留在 最高位
直至在滤波器输出时 进行舍入和钳制。
显示的所有值 均为带符号的数字
且最高有效位为 符号位。
所有值均当作 已标准化为正常值处理。
滤波器的主要输入是 来自误差 ADC 的
9 位带符号值。
它前往滤波器 计算的输入。
上一输入样本 作为整型和差动分支的
输入存储和使用。
滤波器输入 Xn 也会 转至数字限制比较器。
它允许非线性的 滤波器计算,
具有按 Xn 值 选择的
高达七个不同的系数集。
这可用于 更改具有不同
输入误差范围的 滤波器补偿。
Xn 值会 直接用作
滤波器的比例 分支的输入。
它将乘以 16 位 带符号 KI 系数。
24 位结果将用作 P 分支的输出。
在将两个带符号的 二进制数相乘时,
将生成额外的符号位。
因此,9 位乘以 16 位
将获得 24 个 有意义的位,而不是 25。
比例分支上 无需进行钳制。
它具有自我局限性, 因为它没有内存。
在积分器 输入中 Xn 的使用
有两个选项。
当前的 Xn 可供其自身使用。
或者,通过设置 KI 加法器模式位,
可将当前的 Xn 与 上一 Xn - 1相加。
Xn 的值,或者说 Xn + Xn - 1 的值,
将乘以 KI 系数。
此乘法运 算的输出
将始终满足 24 位的要求。
然后,该值会添加到 现有值。
硬件将在 24 位 带符号数字处
自动对其钳制。
并且,还有高和低 钳制寄存器,
可用于将该值 钳制为较低的值。
在差动分支上, 从 Xn 减去 Xn - 1。
然后,将结果 乘以系数 KD,
得出 24 位带符号数字。
差动分支 在此乘法后
添加了 额外的极,
提供了更多 滤波器响应控制,
以允许更好地 匹配电源。
此 D α 分支可 作为 D 分支
输出上的积分器。
每次滤波器计算中, 上一 D
和 D α 计算的 24 位结果
将乘以 9 位 K α。
这样将提供一个 32 位的 带符号结果。
要匹配 24 位 数据路径,必须
将其向下舍入 至 24 位。
这实际上是在 滤波器输出前
在滤波器中 发生的一次舍入。
此外,简单的钳制 还可防止 K 输出
超出 24 位带符号数字。
由于存在 α 阶段的 积分元素,
它可能会 超过该范围。
在此实验练习中,我们将仅使用 比例分支。
这是滤波器下一 阶段的方框图。
S0.23 标记法 表示一个24 位数字,
其中在二进制小数点左侧 有 1 位符号位,在小数点右侧
有 23 位。
首先,P、I 和 D 的 输出加在一起,
得出一个可能 出现的 26 位结果。
然后,饱和逻辑将该值 向下钳至 24 位。
饱和部分的 输出
将转至可编程 转换器,
可对其编程以实现 八个不同的转换,包括
完全无转换。
这可用于 滤波器系数
补偿。
扩展后,存在具有 独立高钳位值
和低钳位值的 钳制,这可
通过写入寄存器设置。
该钳制还具有 状态位,状态位
是在超出钳制 限制时设置的。
滤波器的最后阶段 将转换滤波器输出,
以匹配 DPWM 的 输入要求。
两个不同的 计算将使用
同一乘法器但不同的 设置按顺序执行。
该阶段将进行计算 以提供 DPWM 负载值。
该阶段开始时, PID 输出
将乘以多个 14 位 不带符号的数字之一,
提供一个 38 位结果。 对于滤波器 负载计算,
存在四个 可用的数字。
我们使用 PWM 周期, 从而滤波器输出将调制
DPWM0 的占空比。
乘法运算后将得出 一个38 位带符号的结果。
将负值 钳至零。
已移除符号位。
这样将提供一个 37 位的 正数结果。
该数已舍入至 18 个 最高有效位。
负载值钳制所用的值 来自滤波器输出
钳制高位寄存器和 滤波器输出钳制低位
寄存器中的值。
此后,DPWM 会将 滤波器负载值
用作时间值。
它将 14.4 位的 值视为低 4 位进入
DPWM 的 高分辨率部分。
因此,滤波器负载值的 分辨率是 250 ps。
这是输出阶段 部分的方框图,
它执行该计算以向 DPWM 周期提供值。
对于滤波器 周期计算,
在乘法阶段仅可 选择两个数字。
滤波器周期值 没有经过钳制。
DPWM 周期不 支持高分辨率。
所以,将从 18 位 结果中截去低 4 位。
滤波器周期仅向 DPWM 提供高 14 位,
提供 4 纳秒 分辨率。
在该实验练习中,我们将使 环路目前保持开环,
并使用 GUI HyperKnob 通过 PMBus 接口
经由 CPU 将值 反馈给滤波器。
因此,我们将滤波器 控制寄存器中称作 USE_CPU_SAMPLE 的
位设为 1。
然后,我们将 CPU_SAMPLE 设为滤波器的整个扩展
输入范围的 1/4。
请记住,滤波器 输入为 9 位。
最高有效位 是带符号位。
所以,满量程范围的 1/4 是 64。
对于滤波器负载 周期输出阶段,
我们将 DPWM 周期设为 输出的倍数,
从而滤波器将调制 PWM 周期的占空比。
然后,我们将在滤波器 控制寄存器中
设置局部滤波器启用位。
请注意,在 通过设置全局
启用寄存器中的 相关位,
将前端和 DPWM 模块全局启用前,
滤波器并未启用。
手机看
扫码用手机观看
 视频简介
视频简介
UCD3138数字滤波器模块:数字滤波器架构和操作概述
所属课程:UCD3138数字滤波器模块
发布时间:2019.03.11
视频集数:7
本节视频时长:00:12:57
该培训介绍了数字滤波器模块,该模块用作UCD3138系列器件提供的闭环系统中的补偿器。 该模块旨在取代基于模拟电源管理控制器IC的电源中使用的模拟补偿网络。



 未学习 UCD3138数字滤波器模块:数字滤波器模块简介
未学习 UCD3138数字滤波器模块:数字滤波器模块简介
 未学习 UCD3138数字滤波器模块:正常模式下DPWM操作概述
未学习 UCD3138数字滤波器模块:正常模式下DPWM操作概述
 未学习 UCD3138数字滤波器模块:数字滤波器架构和操作概述
未学习 UCD3138数字滤波器模块:数字滤波器架构和操作概述
 未学习 UCD3138数字滤波器模块:介绍环路复用器
未学习 UCD3138数字滤波器模块:介绍环路复用器
 未学习 UCD3138数字滤波器模块:本教程的编码任务
未学习 UCD3138数字滤波器模块:本教程的编码任务
 未学习 UCD3138数字滤波器模块:固件任务的解决方案
未学习 UCD3138数字滤波器模块:固件任务的解决方案
 未学习 UCD3138数字滤波器模块:避免直通
未学习 UCD3138数字滤波器模块:避免直通







