DesignDrive EVM板简介
Loading the player...
将在30s后自动为您播放下一课程
大家好 欢迎大家参加TI工业研讨会 我是 Ti century FAE Igor An 主要负责电机控制 和数字电源解决方案 下面一部分由我来给大家介绍 TI在电机位置控制系统中 有哪些芯片 算法 和成套方案可供大家选择 帮助大家推进项目开发 TI为了帮助大家更快的学习 测评 TI的芯片和解决方案 设计了一块DegisnDRIVEEVM板 这块EVM板上的一个主要功能 也是我们设计这块EVM板的 一个主要目的 是为了给大家提供一个方便的 评估平台 让大家去了解和测试TI所提供的 这种不用专用解码芯片 去对各种不同通讯协议 不同类型的位置 绝对位置 编码器的这种解码 那这部分解码工作 我们是用TI的C2000 用一种类似于软件的方式 去实现的数字解码 从而为大家在硬件成本上做出了节省 这部分也就是我们称之为 Position Manager的这部分功能 这块DesignDRIVE的EVM版的 设计初衷 是尽量的考虑到工业界常用的主流的 电流采样的方式和位置传感的方式 因为我们发现在工业界的 电机位置控制系统中 有多种的电流采样的方式 比如说上测电阻采样 霍尔采样 以及最近新出来的Delta Sigma采样 隔离的非隔离的 以及电流采样点的不同 三个下管的对地采样 以及三个线上的线上电流采样 同时对于位置传感器来说 种类就更加繁多 那像我们常见的这个光电编码盘 磁电编码盘 霍尔传感器 以及位置 以及绝对位置传感器的 各种不同的协议和旋转编码器等等 尤其是这个绝对位置传感器 旋转编码器这种 需要高精度 高响应速的这种绝对位置传感器 往往需要一颗独立的单独的解码芯片 将位置速度信息先解码 然后再传送给MCU 供MCU环路控制使用 那如此众多的这种传感器类型 及传感器位置 在一个项目开始之初 我们根据客户提出的项目要求 就是电机最终的响应各种速率的要求 各种精度的要求 那么如何评估用哪种传感器类型 能够实现这种系统的响应要求 我们需要一定的评估 评审 那用DesignDRIVE这块EVM板 就会非常快速方便的帮助大家 去评审各种不同的方案 来比较各种不同方案的不同的表现 从而评估是否能够 实现自己的设计目标 这就是C2000的 DesignDRIVE EVM板 在这个EVM板上我们配置了各种 不同的接口 后面我们会详细介绍 各种不同的接口及传感器位置 那它的功率部分 具有八安培的最大能力 可以最大支持到一马力的电机驱动 这里向大家展示的是这块EVM板的 主要功能框图 在这个功能框图上 我们主要去分为两大部分 一块是强电功率部分 一部分是弱电控制部分 那在各个部分之间 我们设置了不同的隔离带 那这个隔离带大家可以通过跳频 把隔离变成供地 所以这也是给大家提供了不同的 隔离的方案选择 让大家对不同隔离方案进行评估 那同时我们可以看到 在这个电流采样方面上 我们设置了不同的电流采样点 有Delta Sigma的这种采样 以及位置的各种采样 后续我们会针对每个各个环节 给大家进行详细的介绍 下面我们让大家直观地 感受一下整块EVM板的布局 在这块EVM板上我们可以看到 每个功能块的区分 在做PCB布板的时候 我们着重考虑了每个功能块 把每个功能块放在固定的位置 大家可以看这张图 图片上的各个区分 无线电压 无线电压过来 无线电压部分其实就是AC交流进来 经过整流桥 还有一些EMIC EMI的这个电路 高压调理过来之后 变成直流以后 我们经过一个低压调理电路 那就是把这个高压变成15伏 那之后是IPM 然后是我们的这个隔离 其实强电和弱电的这个隔离 然后第一个Control卡插槽 实际上是我们电机的 主控芯片的控制卡插槽 那它是完成电机控制算法的 主要MCU 然后就是各种不同的电流采样 第一个就是上侧电流采样 然后霍尔电流采样 Delta Sigma电流采样 那这几种电流采样 大家只要任选一种 就根据您的系统 配置 选一种电流采样作为反馈就可以了 然后上面这块的这个位置 就是我们的这个绝对位置编码器的 解码所需要的外围硬件电路的 各个硬件电路 然后最后就是我们两个 额外的这个Control卡插槽 主要是给大家 扩展用于功能安全以及通信使用 我们来更仔细地看position manager这一块电路 那其实每一个插槽 对应的就是一种协议的外围支持电路 我们可能会发现 每种协议对应的外围电路 好像支持电路很简单很少 而且貌似并没有独立的解码芯片 那其实这就是我们TI 为大家提供的一种低成本的解决方案 用低成本的外围支持电路 来支持每种芯片的解码单元 那其他复杂的解码算法 我们是通过 我们TI的C2000的芯片的 一些特性来实现的 下面我们为大家着重介绍 C2000的一些特性 帮助大家理解C2000如何去实现 多种不同绝对位置传感器的解码 并能够满足高速 高响应速度的这种系统要求 C2000芯片 我们都知道 它在电机控制领域 有着非常长的时间的应用 那从C2000的设计之初到现在 C2000一直专注于实时控制系统 简单的说也就是数字电源 和电机控制系统 那它的整个的设计 以及它的这个更新迭代 都是瞄准于这个 电机控制系统和数字电源系统的 各种应用和需求 那新一代的C2000它的这个升级 更加的贴切了 当今潮流以及 更先进的一代产品的这种 对MCU控制的这个要求 那现在我们介绍的这款C2000 它具有200兆的主频 那同时我们C2000 会有C28主核以及CLA的辅核 那我们最高的一个配置的芯片 是由两个C28的主核 两个CLA的辅核 那实际上相当于一个 4个200兆的计算单元 同时我们可以看到在C28组合里面 我们都会包含VCU TMU FPU这个硬件加速单元 那我们对VCU和FPU 相对比较熟悉 之前用过C2000的朋友们 会比较熟悉 那这个TMU是我们新一代 C2000集成进去的 叫三角函数加速器 那这个三角函数加速器 我们后面会详细的给大家介绍一下 它的性能 它主要是为了三角函数计算的 一个加速 它对我们的计算效率 有了非常大的提升 同时我们可以发现C28和CLA 现在都是浮点型的 那后面未来我们的计算 就再也不用被定标所苦恼 OK 那在我们C2000上 一如既往的 我们的PWM 这个单元的性能是非常强的 那我们现在新型的C2000 是所有通道 都支持高精度PWM 而且是成对的 可以AB有死区互补 自动发生机制的这种高精度PWM 那最多我们是有12个PWM模块 就是24路的PWM输出 那这个是要看您具体的芯片型号选型 同时有这个Trip zone 另外我们这个新型的C2000里面 我们会有一个XBAR的功能 它会在内部通过我们的配置 把某些管脚和其他的一些管脚 在内部进行短接 比如您的PWM输出管脚 我可以配置成和一个 capture管脚短接 那这样我就可以利用 capture的采集功能去检测 或者是监视PWM输出是否是正常 然后我们有多达16位和12位的 不同配置的ADC 然后还有八组的 Delta Sigma采样单元 这个Delta Sigma 其实是一个解调单元 还有KVP 那在这里面提到的position manager 实际上它可以理解是一个 软件库的功能 我们通过不同的软件库 来支持不同的通讯协议 像EnDat Biss Hiperface 然后最近我们这个 Release的Tamagawa 还有Resolver SinCos等等 这些不同的解码的算法 我们是通过一个 软件库的形式来实现的 那以及非常丰富的通讯接口 以及我们的powerline communication 的这种支持 同时有一个我们需要 给大家着重讲的 就是我们有个高速的串口单元 那它的通讯速率可以达到 100MPS 所以它的通讯速度是非常快的 甚至可以去和一些 实时控制系统的采样单元去进行通讯 另外我们position manager 所在的单元 那实际上是我们一个叫CLB单元 它可以理解为一个类似于 FPGA的一部分功能 它实际上是一个纯硬件的一部分功能 是集成在我们C2000的MCU里面 那这部分 是我们用这一部分的功能 来实现了position manager的解码 这就是可以解释 可以打消大家的疑虑 或者是给大家解释这个问题 为什么我们可以做到 绝对位置编码器的解码 能满足它的实时特性 同时这部分我们还可以为客户 开发一部分这种客户的客户代码 那下面这一张就是给大家着重介绍 我们的TMU加速单元 那实际上这是我们的一个 测试比对表 因为我们知道在数字电源 和电机控制系统中 有非常多的三角函数运算 像我们经常用的FOC 里面的CLARK PARK 这种三角函数变换 那之前我们比较苦恼的就是 它的这个运算一般都需要非常多的 CPU指定周期 像我们这里看到的 Current FPU Cycles 就是目前没有TMU加速的这些 做这些相应运算需要的cycle 那最夸张的是 [indiscernible]53个和90个周期 那如果有了TMU这个加速单元 我们可以看到它的指令周期4到5个 加速的非常明显
大家好 欢迎大家参加TI工业研讨会 我是 Ti century FAE Igor An 主要负责电机控制 和数字电源解决方案 下面一部分由我来给大家介绍 TI在电机位置控制系统中 有哪些芯片 算法 和成套方案可供大家选择 帮助大家推进项目开发 TI为了帮助大家更快的学习 测评 TI的芯片和解决方案 设计了一块DegisnDRIVEEVM板 这块EVM板上的一个主要功能 也是我们设计这块EVM板的 一个主要目的 是为了给大家提供一个方便的 评估平台 让大家去了解和测试TI所提供的 这种不用专用解码芯片 去对各种不同通讯协议 不同类型的位置 绝对位置 编码器的这种解码 那这部分解码工作 我们是用TI的C2000 用一种类似于软件的方式 去实现的数字解码 从而为大家在硬件成本上做出了节省 这部分也就是我们称之为 Position Manager的这部分功能 这块DesignDRIVE的EVM版的 设计初衷 是尽量的考虑到工业界常用的主流的 电流采样的方式和位置传感的方式 因为我们发现在工业界的 电机位置控制系统中 有多种的电流采样的方式 比如说上测电阻采样 霍尔采样 以及最近新出来的Delta Sigma采样 隔离的非隔离的 以及电流采样点的不同 三个下管的对地采样 以及三个线上的线上电流采样 同时对于位置传感器来说 种类就更加繁多 那像我们常见的这个光电编码盘 磁电编码盘 霍尔传感器 以及位置 以及绝对位置传感器的 各种不同的协议和旋转编码器等等 尤其是这个绝对位置传感器 旋转编码器这种 需要高精度 高响应速的这种绝对位置传感器 往往需要一颗独立的单独的解码芯片 将位置速度信息先解码 然后再传送给MCU 供MCU环路控制使用 那如此众多的这种传感器类型 及传感器位置 在一个项目开始之初 我们根据客户提出的项目要求 就是电机最终的响应各种速率的要求 各种精度的要求 那么如何评估用哪种传感器类型 能够实现这种系统的响应要求 我们需要一定的评估 评审 那用DesignDRIVE这块EVM板 就会非常快速方便的帮助大家 去评审各种不同的方案 来比较各种不同方案的不同的表现 从而评估是否能够 实现自己的设计目标 这就是C2000的 DesignDRIVE EVM板 在这个EVM板上我们配置了各种 不同的接口 后面我们会详细介绍 各种不同的接口及传感器位置 那它的功率部分 具有八安培的最大能力 可以最大支持到一马力的电机驱动 这里向大家展示的是这块EVM板的 主要功能框图 在这个功能框图上 我们主要去分为两大部分 一块是强电功率部分 一部分是弱电控制部分 那在各个部分之间 我们设置了不同的隔离带 那这个隔离带大家可以通过跳频 把隔离变成供地 所以这也是给大家提供了不同的 隔离的方案选择 让大家对不同隔离方案进行评估 那同时我们可以看到 在这个电流采样方面上 我们设置了不同的电流采样点 有Delta Sigma的这种采样 以及位置的各种采样 后续我们会针对每个各个环节 给大家进行详细的介绍 下面我们让大家直观地 感受一下整块EVM板的布局 在这块EVM板上我们可以看到 每个功能块的区分 在做PCB布板的时候 我们着重考虑了每个功能块 把每个功能块放在固定的位置 大家可以看这张图 图片上的各个区分 无线电压 无线电压过来 无线电压部分其实就是AC交流进来 经过整流桥 还有一些EMIC EMI的这个电路 高压调理过来之后 变成直流以后 我们经过一个低压调理电路 那就是把这个高压变成15伏 那之后是IPM 然后是我们的这个隔离 其实强电和弱电的这个隔离 然后第一个Control卡插槽 实际上是我们电机的 主控芯片的控制卡插槽 那它是完成电机控制算法的 主要MCU 然后就是各种不同的电流采样 第一个就是上侧电流采样 然后霍尔电流采样 Delta Sigma电流采样 那这几种电流采样 大家只要任选一种 就根据您的系统 配置 选一种电流采样作为反馈就可以了 然后上面这块的这个位置 就是我们的这个绝对位置编码器的 解码所需要的外围硬件电路的 各个硬件电路 然后最后就是我们两个 额外的这个Control卡插槽 主要是给大家 扩展用于功能安全以及通信使用 我们来更仔细地看position manager这一块电路 那其实每一个插槽 对应的就是一种协议的外围支持电路 我们可能会发现 每种协议对应的外围电路 好像支持电路很简单很少 而且貌似并没有独立的解码芯片 那其实这就是我们TI 为大家提供的一种低成本的解决方案 用低成本的外围支持电路 来支持每种芯片的解码单元 那其他复杂的解码算法 我们是通过 我们TI的C2000的芯片的 一些特性来实现的 下面我们为大家着重介绍 C2000的一些特性 帮助大家理解C2000如何去实现 多种不同绝对位置传感器的解码 并能够满足高速 高响应速度的这种系统要求 C2000芯片 我们都知道 它在电机控制领域 有着非常长的时间的应用 那从C2000的设计之初到现在 C2000一直专注于实时控制系统 简单的说也就是数字电源 和电机控制系统 那它的整个的设计 以及它的这个更新迭代 都是瞄准于这个 电机控制系统和数字电源系统的 各种应用和需求 那新一代的C2000它的这个升级 更加的贴切了 当今潮流以及 更先进的一代产品的这种 对MCU控制的这个要求 那现在我们介绍的这款C2000 它具有200兆的主频 那同时我们C2000 会有C28主核以及CLA的辅核 那我们最高的一个配置的芯片 是由两个C28的主核 两个CLA的辅核 那实际上相当于一个 4个200兆的计算单元 同时我们可以看到在C28组合里面 我们都会包含VCU TMU FPU这个硬件加速单元 那我们对VCU和FPU 相对比较熟悉 之前用过C2000的朋友们 会比较熟悉 那这个TMU是我们新一代 C2000集成进去的 叫三角函数加速器 那这个三角函数加速器 我们后面会详细的给大家介绍一下 它的性能 它主要是为了三角函数计算的 一个加速 它对我们的计算效率 有了非常大的提升 同时我们可以发现C28和CLA 现在都是浮点型的 那后面未来我们的计算 就再也不用被定标所苦恼 OK 那在我们C2000上 一如既往的 我们的PWM 这个单元的性能是非常强的 那我们现在新型的C2000 是所有通道 都支持高精度PWM 而且是成对的 可以AB有死区互补 自动发生机制的这种高精度PWM 那最多我们是有12个PWM模块 就是24路的PWM输出 那这个是要看您具体的芯片型号选型 同时有这个Trip zone 另外我们这个新型的C2000里面 我们会有一个XBAR的功能 它会在内部通过我们的配置 把某些管脚和其他的一些管脚 在内部进行短接 比如您的PWM输出管脚 我可以配置成和一个 capture管脚短接 那这样我就可以利用 capture的采集功能去检测 或者是监视PWM输出是否是正常 然后我们有多达16位和12位的 不同配置的ADC 然后还有八组的 Delta Sigma采样单元 这个Delta Sigma 其实是一个解调单元 还有KVP 那在这里面提到的position manager 实际上它可以理解是一个 软件库的功能 我们通过不同的软件库 来支持不同的通讯协议 像EnDat Biss Hiperface 然后最近我们这个 Release的Tamagawa 还有Resolver SinCos等等 这些不同的解码的算法 我们是通过一个 软件库的形式来实现的 那以及非常丰富的通讯接口 以及我们的powerline communication 的这种支持 同时有一个我们需要 给大家着重讲的 就是我们有个高速的串口单元 那它的通讯速率可以达到 100MPS 所以它的通讯速度是非常快的 甚至可以去和一些 实时控制系统的采样单元去进行通讯 另外我们position manager 所在的单元 那实际上是我们一个叫CLB单元 它可以理解为一个类似于 FPGA的一部分功能 它实际上是一个纯硬件的一部分功能 是集成在我们C2000的MCU里面 那这部分 是我们用这一部分的功能 来实现了position manager的解码 这就是可以解释 可以打消大家的疑虑 或者是给大家解释这个问题 为什么我们可以做到 绝对位置编码器的解码 能满足它的实时特性 同时这部分我们还可以为客户 开发一部分这种客户的客户代码 那下面这一张就是给大家着重介绍 我们的TMU加速单元 那实际上这是我们的一个 测试比对表 因为我们知道在数字电源 和电机控制系统中 有非常多的三角函数运算 像我们经常用的FOC 里面的CLARK PARK 这种三角函数变换 那之前我们比较苦恼的就是 它的这个运算一般都需要非常多的 CPU指定周期 像我们这里看到的 Current FPU Cycles 就是目前没有TMU加速的这些 做这些相应运算需要的cycle 那最夸张的是 [indiscernible]53个和90个周期 那如果有了TMU这个加速单元 我们可以看到它的指令周期4到5个 加速的非常明显
大家好
欢迎大家参加TI工业研讨会
我是 Ti century FAE Igor An 主要负责电机控制
和数字电源解决方案
下面一部分由我来给大家介绍
TI在电机位置控制系统中
有哪些芯片 算法
和成套方案可供大家选择
帮助大家推进项目开发
TI为了帮助大家更快的学习 测评
TI的芯片和解决方案
设计了一块DegisnDRIVEEVM板
这块EVM板上的一个主要功能
也是我们设计这块EVM板的
一个主要目的
是为了给大家提供一个方便的
评估平台
让大家去了解和测试TI所提供的
这种不用专用解码芯片
去对各种不同通讯协议
不同类型的位置 绝对位置
编码器的这种解码
那这部分解码工作
我们是用TI的C2000
用一种类似于软件的方式
去实现的数字解码
从而为大家在硬件成本上做出了节省
这部分也就是我们称之为 Position Manager的这部分功能
这块DesignDRIVE的EVM版的 设计初衷
是尽量的考虑到工业界常用的主流的
电流采样的方式和位置传感的方式
因为我们发现在工业界的
电机位置控制系统中
有多种的电流采样的方式
比如说上测电阻采样 霍尔采样
以及最近新出来的Delta Sigma采样
隔离的非隔离的
以及电流采样点的不同
三个下管的对地采样
以及三个线上的线上电流采样
同时对于位置传感器来说
种类就更加繁多
那像我们常见的这个光电编码盘
磁电编码盘 霍尔传感器
以及位置 以及绝对位置传感器的
各种不同的协议和旋转编码器等等
尤其是这个绝对位置传感器
旋转编码器这种
需要高精度
高响应速的这种绝对位置传感器
往往需要一颗独立的单独的解码芯片
将位置速度信息先解码
然后再传送给MCU
供MCU环路控制使用
那如此众多的这种传感器类型
及传感器位置
在一个项目开始之初
我们根据客户提出的项目要求
就是电机最终的响应各种速率的要求
各种精度的要求
那么如何评估用哪种传感器类型
能够实现这种系统的响应要求
我们需要一定的评估 评审
那用DesignDRIVE这块EVM板
就会非常快速方便的帮助大家
去评审各种不同的方案
来比较各种不同方案的不同的表现
从而评估是否能够
实现自己的设计目标
这就是C2000的 DesignDRIVE EVM板
在这个EVM板上我们配置了各种
不同的接口
后面我们会详细介绍
各种不同的接口及传感器位置
那它的功率部分
具有八安培的最大能力
可以最大支持到一马力的电机驱动
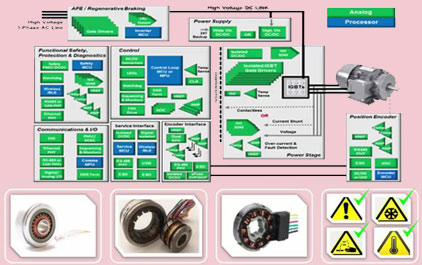
这里向大家展示的是这块EVM板的
主要功能框图
在这个功能框图上
我们主要去分为两大部分
一块是强电功率部分
一部分是弱电控制部分
那在各个部分之间
我们设置了不同的隔离带
那这个隔离带大家可以通过跳频
把隔离变成供地
所以这也是给大家提供了不同的
隔离的方案选择
让大家对不同隔离方案进行评估
那同时我们可以看到
在这个电流采样方面上
我们设置了不同的电流采样点
有Delta Sigma的这种采样
以及位置的各种采样
后续我们会针对每个各个环节
给大家进行详细的介绍
下面我们让大家直观地
感受一下整块EVM板的布局
在这块EVM板上我们可以看到
每个功能块的区分
在做PCB布板的时候
我们着重考虑了每个功能块
把每个功能块放在固定的位置
大家可以看这张图
图片上的各个区分
无线电压 无线电压过来
无线电压部分其实就是AC交流进来
经过整流桥
还有一些EMIC
EMI的这个电路
高压调理过来之后
变成直流以后
我们经过一个低压调理电路
那就是把这个高压变成15伏
那之后是IPM
然后是我们的这个隔离
其实强电和弱电的这个隔离
然后第一个Control卡插槽
实际上是我们电机的
主控芯片的控制卡插槽
那它是完成电机控制算法的
主要MCU
然后就是各种不同的电流采样
第一个就是上侧电流采样
然后霍尔电流采样
Delta Sigma电流采样
那这几种电流采样
大家只要任选一种
就根据您的系统 配置
选一种电流采样作为反馈就可以了
然后上面这块的这个位置
就是我们的这个绝对位置编码器的
解码所需要的外围硬件电路的
各个硬件电路
然后最后就是我们两个
额外的这个Control卡插槽
主要是给大家
扩展用于功能安全以及通信使用
我们来更仔细地看position manager这一块电路
那其实每一个插槽
对应的就是一种协议的外围支持电路
我们可能会发现
每种协议对应的外围电路
好像支持电路很简单很少
而且貌似并没有独立的解码芯片
那其实这就是我们TI
为大家提供的一种低成本的解决方案
用低成本的外围支持电路
来支持每种芯片的解码单元
那其他复杂的解码算法
我们是通过
我们TI的C2000的芯片的
一些特性来实现的
下面我们为大家着重介绍
C2000的一些特性
帮助大家理解C2000如何去实现
多种不同绝对位置传感器的解码
并能够满足高速
高响应速度的这种系统要求
C2000芯片
我们都知道 它在电机控制领域
有着非常长的时间的应用
那从C2000的设计之初到现在
C2000一直专注于实时控制系统
简单的说也就是数字电源
和电机控制系统
那它的整个的设计
以及它的这个更新迭代
都是瞄准于这个
电机控制系统和数字电源系统的
各种应用和需求
那新一代的C2000它的这个升级
更加的贴切了
当今潮流以及
更先进的一代产品的这种
对MCU控制的这个要求
那现在我们介绍的这款C2000
它具有200兆的主频
那同时我们C2000
会有C28主核以及CLA的辅核
那我们最高的一个配置的芯片
是由两个C28的主核
两个CLA的辅核
那实际上相当于一个
4个200兆的计算单元
同时我们可以看到在C28组合里面
我们都会包含VCU
TMU FPU这个硬件加速单元
那我们对VCU和FPU
相对比较熟悉
之前用过C2000的朋友们
会比较熟悉
那这个TMU是我们新一代
C2000集成进去的
叫三角函数加速器
那这个三角函数加速器
我们后面会详细的给大家介绍一下
它的性能
它主要是为了三角函数计算的
一个加速
它对我们的计算效率
有了非常大的提升
同时我们可以发现C28和CLA
现在都是浮点型的
那后面未来我们的计算
就再也不用被定标所苦恼
OK 那在我们C2000上
一如既往的
我们的PWM 这个单元的性能是非常强的
那我们现在新型的C2000
是所有通道
都支持高精度PWM
而且是成对的
可以AB有死区互补
自动发生机制的这种高精度PWM
那最多我们是有12个PWM模块
就是24路的PWM输出
那这个是要看您具体的芯片型号选型
同时有这个Trip zone
另外我们这个新型的C2000里面
我们会有一个XBAR的功能
它会在内部通过我们的配置
把某些管脚和其他的一些管脚
在内部进行短接
比如您的PWM输出管脚
我可以配置成和一个
capture管脚短接
那这样我就可以利用
capture的采集功能去检测
或者是监视PWM输出是否是正常
然后我们有多达16位和12位的
不同配置的ADC
然后还有八组的 Delta Sigma采样单元
这个Delta Sigma 其实是一个解调单元
还有KVP
那在这里面提到的position manager
实际上它可以理解是一个
软件库的功能
我们通过不同的软件库
来支持不同的通讯协议
像EnDat Biss Hiperface
然后最近我们这个 Release的Tamagawa
还有Resolver SinCos等等
这些不同的解码的算法
我们是通过一个
软件库的形式来实现的
那以及非常丰富的通讯接口
以及我们的powerline communication 的这种支持
同时有一个我们需要
给大家着重讲的
就是我们有个高速的串口单元
那它的通讯速率可以达到
100MPS
所以它的通讯速度是非常快的
甚至可以去和一些
实时控制系统的采样单元去进行通讯
另外我们position manager 所在的单元
那实际上是我们一个叫CLB单元
它可以理解为一个类似于
FPGA的一部分功能
它实际上是一个纯硬件的一部分功能
是集成在我们C2000的MCU里面
那这部分
是我们用这一部分的功能
来实现了position manager的解码
这就是可以解释
可以打消大家的疑虑
或者是给大家解释这个问题
为什么我们可以做到
绝对位置编码器的解码
能满足它的实时特性
同时这部分我们还可以为客户
开发一部分这种客户的客户代码
那下面这一张就是给大家着重介绍
我们的TMU加速单元
那实际上这是我们的一个
测试比对表
因为我们知道在数字电源
和电机控制系统中
有非常多的三角函数运算
像我们经常用的FOC 里面的CLARK PARK
这种三角函数变换
那之前我们比较苦恼的就是
它的这个运算一般都需要非常多的
CPU指定周期
像我们这里看到的 Current FPU Cycles
就是目前没有TMU加速的这些
做这些相应运算需要的cycle
那最夸张的是
[indiscernible]53个和90个周期
那如果有了TMU这个加速单元
我们可以看到它的指令周期4到5个
加速的非常明显
大家好 欢迎大家参加TI工业研讨会 我是 Ti century FAE Igor An 主要负责电机控制 和数字电源解决方案 下面一部分由我来给大家介绍 TI在电机位置控制系统中 有哪些芯片 算法 和成套方案可供大家选择 帮助大家推进项目开发 TI为了帮助大家更快的学习 测评 TI的芯片和解决方案 设计了一块DegisnDRIVEEVM板 这块EVM板上的一个主要功能 也是我们设计这块EVM板的 一个主要目的 是为了给大家提供一个方便的 评估平台 让大家去了解和测试TI所提供的 这种不用专用解码芯片 去对各种不同通讯协议 不同类型的位置 绝对位置 编码器的这种解码 那这部分解码工作 我们是用TI的C2000 用一种类似于软件的方式 去实现的数字解码 从而为大家在硬件成本上做出了节省 这部分也就是我们称之为 Position Manager的这部分功能 这块DesignDRIVE的EVM版的 设计初衷 是尽量的考虑到工业界常用的主流的 电流采样的方式和位置传感的方式 因为我们发现在工业界的 电机位置控制系统中 有多种的电流采样的方式 比如说上测电阻采样 霍尔采样 以及最近新出来的Delta Sigma采样 隔离的非隔离的 以及电流采样点的不同 三个下管的对地采样 以及三个线上的线上电流采样 同时对于位置传感器来说 种类就更加繁多 那像我们常见的这个光电编码盘 磁电编码盘 霍尔传感器 以及位置 以及绝对位置传感器的 各种不同的协议和旋转编码器等等 尤其是这个绝对位置传感器 旋转编码器这种 需要高精度 高响应速的这种绝对位置传感器 往往需要一颗独立的单独的解码芯片 将位置速度信息先解码 然后再传送给MCU 供MCU环路控制使用 那如此众多的这种传感器类型 及传感器位置 在一个项目开始之初 我们根据客户提出的项目要求 就是电机最终的响应各种速率的要求 各种精度的要求 那么如何评估用哪种传感器类型 能够实现这种系统的响应要求 我们需要一定的评估 评审 那用DesignDRIVE这块EVM板 就会非常快速方便的帮助大家 去评审各种不同的方案 来比较各种不同方案的不同的表现 从而评估是否能够 实现自己的设计目标 这就是C2000的 DesignDRIVE EVM板 在这个EVM板上我们配置了各种 不同的接口 后面我们会详细介绍 各种不同的接口及传感器位置 那它的功率部分 具有八安培的最大能力 可以最大支持到一马力的电机驱动 这里向大家展示的是这块EVM板的 主要功能框图 在这个功能框图上 我们主要去分为两大部分 一块是强电功率部分 一部分是弱电控制部分 那在各个部分之间 我们设置了不同的隔离带 那这个隔离带大家可以通过跳频 把隔离变成供地 所以这也是给大家提供了不同的 隔离的方案选择 让大家对不同隔离方案进行评估 那同时我们可以看到 在这个电流采样方面上 我们设置了不同的电流采样点 有Delta Sigma的这种采样 以及位置的各种采样 后续我们会针对每个各个环节 给大家进行详细的介绍 下面我们让大家直观地 感受一下整块EVM板的布局 在这块EVM板上我们可以看到 每个功能块的区分 在做PCB布板的时候 我们着重考虑了每个功能块 把每个功能块放在固定的位置 大家可以看这张图 图片上的各个区分 无线电压 无线电压过来 无线电压部分其实就是AC交流进来 经过整流桥 还有一些EMIC EMI的这个电路 高压调理过来之后 变成直流以后 我们经过一个低压调理电路 那就是把这个高压变成15伏 那之后是IPM 然后是我们的这个隔离 其实强电和弱电的这个隔离 然后第一个Control卡插槽 实际上是我们电机的 主控芯片的控制卡插槽 那它是完成电机控制算法的 主要MCU 然后就是各种不同的电流采样 第一个就是上侧电流采样 然后霍尔电流采样 Delta Sigma电流采样 那这几种电流采样 大家只要任选一种 就根据您的系统 配置 选一种电流采样作为反馈就可以了 然后上面这块的这个位置 就是我们的这个绝对位置编码器的 解码所需要的外围硬件电路的 各个硬件电路 然后最后就是我们两个 额外的这个Control卡插槽 主要是给大家 扩展用于功能安全以及通信使用 我们来更仔细地看position manager这一块电路 那其实每一个插槽 对应的就是一种协议的外围支持电路 我们可能会发现 每种协议对应的外围电路 好像支持电路很简单很少 而且貌似并没有独立的解码芯片 那其实这就是我们TI 为大家提供的一种低成本的解决方案 用低成本的外围支持电路 来支持每种芯片的解码单元 那其他复杂的解码算法 我们是通过 我们TI的C2000的芯片的 一些特性来实现的 下面我们为大家着重介绍 C2000的一些特性 帮助大家理解C2000如何去实现 多种不同绝对位置传感器的解码 并能够满足高速 高响应速度的这种系统要求 C2000芯片 我们都知道 它在电机控制领域 有着非常长的时间的应用 那从C2000的设计之初到现在 C2000一直专注于实时控制系统 简单的说也就是数字电源 和电机控制系统 那它的整个的设计 以及它的这个更新迭代 都是瞄准于这个 电机控制系统和数字电源系统的 各种应用和需求 那新一代的C2000它的这个升级 更加的贴切了 当今潮流以及 更先进的一代产品的这种 对MCU控制的这个要求 那现在我们介绍的这款C2000 它具有200兆的主频 那同时我们C2000 会有C28主核以及CLA的辅核 那我们最高的一个配置的芯片 是由两个C28的主核 两个CLA的辅核 那实际上相当于一个 4个200兆的计算单元 同时我们可以看到在C28组合里面 我们都会包含VCU TMU FPU这个硬件加速单元 那我们对VCU和FPU 相对比较熟悉 之前用过C2000的朋友们 会比较熟悉 那这个TMU是我们新一代 C2000集成进去的 叫三角函数加速器 那这个三角函数加速器 我们后面会详细的给大家介绍一下 它的性能 它主要是为了三角函数计算的 一个加速 它对我们的计算效率 有了非常大的提升 同时我们可以发现C28和CLA 现在都是浮点型的 那后面未来我们的计算 就再也不用被定标所苦恼 OK 那在我们C2000上 一如既往的 我们的PWM 这个单元的性能是非常强的 那我们现在新型的C2000 是所有通道 都支持高精度PWM 而且是成对的 可以AB有死区互补 自动发生机制的这种高精度PWM 那最多我们是有12个PWM模块 就是24路的PWM输出 那这个是要看您具体的芯片型号选型 同时有这个Trip zone 另外我们这个新型的C2000里面 我们会有一个XBAR的功能 它会在内部通过我们的配置 把某些管脚和其他的一些管脚 在内部进行短接 比如您的PWM输出管脚 我可以配置成和一个 capture管脚短接 那这样我就可以利用 capture的采集功能去检测 或者是监视PWM输出是否是正常 然后我们有多达16位和12位的 不同配置的ADC 然后还有八组的 Delta Sigma采样单元 这个Delta Sigma 其实是一个解调单元 还有KVP 那在这里面提到的position manager 实际上它可以理解是一个 软件库的功能 我们通过不同的软件库 来支持不同的通讯协议 像EnDat Biss Hiperface 然后最近我们这个 Release的Tamagawa 还有Resolver SinCos等等 这些不同的解码的算法 我们是通过一个 软件库的形式来实现的 那以及非常丰富的通讯接口 以及我们的powerline communication 的这种支持 同时有一个我们需要 给大家着重讲的 就是我们有个高速的串口单元 那它的通讯速率可以达到 100MPS 所以它的通讯速度是非常快的 甚至可以去和一些 实时控制系统的采样单元去进行通讯 另外我们position manager 所在的单元 那实际上是我们一个叫CLB单元 它可以理解为一个类似于 FPGA的一部分功能 它实际上是一个纯硬件的一部分功能 是集成在我们C2000的MCU里面 那这部分 是我们用这一部分的功能 来实现了position manager的解码 这就是可以解释 可以打消大家的疑虑 或者是给大家解释这个问题 为什么我们可以做到 绝对位置编码器的解码 能满足它的实时特性 同时这部分我们还可以为客户 开发一部分这种客户的客户代码 那下面这一张就是给大家着重介绍 我们的TMU加速单元 那实际上这是我们的一个 测试比对表 因为我们知道在数字电源 和电机控制系统中 有非常多的三角函数运算 像我们经常用的FOC 里面的CLARK PARK 这种三角函数变换 那之前我们比较苦恼的就是 它的这个运算一般都需要非常多的 CPU指定周期 像我们这里看到的 Current FPU Cycles 就是目前没有TMU加速的这些 做这些相应运算需要的cycle 那最夸张的是 [indiscernible]53个和90个周期 那如果有了TMU这个加速单元 我们可以看到它的指令周期4到5个 加速的非常明显
大家好
欢迎大家参加TI工业研讨会
我是 Ti century FAE Igor An 主要负责电机控制
和数字电源解决方案
下面一部分由我来给大家介绍
TI在电机位置控制系统中
有哪些芯片 算法
和成套方案可供大家选择
帮助大家推进项目开发
TI为了帮助大家更快的学习 测评
TI的芯片和解决方案
设计了一块DegisnDRIVEEVM板
这块EVM板上的一个主要功能
也是我们设计这块EVM板的
一个主要目的
是为了给大家提供一个方便的
评估平台
让大家去了解和测试TI所提供的
这种不用专用解码芯片
去对各种不同通讯协议
不同类型的位置 绝对位置
编码器的这种解码
那这部分解码工作
我们是用TI的C2000
用一种类似于软件的方式
去实现的数字解码
从而为大家在硬件成本上做出了节省
这部分也就是我们称之为 Position Manager的这部分功能
这块DesignDRIVE的EVM版的 设计初衷
是尽量的考虑到工业界常用的主流的
电流采样的方式和位置传感的方式
因为我们发现在工业界的
电机位置控制系统中
有多种的电流采样的方式
比如说上测电阻采样 霍尔采样
以及最近新出来的Delta Sigma采样
隔离的非隔离的
以及电流采样点的不同
三个下管的对地采样
以及三个线上的线上电流采样
同时对于位置传感器来说
种类就更加繁多
那像我们常见的这个光电编码盘
磁电编码盘 霍尔传感器
以及位置 以及绝对位置传感器的
各种不同的协议和旋转编码器等等
尤其是这个绝对位置传感器
旋转编码器这种
需要高精度
高响应速的这种绝对位置传感器
往往需要一颗独立的单独的解码芯片
将位置速度信息先解码
然后再传送给MCU
供MCU环路控制使用
那如此众多的这种传感器类型
及传感器位置
在一个项目开始之初
我们根据客户提出的项目要求
就是电机最终的响应各种速率的要求
各种精度的要求
那么如何评估用哪种传感器类型
能够实现这种系统的响应要求
我们需要一定的评估 评审
那用DesignDRIVE这块EVM板
就会非常快速方便的帮助大家
去评审各种不同的方案
来比较各种不同方案的不同的表现
从而评估是否能够
实现自己的设计目标
这就是C2000的 DesignDRIVE EVM板
在这个EVM板上我们配置了各种
不同的接口
后面我们会详细介绍
各种不同的接口及传感器位置
那它的功率部分
具有八安培的最大能力
可以最大支持到一马力的电机驱动
这里向大家展示的是这块EVM板的
主要功能框图
在这个功能框图上
我们主要去分为两大部分
一块是强电功率部分
一部分是弱电控制部分
那在各个部分之间
我们设置了不同的隔离带
那这个隔离带大家可以通过跳频
把隔离变成供地
所以这也是给大家提供了不同的
隔离的方案选择
让大家对不同隔离方案进行评估
那同时我们可以看到
在这个电流采样方面上
我们设置了不同的电流采样点
有Delta Sigma的这种采样
以及位置的各种采样
后续我们会针对每个各个环节
给大家进行详细的介绍
下面我们让大家直观地
感受一下整块EVM板的布局
在这块EVM板上我们可以看到
每个功能块的区分
在做PCB布板的时候
我们着重考虑了每个功能块
把每个功能块放在固定的位置
大家可以看这张图
图片上的各个区分
无线电压 无线电压过来
无线电压部分其实就是AC交流进来
经过整流桥
还有一些EMIC
EMI的这个电路
高压调理过来之后
变成直流以后
我们经过一个低压调理电路
那就是把这个高压变成15伏
那之后是IPM
然后是我们的这个隔离
其实强电和弱电的这个隔离
然后第一个Control卡插槽
实际上是我们电机的
主控芯片的控制卡插槽
那它是完成电机控制算法的
主要MCU
然后就是各种不同的电流采样
第一个就是上侧电流采样
然后霍尔电流采样
Delta Sigma电流采样
那这几种电流采样
大家只要任选一种
就根据您的系统 配置
选一种电流采样作为反馈就可以了
然后上面这块的这个位置
就是我们的这个绝对位置编码器的
解码所需要的外围硬件电路的
各个硬件电路
然后最后就是我们两个
额外的这个Control卡插槽
主要是给大家
扩展用于功能安全以及通信使用
我们来更仔细地看position manager这一块电路
那其实每一个插槽
对应的就是一种协议的外围支持电路
我们可能会发现
每种协议对应的外围电路
好像支持电路很简单很少
而且貌似并没有独立的解码芯片
那其实这就是我们TI
为大家提供的一种低成本的解决方案
用低成本的外围支持电路
来支持每种芯片的解码单元
那其他复杂的解码算法
我们是通过
我们TI的C2000的芯片的
一些特性来实现的
下面我们为大家着重介绍
C2000的一些特性
帮助大家理解C2000如何去实现
多种不同绝对位置传感器的解码
并能够满足高速
高响应速度的这种系统要求
C2000芯片
我们都知道 它在电机控制领域
有着非常长的时间的应用
那从C2000的设计之初到现在
C2000一直专注于实时控制系统
简单的说也就是数字电源
和电机控制系统
那它的整个的设计
以及它的这个更新迭代
都是瞄准于这个
电机控制系统和数字电源系统的
各种应用和需求
那新一代的C2000它的这个升级
更加的贴切了
当今潮流以及
更先进的一代产品的这种
对MCU控制的这个要求
那现在我们介绍的这款C2000
它具有200兆的主频
那同时我们C2000
会有C28主核以及CLA的辅核
那我们最高的一个配置的芯片
是由两个C28的主核
两个CLA的辅核
那实际上相当于一个
4个200兆的计算单元
同时我们可以看到在C28组合里面
我们都会包含VCU
TMU FPU这个硬件加速单元
那我们对VCU和FPU
相对比较熟悉
之前用过C2000的朋友们
会比较熟悉
那这个TMU是我们新一代
C2000集成进去的
叫三角函数加速器
那这个三角函数加速器
我们后面会详细的给大家介绍一下
它的性能
它主要是为了三角函数计算的
一个加速
它对我们的计算效率
有了非常大的提升
同时我们可以发现C28和CLA
现在都是浮点型的
那后面未来我们的计算
就再也不用被定标所苦恼
OK 那在我们C2000上
一如既往的
我们的PWM 这个单元的性能是非常强的
那我们现在新型的C2000
是所有通道
都支持高精度PWM
而且是成对的
可以AB有死区互补
自动发生机制的这种高精度PWM
那最多我们是有12个PWM模块
就是24路的PWM输出
那这个是要看您具体的芯片型号选型
同时有这个Trip zone
另外我们这个新型的C2000里面
我们会有一个XBAR的功能
它会在内部通过我们的配置
把某些管脚和其他的一些管脚
在内部进行短接
比如您的PWM输出管脚
我可以配置成和一个
capture管脚短接
那这样我就可以利用
capture的采集功能去检测
或者是监视PWM输出是否是正常
然后我们有多达16位和12位的
不同配置的ADC
然后还有八组的 Delta Sigma采样单元
这个Delta Sigma 其实是一个解调单元
还有KVP
那在这里面提到的position manager
实际上它可以理解是一个
软件库的功能
我们通过不同的软件库
来支持不同的通讯协议
像EnDat Biss Hiperface
然后最近我们这个 Release的Tamagawa
还有Resolver SinCos等等
这些不同的解码的算法
我们是通过一个
软件库的形式来实现的
那以及非常丰富的通讯接口
以及我们的powerline communication 的这种支持
同时有一个我们需要
给大家着重讲的
就是我们有个高速的串口单元
那它的通讯速率可以达到
100MPS
所以它的通讯速度是非常快的
甚至可以去和一些
实时控制系统的采样单元去进行通讯
另外我们position manager 所在的单元
那实际上是我们一个叫CLB单元
它可以理解为一个类似于
FPGA的一部分功能
它实际上是一个纯硬件的一部分功能
是集成在我们C2000的MCU里面
那这部分
是我们用这一部分的功能
来实现了position manager的解码
这就是可以解释
可以打消大家的疑虑
或者是给大家解释这个问题
为什么我们可以做到
绝对位置编码器的解码
能满足它的实时特性
同时这部分我们还可以为客户
开发一部分这种客户的客户代码
那下面这一张就是给大家着重介绍
我们的TMU加速单元
那实际上这是我们的一个
测试比对表
因为我们知道在数字电源
和电机控制系统中
有非常多的三角函数运算
像我们经常用的FOC 里面的CLARK PARK
这种三角函数变换
那之前我们比较苦恼的就是
它的这个运算一般都需要非常多的
CPU指定周期
像我们这里看到的 Current FPU Cycles
就是目前没有TMU加速的这些
做这些相应运算需要的cycle
那最夸张的是
[indiscernible]53个和90个周期
那如果有了TMU这个加速单元
我们可以看到它的指令周期4到5个
加速的非常明显
手机看
扫码用手机观看
 视频简介
视频简介
DesignDrive EVM板简介
所属课程:电机控制之旋变及位置反馈解决方案
发布时间:2017.05.04
视频集数:5
本节视频时长:00:13:08
TI旋变解码解决方案,及其他电机位置传感器解决方案介绍。



 未学习 电机驱动器及其位置反馈技术概览
未学习 电机驱动器及其位置反馈技术概览
 未学习 德州仪器PGA411旋变解决方案概览
未学习 德州仪器PGA411旋变解决方案概览
 未学习 DesignDrive EVM板简介
未学习 DesignDrive EVM板简介
 未学习 PositionManger介绍及旋转变压器软件解码介绍第一部分
未学习 PositionManger介绍及旋转变压器软件解码介绍第一部分
 未学习 旋转变压器软件解码方案介绍第二部分
未学习 旋转变压器软件解码方案介绍第二部分





