
电机驱动
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
电机驱动器及其位置反馈技术概览



大家好 欢迎大家参加德州仪器2017工业研讨会
我是德州仪器中国区业务拓展经理James Pang
今天由我和我的同事 德州仪器资深的
电气工程师 Igor An给大家
介绍一下德州仪器在工业电机驱动中的
旋变以及位置控制解决方案
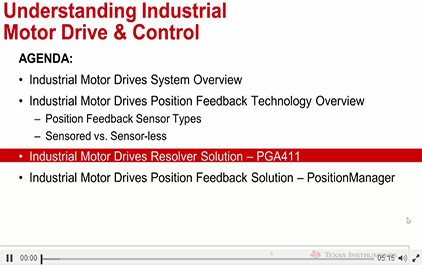
今天的内容分为四部分
第一部分是工业电机驱动系统概览
第二部分是工业电机驱动位置反馈技术概览
最三部分是德州仪器PGA411
旋变方案的介绍
第四部分是德州仪器电机驱动位置方案的介绍
我来给大家介绍第一部分至第三部分的内容
Igor会给大家介绍第四部分的内容
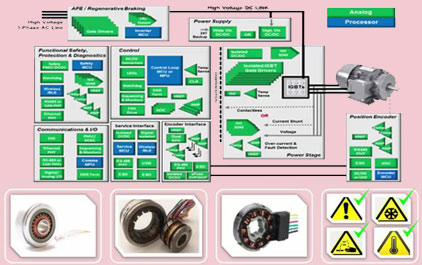
这是一张典型的工业电机驱动器的系统框图
除了控制通讯反馈
功率和电源模块外
该框图又进一步对相关模块进行了细分
例如反馈模块里面 我们细化了
电压电流采样
位置反馈 及
隔离等等 此外还增加了主动前端及能量回馈模块
以及针对IAC61508
ISO26262等
功能安全性模块
框图中的所有模块 里面都会用到
各种类型的模拟及处理器件
在此框图中 绿色的表示模拟器件
蓝色的表示处理器
器件的类型涉及到电源
始终 ADC DAC
隔离 运放 接口
FAN 单电机 以及处理器等等
我们会在后面的模块章节中为大家一一介绍
各个器件的具体应用
在介绍具体的功能模块前
我们进一步了解一下工业驱动器的
功能分区以及常用术语
首先我们可以把驱动器分为冷端和热端两个区域
冷热端驱动之间加一个隔离
冷端又可以分为通讯 应用
及控制三部分区域
通讯这里指的是现场总线
包括了低速的串循通讯
如UART CAT
SYC SPI
USB等等
还有标准的以太网
以及实时的以太网
如EtherCAT Profit Net
Sercos III等等
应用区域包含了应用装置
应用路径规划
在线电机参数识别
以及特定的应用程序
比如出错 保护
功能安全性
程序等等
控制区域包含了有机控制
电流环的控制
思想定向控制FC
甚至还包含了速度和位置环的控制
热端这边除了功率模块
电压电流采样
最重要的功能区域就是功能反馈
位置反馈又分成两大类
一类是可测量的
即有传感类
第二类是可估算的
即无传感类
有传感类又可以分为模拟和数字两大类
模拟类的如sin cos
旋变等等
数字类的有真亮质 编码器
绝对值编码器
如index
[听不清]以及[听不清]等等
现在我们来简单了解一下
电机位置反馈技术
这是常见的电机位置传感器类型
在数字输出输入的传感器
常用语方波控制
如果用于正玄波控制的话
需要对其结果进行差时处理
还有带模拟输出的Hall传感器
以及带有模拟输出的磁阻传感器
它们都可以通过sin cos的方式提供绝对位置
以上这三种传感器的精度并不够高
在工业电机传感器里面 我们需要精度更高
性能更可靠的位置传感器
比如旋变 增量式编码器
绝对值编码器等等
旋变能够提供绝对位置信号
耐用可靠
但接口比较复杂
需要额外的力磁信号
还要对其输出的结果进行结算
增量式编码器能够输出相对位置
并且能够输出比如4相式编码器的信号
或者输出sin cos的模拟信号
绝对值编码器可以提供高精度的绝对位置
和角度信息
不同的厂商呢 有不同的输出格式和协议
主要的标准协议呢 有Endat 2.2
Hyperface 等等
有传感和无传感的对比
有传感的方式 角度信息可以
从安装在电机轴上的机械电子
设备测量出来
无传感的方式 角度的信息可以通过
电机向电流 向电压
反向电动势
以及电机参数用软件算法估算出来
无传感的算法主要用于扭矩
或者速度的控制
其优点在于低成本 高可靠性
不受温湿度等环境因素的影响
但很少被用于运动控制器
及4伏驱动器
或者大功率的驱动器中
德州仪器在C2000的平台上提供
Insta SPIN-FOC 的无传感的解决方案
在本次工业研讨会中
我们会有另外一个专题 对其进行详细的概述
-
 未学习 电机驱动器及其位置反馈技术概览
未学习 电机驱动器及其位置反馈技术概览
-
 未学习 德州仪器PGA411旋变解决方案概览
未学习 德州仪器PGA411旋变解决方案概览
-
 未学习 DesignDrive EVM板简介
未学习 DesignDrive EVM板简介
-
 未学习 PositionManger介绍及旋转变压器软件解码介绍第一部分
未学习 PositionManger介绍及旋转变压器软件解码介绍第一部分
-
 未学习 旋转变压器软件解码方案介绍第二部分
未学习 旋转变压器软件解码方案介绍第二部分





