PositionManger介绍及旋转变压器软件解码介绍第一部分
Loading the player...
将在30s后自动为您播放下一课程
大家好 欢迎大家参加TI工业研讨会 我是TI Century FAE Igor An 主要负责电机控制 和数字电源解决方案 下面部分由我来给大家介绍 TI在电机位置控制系统中 有哪些芯片、算法 和成套方案可供大家选择 帮助大家推进项目开发 这里大家看到的 是C2000系列产品 对于功能安全方面的需求做出的考量 在新一代的C2000产品中 就是我们发布不久的07X系列 37X系列以及未来即将发布的 004X系列产品中 都引入了功能安全相关需求的考量 这样客户就可以 用C2000系列产品 对自己的产品进行功能安全的认证 那我们最高可以达到的认证等级是 ISO262的SOD的最高的安全等级 同时我们也会为客户 过认证提供相关必要的文件支持 像我们的safety manual FMEDA等等这些资料 TI有一个专门的safe TI的一个网页 就在TI.com上面有一个safe TI的网页 有非常丰富的TI 所能提供的功能安全 以及安全相关的 各方面的文件和软件支持 大家感兴趣可以到TI的官网查询 那我们在这里看到 就是我们 最新产品里面一个 37xD系列芯片的内部结构 那我们从内部结构上 它有非常多的重复外设 或者叫备份外设 一部分的考虑也是 为了实现安全功能的相关需求 同时我们所有的内存 Flash、RAM加寄存器 都有集成ECC的自动校验 还有这个功能 这也是功能方面 的必要的一个要求 前面一部分我为大家介绍了 Design Drive硬件电路板 的一些相关内容 同时还有一些和Position Manager 相关的C2000的一些特性 下面开始我们将着重介绍 Position Manager内部的 一些结构和相关软件 Position Manager正如前面 给大家介绍的 它是一个用类似于软件解码的方式 去替代传统的专用解码芯片 去解调各种绝对位置编码盘 还有旋转编码器 这类位置传感器的角度和位置信息 之所以讲它是类似于软件库的形式 只是大家用起来像是在烧一个软件库 实际上它真正的实现方式 我们之前在几页里面已经介绍了 它其实是类似于FEJ 的一部分的功能去实现的 因为它可以实现非常快的 计算速度和响应速度 保证我们的运算速度和精度 那我们Position Manager 从应用的solution的角度 它主要的优点就是 第一是我们可以节省 您非常多的开发时间 因为我们把这一部分功能 有TI的员工进行了设计 测试以及验证 节省了您的开发时间 同时由于节省了专用的解码芯片 让我们在硬件成本上做了节省 作为几个特定设计的软件库 我们对当前工业界应用的主流的 绝对位置传感器的 类型和通讯协议 进行了设计 那目前我们支持的 传感器类型和协议 主要是旋转编码器 resolver 还有sin、cos的传感器 QEP还有T-format就是 (听不清)的绝对位置传感器 BISS-C 还有EnDAT2.2 这些主流的传感器协议 我们外围电路加软件协议 解码 我们现在都是支持的 这些协议目前是在我们这个 F28379D、F28379S MCU上 进行测试和验证 这张表格向大家展示了 我们主要的 几种通讯协议的 测试条件和测试结果 一些的测试速率 像BISS-C我們只到5M 那传感器到 我们EVN板的这个线的 长度我们测试了100米 这个在很多应用中也是比较关键的 性能和指标 有一些应用场合中 绝对位置传感器 就是电机所处的位置 和控制板位置的距离 还是相对比较长的 在Position Manager所支持的 各种位置传感器的解码实现中 我们将为大家着重介绍 旋转编码器的解码实现 不同于Position Manager 所支持的其他 位置传感器的解码 旋转编码器的解码 并没有使用到COB的单元 就是我们之前提到的类似于 内嵌的MPJ功能单元 而它只是用到了 如我们下图所示的这个 一路DAC 两路ADC 就可以了 同时 我们已经 预编译好了一个运算库 这个运算库主要是 把采集进来的信号进行解码 从而得到实际电机的转子信息 所以理论上来讲 它可以平行移植到 C2000的任何芯片上 这里简单的介绍一下 旋转变压器的工作原理 在定子侧有两个垂直90度的线圈 在转子上和转子固定在一起 随着转子共同转动有一个线圈 在定子侧 我们 有一个激励信号 转子在旋转的时候 会感应到激励信号 同时包含了转子的位置信息 那我们在定子侧就可以看到 和转子位置信息相关的 正弦调整好的信号 那我们需要做的就是把这个 调制了高频调制信号的 角度信息提取出来 这就是我们Position Manager 或者是我们 旋转变压器的解码库 需要做的工作 在旋转变压器 到我们C2000之间 我们需要一个硬件调理电路 这也是我们之前 在Design Driver EVN板上所看到的 会需要有一个 硬件的外围支持电路 那它所实现的主要功能 主要是先把C2000发出的激励信号 传递给我们的旋转变压器 那这种传递一种 我们可能有频率的变化 另外可能有电压幅值上的变化 在一点就是 把旋转变压器反馈回来的 正弦sin、cos的信号 传递给C2000的AD短脚 这里我们知道 C2000的AD是0到3.3V 但正弦信号可能是有一个正负的 所以我们经过模拟前端的调理 可能要把加了一个 直流的offset在上面 能满足C2000的AD采样要求 那这部分呢 实际上是我们在Design Driver 这个EVN板的原理图上 截下来的一张图 Design Driver整个板的原理图 PCB、(听不清) 以及在这个EVN板上所跑的 跟Position Manager相关 和电机控制相关的参考代码 都是完全公开的 大家可以随时去TI的官网 下载ControlSUITE 其中有一个iddk的文件包 这些信息就是 完全open source公开给大家的 大家随时可以去下载去看 从这个电路上我们看出 这一部分就是我们的激励信号 所要用的电路 下面就是sin、cos 两路的采样信号 同时我们造了一个1.6V的上拉 来保证我们sin、cos 有一个直流偏置 来满足0到3.3V的采样要求 从这个电路上来看 它要求的外围 这个电路非常简单 这也是从侧面印证了 我们刚才所说的 和用专用芯片去解码相比 我们这套旋转变压器的解码方案 它的硬件成本上大大做出了节省 那次是我们可能会有 另外一个疑问产生出来 就是我这个硬件成本节省了 那它的性能会不会受到影响 下面几页我们会针对这个问题 给大家详细介绍一下我们是如何 用软件的方式 去实现旋转变压器的解码 让大家对我们整个方案 有一个更加深入的认识 从而帮助大家更好的 去评估和分析这套方案 尤其是去评估它的性能 和专用解码芯片相比 有哪些它自己独特的地方 从而帮助您更好的评估和选择 不同的方案
大家好 欢迎大家参加TI工业研讨会 我是TI Century FAE Igor An 主要负责电机控制 和数字电源解决方案 下面部分由我来给大家介绍 TI在电机位置控制系统中 有哪些芯片、算法 和成套方案可供大家选择 帮助大家推进项目开发 这里大家看到的 是C2000系列产品 对于功能安全方面的需求做出的考量 在新一代的C2000产品中 就是我们发布不久的07X系列 37X系列以及未来即将发布的 004X系列产品中 都引入了功能安全相关需求的考量 这样客户就可以 用C2000系列产品 对自己的产品进行功能安全的认证 那我们最高可以达到的认证等级是 ISO262的SOD的最高的安全等级 同时我们也会为客户 过认证提供相关必要的文件支持 像我们的safety manual FMEDA等等这些资料 TI有一个专门的safe TI的一个网页 就在TI.com上面有一个safe TI的网页 有非常丰富的TI 所能提供的功能安全 以及安全相关的 各方面的文件和软件支持 大家感兴趣可以到TI的官网查询 那我们在这里看到 就是我们 最新产品里面一个 37xD系列芯片的内部结构 那我们从内部结构上 它有非常多的重复外设 或者叫备份外设 一部分的考虑也是 为了实现安全功能的相关需求 同时我们所有的内存 Flash、RAM加寄存器 都有集成ECC的自动校验 还有这个功能 这也是功能方面 的必要的一个要求 前面一部分我为大家介绍了 Design Drive硬件电路板 的一些相关内容 同时还有一些和Position Manager 相关的C2000的一些特性 下面开始我们将着重介绍 Position Manager内部的 一些结构和相关软件 Position Manager正如前面 给大家介绍的 它是一个用类似于软件解码的方式 去替代传统的专用解码芯片 去解调各种绝对位置编码盘 还有旋转编码器 这类位置传感器的角度和位置信息 之所以讲它是类似于软件库的形式 只是大家用起来像是在烧一个软件库 实际上它真正的实现方式 我们之前在几页里面已经介绍了 它其实是类似于FEJ 的一部分的功能去实现的 因为它可以实现非常快的 计算速度和响应速度 保证我们的运算速度和精度 那我们Position Manager 从应用的solution的角度 它主要的优点就是 第一是我们可以节省 您非常多的开发时间 因为我们把这一部分功能 有TI的员工进行了设计 测试以及验证 节省了您的开发时间 同时由于节省了专用的解码芯片 让我们在硬件成本上做了节省 作为几个特定设计的软件库 我们对当前工业界应用的主流的 绝对位置传感器的 类型和通讯协议 进行了设计 那目前我们支持的 传感器类型和协议 主要是旋转编码器 resolver 还有sin、cos的传感器 QEP还有T-format就是 (听不清)的绝对位置传感器 BISS-C 还有EnDAT2.2 这些主流的传感器协议 我们外围电路加软件协议 解码 我们现在都是支持的 这些协议目前是在我们这个 F28379D、F28379S MCU上 进行测试和验证 这张表格向大家展示了 我们主要的 几种通讯协议的 测试条件和测试结果 一些的测试速率 像BISS-C我們只到5M 那传感器到 我们EVN板的这个线的 长度我们测试了100米 这个在很多应用中也是比较关键的 性能和指标 有一些应用场合中 绝对位置传感器 就是电机所处的位置 和控制板位置的距离 还是相对比较长的 在Position Manager所支持的 各种位置传感器的解码实现中 我们将为大家着重介绍 旋转编码器的解码实现 不同于Position Manager 所支持的其他 位置传感器的解码 旋转编码器的解码 并没有使用到COB的单元 就是我们之前提到的类似于 内嵌的MPJ功能单元 而它只是用到了 如我们下图所示的这个 一路DAC 两路ADC 就可以了 同时 我们已经 预编译好了一个运算库 这个运算库主要是 把采集进来的信号进行解码 从而得到实际电机的转子信息 所以理论上来讲 它可以平行移植到 C2000的任何芯片上 这里简单的介绍一下 旋转变压器的工作原理 在定子侧有两个垂直90度的线圈 在转子上和转子固定在一起 随着转子共同转动有一个线圈 在定子侧 我们 有一个激励信号 转子在旋转的时候 会感应到激励信号 同时包含了转子的位置信息 那我们在定子侧就可以看到 和转子位置信息相关的 正弦调整好的信号 那我们需要做的就是把这个 调制了高频调制信号的 角度信息提取出来 这就是我们Position Manager 或者是我们 旋转变压器的解码库 需要做的工作 在旋转变压器 到我们C2000之间 我们需要一个硬件调理电路 这也是我们之前 在Design Driver EVN板上所看到的 会需要有一个 硬件的外围支持电路 那它所实现的主要功能 主要是先把C2000发出的激励信号 传递给我们的旋转变压器 那这种传递一种 我们可能有频率的变化 另外可能有电压幅值上的变化 在一点就是 把旋转变压器反馈回来的 正弦sin、cos的信号 传递给C2000的AD短脚 这里我们知道 C2000的AD是0到3.3V 但正弦信号可能是有一个正负的 所以我们经过模拟前端的调理 可能要把加了一个 直流的offset在上面 能满足C2000的AD采样要求 那这部分呢 实际上是我们在Design Driver 这个EVN板的原理图上 截下来的一张图 Design Driver整个板的原理图 PCB、(听不清) 以及在这个EVN板上所跑的 跟Position Manager相关 和电机控制相关的参考代码 都是完全公开的 大家可以随时去TI的官网 下载ControlSUITE 其中有一个iddk的文件包 这些信息就是 完全open source公开给大家的 大家随时可以去下载去看 从这个电路上我们看出 这一部分就是我们的激励信号 所要用的电路 下面就是sin、cos 两路的采样信号 同时我们造了一个1.6V的上拉 来保证我们sin、cos 有一个直流偏置 来满足0到3.3V的采样要求 从这个电路上来看 它要求的外围 这个电路非常简单 这也是从侧面印证了 我们刚才所说的 和用专用芯片去解码相比 我们这套旋转变压器的解码方案 它的硬件成本上大大做出了节省 那次是我们可能会有 另外一个疑问产生出来 就是我这个硬件成本节省了 那它的性能会不会受到影响 下面几页我们会针对这个问题 给大家详细介绍一下我们是如何 用软件的方式 去实现旋转变压器的解码 让大家对我们整个方案 有一个更加深入的认识 从而帮助大家更好的 去评估和分析这套方案 尤其是去评估它的性能 和专用解码芯片相比 有哪些它自己独特的地方 从而帮助您更好的评估和选择 不同的方案
大家好 欢迎大家参加TI工业研讨会
我是TI Century FAE Igor An
主要负责电机控制 和数字电源解决方案
下面部分由我来给大家介绍
TI在电机位置控制系统中 有哪些芯片、算法
和成套方案可供大家选择
帮助大家推进项目开发
这里大家看到的
是C2000系列产品
对于功能安全方面的需求做出的考量
在新一代的C2000产品中
就是我们发布不久的07X系列
37X系列以及未来即将发布的 004X系列产品中
都引入了功能安全相关需求的考量
这样客户就可以 用C2000系列产品
对自己的产品进行功能安全的认证
那我们最高可以达到的认证等级是
ISO262的SOD的最高的安全等级
同时我们也会为客户 过认证提供相关必要的文件支持
像我们的safety manual
FMEDA等等这些资料
TI有一个专门的safe TI的一个网页
就在TI.com上面有一个safe TI的网页
有非常丰富的TI 所能提供的功能安全
以及安全相关的 各方面的文件和软件支持
大家感兴趣可以到TI的官网查询
那我们在这里看到 就是我们
最新产品里面一个 37xD系列芯片的内部结构
那我们从内部结构上
它有非常多的重复外设
或者叫备份外设
一部分的考虑也是 为了实现安全功能的相关需求
同时我们所有的内存
Flash、RAM加寄存器
都有集成ECC的自动校验
还有这个功能
这也是功能方面 的必要的一个要求
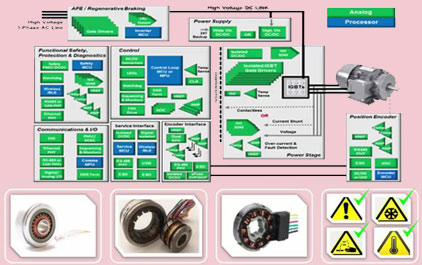
前面一部分我为大家介绍了
Design Drive硬件电路板 的一些相关内容
同时还有一些和Position Manager 相关的C2000的一些特性
下面开始我们将着重介绍
Position Manager内部的 一些结构和相关软件
Position Manager正如前面 给大家介绍的
它是一个用类似于软件解码的方式
去替代传统的专用解码芯片
去解调各种绝对位置编码盘
还有旋转编码器
这类位置传感器的角度和位置信息
之所以讲它是类似于软件库的形式
只是大家用起来像是在烧一个软件库
实际上它真正的实现方式
我们之前在几页里面已经介绍了
它其实是类似于FEJ 的一部分的功能去实现的
因为它可以实现非常快的 计算速度和响应速度
保证我们的运算速度和精度
那我们Position Manager 从应用的solution的角度
它主要的优点就是
第一是我们可以节省 您非常多的开发时间
因为我们把这一部分功能
有TI的员工进行了设计 测试以及验证
节省了您的开发时间
同时由于节省了专用的解码芯片
让我们在硬件成本上做了节省
作为几个特定设计的软件库
我们对当前工业界应用的主流的
绝对位置传感器的 类型和通讯协议
进行了设计
那目前我们支持的 传感器类型和协议
主要是旋转编码器
resolver 还有sin、cos的传感器
QEP还有T-format就是 (听不清)的绝对位置传感器
BISS-C 还有EnDAT2.2
这些主流的传感器协议
我们外围电路加软件协议
解码 我们现在都是支持的
这些协议目前是在我们这个
F28379D、F28379S MCU上 进行测试和验证
这张表格向大家展示了 我们主要的
几种通讯协议的 测试条件和测试结果
一些的测试速率
像BISS-C我們只到5M
那传感器到 我们EVN板的这个线的
长度我们测试了100米
这个在很多应用中也是比较关键的
性能和指标
有一些应用场合中
绝对位置传感器 就是电机所处的位置
和控制板位置的距离 还是相对比较长的
在Position Manager所支持的 各种位置传感器的解码实现中
我们将为大家着重介绍 旋转编码器的解码实现
不同于Position Manager 所支持的其他
位置传感器的解码
旋转编码器的解码
并没有使用到COB的单元
就是我们之前提到的类似于
内嵌的MPJ功能单元
而它只是用到了
如我们下图所示的这个
一路DAC 两路ADC
就可以了
同时 我们已经 预编译好了一个运算库
这个运算库主要是 把采集进来的信号进行解码
从而得到实际电机的转子信息
所以理论上来讲
它可以平行移植到 C2000的任何芯片上
这里简单的介绍一下
旋转变压器的工作原理
在定子侧有两个垂直90度的线圈
在转子上和转子固定在一起
随着转子共同转动有一个线圈
在定子侧 我们
有一个激励信号
转子在旋转的时候
会感应到激励信号
同时包含了转子的位置信息
那我们在定子侧就可以看到
和转子位置信息相关的 正弦调整好的信号
那我们需要做的就是把这个
调制了高频调制信号的 角度信息提取出来
这就是我们Position Manager 或者是我们
旋转变压器的解码库
需要做的工作
在旋转变压器 到我们C2000之间
我们需要一个硬件调理电路
这也是我们之前 在Design Driver EVN板上所看到的
会需要有一个 硬件的外围支持电路
那它所实现的主要功能
主要是先把C2000发出的激励信号
传递给我们的旋转变压器
那这种传递一种 我们可能有频率的变化
另外可能有电压幅值上的变化
在一点就是 把旋转变压器反馈回来的
正弦sin、cos的信号
传递给C2000的AD短脚
这里我们知道 C2000的AD是0到3.3V
但正弦信号可能是有一个正负的
所以我们经过模拟前端的调理
可能要把加了一个 直流的offset在上面
能满足C2000的AD采样要求
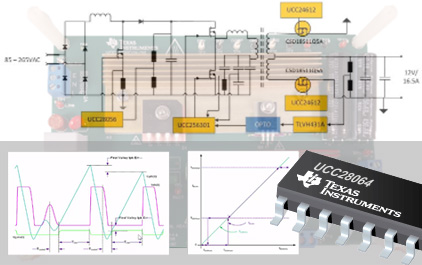
那这部分呢
实际上是我们在Design Driver 这个EVN板的原理图上
截下来的一张图
Design Driver整个板的原理图
PCB、(听不清) 以及在这个EVN板上所跑的
跟Position Manager相关 和电机控制相关的参考代码
都是完全公开的
大家可以随时去TI的官网 下载ControlSUITE
其中有一个iddk的文件包
这些信息就是 完全open source公开给大家的
大家随时可以去下载去看
从这个电路上我们看出
这一部分就是我们的激励信号
所要用的电路
下面就是sin、cos 两路的采样信号
同时我们造了一个1.6V的上拉
来保证我们sin、cos 有一个直流偏置
来满足0到3.3V的采样要求
从这个电路上来看
它要求的外围 这个电路非常简单
这也是从侧面印证了
我们刚才所说的
和用专用芯片去解码相比
我们这套旋转变压器的解码方案
它的硬件成本上大大做出了节省
那次是我们可能会有 另外一个疑问产生出来
就是我这个硬件成本节省了
那它的性能会不会受到影响
下面几页我们会针对这个问题
给大家详细介绍一下我们是如何
用软件的方式 去实现旋转变压器的解码
让大家对我们整个方案
有一个更加深入的认识
从而帮助大家更好的 去评估和分析这套方案
尤其是去评估它的性能
和专用解码芯片相比
有哪些它自己独特的地方
从而帮助您更好的评估和选择
不同的方案
大家好 欢迎大家参加TI工业研讨会 我是TI Century FAE Igor An 主要负责电机控制 和数字电源解决方案 下面部分由我来给大家介绍 TI在电机位置控制系统中 有哪些芯片、算法 和成套方案可供大家选择 帮助大家推进项目开发 这里大家看到的 是C2000系列产品 对于功能安全方面的需求做出的考量 在新一代的C2000产品中 就是我们发布不久的07X系列 37X系列以及未来即将发布的 004X系列产品中 都引入了功能安全相关需求的考量 这样客户就可以 用C2000系列产品 对自己的产品进行功能安全的认证 那我们最高可以达到的认证等级是 ISO262的SOD的最高的安全等级 同时我们也会为客户 过认证提供相关必要的文件支持 像我们的safety manual FMEDA等等这些资料 TI有一个专门的safe TI的一个网页 就在TI.com上面有一个safe TI的网页 有非常丰富的TI 所能提供的功能安全 以及安全相关的 各方面的文件和软件支持 大家感兴趣可以到TI的官网查询 那我们在这里看到 就是我们 最新产品里面一个 37xD系列芯片的内部结构 那我们从内部结构上 它有非常多的重复外设 或者叫备份外设 一部分的考虑也是 为了实现安全功能的相关需求 同时我们所有的内存 Flash、RAM加寄存器 都有集成ECC的自动校验 还有这个功能 这也是功能方面 的必要的一个要求 前面一部分我为大家介绍了 Design Drive硬件电路板 的一些相关内容 同时还有一些和Position Manager 相关的C2000的一些特性 下面开始我们将着重介绍 Position Manager内部的 一些结构和相关软件 Position Manager正如前面 给大家介绍的 它是一个用类似于软件解码的方式 去替代传统的专用解码芯片 去解调各种绝对位置编码盘 还有旋转编码器 这类位置传感器的角度和位置信息 之所以讲它是类似于软件库的形式 只是大家用起来像是在烧一个软件库 实际上它真正的实现方式 我们之前在几页里面已经介绍了 它其实是类似于FEJ 的一部分的功能去实现的 因为它可以实现非常快的 计算速度和响应速度 保证我们的运算速度和精度 那我们Position Manager 从应用的solution的角度 它主要的优点就是 第一是我们可以节省 您非常多的开发时间 因为我们把这一部分功能 有TI的员工进行了设计 测试以及验证 节省了您的开发时间 同时由于节省了专用的解码芯片 让我们在硬件成本上做了节省 作为几个特定设计的软件库 我们对当前工业界应用的主流的 绝对位置传感器的 类型和通讯协议 进行了设计 那目前我们支持的 传感器类型和协议 主要是旋转编码器 resolver 还有sin、cos的传感器 QEP还有T-format就是 (听不清)的绝对位置传感器 BISS-C 还有EnDAT2.2 这些主流的传感器协议 我们外围电路加软件协议 解码 我们现在都是支持的 这些协议目前是在我们这个 F28379D、F28379S MCU上 进行测试和验证 这张表格向大家展示了 我们主要的 几种通讯协议的 测试条件和测试结果 一些的测试速率 像BISS-C我們只到5M 那传感器到 我们EVN板的这个线的 长度我们测试了100米 这个在很多应用中也是比较关键的 性能和指标 有一些应用场合中 绝对位置传感器 就是电机所处的位置 和控制板位置的距离 还是相对比较长的 在Position Manager所支持的 各种位置传感器的解码实现中 我们将为大家着重介绍 旋转编码器的解码实现 不同于Position Manager 所支持的其他 位置传感器的解码 旋转编码器的解码 并没有使用到COB的单元 就是我们之前提到的类似于 内嵌的MPJ功能单元 而它只是用到了 如我们下图所示的这个 一路DAC 两路ADC 就可以了 同时 我们已经 预编译好了一个运算库 这个运算库主要是 把采集进来的信号进行解码 从而得到实际电机的转子信息 所以理论上来讲 它可以平行移植到 C2000的任何芯片上 这里简单的介绍一下 旋转变压器的工作原理 在定子侧有两个垂直90度的线圈 在转子上和转子固定在一起 随着转子共同转动有一个线圈 在定子侧 我们 有一个激励信号 转子在旋转的时候 会感应到激励信号 同时包含了转子的位置信息 那我们在定子侧就可以看到 和转子位置信息相关的 正弦调整好的信号 那我们需要做的就是把这个 调制了高频调制信号的 角度信息提取出来 这就是我们Position Manager 或者是我们 旋转变压器的解码库 需要做的工作 在旋转变压器 到我们C2000之间 我们需要一个硬件调理电路 这也是我们之前 在Design Driver EVN板上所看到的 会需要有一个 硬件的外围支持电路 那它所实现的主要功能 主要是先把C2000发出的激励信号 传递给我们的旋转变压器 那这种传递一种 我们可能有频率的变化 另外可能有电压幅值上的变化 在一点就是 把旋转变压器反馈回来的 正弦sin、cos的信号 传递给C2000的AD短脚 这里我们知道 C2000的AD是0到3.3V 但正弦信号可能是有一个正负的 所以我们经过模拟前端的调理 可能要把加了一个 直流的offset在上面 能满足C2000的AD采样要求 那这部分呢 实际上是我们在Design Driver 这个EVN板的原理图上 截下来的一张图 Design Driver整个板的原理图 PCB、(听不清) 以及在这个EVN板上所跑的 跟Position Manager相关 和电机控制相关的参考代码 都是完全公开的 大家可以随时去TI的官网 下载ControlSUITE 其中有一个iddk的文件包 这些信息就是 完全open source公开给大家的 大家随时可以去下载去看 从这个电路上我们看出 这一部分就是我们的激励信号 所要用的电路 下面就是sin、cos 两路的采样信号 同时我们造了一个1.6V的上拉 来保证我们sin、cos 有一个直流偏置 来满足0到3.3V的采样要求 从这个电路上来看 它要求的外围 这个电路非常简单 这也是从侧面印证了 我们刚才所说的 和用专用芯片去解码相比 我们这套旋转变压器的解码方案 它的硬件成本上大大做出了节省 那次是我们可能会有 另外一个疑问产生出来 就是我这个硬件成本节省了 那它的性能会不会受到影响 下面几页我们会针对这个问题 给大家详细介绍一下我们是如何 用软件的方式 去实现旋转变压器的解码 让大家对我们整个方案 有一个更加深入的认识 从而帮助大家更好的 去评估和分析这套方案 尤其是去评估它的性能 和专用解码芯片相比 有哪些它自己独特的地方 从而帮助您更好的评估和选择 不同的方案
大家好 欢迎大家参加TI工业研讨会
我是TI Century FAE Igor An
主要负责电机控制 和数字电源解决方案
下面部分由我来给大家介绍
TI在电机位置控制系统中 有哪些芯片、算法
和成套方案可供大家选择
帮助大家推进项目开发
这里大家看到的
是C2000系列产品
对于功能安全方面的需求做出的考量
在新一代的C2000产品中
就是我们发布不久的07X系列
37X系列以及未来即将发布的 004X系列产品中
都引入了功能安全相关需求的考量
这样客户就可以 用C2000系列产品
对自己的产品进行功能安全的认证
那我们最高可以达到的认证等级是
ISO262的SOD的最高的安全等级
同时我们也会为客户 过认证提供相关必要的文件支持
像我们的safety manual
FMEDA等等这些资料
TI有一个专门的safe TI的一个网页
就在TI.com上面有一个safe TI的网页
有非常丰富的TI 所能提供的功能安全
以及安全相关的 各方面的文件和软件支持
大家感兴趣可以到TI的官网查询
那我们在这里看到 就是我们
最新产品里面一个 37xD系列芯片的内部结构
那我们从内部结构上
它有非常多的重复外设
或者叫备份外设
一部分的考虑也是 为了实现安全功能的相关需求
同时我们所有的内存
Flash、RAM加寄存器
都有集成ECC的自动校验
还有这个功能
这也是功能方面 的必要的一个要求
前面一部分我为大家介绍了
Design Drive硬件电路板 的一些相关内容
同时还有一些和Position Manager 相关的C2000的一些特性
下面开始我们将着重介绍
Position Manager内部的 一些结构和相关软件
Position Manager正如前面 给大家介绍的
它是一个用类似于软件解码的方式
去替代传统的专用解码芯片
去解调各种绝对位置编码盘
还有旋转编码器
这类位置传感器的角度和位置信息
之所以讲它是类似于软件库的形式
只是大家用起来像是在烧一个软件库
实际上它真正的实现方式
我们之前在几页里面已经介绍了
它其实是类似于FEJ 的一部分的功能去实现的
因为它可以实现非常快的 计算速度和响应速度
保证我们的运算速度和精度
那我们Position Manager 从应用的solution的角度
它主要的优点就是
第一是我们可以节省 您非常多的开发时间
因为我们把这一部分功能
有TI的员工进行了设计 测试以及验证
节省了您的开发时间
同时由于节省了专用的解码芯片
让我们在硬件成本上做了节省
作为几个特定设计的软件库
我们对当前工业界应用的主流的
绝对位置传感器的 类型和通讯协议
进行了设计
那目前我们支持的 传感器类型和协议
主要是旋转编码器
resolver 还有sin、cos的传感器
QEP还有T-format就是 (听不清)的绝对位置传感器
BISS-C 还有EnDAT2.2
这些主流的传感器协议
我们外围电路加软件协议
解码 我们现在都是支持的
这些协议目前是在我们这个
F28379D、F28379S MCU上 进行测试和验证
这张表格向大家展示了 我们主要的
几种通讯协议的 测试条件和测试结果
一些的测试速率
像BISS-C我們只到5M
那传感器到 我们EVN板的这个线的
长度我们测试了100米
这个在很多应用中也是比较关键的
性能和指标
有一些应用场合中
绝对位置传感器 就是电机所处的位置
和控制板位置的距离 还是相对比较长的
在Position Manager所支持的 各种位置传感器的解码实现中
我们将为大家着重介绍 旋转编码器的解码实现
不同于Position Manager 所支持的其他
位置传感器的解码
旋转编码器的解码
并没有使用到COB的单元
就是我们之前提到的类似于
内嵌的MPJ功能单元
而它只是用到了
如我们下图所示的这个
一路DAC 两路ADC
就可以了
同时 我们已经 预编译好了一个运算库
这个运算库主要是 把采集进来的信号进行解码
从而得到实际电机的转子信息
所以理论上来讲
它可以平行移植到 C2000的任何芯片上
这里简单的介绍一下
旋转变压器的工作原理
在定子侧有两个垂直90度的线圈
在转子上和转子固定在一起
随着转子共同转动有一个线圈
在定子侧 我们
有一个激励信号
转子在旋转的时候
会感应到激励信号
同时包含了转子的位置信息
那我们在定子侧就可以看到
和转子位置信息相关的 正弦调整好的信号
那我们需要做的就是把这个
调制了高频调制信号的 角度信息提取出来
这就是我们Position Manager 或者是我们
旋转变压器的解码库
需要做的工作
在旋转变压器 到我们C2000之间
我们需要一个硬件调理电路
这也是我们之前 在Design Driver EVN板上所看到的
会需要有一个 硬件的外围支持电路
那它所实现的主要功能
主要是先把C2000发出的激励信号
传递给我们的旋转变压器
那这种传递一种 我们可能有频率的变化
另外可能有电压幅值上的变化
在一点就是 把旋转变压器反馈回来的
正弦sin、cos的信号
传递给C2000的AD短脚
这里我们知道 C2000的AD是0到3.3V
但正弦信号可能是有一个正负的
所以我们经过模拟前端的调理
可能要把加了一个 直流的offset在上面
能满足C2000的AD采样要求
那这部分呢
实际上是我们在Design Driver 这个EVN板的原理图上
截下来的一张图
Design Driver整个板的原理图
PCB、(听不清) 以及在这个EVN板上所跑的
跟Position Manager相关 和电机控制相关的参考代码
都是完全公开的
大家可以随时去TI的官网 下载ControlSUITE
其中有一个iddk的文件包
这些信息就是 完全open source公开给大家的
大家随时可以去下载去看
从这个电路上我们看出
这一部分就是我们的激励信号
所要用的电路
下面就是sin、cos 两路的采样信号
同时我们造了一个1.6V的上拉
来保证我们sin、cos 有一个直流偏置
来满足0到3.3V的采样要求
从这个电路上来看
它要求的外围 这个电路非常简单
这也是从侧面印证了
我们刚才所说的
和用专用芯片去解码相比
我们这套旋转变压器的解码方案
它的硬件成本上大大做出了节省
那次是我们可能会有 另外一个疑问产生出来
就是我这个硬件成本节省了
那它的性能会不会受到影响
下面几页我们会针对这个问题
给大家详细介绍一下我们是如何
用软件的方式 去实现旋转变压器的解码
让大家对我们整个方案
有一个更加深入的认识
从而帮助大家更好的 去评估和分析这套方案
尤其是去评估它的性能
和专用解码芯片相比
有哪些它自己独特的地方
从而帮助您更好的评估和选择
不同的方案
手机看
扫码用手机观看
 视频简介
视频简介
PositionManger介绍及旋转变压器软件解码介绍第一部分
所属课程:电机控制之旋变及位置反馈解决方案
发布时间:2017.05.04
视频集数:5
本节视频时长:00:10:00
TI旋变解码解决方案,及其他电机位置传感器解决方案介绍。



 未学习 电机驱动器及其位置反馈技术概览
未学习 电机驱动器及其位置反馈技术概览
 未学习 德州仪器PGA411旋变解决方案概览
未学习 德州仪器PGA411旋变解决方案概览
 未学习 DesignDrive EVM板简介
未学习 DesignDrive EVM板简介
 未学习 PositionManger介绍及旋转变压器软件解码介绍第一部分
未学习 PositionManger介绍及旋转变压器软件解码介绍第一部分
 未学习 旋转变压器软件解码方案介绍第二部分
未学习 旋转变压器软件解码方案介绍第二部分





