
专用传感器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
3D TOF机器人:障碍物检测,防撞和导航
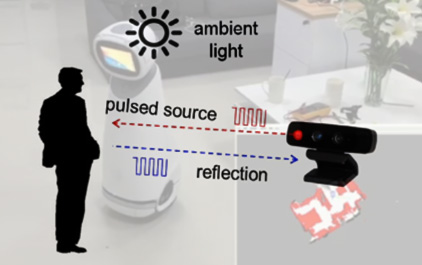
自主导航和防撞是消费者和工业机器人安全和高效运行的关键功能。了解3D飞行时间传感器如何使两个不同的机器人”看到“他们的环境并在没有碰撞的情况下四处移动。
在视频的第一部分,配备相对简单的算法和来自3D飞行时间传感器的深度图像的真空机器人能够确定何时减速,何时停止,哪个方向转向,以及如何 在没有碰撞的情况下绕过障碍物。 视频的后半部分演示了一个家用机器人,它配备了相同的3D飞行时间传感器和更先进的算法。 这个机器人构建了一个环境地图,并使用地图来规划它的路径。
开始学习
收藏本课程
课程报错


