3D TOF机器人:障碍物检测,防撞和导航
Loading the player...
将在30s后自动为您播放下一课程
我叫 Larry Lee, 是来自德州仪器 (TI) 的 3D 飞行时间传感器的系统工程师。 在本视频中,我 将演示 TI 3D 飞行时间 解决方案如何 可用于障碍物 检测、避碰 和导航。 TI 3D 飞行时间传感器的 工作方式为, 利用调制光 点亮场景 并测量返回光的 相位延迟。 相位延迟与实际 距离成比例。 TI 解决方案中的 每个像素都可并行 执行这种测量,最终得到 深度图。 此外,还会测量 返回光的 振幅,这样会 得到振幅图。 深度图和 振幅图 加上一些所用镜头的 知识一起 可用于计算点云, 即空间中的一组 xyz 数据点。 了解场景中 每个点的距离 可帮助机器人理解 其周围的环境。 实际上,3D 飞行 时间传感器 非常适合各种 移动机器人应用的 机器视觉。 我们关心的几个关键问题是 碰撞检测、地图、 基本导航、自动对接和 多机器人操作。 由于 3D 飞行时间传感器的 自我照明功能, 它可在黑暗中完美 工作。 让我们看一个 避碰示例。 在此视频剪辑中,我们将 看到一个配有 TI 飞行时间传感器的移动机器人 利用相对简单的算法来 检测障碍物并 减速。 首先,要碰到 障碍物的机器人 会寻找视野 中最近的点。 如果最短距离 比阈值近, 机器人会减速并 最终停下来。 一旦停止继续操作 而没有发生碰撞, 机器人必须决定 转向哪条路。 决定取决于 哪个方向 会通向 更宽敞的空间, 这需要将深度图 划分为左右两半, 并为每一边添加像素深度。 总和较大的 一边 即为要转至的方向。 这里是一个机器人利用这种 方法以一定角度接近 墙面的示例。 此外,有些障碍物 可能很小或很细薄, 难以使用 单像素范围的传感器看到。 考虑一下可能堵塞 真空吸尘器 机器人的鞋带、电线 和桌子, 或者机器人可能必须对其 周围进行清理的细椅子腿。 TI 提供的飞行时间 解决方案 同时支持 320 × 240 和 80 × 60 分辨率, 可满足不同的 需求。 要在 GPS 不工作的 室内进行导航, 3D 飞行时间 传感器可以帮助 机器人构建 其所处环境的地图 并在其中自我定位。 拥有地图将使 机器人能够规划其路径 并且更安全 而有效的进行导航。 这里是一个配有 TI 3D 飞行时间传感器的机器人, 它在房间中 移动时构建了一张地图。 地图位于右下角。 感谢您观看 本视频演示。 如果您希望 了解关于 TI 3D 飞行时间 解决方案的更多信息,请与您 当地的销售代表 或分销商联系来获取 定价和供货情况。 关于任何一般 销售问题,您 可以将问题发送至 support@ti.com。 有关技术问题,请访问 TI 3D 飞行时间页面 或查阅 E2E 论坛来了解关于光学传感器的信息。 最后,关于 软件开发, 请查阅 github.com 上的 VoxelSDK。
我叫 Larry Lee, 是来自德州仪器 (TI) 的 3D 飞行时间传感器的系统工程师。 在本视频中,我 将演示 TI 3D 飞行时间 解决方案如何 可用于障碍物 检测、避碰 和导航。 TI 3D 飞行时间传感器的 工作方式为, 利用调制光 点亮场景 并测量返回光的 相位延迟。 相位延迟与实际 距离成比例。 TI 解决方案中的 每个像素都可并行 执行这种测量,最终得到 深度图。 此外,还会测量 返回光的 振幅,这样会 得到振幅图。 深度图和 振幅图 加上一些所用镜头的 知识一起 可用于计算点云, 即空间中的一组 xyz 数据点。 了解场景中 每个点的距离 可帮助机器人理解 其周围的环境。 实际上,3D 飞行 时间传感器 非常适合各种 移动机器人应用的 机器视觉。 我们关心的几个关键问题是 碰撞检测、地图、 基本导航、自动对接和 多机器人操作。 由于 3D 飞行时间传感器的 自我照明功能, 它可在黑暗中完美 工作。 让我们看一个 避碰示例。 在此视频剪辑中,我们将 看到一个配有 TI 飞行时间传感器的移动机器人 利用相对简单的算法来 检测障碍物并 减速。 首先,要碰到 障碍物的机器人 会寻找视野 中最近的点。 如果最短距离 比阈值近, 机器人会减速并 最终停下来。 一旦停止继续操作 而没有发生碰撞, 机器人必须决定 转向哪条路。 决定取决于 哪个方向 会通向 更宽敞的空间, 这需要将深度图 划分为左右两半, 并为每一边添加像素深度。 总和较大的 一边 即为要转至的方向。 这里是一个机器人利用这种 方法以一定角度接近 墙面的示例。 此外,有些障碍物 可能很小或很细薄, 难以使用 单像素范围的传感器看到。 考虑一下可能堵塞 真空吸尘器 机器人的鞋带、电线 和桌子, 或者机器人可能必须对其 周围进行清理的细椅子腿。 TI 提供的飞行时间 解决方案 同时支持 320 × 240 和 80 × 60 分辨率, 可满足不同的 需求。 要在 GPS 不工作的 室内进行导航, 3D 飞行时间 传感器可以帮助 机器人构建 其所处环境的地图 并在其中自我定位。 拥有地图将使 机器人能够规划其路径 并且更安全 而有效的进行导航。 这里是一个配有 TI 3D 飞行时间传感器的机器人, 它在房间中 移动时构建了一张地图。 地图位于右下角。 感谢您观看 本视频演示。 如果您希望 了解关于 TI 3D 飞行时间 解决方案的更多信息,请与您 当地的销售代表 或分销商联系来获取 定价和供货情况。 关于任何一般 销售问题,您 可以将问题发送至 support@ti.com。 有关技术问题,请访问 TI 3D 飞行时间页面 或查阅 E2E 论坛来了解关于光学传感器的信息。 最后,关于 软件开发, 请查阅 github.com 上的 VoxelSDK。
我叫 Larry Lee, 是来自德州仪器 (TI) 的
3D 飞行时间传感器的系统工程师。
在本视频中,我 将演示
TI 3D 飞行时间 解决方案如何
可用于障碍物 检测、避碰
和导航。
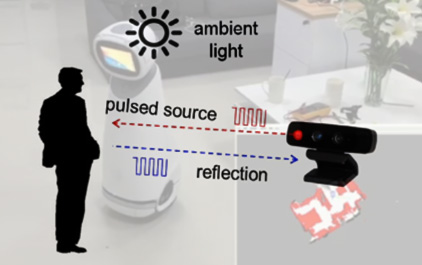
TI 3D 飞行时间传感器的 工作方式为,
利用调制光 点亮场景
并测量返回光的 相位延迟。
相位延迟与实际 距离成比例。
TI 解决方案中的 每个像素都可并行
执行这种测量,最终得到 深度图。
此外,还会测量 返回光的
振幅,这样会 得到振幅图。
深度图和 振幅图
加上一些所用镜头的 知识一起
可用于计算点云, 即空间中的一组 xyz
数据点。
了解场景中 每个点的距离
可帮助机器人理解 其周围的环境。
实际上,3D 飞行 时间传感器
非常适合各种 移动机器人应用的
机器视觉。
我们关心的几个关键问题是 碰撞检测、地图、
基本导航、自动对接和 多机器人操作。
由于 3D 飞行时间传感器的 自我照明功能,
它可在黑暗中完美 工作。
让我们看一个 避碰示例。
在此视频剪辑中,我们将 看到一个配有
TI 飞行时间传感器的移动机器人 利用相对简单的算法来
检测障碍物并 减速。
首先,要碰到 障碍物的机器人
会寻找视野 中最近的点。
如果最短距离 比阈值近,
机器人会减速并 最终停下来。
一旦停止继续操作 而没有发生碰撞,
机器人必须决定 转向哪条路。
决定取决于 哪个方向
会通向 更宽敞的空间,
这需要将深度图 划分为左右两半,
并为每一边添加像素深度。
总和较大的 一边
即为要转至的方向。
这里是一个机器人利用这种 方法以一定角度接近
墙面的示例。
此外,有些障碍物 可能很小或很细薄,
难以使用 单像素范围的传感器看到。
考虑一下可能堵塞 真空吸尘器
机器人的鞋带、电线 和桌子,
或者机器人可能必须对其 周围进行清理的细椅子腿。
TI 提供的飞行时间 解决方案
同时支持 320 × 240 和 80 × 60 分辨率,
可满足不同的 需求。
要在 GPS 不工作的 室内进行导航,
3D 飞行时间 传感器可以帮助
机器人构建 其所处环境的地图
并在其中自我定位。
拥有地图将使 机器人能够规划其路径
并且更安全 而有效的进行导航。
这里是一个配有 TI 3D 飞行时间传感器的机器人,
它在房间中 移动时构建了一张地图。
地图位于右下角。
感谢您观看 本视频演示。
如果您希望 了解关于 TI 3D 飞行时间
解决方案的更多信息,请与您 当地的销售代表
或分销商联系来获取 定价和供货情况。
关于任何一般 销售问题,您
可以将问题发送至 support@ti.com。
有关技术问题,请访问 TI 3D 飞行时间页面
或查阅 E2E 论坛来了解关于光学传感器的信息。
最后,关于 软件开发,
请查阅 github.com 上的 VoxelSDK。
我叫 Larry Lee, 是来自德州仪器 (TI) 的 3D 飞行时间传感器的系统工程师。 在本视频中,我 将演示 TI 3D 飞行时间 解决方案如何 可用于障碍物 检测、避碰 和导航。 TI 3D 飞行时间传感器的 工作方式为, 利用调制光 点亮场景 并测量返回光的 相位延迟。 相位延迟与实际 距离成比例。 TI 解决方案中的 每个像素都可并行 执行这种测量,最终得到 深度图。 此外,还会测量 返回光的 振幅,这样会 得到振幅图。 深度图和 振幅图 加上一些所用镜头的 知识一起 可用于计算点云, 即空间中的一组 xyz 数据点。 了解场景中 每个点的距离 可帮助机器人理解 其周围的环境。 实际上,3D 飞行 时间传感器 非常适合各种 移动机器人应用的 机器视觉。 我们关心的几个关键问题是 碰撞检测、地图、 基本导航、自动对接和 多机器人操作。 由于 3D 飞行时间传感器的 自我照明功能, 它可在黑暗中完美 工作。 让我们看一个 避碰示例。 在此视频剪辑中,我们将 看到一个配有 TI 飞行时间传感器的移动机器人 利用相对简单的算法来 检测障碍物并 减速。 首先,要碰到 障碍物的机器人 会寻找视野 中最近的点。 如果最短距离 比阈值近, 机器人会减速并 最终停下来。 一旦停止继续操作 而没有发生碰撞, 机器人必须决定 转向哪条路。 决定取决于 哪个方向 会通向 更宽敞的空间, 这需要将深度图 划分为左右两半, 并为每一边添加像素深度。 总和较大的 一边 即为要转至的方向。 这里是一个机器人利用这种 方法以一定角度接近 墙面的示例。 此外,有些障碍物 可能很小或很细薄, 难以使用 单像素范围的传感器看到。 考虑一下可能堵塞 真空吸尘器 机器人的鞋带、电线 和桌子, 或者机器人可能必须对其 周围进行清理的细椅子腿。 TI 提供的飞行时间 解决方案 同时支持 320 × 240 和 80 × 60 分辨率, 可满足不同的 需求。 要在 GPS 不工作的 室内进行导航, 3D 飞行时间 传感器可以帮助 机器人构建 其所处环境的地图 并在其中自我定位。 拥有地图将使 机器人能够规划其路径 并且更安全 而有效的进行导航。 这里是一个配有 TI 3D 飞行时间传感器的机器人, 它在房间中 移动时构建了一张地图。 地图位于右下角。 感谢您观看 本视频演示。 如果您希望 了解关于 TI 3D 飞行时间 解决方案的更多信息,请与您 当地的销售代表 或分销商联系来获取 定价和供货情况。 关于任何一般 销售问题,您 可以将问题发送至 support@ti.com。 有关技术问题,请访问 TI 3D 飞行时间页面 或查阅 E2E 论坛来了解关于光学传感器的信息。 最后,关于 软件开发, 请查阅 github.com 上的 VoxelSDK。
我叫 Larry Lee, 是来自德州仪器 (TI) 的
3D 飞行时间传感器的系统工程师。
在本视频中,我 将演示
TI 3D 飞行时间 解决方案如何
可用于障碍物 检测、避碰
和导航。
TI 3D 飞行时间传感器的 工作方式为,
利用调制光 点亮场景
并测量返回光的 相位延迟。
相位延迟与实际 距离成比例。
TI 解决方案中的 每个像素都可并行
执行这种测量,最终得到 深度图。
此外,还会测量 返回光的
振幅,这样会 得到振幅图。
深度图和 振幅图
加上一些所用镜头的 知识一起
可用于计算点云, 即空间中的一组 xyz
数据点。
了解场景中 每个点的距离
可帮助机器人理解 其周围的环境。
实际上,3D 飞行 时间传感器
非常适合各种 移动机器人应用的
机器视觉。
我们关心的几个关键问题是 碰撞检测、地图、
基本导航、自动对接和 多机器人操作。
由于 3D 飞行时间传感器的 自我照明功能,
它可在黑暗中完美 工作。
让我们看一个 避碰示例。
在此视频剪辑中,我们将 看到一个配有
TI 飞行时间传感器的移动机器人 利用相对简单的算法来
检测障碍物并 减速。
首先,要碰到 障碍物的机器人
会寻找视野 中最近的点。
如果最短距离 比阈值近,
机器人会减速并 最终停下来。
一旦停止继续操作 而没有发生碰撞,
机器人必须决定 转向哪条路。
决定取决于 哪个方向
会通向 更宽敞的空间,
这需要将深度图 划分为左右两半,
并为每一边添加像素深度。
总和较大的 一边
即为要转至的方向。
这里是一个机器人利用这种 方法以一定角度接近
墙面的示例。
此外,有些障碍物 可能很小或很细薄,
难以使用 单像素范围的传感器看到。
考虑一下可能堵塞 真空吸尘器
机器人的鞋带、电线 和桌子,
或者机器人可能必须对其 周围进行清理的细椅子腿。
TI 提供的飞行时间 解决方案
同时支持 320 × 240 和 80 × 60 分辨率,
可满足不同的 需求。
要在 GPS 不工作的 室内进行导航,
3D 飞行时间 传感器可以帮助
机器人构建 其所处环境的地图
并在其中自我定位。
拥有地图将使 机器人能够规划其路径
并且更安全 而有效的进行导航。
这里是一个配有 TI 3D 飞行时间传感器的机器人,
它在房间中 移动时构建了一张地图。
地图位于右下角。
感谢您观看 本视频演示。
如果您希望 了解关于 TI 3D 飞行时间
解决方案的更多信息,请与您 当地的销售代表
或分销商联系来获取 定价和供货情况。
关于任何一般 销售问题,您
可以将问题发送至 support@ti.com。
有关技术问题,请访问 TI 3D 飞行时间页面
或查阅 E2E 论坛来了解关于光学传感器的信息。
最后,关于 软件开发,
请查阅 github.com 上的 VoxelSDK。
手机看
扫码用手机观看
-
 未学习 3D TOF机器人:障碍物检测,防撞和导航
未学习 3D TOF机器人:障碍物检测,防撞和导航
00:03:47
播放中
 视频简介
视频简介
3D TOF机器人:障碍物检测,防撞和导航
所属课程:3D TOF机器人:障碍物检测,防撞和导航
发布时间:2019.03.11
视频集数:1
本节视频时长:00:03:47
自主导航和防撞是消费者和工业机器人安全和高效运行的关键功能。了解3D飞行时间传感器如何使两个不同的机器人”看到“他们的环境并在没有碰撞的情况下四处移动。
在视频的第一部分,配备相对简单的算法和来自3D飞行时间传感器的深度图像的真空机器人能够确定何时减速,何时停止,哪个方向转向,以及如何 在没有碰撞的情况下绕过障碍物。 视频的后半部分演示了一个家用机器人,它配备了相同的3D飞行时间传感器和更先进的算法。 这个机器人构建了一个环境地图,并使用地图来规划它的路径。