
磁传感器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
2.2 TI 高精度实验室 - 磁传感器:锁存器和开关 - 操作和释放点


[音乐播放]
大家好,欢迎观 看此 TI 高精度实验室
系列关于磁位置 传感的另一个视频。
我叫 Manny Soltero。
霍尔效应开关 和锁存器可实现
简单、紧凑、可靠 且具有成本效益的
非接触式运动传感解决方案。
这些器件 在各种机电系统中
正迅速得到普及,
用于检测物理量的变化,
如距离、角度、 压力、液位、
流速等。
在本视频中,我们 将介绍一些用于说明
霍尔效应开关 和锁存器之间的
相似点和不同点的基本特性, 以及用于简化
其与典型应用进行 集成的设计流程。
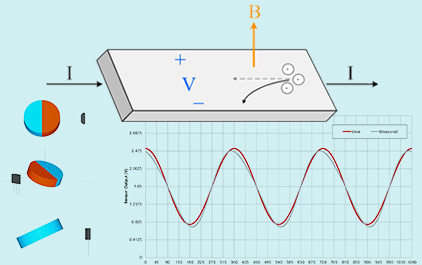
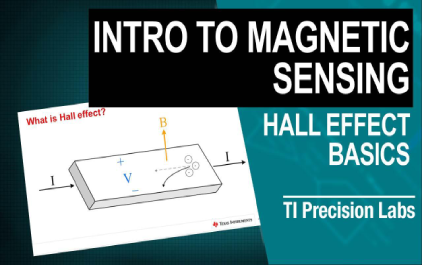
我们首先了解 一下基本概念。
霍尔效应开关 和锁存器
是一类霍尔效应 磁传感器,
它将通常称为 B 场的磁通密度信号
转换为 1 位数字输出。
这些器件通常 与永磁体一起使用,
以实现非接触式 运动传感应用。
霍尔效应开关 和锁存器具有方向性,
并沿其灵敏度 轴感应 B 场
分量。
尽管某些专用器件 可能具有
多达三个灵敏度轴。
但大多数器件 具有一个轴灵敏度。
霍尔效应开关 和锁存器感应
所应用的 B 场的不同属性。
开关感应振幅, 而锁存感应极性。
当磁通线位于
灵敏度轴方向时,
极性被称为正。
否则,极性被称为负。
从行为的角度来看, 霍尔效应开关和
锁存器本质上 是具有迟滞功能的
磁比较器。
上开关阈值 BOP
称为操作点。
下开关阈值 BRP
称为释放点。
阈值之间的 绝对差值
是比较器的迟滞。
迟滞表示输入 必须在相对于
阈值的相反 方向上改变
以使输出状态 改变的量。
开关和锁存器 对入射磁场
有类似的响应。
输入幅度 超过 BOP 时
输出电压低, 输入幅度小于 BRP 时
输出电压高。
开关和锁存器 之间的行为差异
是由于其磁阈值的 极性所造成。
开关具有相同 极性的 BOP 和 BRP,
即使极性保持不变 ,也能检测 B 场
振幅的变化。
另一方面, 锁存器的 BOP 和 BRP
极性相反, 只要 B 场振幅足够大,
就能检测 B 场
极性的变化。
现在我们来看看 典型的应用。
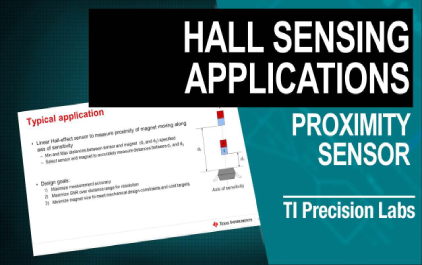
霍尔效应开关 主要用于
接近感应, 因为它们对 B 场
振幅很敏感。
在典型情况下, 永磁体沿传感器的
灵敏度轴
向任一方向移动。
该设计要求选择 一个传感器和磁体,
以便当磁体处于 距传感器的
指定距离 d1 和 d2 时,
传感器输出切换。
传感器的选择 由简单的一阶分析驱动,
该分析主要 基于以下观察:
传感器位置处的 B 场 振幅近似地随
与磁体距离的 平方反比而变化。
分析生成 方程式 2,
建立传感器 选择标准。
下面一个示例, 说明了传感器选择标准
在 DRV5032 系列
霍尔效应开关中的应用。
假设开关距离 d1
等于 2 毫米 且 d2 等于 6 毫米,
则 BOP 最大值 除以 BRP 最小值
小于 9 的传感器 很可能是合适的。
计算所有现有 DRV5032 型号的
开关阈值之比, 可以看出只有 DRV5032DU、AJ
和 ZE 版本符合 传感器选择标准。
这意味着可以 选择一个磁体,
使这些器件的输出
在所需的开关距离上切换。
完成传感器选择后, 现在必须选择
合适的磁体。
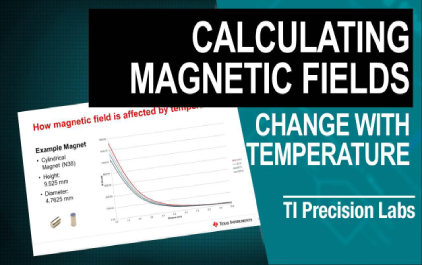
磁体选择 需要一些迭代。
我们的在线 磁场计算器
极大地简化了 选择过程。
计算器将磁体 几何结构和材料
类型作为输入, 并计算出
距离磁体南北轴 不同距离处的 B 场振幅,
以毫特斯拉为单位。
假设为该应用 选择了 DRV5032AJ,
我们调整磁体性能, 直到 2 毫米处的
B 场振幅大于 9.5 毫特斯拉的 BOP 最大值,
6 毫米处的 B 场振幅
小于 3 毫特斯拉的 BRP 最小值。
显然,直径 约为 1.7 毫米、
厚度约为 1.7 毫米的 圆柱形铁氧体
磁体可满足 DRV5032DU 和 AJ 版本
所需的开关距离。
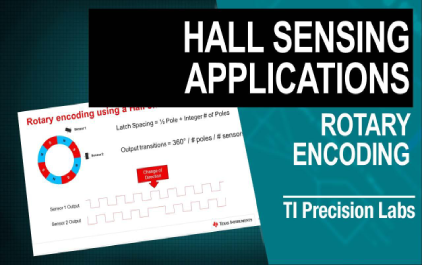
霍尔效应锁存 传感器主要用于
编码旋转和 其他类型的周期性运动。
增量旋转编码 用于解析
旋转轴角度的变化。
固定在旋转轴上的磁体
将角度信息 转换成旋转磁场,
旋转时磁场 会改变极性和大小。
放置在旋转 磁体附近的锁存传感器
将磁场极性变化 转换为脉冲串。
因此,可以通过计算 脉冲串中的边缘数
来估计角度的变化。
通过增加 每 360 度周期的
极性变化次数 可以改善分辨率。
这是通过增加磁极的 数量来实现的。
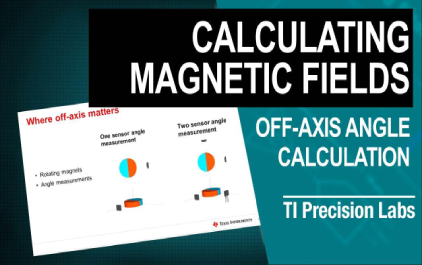
增加传感器的数量 也可以提高分辨率。
使用两个或更多的 传感器可为
解析旋转方向
带来额外好处。
只要传感器位置的 磁通密度幅度
超过传感器的 BOP 最大规格,
磁体与传感器的接近 程度便不再如此重要。
公式 3a、3b 和 4
可用于选择 重要的设计参数。
现在我们来看一个例子,
其中设计要求 目标角分辨率为 5 度,
最大角速度为 10000 RPM。
目标是选择极数、 锁存传感器
数量和所需的
传感器采样率。
应用方程式 3a 表明,至少需要 72 次转换
才能达到 5 度 最小角度
分辨率。
如果我们使用两个 传感器来支持轴方向,
那么磁体必须 至少有 36 个磁极,
或者 18 个极对。
但是,如果只有 20 极磁体可用,
则必须增加 传感器的数量
以实现目标分辨率。
求解 M 的公式 3a 表明,
使用 20 极磁体 需要最少
四个锁存传感器。
所需的采样率 可直接从
方程式 4 中计算得出, 并且许多器件
都满足这一要求, 其中包括 DRV5011、DRV1513 和 DRV5015。
如需查找更多磁位置 传感技术资源
和搜索产品,请访问 TI.com/halleffect。
-
 未学习 1.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感简介
未学习 1.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感简介
-
 未学习 1.2 TI 高精度实验室 - 磁传感器:磁场计算器
未学习 1.2 TI 高精度实验室 - 磁传感器:磁场计算器
-
 未学习 2.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感器的带宽与功耗权衡
未学习 2.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感器的带宽与功耗权衡
-
 未学习 2.2 TI 高精度实验室 - 磁传感器:锁存器和开关 - 操作和释放点
未学习 2.2 TI 高精度实验室 - 磁传感器:锁存器和开关 - 操作和释放点
-
 未学习 2.3 TI 高精度实验室 - 磁传感器:了解线性霍尔效应位置传感器的主要规格
未学习 2.3 TI 高精度实验室 - 磁传感器:了解线性霍尔效应位置传感器的主要规格
-
 未学习 3.1 TI 高精度实验室 - 磁传感器:将霍尔效应位置传感器用于旋转编码应用
未学习 3.1 TI 高精度实验室 - 磁传感器:将霍尔效应位置传感器用于旋转编码应用
-
 未学习 3.2 TI 高精度实验室 - 磁传感器:设计模拟接近传感器
未学习 3.2 TI 高精度实验室 - 磁传感器:设计模拟接近传感器
-
 未学习 4.1 TI 高精度实验室 - 磁传感器:永磁磁场随温度变化的情况
未学习 4.1 TI 高精度实验室 - 磁传感器:永磁磁场随温度变化的情况
-
 未学习 4.2 TI 高精度实验室 - 磁传感器:非轴磁场角度计算
未学习 4.2 TI 高精度实验室 - 磁传感器:非轴磁场角度计算
-
 未学习 3D 霍尔效应传感器的规格
未学习 3D 霍尔效应传感器的规格
-
 未学习 三维 (3D) 传感应用
未学习 三维 (3D) 传感应用
-
 未学习 磁电流传感简介
未学习 磁电流传感简介
-
 未学习 AMR 传感器简介
未学习 AMR 传感器简介
-
 未学习 (中文)使用 TIMSS 模拟线性运动
未学习 (中文)使用 TIMSS 模拟线性运动
-
 未学习 (中文)TI 磁感应仿真器 (TIMSS) 的后仿真数据处理
未学习 (中文)TI 磁感应仿真器 (TIMSS) 的后仿真数据处理
-
 未学习 (中文)使用 TIMSS 模拟静态位置
未学习 (中文)使用 TIMSS 模拟静态位置
-
 未学习 (中文)使用 TIMSS 进行磁体温度补偿
未学习 (中文)使用 TIMSS 进行磁体温度补偿
-
 未学习 (中文)TI 磁感应仿真器 (TIMSS) 入门
未学习 (中文)TI 磁感应仿真器 (TIMSS) 入门
-
 未学习 (中文)利用 TI 磁感应仿真器 (TIMSS) 入门
未学习 (中文)利用 TI 磁感应仿真器 (TIMSS) 入门
-
 未学习 (中文)了解 TI 磁感应仿真器 (TIMSS) 中的环形磁体
未学习 (中文)了解 TI 磁感应仿真器 (TIMSS) 中的环形磁体
-
 未学习 (中文)使用 TI 磁感应仿真器 (TIMSS) 仿真旋转
未学习 (中文)使用 TI 磁感应仿真器 (TIMSS) 仿真旋转
-
 未学习 (中文)TI 磁感应仿真器 (TIMSS) 的操纵杆倾斜
未学习 (中文)TI 磁感应仿真器 (TIMSS) 的操纵杆倾斜
-
 未学习 (中文)更改 TI 磁感应模拟器 (TIMSS) 的旋转方向
未学习 (中文)更改 TI 磁感应模拟器 (TIMSS) 的旋转方向
-
 未学习 (中文)TIMSS 磁感应模拟器 (TIMSS) 的磁铁选择
未学习 (中文)TIMSS 磁感应模拟器 (TIMSS) 的磁铁选择
-
 未学习 (中文)TIMSS 的传感器选择选项
未学习 (中文)TIMSS 的传感器选择选项
-
 未学习 (中文)将仿真与 TI 磁感应仿真器 (TIMSS) 进行比较
未学习 (中文)将仿真与 TI 磁感应仿真器 (TIMSS) 进行比较
-
 未学习 过渡检测
未学习 过渡检测
-
 未学习 两个状态选择器
未学习 两个状态选择器
-
 未学习 迎面应用介绍
未学习 迎面应用介绍
-
 未学习 霍尔效应电流传感
未学习 霍尔效应电流传感
-
 未学习 使用 3D 霍尔效应传感器检测磁篡改
未学习 使用 3D 霍尔效应传感器检测磁篡改
-
 未学习 使用霍尔效应位置传感器进行旋转编码
未学习 使用霍尔效应位置传感器进行旋转编码
-
 未学习 磁电流检测简介
未学习 磁电流检测简介
-
 未学习 封装内磁电流检测
未学习 封装内磁电流检测
-
 未学习 TI 磁感应仿真器功能简介
未学习 TI 磁感应仿真器功能简介
-
 未学习 利用 TI 磁感仿真器(TIMSS)仿真线性行程
未学习 利用 TI 磁感仿真器(TIMSS)仿真线性行程
-
 未学习 TI 磁感应仿真器功能简介
未学习 TI 磁感应仿真器功能简介





































