
磁传感器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
3.1 TI 高精度实验室 - 磁传感器:将霍尔效应位置传感器用于旋转编码应用


[提示声]
大家好。
我叫 Dan Harmon,
现任德州仪器 电流检测和磁感应
产品线汽车部门
营销工程师。
在各种类型的 磁传感器中,
有三种基本的 霍尔效应位置传感器:
锁存器、开关 和线性输出。
在本课程中, 我们将讨论
如何将锁存器 或线性传感器
用于旋转编码应用。
回顾一下, 锁存器指示最近
测量的磁通密度。
当南极超过 运行阈值时,
器件输出 将切换为低电平,
并保持处于低电平状态, 直到北极超过释放
阈值导致输出 切换为高电平。
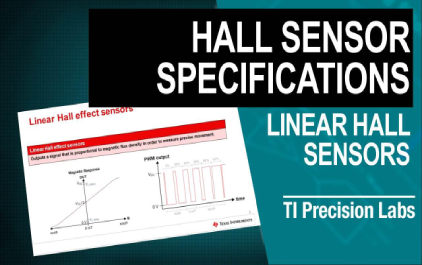
相反,线性器件的输出
与磁通密度的 强度成正比,
并且通常是一个电压。
编码器用于 测量相对旋转运动。
通过使用霍尔效应 锁存器来检测
连接到旋转 物体上的环形磁铁的
磁极边界转捩, 可以确定旋转的量或转速。
该信息提供给 MCU。
通过计算脉冲,
您可以确定旋转的圈数。
通过测量 边缘的频率,
并了解磁极的 数目和间距,
就可以确定转速。
如果还需要 顺时针或
逆时针等方向信息, 则可以通过添加
第二个锁存器器件 来增加一个相位偏移。
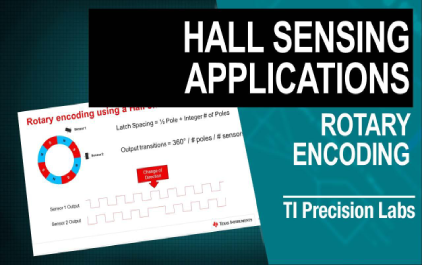
创建此相位偏移 需要使两个传感器之间
保持适当的间距。
当传感器的分隔间距为 每个磁极
长度的一半 加上任意
整数个磁极长度时, 即可获得
理想的 90 度正交偏移。
在图中,传感器的 间距为 1.5 极。
对于所示的 8 极磁环,
根据方程式 360 度除以 8 极
除以 2 个传感器, 可以得出其中一个
传感器每旋转 22 又 1/2 度会改变一次输出。
方向变化 由两个信号之间的
转换顺序检测。
为了正确 检测旋转,
您需要确保 锁存器的采样频率
足够快,能够 捕捉到每个磁极。
要计算最小 采样频率,
不妨假设每个 极点周期只采样一次,
那么理想情况下, 您将在峰值处对磁场进行采样。
相反,如果 每个周期
仅限于一个采样, 则需要避免
在磁场越过零点时 进行采样。
由于锁存器 采样频率和
旋转频率是异步的,
因此建议您至少 以极点频率的
两倍进行采样。
这样,一个样本 出现最坏情况
意味着另一个样本 将出现理想情况。
请注意, 当采样率是
每秒极数的两倍时, 大多数采样
所测量的磁场 将明显低于峰值,
将明显低于峰值,
因为峰值仅在 传感器和极点
完全对齐时出现。
在这种情况下, 应使用比锁存器的
最大工作点 更强的磁场。
例如,如果我们 假设最大转速
为 60000 RPM,此转速 可转换为每秒 2000 极,
这意味着 您需要
选择采样频率 至少为 4000 赫兹的
器件。
在大多数旋转 编码应用中,
采样频率远大于
旋转速度。
因此,您将在每个 极点周期内得到多个样本。
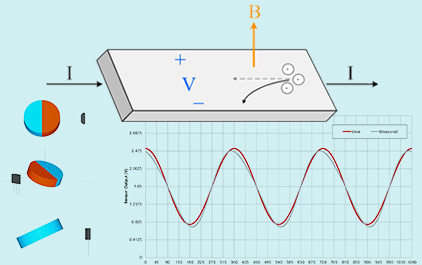
可以使用线性 霍尔效应传感器
代替锁存器。
这个想法与我们所讨论的 锁存器的情况非常相似。
但输出现在 是一个与磁场
成比例的连续 正弦波而不是
一系列脉冲。
由于输出是连续的, 因此使用线性
可以更精确地
掌握环形磁铁的 实际旋转位置。
由于模拟电压 首先需要
转换为数字信号, 因此该实现
将在系统控制器中 占用更多的计算能力。
然后,微控制器 将执行数字
信号处理, 以确定转速和
旋转方向。
此图表突出显示了 磁极间距的不完美
机械排列会 如何对旋转编码
应用的性能 产生不利影响。
为了确定 旋转方向,
需要两个传感器 相对于磁极的
确定性正交。
另外,包括磁极尺寸
和磁场强度变化 在内的磁体缺陷
进一步破坏了 精确重现旋转
方向的能力。
这里展示的是一个 TI 设计, 详细介绍了
使用两个 DRV5013 霍尔效应锁存器实现
旋转编码的设计过程。
此外,我们还发布了 一个 TI 应用简报,
讨论了为旋转 编码应用
选择霍尔锁存器的 设计注意事项。
旋转编码应用的 示例包括
许多制造环境中 使用的线性
测量系统、 传送系统、打印机、
人机界面控制 或伺服电机。
有关霍尔效应传感器的 更多信息或视频,
请访问 ti.com/halleffect。
谢谢。
-
 未学习 1.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感简介
未学习 1.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感简介
-
 未学习 1.2 TI 高精度实验室 - 磁传感器:磁场计算器
未学习 1.2 TI 高精度实验室 - 磁传感器:磁场计算器
-
 未学习 2.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感器的带宽与功耗权衡
未学习 2.1 TI 高精度实验室 - 磁传感器:霍尔效应位置传感器的带宽与功耗权衡
-
 未学习 2.2 TI 高精度实验室 - 磁传感器:锁存器和开关 - 操作和释放点
未学习 2.2 TI 高精度实验室 - 磁传感器:锁存器和开关 - 操作和释放点
-
 未学习 2.3 TI 高精度实验室 - 磁传感器:了解线性霍尔效应位置传感器的主要规格
未学习 2.3 TI 高精度实验室 - 磁传感器:了解线性霍尔效应位置传感器的主要规格
-
 未学习 3.1 TI 高精度实验室 - 磁传感器:将霍尔效应位置传感器用于旋转编码应用
未学习 3.1 TI 高精度实验室 - 磁传感器:将霍尔效应位置传感器用于旋转编码应用
-
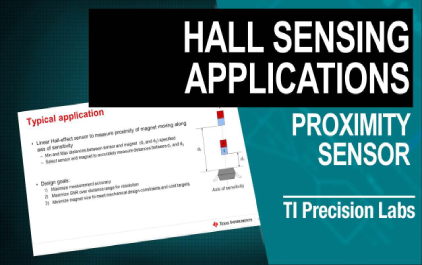 未学习 3.2 TI 高精度实验室 - 磁传感器:设计模拟接近传感器
未学习 3.2 TI 高精度实验室 - 磁传感器:设计模拟接近传感器
-
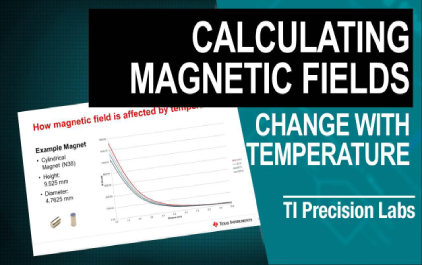 未学习 4.1 TI 高精度实验室 - 磁传感器:永磁磁场随温度变化的情况
未学习 4.1 TI 高精度实验室 - 磁传感器:永磁磁场随温度变化的情况
-
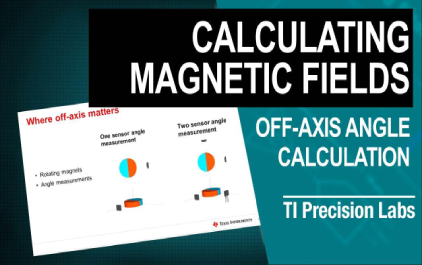 未学习 4.2 TI 高精度实验室 - 磁传感器:非轴磁场角度计算
未学习 4.2 TI 高精度实验室 - 磁传感器:非轴磁场角度计算
-
 未学习 3D 霍尔效应传感器的规格
未学习 3D 霍尔效应传感器的规格
-
 未学习 三维 (3D) 传感应用
未学习 三维 (3D) 传感应用
-
 未学习 磁电流传感简介
未学习 磁电流传感简介
-
 未学习 AMR 传感器简介
未学习 AMR 传感器简介
-
 未学习 (中文)使用 TIMSS 模拟线性运动
未学习 (中文)使用 TIMSS 模拟线性运动
-
 未学习 (中文)TI 磁感应仿真器 (TIMSS) 的后仿真数据处理
未学习 (中文)TI 磁感应仿真器 (TIMSS) 的后仿真数据处理
-
 未学习 (中文)使用 TIMSS 模拟静态位置
未学习 (中文)使用 TIMSS 模拟静态位置
-
 未学习 (中文)使用 TIMSS 进行磁体温度补偿
未学习 (中文)使用 TIMSS 进行磁体温度补偿
-
 未学习 (中文)TI 磁感应仿真器 (TIMSS) 入门
未学习 (中文)TI 磁感应仿真器 (TIMSS) 入门
-
 未学习 (中文)利用 TI 磁感应仿真器 (TIMSS) 入门
未学习 (中文)利用 TI 磁感应仿真器 (TIMSS) 入门
-
 未学习 (中文)了解 TI 磁感应仿真器 (TIMSS) 中的环形磁体
未学习 (中文)了解 TI 磁感应仿真器 (TIMSS) 中的环形磁体
-
 未学习 (中文)使用 TI 磁感应仿真器 (TIMSS) 仿真旋转
未学习 (中文)使用 TI 磁感应仿真器 (TIMSS) 仿真旋转
-
 未学习 (中文)TI 磁感应仿真器 (TIMSS) 的操纵杆倾斜
未学习 (中文)TI 磁感应仿真器 (TIMSS) 的操纵杆倾斜
-
 未学习 (中文)更改 TI 磁感应模拟器 (TIMSS) 的旋转方向
未学习 (中文)更改 TI 磁感应模拟器 (TIMSS) 的旋转方向
-
 未学习 (中文)TIMSS 磁感应模拟器 (TIMSS) 的磁铁选择
未学习 (中文)TIMSS 磁感应模拟器 (TIMSS) 的磁铁选择
-
 未学习 (中文)TIMSS 的传感器选择选项
未学习 (中文)TIMSS 的传感器选择选项
-
 未学习 (中文)将仿真与 TI 磁感应仿真器 (TIMSS) 进行比较
未学习 (中文)将仿真与 TI 磁感应仿真器 (TIMSS) 进行比较
-
 未学习 过渡检测
未学习 过渡检测
-
 未学习 两个状态选择器
未学习 两个状态选择器
-
 未学习 迎面应用介绍
未学习 迎面应用介绍
-
 未学习 霍尔效应电流传感
未学习 霍尔效应电流传感
-
 未学习 使用 3D 霍尔效应传感器检测磁篡改
未学习 使用 3D 霍尔效应传感器检测磁篡改
-
 未学习 使用霍尔效应位置传感器进行旋转编码
未学习 使用霍尔效应位置传感器进行旋转编码
-
 未学习 磁电流检测简介
未学习 磁电流检测简介
-
 未学习 封装内磁电流检测
未学习 封装内磁电流检测
-
 未学习 TI 磁感应仿真器功能简介
未学习 TI 磁感应仿真器功能简介
-
 未学习 利用 TI 磁感仿真器(TIMSS)仿真线性行程
未学习 利用 TI 磁感仿真器(TIMSS)仿真线性行程
-
 未学习 TI 磁感应仿真器功能简介
未学习 TI 磁感应仿真器功能简介





































