60GHz mmWave传感器
Loading the player...
将在30s后自动为您播放下一课程
下面就由我来介绍industrial雷达的 make和update 其实各位很幸运 因为我们TI刚刚好在这个月月初 制了60GHz的雷达 各位在用雷达的时候,会想到 不管是老板还是自己 会想到的第一件事是什么 大部分都是说你们这个到底合不合法 会说你这个频段是OK的吗 用了会不会出问题 的确,regulation是一个很大的问题 大家也知道TI十年磨一剑 做了雷达 一开始是给车用客户的 因为77G的雷达 主要是用在车子 全世界,大概77G都通用 问题是你把车用雷达的 频段拿来做工业用 拿来做一般controller用 基本上是不太可以 世界上没有几个国家 是可以让你这么做的 所以呢,我们也知道这个问题 所以我们算是 且战且走 先推出工业用雷达 来focus一些可以用的市场 同时我们也慢慢的在做60G的雷达 终于,就在这个月初 我们把60G的雷达制作了 这边有一个60G雷达的一个开发板 最新的开发板 我传下去给各位看一下 可以看见它是一个两片式的组合 这个在台湾只有两片 就麻烦各位手下留情 对它温柔一点儿 这个其实在我们的网站上就有 有它的说明书跟用户手册 这个有得卖 这个待会儿会跟各位看一下 回到我刚刚的问题 第一件事大家就会问说 到底合不合法 我们来先看 全世界大概只有 日本用77G的雷达 用在车用以外是OK的 他们并没有限制 所以如果你的客户在日本 你可以选用TI的77G工业用雷达 没有问题 他们并没有这样的限制 如果在美国 美国就好玩了 美国,77G只允许装在所谓的 fluid level sensing 就是像油槽、化学槽、混凝土槽 你可以装那边 侦测那个液面的高度 而且他有规定,一定要往下打, 不可以往旁边打 他会怕你把电子波散进去 影响到其他的东西 因为美国有些绯安的设备 大概也是用这个频段 所以他规定是这个样子 至于其他的应用, 像people counting 或者是 工厂的avg啊, 那种自动设备,都不行 因为那个都有可能会往旁边打 会散进去,不行 在这种状况下,就只有60G 只有60G可以使用 我们在看其他的地方 欧洲,欧洲跟美国其实也差不多 但是欧洲 欧洲在77G的部分 有某些频段 是可以用的 现在我们讲77其实都是一个统称 所谓的77都是从76—81 67其实也是一个统称 60—64 各位要有这样的一个概念 在欧洲的话呢 某些77G可以 60是绝对没问题的 60是所谓的ism ben 就跟我们(听不清) 用的2.4G是一样的 那个是不需要去跟政府license 所以大家用的 所以你看到2.4G有WiFi 有蓝牙,还有一大堆 通通集成在2.4G 所以2.4G的信号很脏 常会有问题 所以才会,慢慢移到5G 偏偏5G传的距离又很短 将来比如说我们5G的行动网路 5G的行动网路,有些时候也会用到 二十几G的mmWave这个频段 所以各位可以知道 5G的基地台一定比现在4G要多很多 因为大家学过电视传播源知道嘛 频率越高,传的距离越短 虽然它的能量高 可是它的绕射跟 点射是比较不行的 那会想到 再请各位思考一个问题 为什么现在大家用24G 理论上说24G传的比60G或77G 还远 因为它的频率比较短 可是为什么 大家在网路上看到 如果是77G或60G 我们能够侦测的距离更长 所以我们想过这个问题 待会儿再跟各位讲为什么 我们接着往下看 China跟Korea 就是铁板硬块 77G完全不能用 这边台湾呢 台湾跟中国一样 其实一样的意思是说 我们没有规定到底可以用或不能用 没有明文规定 没有明文规定77G到底能用不能用 但是为了避免风险 将来东西卖出去了, 结果被人家说不合法 你要回收,这样就太划不来了 所以最安全的选择就是选60G 60G放纵四海皆准 都是OK的 当然我们先看一下 在TI 出60G之前 TI当然是有两个我们出了77G的sensor 刚刚就是有提到说我们的 (听不清)变化的一个准则 前面如果是a就是automotive 前面如果是i就是industrial 台湾跟中国一样,就是没有限制 就是没有明文规定可以或不可以 你看那个频谱 想那个ncc列出的一大张 什么频段谁用 但是在77G这个地方 他没有写 没有写清楚 所以你要用可以, 但是风险自负 TI原本就有77G 的solution 1443跟1642 再补充一下 1443跟1642, 前面这个是比较中阶的 因为它里面有dsp 我可以在里面做一些 比较高等的运算 当然,我们TI也不是 可以看一下, 基本上的应用就是这样子 1443可以看到所有的资料进来之后 经过这些处理 处理程序之后 它最多吐出来是什么 是point cloud 是点云 就是一个一个的点,侦测到多少点 每个点的距离、角度跟速度 它会给你 但是如果你要做一些 比较高等的侦测的话 比如说你要把好几个点 比如说一台车 一台车可能有五六个、 七八个甚至十几个反射点 它通通会报给你 在1443这样子的,通通报给你 你要是一判断说 到底它是不是同一个物体 那你要怎么判断呢 其实也很简单 如果这几个物体同时在移动 具有同时的位移、同样的 角度跟同样的速度 那这几个点大概就是同一个物体 没错吧 但是这个intelligent事实上是可以做在 做在我们的SOC里面的 你可以用dsp把它做clustering 甚至可以做tracking 最后呢,甚至你 还可以做classification classification很多人很有兴趣 就是说你要侦测人还是狗 怎么办 你让我分得出来 因为像很多做(听不清)的厂商 他们常常会误判 常常人走过去,camera照是OK的 可是同时小猫小狗走过去 或者只是风吹草动 它的camera就打开开始照相 就是代表说, 它没有办法做classification 分类 雷达,如果你写 高端一点的演算法的话 你根据点云多广 甚至点云长的形状 你稍微可以辨识一下 是什么样的东西 这当然是需要很多的尝试了 不过至少,你如果用的dsp的话 这些东西都是有可能的 那6G可以看到 也不是说从无到有 其实我们是从77G的产品 把它延伸过来 之前的1642现在变成叫6843 之后会有一个1443, 最后会有一个6443 基本上里面的东西大致一样 大致一样 但是呢,6843多了比较多的东西 第一个,它原本只有 两个transmitter天线 它现在三个 变成三个之后呢 不管是在角度的solution 或者是在做其他的, 想那个增加snr 用(听不清)去做 snr的技巧都会变好 另外它的记忆体也增加了 这个记忆体的增加其实很关键 就是说它的记忆体增加事实上是增加 R4这个地方 实际上你的R4 之前你在dsp,在这个1642时代呢 dsp它要负责来做fft的运算 因为它里面没有fft的加速器 但是到了18的时候 抱歉 到了6843的时候 fft的加速器也整进来了 就代表说dsp原本拿来计算fft的 computing power 现在可以把它构出来 你的dsp可以做更高端的事情 那设置它加的记忆体在R4上面 R4也可以做一些尝试 抱歉 可以直接进行演算法 其实像我们people counting的话 之前都有看过people counting的demo 里面有用到一个盐酸伐叫G trick G trick不是用在dsp上面的 G trick反而是用在R4上面的 我这样说事实上我也很讶异 事实上R4是有能力去 辅助dsp来R一些 比较高等的algorithm 可以看一下,这是它们的一些比较 你可以看到 6843,它的中频,已经提升到10MHz RAM也增加了 多了一个fft的加速器 另外它的transmitter天下又多了一根 6443基本上没有什么大改变 就是原本的76—81 现在把它换成60—64 大概是这个样子 抱歉,它的记忆体也增加了一些 其实它的R4现在可以用一些 比较高等的一些演算法 那我再把这个(听不清)再整理一下 6843就是之前的1642的下一代 里面的(听不清)是这个样子 我们已经发布了 十一月初的时候就已经发布了 正式量产是在明年的四月 同样的,这一颗呢 它的6443一样 它是focus在比较短 刚刚忘了讲 大概是在100公尺附近的应用 50公尺附近的话,只需要用这个 它一样,它一样的量产的 时间是在明年的四月 这边还有一个 神秘的... 这个cheaper是我们目前在规划中的 它事实上就是一个 它是focus在show range 但是它主要的目的是拿来做 PI或(听不清)的replacement 我们有一个很大的 (听不清)想要把 超音波给干掉 各位车子都有倒车雷达,对吧 你的车子有几颗倒车雷达 少说会有两颗 有的比较高档还会有四颗 甚至六颗 前面还要加好几颗, 很丑的,还要挖洞 为什么呢 因为超音波的侦测距离很短 大概不到5公尺 而且它的角度很窄 它的角度很窄 所以为什么装那么多颗 超音波呢 因为它的角度很窄 必须装多一点,才能 侦测到各个角度 但是雷达没这个问题 雷达的侦测距离又长 15公尺已经够了吧 就算你不小心误踩油门 15公尺应该也有时间 让你反应并且刹住 而且它的角度很广 那是跟你天线的设计有关系 但是至少可以到150—160以上 所以可以用这个雷达 也不是说一颗比一颗 当然是雷达比不上 超音波那么便宜 但是你一颗可以取代四颗 就很多人很有兴趣 而且雷达除了做倒车以外 它可能还可以做些额外的 像盲点侦测 都可以整合在同一根雷达上面 另外,一个最大的重点 就是它除了是low power之外 它还是low cost 这个cost 基本上是可以 可以匹敌到四五颗超音波 跟它大概一样的价钱, 这样子的一个等级 那这边有看到一个叫aop 叫做antenna on package 我们拜访了那么多颗 其实我们常遇到 客户最大的问题 第一个就是客户没有 设计天线的人才 这是第一点 第二点 就算他有设计天线的人才 他没有测试天线的仪器 因为77G,60G的频率太高频了 买那种高频的仪器 动则都是上千万 那就有可能受不了 第三个最难的就是 客户可能没有办法写一些演算法 没关系,TI都听到了,所以 我们就除了aop这个东西 所谓的aop呢 我们直接把天线做在 我们的package上面 所以这就很大程度解决客户的问题 客户自己不需要design天线 不用测试天线 他只要专心写他的演算法就好了 这个是我们把这几个 这是我们目前现有的产品 现有的我们已经raise6843 以及6843aop 这个aop我们准备在 明年的一月就会demo出来 其实各位现在在我们官网上 已经看到这个制出来了 只是你点进去还是空的 一样的,我们在6443 就是比较中阶的一样会有aop 这地方有提到这个神秘的cheap 一样会有个aop出来 那还有一个呢 就是awr1843 刚刚有提到 有个awr1843 那我们可能会出也可能不会出 因为这一颗是77G的 我们要看客户的需求 才会决定去说会不会把 这颗正式的relate出来 其实要relate出来也很简单 只要把awr改一改就行 awr1843的测试过程 可能还比iwr严谨 因为所有的车用的 温度都是-40—120℃ 工业用主-40—105而已 不用再过车规认证 我们很快就可以拿来易于二次的 主要是因为它还是77G的 我们现在看起来77G的 市场在工业上并不是很吃香 所这个是看状况 我们来讲一下aop 这个就是我们aop的trip 这个是77G的(听不清) 这边各位可能看不到 这边有四个solo天线跟 三个follow天线在这个地方 强调一下,这是77G的(听不清) 不是60G的 60G的天线会长这个样子 这边三个follow天线 四个solo天线 所以它的天线的virtual antenna的 场形会长成这个样子 aop到底会带给客户什么好处呢 很明显的就是第一个 你的PCB的design会变得简单 因为我们现在的,各位看到刚刚那个 板子 我们现在是antenna on PCB对吧 我们也不能随便乱做 PCB的材料是(听不清)什么东西 那个其实还蛮贵的 可是如果你用aop的话 你用很简单的材料 去做你的PCB都行 所以这会省掉很大... 我们自己内部评估过 大概可以省六元钱 第二个 你的那个开发时长, 所以更不用设计天线 你不用测天线 至少可以赚到. 3—6个月的开发时长 第二点,你aop做上去之后 其实你可以做很小的trip 因为天线都已经长到package上面 可以注入很小的model 这边有看到,百分之 系数small learning on 24MHz 40%比aop的还要小 另外还有个好处就是说 因为它直接aop了 所以它之间的接线 是距离是很短的 所以几乎没有所谓的 conduction的nose 它的(听不清)反而比你天线做在 PCB板上还要高 意思就是,比你自己 做天线延伸的更远 当然,以同样的天线 patent比较是这个样子 但是天线自己设计的话, 你可以根据不同的应用 去做不同天线的设计 你要打得远的或者打得广的 那个就没有办法 那个就没办法用aop做出来 天线就固定在那边 客户如果有天线的需求 有自己design天线的需求, 那就要麻烦客户 用(听不清)aop的 他自己去设计天线 这个东西其实已经发布了 就刚才提到 我们在测试,就明年的一月九日 会demo simple的话在2Q,就可以拿到simple 这边有一个小小的图 就是一个case trip 你可以看出来,这个model那么小 这个大概是2.2 x 2.3公分 然后再aop这个 package大概是1.5 x 1.5公分 这个是aop的一些performers 你可以看的到 我们aop目前设计的是一个广角的 就是说它的fov 上下一百六十度,左右一百六十度 很广 它的侦测距离 各位在问侦测距离的时候 一定要知道一件事,就是 到底是侦测什么东西 因为侦测人、侦测车或侦测小狗 那个侦测距离是完全不一样 主要是因为result us, 就是result code section 换句话来说,就是反射的强度 所以以人来讲 它可以侦测到五十度正前方 如果左右六十度的话 在三十公尺 八十度的话是十五公尺 如果是车子的话 可以到几乎是两倍 我们里面还可以用一个技巧 就是类似像 been forming这样子的技巧 并不是真的been forming 因为目前还没有 资源这个been forming 我们叫做bpm, binary的phase modulation 利用那个技巧,大概还能增加30% 所以大概从五十提升到六十五 bpm可以增加一些snr 所以可以用你的距离进一步提升 基本上这样子的一个东西 已经符合工业用很多 基本可以(听不清)掉大部分场景 除非你是超长距离 比如说超过一百公尺 那个没办法 你可能要自己去设计天线 接下来讲我们这个 60G的evn 我们evn中 从60G出来之后 它改成这样一个形式 就是它是一个antenna board 加上一个carrier board 所以好处就是说 你的antenna board可以换 当然你有需要不同的antenna的时候 你就换成为antenna board就好了 然后carrierboard可以沿用 carrier board里面就放很多的接头 很多的一些界面 它的参数是这个样子 你可以看到这是我们 目前available的(听不清) 它这个是属于比较长距离的 所以可以看到它侦测距离在五十公尺 但是它的上下角度就比较 应该说它的这样子的 角度来说resolution比较好 上下的resolution就比较差 这个大概在年底就会出来一个,叫ods 这边有提到, overhead detection sensing 你可以看到它天线的长法 跟我的aop天线的长法 是一模一样的 所以它天线的场形是一个球形 代表是上下左右它都侦测 所以顾名思义,什么叫ods overhead,它是准备要 装在这个天花板上面 装载天花板往下侦测 因为往下侦测它就不分前后左右 将来我们也会有aop的一个 antenna board 它不是长这样子 它大概会长这个样子 就是一样是插在这个插槽上 我们来看一下carrier board 到底是在干什么 可以看到carrier board 里面有一大堆的界面 这边有一个xds100 的一个(听不清) 跟USB转UR 有人可能会问到 为什么它会有一个ftdi ftdi应该是在 ftdi是在这边 ftdi是为了来控制dca1000 像我们会有一个demo 就是接了dca去抓雷达的raw data 这个是ftdi 另外还有一堆, 这个60pin的collect 是拿来接antenna board 看到背面,背面还有这个叫做 launchpad connector 可以接TI的launchpad 我们看一下ecosystem 这是目前买得到的 将来会有一个ods的antenna board 如果你需要做poe 我刚才有提到 它后面有一个launchpad接头 可以拿来接一个430的launchpad 搭成poe的一个要求 因为我们刚才提过这个板子 有可能都是要放在天花板 所以供电,你不可能 另拉一条电源线 有可能直接用poe去供电 因为有可能要跟 你的surveillance接在一起 所以必须要有poe 这样的一个(听不清)在 这个是接dca1000 dca1000的capture card 接在这个地方 这边有另外一个USB转UR的 接头可以去控制它 之前我们如果要装 装那个raw data 我们还要买一块叫 dev(听不清)的东西 再接一个dca1000 其实还蛮啰嗦的 感觉又好像在学科无用的感觉 直接这样子接起来就行 我们讲的都是硬体,异变部分 其实我们发布的同时 就跟游戏机出来的时候 一定会搭配一大堆 游戏一样 我们的demo也都准备好了 这是area scanner 这个是用在6843 60G的 这个就是我们平常 侦测那个空间到底 哪边有人,哪边被占用 然后people counting也都在这个地方 people还要特别强调一下 就是我们在明年一月的时候 会把它移植到aop的板子上 而且还会去做随机的一个tracking 什么叫随机的tracking 它是准备放在天花板上 它可以侦测到人的身高 目前的demo纯粹就是平面的 你侦测到身高只是第一步而已 你会根据身高, 都会动物体的高度 来决定这个人的 可能是大人或小孩,或者是它跌倒 那这个在一些特殊的场合 就还蛮有用的 接下来就是,我们还有 一个叫做false detection 的mitigation 这东西是什么呢 向我们people counting 大家如果有看过我们demo就知道 它这种判别是不是一个人 为甚旁边的椅子不会 判断成这是一个人呢 因为它里面用了一个演算法 就是禁止太久的东西它就把它滤掉 可是室内有什么东西 会造成你误判呢 这边有一台电风扇 电风扇很可恶, 因为它一直在转 而且它会去吹其他地方 像它吹的叶子或者什么 就会造成很多的误判 可是我们有办法滤掉 为什么 因为讲到雷达会传回什么东西 速度、角度、距离 我们可以从速度去判断说 现在这东西动的合不合理 他速度太快了 它的转动速度太快了 这个东西大概不是人 我们可以把它滤掉 基本原理大概就是这个样子 还有gesture recognition 之前在1443有做过 就上下左右,可以 利用你的手势去操作
下面就由我来介绍industrial雷达的 make和update 其实各位很幸运 因为我们TI刚刚好在这个月月初 制了60GHz的雷达 各位在用雷达的时候,会想到 不管是老板还是自己 会想到的第一件事是什么 大部分都是说你们这个到底合不合法 会说你这个频段是OK的吗 用了会不会出问题 的确,regulation是一个很大的问题 大家也知道TI十年磨一剑 做了雷达 一开始是给车用客户的 因为77G的雷达 主要是用在车子 全世界,大概77G都通用 问题是你把车用雷达的 频段拿来做工业用 拿来做一般controller用 基本上是不太可以 世界上没有几个国家 是可以让你这么做的 所以呢,我们也知道这个问题 所以我们算是 且战且走 先推出工业用雷达 来focus一些可以用的市场 同时我们也慢慢的在做60G的雷达 终于,就在这个月初 我们把60G的雷达制作了 这边有一个60G雷达的一个开发板 最新的开发板 我传下去给各位看一下 可以看见它是一个两片式的组合 这个在台湾只有两片 就麻烦各位手下留情 对它温柔一点儿 这个其实在我们的网站上就有 有它的说明书跟用户手册 这个有得卖 这个待会儿会跟各位看一下 回到我刚刚的问题 第一件事大家就会问说 到底合不合法 我们来先看 全世界大概只有 日本用77G的雷达 用在车用以外是OK的 他们并没有限制 所以如果你的客户在日本 你可以选用TI的77G工业用雷达 没有问题 他们并没有这样的限制 如果在美国 美国就好玩了 美国,77G只允许装在所谓的 fluid level sensing 就是像油槽、化学槽、混凝土槽 你可以装那边 侦测那个液面的高度 而且他有规定,一定要往下打, 不可以往旁边打 他会怕你把电子波散进去 影响到其他的东西 因为美国有些绯安的设备 大概也是用这个频段 所以他规定是这个样子 至于其他的应用, 像people counting 或者是 工厂的avg啊, 那种自动设备,都不行 因为那个都有可能会往旁边打 会散进去,不行 在这种状况下,就只有60G 只有60G可以使用 我们在看其他的地方 欧洲,欧洲跟美国其实也差不多 但是欧洲 欧洲在77G的部分 有某些频段 是可以用的 现在我们讲77其实都是一个统称 所谓的77都是从76—81 67其实也是一个统称 60—64 各位要有这样的一个概念 在欧洲的话呢 某些77G可以 60是绝对没问题的 60是所谓的ism ben 就跟我们(听不清) 用的2.4G是一样的 那个是不需要去跟政府license 所以大家用的 所以你看到2.4G有WiFi 有蓝牙,还有一大堆 通通集成在2.4G 所以2.4G的信号很脏 常会有问题 所以才会,慢慢移到5G 偏偏5G传的距离又很短 将来比如说我们5G的行动网路 5G的行动网路,有些时候也会用到 二十几G的mmWave这个频段 所以各位可以知道 5G的基地台一定比现在4G要多很多 因为大家学过电视传播源知道嘛 频率越高,传的距离越短 虽然它的能量高 可是它的绕射跟 点射是比较不行的 那会想到 再请各位思考一个问题 为什么现在大家用24G 理论上说24G传的比60G或77G 还远 因为它的频率比较短 可是为什么 大家在网路上看到 如果是77G或60G 我们能够侦测的距离更长 所以我们想过这个问题 待会儿再跟各位讲为什么 我们接着往下看 China跟Korea 就是铁板硬块 77G完全不能用 这边台湾呢 台湾跟中国一样 其实一样的意思是说 我们没有规定到底可以用或不能用 没有明文规定 没有明文规定77G到底能用不能用 但是为了避免风险 将来东西卖出去了, 结果被人家说不合法 你要回收,这样就太划不来了 所以最安全的选择就是选60G 60G放纵四海皆准 都是OK的 当然我们先看一下 在TI 出60G之前 TI当然是有两个我们出了77G的sensor 刚刚就是有提到说我们的 (听不清)变化的一个准则 前面如果是a就是automotive 前面如果是i就是industrial 台湾跟中国一样,就是没有限制 就是没有明文规定可以或不可以 你看那个频谱 想那个ncc列出的一大张 什么频段谁用 但是在77G这个地方 他没有写 没有写清楚 所以你要用可以, 但是风险自负 TI原本就有77G 的solution 1443跟1642 再补充一下 1443跟1642, 前面这个是比较中阶的 因为它里面有dsp 我可以在里面做一些 比较高等的运算 当然,我们TI也不是 可以看一下, 基本上的应用就是这样子 1443可以看到所有的资料进来之后 经过这些处理 处理程序之后 它最多吐出来是什么 是point cloud 是点云 就是一个一个的点,侦测到多少点 每个点的距离、角度跟速度 它会给你 但是如果你要做一些 比较高等的侦测的话 比如说你要把好几个点 比如说一台车 一台车可能有五六个、 七八个甚至十几个反射点 它通通会报给你 在1443这样子的,通通报给你 你要是一判断说 到底它是不是同一个物体 那你要怎么判断呢 其实也很简单 如果这几个物体同时在移动 具有同时的位移、同样的 角度跟同样的速度 那这几个点大概就是同一个物体 没错吧 但是这个intelligent事实上是可以做在 做在我们的SOC里面的 你可以用dsp把它做clustering 甚至可以做tracking 最后呢,甚至你 还可以做classification classification很多人很有兴趣 就是说你要侦测人还是狗 怎么办 你让我分得出来 因为像很多做(听不清)的厂商 他们常常会误判 常常人走过去,camera照是OK的 可是同时小猫小狗走过去 或者只是风吹草动 它的camera就打开开始照相 就是代表说, 它没有办法做classification 分类 雷达,如果你写 高端一点的演算法的话 你根据点云多广 甚至点云长的形状 你稍微可以辨识一下 是什么样的东西 这当然是需要很多的尝试了 不过至少,你如果用的dsp的话 这些东西都是有可能的 那6G可以看到 也不是说从无到有 其实我们是从77G的产品 把它延伸过来 之前的1642现在变成叫6843 之后会有一个1443, 最后会有一个6443 基本上里面的东西大致一样 大致一样 但是呢,6843多了比较多的东西 第一个,它原本只有 两个transmitter天线 它现在三个 变成三个之后呢 不管是在角度的solution 或者是在做其他的, 想那个增加snr 用(听不清)去做 snr的技巧都会变好 另外它的记忆体也增加了 这个记忆体的增加其实很关键 就是说它的记忆体增加事实上是增加 R4这个地方 实际上你的R4 之前你在dsp,在这个1642时代呢 dsp它要负责来做fft的运算 因为它里面没有fft的加速器 但是到了18的时候 抱歉 到了6843的时候 fft的加速器也整进来了 就代表说dsp原本拿来计算fft的 computing power 现在可以把它构出来 你的dsp可以做更高端的事情 那设置它加的记忆体在R4上面 R4也可以做一些尝试 抱歉 可以直接进行演算法 其实像我们people counting的话 之前都有看过people counting的demo 里面有用到一个盐酸伐叫G trick G trick不是用在dsp上面的 G trick反而是用在R4上面的 我这样说事实上我也很讶异 事实上R4是有能力去 辅助dsp来R一些 比较高等的algorithm 可以看一下,这是它们的一些比较 你可以看到 6843,它的中频,已经提升到10MHz RAM也增加了 多了一个fft的加速器 另外它的transmitter天下又多了一根 6443基本上没有什么大改变 就是原本的76—81 现在把它换成60—64 大概是这个样子 抱歉,它的记忆体也增加了一些 其实它的R4现在可以用一些 比较高等的一些演算法 那我再把这个(听不清)再整理一下 6843就是之前的1642的下一代 里面的(听不清)是这个样子 我们已经发布了 十一月初的时候就已经发布了 正式量产是在明年的四月 同样的,这一颗呢 它的6443一样 它是focus在比较短 刚刚忘了讲 大概是在100公尺附近的应用 50公尺附近的话,只需要用这个 它一样,它一样的量产的 时间是在明年的四月 这边还有一个 神秘的... 这个cheaper是我们目前在规划中的 它事实上就是一个 它是focus在show range 但是它主要的目的是拿来做 PI或(听不清)的replacement 我们有一个很大的 (听不清)想要把 超音波给干掉 各位车子都有倒车雷达,对吧 你的车子有几颗倒车雷达 少说会有两颗 有的比较高档还会有四颗 甚至六颗 前面还要加好几颗, 很丑的,还要挖洞 为什么呢 因为超音波的侦测距离很短 大概不到5公尺 而且它的角度很窄 它的角度很窄 所以为什么装那么多颗 超音波呢 因为它的角度很窄 必须装多一点,才能 侦测到各个角度 但是雷达没这个问题 雷达的侦测距离又长 15公尺已经够了吧 就算你不小心误踩油门 15公尺应该也有时间 让你反应并且刹住 而且它的角度很广 那是跟你天线的设计有关系 但是至少可以到150—160以上 所以可以用这个雷达 也不是说一颗比一颗 当然是雷达比不上 超音波那么便宜 但是你一颗可以取代四颗 就很多人很有兴趣 而且雷达除了做倒车以外 它可能还可以做些额外的 像盲点侦测 都可以整合在同一根雷达上面 另外,一个最大的重点 就是它除了是low power之外 它还是low cost 这个cost 基本上是可以 可以匹敌到四五颗超音波 跟它大概一样的价钱, 这样子的一个等级 那这边有看到一个叫aop 叫做antenna on package 我们拜访了那么多颗 其实我们常遇到 客户最大的问题 第一个就是客户没有 设计天线的人才 这是第一点 第二点 就算他有设计天线的人才 他没有测试天线的仪器 因为77G,60G的频率太高频了 买那种高频的仪器 动则都是上千万 那就有可能受不了 第三个最难的就是 客户可能没有办法写一些演算法 没关系,TI都听到了,所以 我们就除了aop这个东西 所谓的aop呢 我们直接把天线做在 我们的package上面 所以这就很大程度解决客户的问题 客户自己不需要design天线 不用测试天线 他只要专心写他的演算法就好了 这个是我们把这几个 这是我们目前现有的产品 现有的我们已经raise6843 以及6843aop 这个aop我们准备在 明年的一月就会demo出来 其实各位现在在我们官网上 已经看到这个制出来了 只是你点进去还是空的 一样的,我们在6443 就是比较中阶的一样会有aop 这地方有提到这个神秘的cheap 一样会有个aop出来 那还有一个呢 就是awr1843 刚刚有提到 有个awr1843 那我们可能会出也可能不会出 因为这一颗是77G的 我们要看客户的需求 才会决定去说会不会把 这颗正式的relate出来 其实要relate出来也很简单 只要把awr改一改就行 awr1843的测试过程 可能还比iwr严谨 因为所有的车用的 温度都是-40—120℃ 工业用主-40—105而已 不用再过车规认证 我们很快就可以拿来易于二次的 主要是因为它还是77G的 我们现在看起来77G的 市场在工业上并不是很吃香 所这个是看状况 我们来讲一下aop 这个就是我们aop的trip 这个是77G的(听不清) 这边各位可能看不到 这边有四个solo天线跟 三个follow天线在这个地方 强调一下,这是77G的(听不清) 不是60G的 60G的天线会长这个样子 这边三个follow天线 四个solo天线 所以它的天线的virtual antenna的 场形会长成这个样子 aop到底会带给客户什么好处呢 很明显的就是第一个 你的PCB的design会变得简单 因为我们现在的,各位看到刚刚那个 板子 我们现在是antenna on PCB对吧 我们也不能随便乱做 PCB的材料是(听不清)什么东西 那个其实还蛮贵的 可是如果你用aop的话 你用很简单的材料 去做你的PCB都行 所以这会省掉很大... 我们自己内部评估过 大概可以省六元钱 第二个 你的那个开发时长, 所以更不用设计天线 你不用测天线 至少可以赚到. 3—6个月的开发时长 第二点,你aop做上去之后 其实你可以做很小的trip 因为天线都已经长到package上面 可以注入很小的model 这边有看到,百分之 系数small learning on 24MHz 40%比aop的还要小 另外还有个好处就是说 因为它直接aop了 所以它之间的接线 是距离是很短的 所以几乎没有所谓的 conduction的nose 它的(听不清)反而比你天线做在 PCB板上还要高 意思就是,比你自己 做天线延伸的更远 当然,以同样的天线 patent比较是这个样子 但是天线自己设计的话, 你可以根据不同的应用 去做不同天线的设计 你要打得远的或者打得广的 那个就没有办法 那个就没办法用aop做出来 天线就固定在那边 客户如果有天线的需求 有自己design天线的需求, 那就要麻烦客户 用(听不清)aop的 他自己去设计天线 这个东西其实已经发布了 就刚才提到 我们在测试,就明年的一月九日 会demo simple的话在2Q,就可以拿到simple 这边有一个小小的图 就是一个case trip 你可以看出来,这个model那么小 这个大概是2.2 x 2.3公分 然后再aop这个 package大概是1.5 x 1.5公分 这个是aop的一些performers 你可以看的到 我们aop目前设计的是一个广角的 就是说它的fov 上下一百六十度,左右一百六十度 很广 它的侦测距离 各位在问侦测距离的时候 一定要知道一件事,就是 到底是侦测什么东西 因为侦测人、侦测车或侦测小狗 那个侦测距离是完全不一样 主要是因为result us, 就是result code section 换句话来说,就是反射的强度 所以以人来讲 它可以侦测到五十度正前方 如果左右六十度的话 在三十公尺 八十度的话是十五公尺 如果是车子的话 可以到几乎是两倍 我们里面还可以用一个技巧 就是类似像 been forming这样子的技巧 并不是真的been forming 因为目前还没有 资源这个been forming 我们叫做bpm, binary的phase modulation 利用那个技巧,大概还能增加30% 所以大概从五十提升到六十五 bpm可以增加一些snr 所以可以用你的距离进一步提升 基本上这样子的一个东西 已经符合工业用很多 基本可以(听不清)掉大部分场景 除非你是超长距离 比如说超过一百公尺 那个没办法 你可能要自己去设计天线 接下来讲我们这个 60G的evn 我们evn中 从60G出来之后 它改成这样一个形式 就是它是一个antenna board 加上一个carrier board 所以好处就是说 你的antenna board可以换 当然你有需要不同的antenna的时候 你就换成为antenna board就好了 然后carrierboard可以沿用 carrier board里面就放很多的接头 很多的一些界面 它的参数是这个样子 你可以看到这是我们 目前available的(听不清) 它这个是属于比较长距离的 所以可以看到它侦测距离在五十公尺 但是它的上下角度就比较 应该说它的这样子的 角度来说resolution比较好 上下的resolution就比较差 这个大概在年底就会出来一个,叫ods 这边有提到, overhead detection sensing 你可以看到它天线的长法 跟我的aop天线的长法 是一模一样的 所以它天线的场形是一个球形 代表是上下左右它都侦测 所以顾名思义,什么叫ods overhead,它是准备要 装在这个天花板上面 装载天花板往下侦测 因为往下侦测它就不分前后左右 将来我们也会有aop的一个 antenna board 它不是长这样子 它大概会长这个样子 就是一样是插在这个插槽上 我们来看一下carrier board 到底是在干什么 可以看到carrier board 里面有一大堆的界面 这边有一个xds100 的一个(听不清) 跟USB转UR 有人可能会问到 为什么它会有一个ftdi ftdi应该是在 ftdi是在这边 ftdi是为了来控制dca1000 像我们会有一个demo 就是接了dca去抓雷达的raw data 这个是ftdi 另外还有一堆, 这个60pin的collect 是拿来接antenna board 看到背面,背面还有这个叫做 launchpad connector 可以接TI的launchpad 我们看一下ecosystem 这是目前买得到的 将来会有一个ods的antenna board 如果你需要做poe 我刚才有提到 它后面有一个launchpad接头 可以拿来接一个430的launchpad 搭成poe的一个要求 因为我们刚才提过这个板子 有可能都是要放在天花板 所以供电,你不可能 另拉一条电源线 有可能直接用poe去供电 因为有可能要跟 你的surveillance接在一起 所以必须要有poe 这样的一个(听不清)在 这个是接dca1000 dca1000的capture card 接在这个地方 这边有另外一个USB转UR的 接头可以去控制它 之前我们如果要装 装那个raw data 我们还要买一块叫 dev(听不清)的东西 再接一个dca1000 其实还蛮啰嗦的 感觉又好像在学科无用的感觉 直接这样子接起来就行 我们讲的都是硬体,异变部分 其实我们发布的同时 就跟游戏机出来的时候 一定会搭配一大堆 游戏一样 我们的demo也都准备好了 这是area scanner 这个是用在6843 60G的 这个就是我们平常 侦测那个空间到底 哪边有人,哪边被占用 然后people counting也都在这个地方 people还要特别强调一下 就是我们在明年一月的时候 会把它移植到aop的板子上 而且还会去做随机的一个tracking 什么叫随机的tracking 它是准备放在天花板上 它可以侦测到人的身高 目前的demo纯粹就是平面的 你侦测到身高只是第一步而已 你会根据身高, 都会动物体的高度 来决定这个人的 可能是大人或小孩,或者是它跌倒 那这个在一些特殊的场合 就还蛮有用的 接下来就是,我们还有 一个叫做false detection 的mitigation 这东西是什么呢 向我们people counting 大家如果有看过我们demo就知道 它这种判别是不是一个人 为甚旁边的椅子不会 判断成这是一个人呢 因为它里面用了一个演算法 就是禁止太久的东西它就把它滤掉 可是室内有什么东西 会造成你误判呢 这边有一台电风扇 电风扇很可恶, 因为它一直在转 而且它会去吹其他地方 像它吹的叶子或者什么 就会造成很多的误判 可是我们有办法滤掉 为什么 因为讲到雷达会传回什么东西 速度、角度、距离 我们可以从速度去判断说 现在这东西动的合不合理 他速度太快了 它的转动速度太快了 这个东西大概不是人 我们可以把它滤掉 基本原理大概就是这个样子 还有gesture recognition 之前在1443有做过 就上下左右,可以 利用你的手势去操作
下面就由我来介绍industrial雷达的
make和update
其实各位很幸运
因为我们TI刚刚好在这个月月初
制了60GHz的雷达
各位在用雷达的时候,会想到
不管是老板还是自己
会想到的第一件事是什么
大部分都是说你们这个到底合不合法
会说你这个频段是OK的吗
用了会不会出问题
的确,regulation是一个很大的问题
大家也知道TI十年磨一剑
做了雷达
一开始是给车用客户的
因为77G的雷达
主要是用在车子
全世界,大概77G都通用
问题是你把车用雷达的 频段拿来做工业用
拿来做一般controller用
基本上是不太可以
世界上没有几个国家 是可以让你这么做的
所以呢,我们也知道这个问题
所以我们算是
且战且走
先推出工业用雷达
来focus一些可以用的市场
同时我们也慢慢的在做60G的雷达
终于,就在这个月初
我们把60G的雷达制作了
这边有一个60G雷达的一个开发板
最新的开发板
我传下去给各位看一下
可以看见它是一个两片式的组合
这个在台湾只有两片
就麻烦各位手下留情
对它温柔一点儿
这个其实在我们的网站上就有
有它的说明书跟用户手册
这个有得卖
这个待会儿会跟各位看一下
回到我刚刚的问题
第一件事大家就会问说
到底合不合法
我们来先看
全世界大概只有 日本用77G的雷达
用在车用以外是OK的
他们并没有限制
所以如果你的客户在日本
你可以选用TI的77G工业用雷达
没有问题
他们并没有这样的限制
如果在美国
美国就好玩了
美国,77G只允许装在所谓的
fluid level sensing
就是像油槽、化学槽、混凝土槽
你可以装那边
侦测那个液面的高度
而且他有规定,一定要往下打, 不可以往旁边打
他会怕你把电子波散进去
影响到其他的东西
因为美国有些绯安的设备
大概也是用这个频段
所以他规定是这个样子
至于其他的应用, 像people counting
或者是
工厂的avg啊, 那种自动设备,都不行
因为那个都有可能会往旁边打
会散进去,不行
在这种状况下,就只有60G
只有60G可以使用
我们在看其他的地方
欧洲,欧洲跟美国其实也差不多
但是欧洲
欧洲在77G的部分 有某些频段
是可以用的
现在我们讲77其实都是一个统称
所谓的77都是从76—81
67其实也是一个统称
60—64
各位要有这样的一个概念
在欧洲的话呢
某些77G可以
60是绝对没问题的
60是所谓的ism ben
就跟我们(听不清) 用的2.4G是一样的
那个是不需要去跟政府license
所以大家用的
所以你看到2.4G有WiFi
有蓝牙,还有一大堆 通通集成在2.4G
所以2.4G的信号很脏
常会有问题
所以才会,慢慢移到5G
偏偏5G传的距离又很短
将来比如说我们5G的行动网路
5G的行动网路,有些时候也会用到
二十几G的mmWave这个频段
所以各位可以知道
5G的基地台一定比现在4G要多很多
因为大家学过电视传播源知道嘛
频率越高,传的距离越短
虽然它的能量高
可是它的绕射跟
点射是比较不行的
那会想到
再请各位思考一个问题
为什么现在大家用24G
理论上说24G传的比60G或77G
还远
因为它的频率比较短
可是为什么
大家在网路上看到
如果是77G或60G
我们能够侦测的距离更长
所以我们想过这个问题
待会儿再跟各位讲为什么
我们接着往下看
China跟Korea
就是铁板硬块
77G完全不能用
这边台湾呢
台湾跟中国一样
其实一样的意思是说
我们没有规定到底可以用或不能用
没有明文规定
没有明文规定77G到底能用不能用
但是为了避免风险
将来东西卖出去了, 结果被人家说不合法
你要回收,这样就太划不来了
所以最安全的选择就是选60G
60G放纵四海皆准
都是OK的
当然我们先看一下
在TI 出60G之前
TI当然是有两个我们出了77G的sensor
刚刚就是有提到说我们的 (听不清)变化的一个准则
前面如果是a就是automotive
前面如果是i就是industrial
台湾跟中国一样,就是没有限制
就是没有明文规定可以或不可以
你看那个频谱
想那个ncc列出的一大张
什么频段谁用
但是在77G这个地方
他没有写
没有写清楚
所以你要用可以, 但是风险自负
TI原本就有77G 的solution
1443跟1642
再补充一下
1443跟1642, 前面这个是比较中阶的
因为它里面有dsp
我可以在里面做一些 比较高等的运算
当然,我们TI也不是
可以看一下, 基本上的应用就是这样子
1443可以看到所有的资料进来之后
经过这些处理
处理程序之后
它最多吐出来是什么
是point cloud
是点云
就是一个一个的点,侦测到多少点
每个点的距离、角度跟速度
它会给你
但是如果你要做一些 比较高等的侦测的话
比如说你要把好几个点
比如说一台车
一台车可能有五六个、 七八个甚至十几个反射点
它通通会报给你
在1443这样子的,通通报给你
你要是一判断说
到底它是不是同一个物体
那你要怎么判断呢
其实也很简单
如果这几个物体同时在移动
具有同时的位移、同样的 角度跟同样的速度
那这几个点大概就是同一个物体
没错吧
但是这个intelligent事实上是可以做在
做在我们的SOC里面的
你可以用dsp把它做clustering
甚至可以做tracking
最后呢,甚至你 还可以做classification
classification很多人很有兴趣
就是说你要侦测人还是狗
怎么办
你让我分得出来
因为像很多做(听不清)的厂商
他们常常会误判
常常人走过去,camera照是OK的
可是同时小猫小狗走过去
或者只是风吹草动
它的camera就打开开始照相
就是代表说, 它没有办法做classification
分类
雷达,如果你写 高端一点的演算法的话
你根据点云多广
甚至点云长的形状
你稍微可以辨识一下
是什么样的东西
这当然是需要很多的尝试了
不过至少,你如果用的dsp的话
这些东西都是有可能的
那6G可以看到
也不是说从无到有
其实我们是从77G的产品
把它延伸过来
之前的1642现在变成叫6843
之后会有一个1443, 最后会有一个6443
基本上里面的东西大致一样
大致一样
但是呢,6843多了比较多的东西
第一个,它原本只有 两个transmitter天线
它现在三个
变成三个之后呢
不管是在角度的solution
或者是在做其他的, 想那个增加snr
用(听不清)去做 snr的技巧都会变好
另外它的记忆体也增加了
这个记忆体的增加其实很关键
就是说它的记忆体增加事实上是增加
R4这个地方
实际上你的R4
之前你在dsp,在这个1642时代呢
dsp它要负责来做fft的运算
因为它里面没有fft的加速器
但是到了18的时候
抱歉
到了6843的时候
fft的加速器也整进来了
就代表说dsp原本拿来计算fft的
computing power 现在可以把它构出来
你的dsp可以做更高端的事情
那设置它加的记忆体在R4上面
R4也可以做一些尝试
抱歉
可以直接进行演算法
其实像我们people counting的话
之前都有看过people counting的demo
里面有用到一个盐酸伐叫G trick
G trick不是用在dsp上面的
G trick反而是用在R4上面的
我这样说事实上我也很讶异
事实上R4是有能力去 辅助dsp来R一些
比较高等的algorithm
可以看一下,这是它们的一些比较
你可以看到
6843,它的中频,已经提升到10MHz
RAM也增加了
多了一个fft的加速器
另外它的transmitter天下又多了一根
6443基本上没有什么大改变
就是原本的76—81
现在把它换成60—64
大概是这个样子
抱歉,它的记忆体也增加了一些
其实它的R4现在可以用一些 比较高等的一些演算法
那我再把这个(听不清)再整理一下
6843就是之前的1642的下一代
里面的(听不清)是这个样子
我们已经发布了
十一月初的时候就已经发布了
正式量产是在明年的四月
同样的,这一颗呢
它的6443一样
它是focus在比较短
刚刚忘了讲
大概是在100公尺附近的应用
50公尺附近的话,只需要用这个
它一样,它一样的量产的 时间是在明年的四月
这边还有一个
神秘的...
这个cheaper是我们目前在规划中的
它事实上就是一个
它是focus在show range
但是它主要的目的是拿来做 PI或(听不清)的replacement
我们有一个很大的 (听不清)想要把
超音波给干掉
各位车子都有倒车雷达,对吧
你的车子有几颗倒车雷达
少说会有两颗
有的比较高档还会有四颗
甚至六颗
前面还要加好几颗, 很丑的,还要挖洞
为什么呢
因为超音波的侦测距离很短
大概不到5公尺
而且它的角度很窄
它的角度很窄
所以为什么装那么多颗
超音波呢
因为它的角度很窄
必须装多一点,才能 侦测到各个角度
但是雷达没这个问题
雷达的侦测距离又长
15公尺已经够了吧
就算你不小心误踩油门
15公尺应该也有时间 让你反应并且刹住
而且它的角度很广
那是跟你天线的设计有关系
但是至少可以到150—160以上
所以可以用这个雷达
也不是说一颗比一颗
当然是雷达比不上 超音波那么便宜
但是你一颗可以取代四颗
就很多人很有兴趣
而且雷达除了做倒车以外
它可能还可以做些额外的
像盲点侦测
都可以整合在同一根雷达上面
另外,一个最大的重点 就是它除了是low power之外
它还是low cost
这个cost
基本上是可以
可以匹敌到四五颗超音波
跟它大概一样的价钱, 这样子的一个等级
那这边有看到一个叫aop
叫做antenna on package
我们拜访了那么多颗
其实我们常遇到
客户最大的问题
第一个就是客户没有 设计天线的人才
这是第一点
第二点
就算他有设计天线的人才
他没有测试天线的仪器
因为77G,60G的频率太高频了
买那种高频的仪器
动则都是上千万
那就有可能受不了
第三个最难的就是
客户可能没有办法写一些演算法
没关系,TI都听到了,所以
我们就除了aop这个东西
所谓的aop呢
我们直接把天线做在 我们的package上面
所以这就很大程度解决客户的问题
客户自己不需要design天线
不用测试天线
他只要专心写他的演算法就好了
这个是我们把这几个
这是我们目前现有的产品
现有的我们已经raise6843
以及6843aop
这个aop我们准备在 明年的一月就会demo出来
其实各位现在在我们官网上
已经看到这个制出来了
只是你点进去还是空的
一样的,我们在6443
就是比较中阶的一样会有aop
这地方有提到这个神秘的cheap
一样会有个aop出来
那还有一个呢
就是awr1843
刚刚有提到
有个awr1843
那我们可能会出也可能不会出
因为这一颗是77G的
我们要看客户的需求
才会决定去说会不会把 这颗正式的relate出来
其实要relate出来也很简单
只要把awr改一改就行
awr1843的测试过程
可能还比iwr严谨
因为所有的车用的
温度都是-40—120℃
工业用主-40—105而已
不用再过车规认证
我们很快就可以拿来易于二次的
主要是因为它还是77G的
我们现在看起来77G的 市场在工业上并不是很吃香
所这个是看状况
我们来讲一下aop
这个就是我们aop的trip
这个是77G的(听不清)
这边各位可能看不到
这边有四个solo天线跟 三个follow天线在这个地方
强调一下,这是77G的(听不清)
不是60G的
60G的天线会长这个样子
这边三个follow天线
四个solo天线
所以它的天线的virtual antenna的 场形会长成这个样子
aop到底会带给客户什么好处呢
很明显的就是第一个
你的PCB的design会变得简单
因为我们现在的,各位看到刚刚那个
板子
我们现在是antenna on PCB对吧
我们也不能随便乱做
PCB的材料是(听不清)什么东西
那个其实还蛮贵的
可是如果你用aop的话
你用很简单的材料
去做你的PCB都行
所以这会省掉很大...
我们自己内部评估过
大概可以省六元钱
第二个
你的那个开发时长, 所以更不用设计天线
你不用测天线
至少可以赚到. 3—6个月的开发时长
第二点,你aop做上去之后
其实你可以做很小的trip
因为天线都已经长到package上面
可以注入很小的model
这边有看到,百分之 系数small learning on 24MHz
40%比aop的还要小
另外还有个好处就是说
因为它直接aop了
所以它之间的接线 是距离是很短的
所以几乎没有所谓的 conduction的nose
它的(听不清)反而比你天线做在
PCB板上还要高
意思就是,比你自己 做天线延伸的更远
当然,以同样的天线 patent比较是这个样子
但是天线自己设计的话, 你可以根据不同的应用
去做不同天线的设计
你要打得远的或者打得广的
那个就没有办法
那个就没办法用aop做出来
天线就固定在那边
客户如果有天线的需求
有自己design天线的需求, 那就要麻烦客户
用(听不清)aop的
他自己去设计天线
这个东西其实已经发布了
就刚才提到
我们在测试,就明年的一月九日
会demo
simple的话在2Q,就可以拿到simple
这边有一个小小的图
就是一个case trip
你可以看出来,这个model那么小
这个大概是2.2 x 2.3公分
然后再aop这个 package大概是1.5 x 1.5公分
这个是aop的一些performers
你可以看的到
我们aop目前设计的是一个广角的
就是说它的fov
上下一百六十度,左右一百六十度
很广
它的侦测距离
各位在问侦测距离的时候
一定要知道一件事,就是 到底是侦测什么东西
因为侦测人、侦测车或侦测小狗
那个侦测距离是完全不一样
主要是因为result us, 就是result code section
换句话来说,就是反射的强度
所以以人来讲
它可以侦测到五十度正前方
如果左右六十度的话
在三十公尺
八十度的话是十五公尺
如果是车子的话
可以到几乎是两倍
我们里面还可以用一个技巧
就是类似像 been forming这样子的技巧
并不是真的been forming
因为目前还没有 资源这个been forming
我们叫做bpm, binary的phase modulation
利用那个技巧,大概还能增加30%
所以大概从五十提升到六十五
bpm可以增加一些snr
所以可以用你的距离进一步提升
基本上这样子的一个东西
已经符合工业用很多
基本可以(听不清)掉大部分场景
除非你是超长距离
比如说超过一百公尺
那个没办法
你可能要自己去设计天线
接下来讲我们这个
60G的evn
我们evn中
从60G出来之后
它改成这样一个形式
就是它是一个antenna board 加上一个carrier board
所以好处就是说
你的antenna board可以换
当然你有需要不同的antenna的时候
你就换成为antenna board就好了
然后carrierboard可以沿用
carrier board里面就放很多的接头
很多的一些界面
它的参数是这个样子
你可以看到这是我们 目前available的(听不清)
它这个是属于比较长距离的
所以可以看到它侦测距离在五十公尺
但是它的上下角度就比较
应该说它的这样子的 角度来说resolution比较好
上下的resolution就比较差
这个大概在年底就会出来一个,叫ods
这边有提到, overhead detection sensing
你可以看到它天线的长法 跟我的aop天线的长法
是一模一样的
所以它天线的场形是一个球形
代表是上下左右它都侦测
所以顾名思义,什么叫ods
overhead,它是准备要 装在这个天花板上面
装载天花板往下侦测
因为往下侦测它就不分前后左右
将来我们也会有aop的一个
antenna board
它不是长这样子
它大概会长这个样子
就是一样是插在这个插槽上
我们来看一下carrier board 到底是在干什么
可以看到carrier board 里面有一大堆的界面
这边有一个xds100 的一个(听不清)
跟USB转UR
有人可能会问到 为什么它会有一个ftdi
ftdi应该是在
ftdi是在这边
ftdi是为了来控制dca1000
像我们会有一个demo
就是接了dca去抓雷达的raw data
这个是ftdi
另外还有一堆, 这个60pin的collect
是拿来接antenna board
看到背面,背面还有这个叫做
launchpad connector
可以接TI的launchpad
我们看一下ecosystem
这是目前买得到的
将来会有一个ods的antenna board
如果你需要做poe
我刚才有提到
它后面有一个launchpad接头
可以拿来接一个430的launchpad
搭成poe的一个要求
因为我们刚才提过这个板子
有可能都是要放在天花板
所以供电,你不可能 另拉一条电源线
有可能直接用poe去供电
因为有可能要跟 你的surveillance接在一起
所以必须要有poe 这样的一个(听不清)在
这个是接dca1000
dca1000的capture card
接在这个地方
这边有另外一个USB转UR的
接头可以去控制它
之前我们如果要装
装那个raw data
我们还要买一块叫 dev(听不清)的东西
再接一个dca1000
其实还蛮啰嗦的
感觉又好像在学科无用的感觉
直接这样子接起来就行
我们讲的都是硬体,异变部分
其实我们发布的同时
就跟游戏机出来的时候 一定会搭配一大堆
游戏一样
我们的demo也都准备好了
这是area scanner
这个是用在6843 60G的
这个就是我们平常 侦测那个空间到底
哪边有人,哪边被占用
然后people counting也都在这个地方
people还要特别强调一下
就是我们在明年一月的时候
会把它移植到aop的板子上
而且还会去做随机的一个tracking
什么叫随机的tracking
它是准备放在天花板上
它可以侦测到人的身高
目前的demo纯粹就是平面的
你侦测到身高只是第一步而已
你会根据身高, 都会动物体的高度
来决定这个人的
可能是大人或小孩,或者是它跌倒
那这个在一些特殊的场合
就还蛮有用的
接下来就是,我们还有 一个叫做false detection
的mitigation
这东西是什么呢
向我们people counting
大家如果有看过我们demo就知道
它这种判别是不是一个人
为甚旁边的椅子不会 判断成这是一个人呢
因为它里面用了一个演算法
就是禁止太久的东西它就把它滤掉
可是室内有什么东西
会造成你误判呢
这边有一台电风扇
电风扇很可恶, 因为它一直在转
而且它会去吹其他地方
像它吹的叶子或者什么
就会造成很多的误判
可是我们有办法滤掉
为什么
因为讲到雷达会传回什么东西
速度、角度、距离
我们可以从速度去判断说
现在这东西动的合不合理
他速度太快了
它的转动速度太快了
这个东西大概不是人
我们可以把它滤掉
基本原理大概就是这个样子
还有gesture recognition
之前在1443有做过
就上下左右,可以 利用你的手势去操作
下面就由我来介绍industrial雷达的 make和update 其实各位很幸运 因为我们TI刚刚好在这个月月初 制了60GHz的雷达 各位在用雷达的时候,会想到 不管是老板还是自己 会想到的第一件事是什么 大部分都是说你们这个到底合不合法 会说你这个频段是OK的吗 用了会不会出问题 的确,regulation是一个很大的问题 大家也知道TI十年磨一剑 做了雷达 一开始是给车用客户的 因为77G的雷达 主要是用在车子 全世界,大概77G都通用 问题是你把车用雷达的 频段拿来做工业用 拿来做一般controller用 基本上是不太可以 世界上没有几个国家 是可以让你这么做的 所以呢,我们也知道这个问题 所以我们算是 且战且走 先推出工业用雷达 来focus一些可以用的市场 同时我们也慢慢的在做60G的雷达 终于,就在这个月初 我们把60G的雷达制作了 这边有一个60G雷达的一个开发板 最新的开发板 我传下去给各位看一下 可以看见它是一个两片式的组合 这个在台湾只有两片 就麻烦各位手下留情 对它温柔一点儿 这个其实在我们的网站上就有 有它的说明书跟用户手册 这个有得卖 这个待会儿会跟各位看一下 回到我刚刚的问题 第一件事大家就会问说 到底合不合法 我们来先看 全世界大概只有 日本用77G的雷达 用在车用以外是OK的 他们并没有限制 所以如果你的客户在日本 你可以选用TI的77G工业用雷达 没有问题 他们并没有这样的限制 如果在美国 美国就好玩了 美国,77G只允许装在所谓的 fluid level sensing 就是像油槽、化学槽、混凝土槽 你可以装那边 侦测那个液面的高度 而且他有规定,一定要往下打, 不可以往旁边打 他会怕你把电子波散进去 影响到其他的东西 因为美国有些绯安的设备 大概也是用这个频段 所以他规定是这个样子 至于其他的应用, 像people counting 或者是 工厂的avg啊, 那种自动设备,都不行 因为那个都有可能会往旁边打 会散进去,不行 在这种状况下,就只有60G 只有60G可以使用 我们在看其他的地方 欧洲,欧洲跟美国其实也差不多 但是欧洲 欧洲在77G的部分 有某些频段 是可以用的 现在我们讲77其实都是一个统称 所谓的77都是从76—81 67其实也是一个统称 60—64 各位要有这样的一个概念 在欧洲的话呢 某些77G可以 60是绝对没问题的 60是所谓的ism ben 就跟我们(听不清) 用的2.4G是一样的 那个是不需要去跟政府license 所以大家用的 所以你看到2.4G有WiFi 有蓝牙,还有一大堆 通通集成在2.4G 所以2.4G的信号很脏 常会有问题 所以才会,慢慢移到5G 偏偏5G传的距离又很短 将来比如说我们5G的行动网路 5G的行动网路,有些时候也会用到 二十几G的mmWave这个频段 所以各位可以知道 5G的基地台一定比现在4G要多很多 因为大家学过电视传播源知道嘛 频率越高,传的距离越短 虽然它的能量高 可是它的绕射跟 点射是比较不行的 那会想到 再请各位思考一个问题 为什么现在大家用24G 理论上说24G传的比60G或77G 还远 因为它的频率比较短 可是为什么 大家在网路上看到 如果是77G或60G 我们能够侦测的距离更长 所以我们想过这个问题 待会儿再跟各位讲为什么 我们接着往下看 China跟Korea 就是铁板硬块 77G完全不能用 这边台湾呢 台湾跟中国一样 其实一样的意思是说 我们没有规定到底可以用或不能用 没有明文规定 没有明文规定77G到底能用不能用 但是为了避免风险 将来东西卖出去了, 结果被人家说不合法 你要回收,这样就太划不来了 所以最安全的选择就是选60G 60G放纵四海皆准 都是OK的 当然我们先看一下 在TI 出60G之前 TI当然是有两个我们出了77G的sensor 刚刚就是有提到说我们的 (听不清)变化的一个准则 前面如果是a就是automotive 前面如果是i就是industrial 台湾跟中国一样,就是没有限制 就是没有明文规定可以或不可以 你看那个频谱 想那个ncc列出的一大张 什么频段谁用 但是在77G这个地方 他没有写 没有写清楚 所以你要用可以, 但是风险自负 TI原本就有77G 的solution 1443跟1642 再补充一下 1443跟1642, 前面这个是比较中阶的 因为它里面有dsp 我可以在里面做一些 比较高等的运算 当然,我们TI也不是 可以看一下, 基本上的应用就是这样子 1443可以看到所有的资料进来之后 经过这些处理 处理程序之后 它最多吐出来是什么 是point cloud 是点云 就是一个一个的点,侦测到多少点 每个点的距离、角度跟速度 它会给你 但是如果你要做一些 比较高等的侦测的话 比如说你要把好几个点 比如说一台车 一台车可能有五六个、 七八个甚至十几个反射点 它通通会报给你 在1443这样子的,通通报给你 你要是一判断说 到底它是不是同一个物体 那你要怎么判断呢 其实也很简单 如果这几个物体同时在移动 具有同时的位移、同样的 角度跟同样的速度 那这几个点大概就是同一个物体 没错吧 但是这个intelligent事实上是可以做在 做在我们的SOC里面的 你可以用dsp把它做clustering 甚至可以做tracking 最后呢,甚至你 还可以做classification classification很多人很有兴趣 就是说你要侦测人还是狗 怎么办 你让我分得出来 因为像很多做(听不清)的厂商 他们常常会误判 常常人走过去,camera照是OK的 可是同时小猫小狗走过去 或者只是风吹草动 它的camera就打开开始照相 就是代表说, 它没有办法做classification 分类 雷达,如果你写 高端一点的演算法的话 你根据点云多广 甚至点云长的形状 你稍微可以辨识一下 是什么样的东西 这当然是需要很多的尝试了 不过至少,你如果用的dsp的话 这些东西都是有可能的 那6G可以看到 也不是说从无到有 其实我们是从77G的产品 把它延伸过来 之前的1642现在变成叫6843 之后会有一个1443, 最后会有一个6443 基本上里面的东西大致一样 大致一样 但是呢,6843多了比较多的东西 第一个,它原本只有 两个transmitter天线 它现在三个 变成三个之后呢 不管是在角度的solution 或者是在做其他的, 想那个增加snr 用(听不清)去做 snr的技巧都会变好 另外它的记忆体也增加了 这个记忆体的增加其实很关键 就是说它的记忆体增加事实上是增加 R4这个地方 实际上你的R4 之前你在dsp,在这个1642时代呢 dsp它要负责来做fft的运算 因为它里面没有fft的加速器 但是到了18的时候 抱歉 到了6843的时候 fft的加速器也整进来了 就代表说dsp原本拿来计算fft的 computing power 现在可以把它构出来 你的dsp可以做更高端的事情 那设置它加的记忆体在R4上面 R4也可以做一些尝试 抱歉 可以直接进行演算法 其实像我们people counting的话 之前都有看过people counting的demo 里面有用到一个盐酸伐叫G trick G trick不是用在dsp上面的 G trick反而是用在R4上面的 我这样说事实上我也很讶异 事实上R4是有能力去 辅助dsp来R一些 比较高等的algorithm 可以看一下,这是它们的一些比较 你可以看到 6843,它的中频,已经提升到10MHz RAM也增加了 多了一个fft的加速器 另外它的transmitter天下又多了一根 6443基本上没有什么大改变 就是原本的76—81 现在把它换成60—64 大概是这个样子 抱歉,它的记忆体也增加了一些 其实它的R4现在可以用一些 比较高等的一些演算法 那我再把这个(听不清)再整理一下 6843就是之前的1642的下一代 里面的(听不清)是这个样子 我们已经发布了 十一月初的时候就已经发布了 正式量产是在明年的四月 同样的,这一颗呢 它的6443一样 它是focus在比较短 刚刚忘了讲 大概是在100公尺附近的应用 50公尺附近的话,只需要用这个 它一样,它一样的量产的 时间是在明年的四月 这边还有一个 神秘的... 这个cheaper是我们目前在规划中的 它事实上就是一个 它是focus在show range 但是它主要的目的是拿来做 PI或(听不清)的replacement 我们有一个很大的 (听不清)想要把 超音波给干掉 各位车子都有倒车雷达,对吧 你的车子有几颗倒车雷达 少说会有两颗 有的比较高档还会有四颗 甚至六颗 前面还要加好几颗, 很丑的,还要挖洞 为什么呢 因为超音波的侦测距离很短 大概不到5公尺 而且它的角度很窄 它的角度很窄 所以为什么装那么多颗 超音波呢 因为它的角度很窄 必须装多一点,才能 侦测到各个角度 但是雷达没这个问题 雷达的侦测距离又长 15公尺已经够了吧 就算你不小心误踩油门 15公尺应该也有时间 让你反应并且刹住 而且它的角度很广 那是跟你天线的设计有关系 但是至少可以到150—160以上 所以可以用这个雷达 也不是说一颗比一颗 当然是雷达比不上 超音波那么便宜 但是你一颗可以取代四颗 就很多人很有兴趣 而且雷达除了做倒车以外 它可能还可以做些额外的 像盲点侦测 都可以整合在同一根雷达上面 另外,一个最大的重点 就是它除了是low power之外 它还是low cost 这个cost 基本上是可以 可以匹敌到四五颗超音波 跟它大概一样的价钱, 这样子的一个等级 那这边有看到一个叫aop 叫做antenna on package 我们拜访了那么多颗 其实我们常遇到 客户最大的问题 第一个就是客户没有 设计天线的人才 这是第一点 第二点 就算他有设计天线的人才 他没有测试天线的仪器 因为77G,60G的频率太高频了 买那种高频的仪器 动则都是上千万 那就有可能受不了 第三个最难的就是 客户可能没有办法写一些演算法 没关系,TI都听到了,所以 我们就除了aop这个东西 所谓的aop呢 我们直接把天线做在 我们的package上面 所以这就很大程度解决客户的问题 客户自己不需要design天线 不用测试天线 他只要专心写他的演算法就好了 这个是我们把这几个 这是我们目前现有的产品 现有的我们已经raise6843 以及6843aop 这个aop我们准备在 明年的一月就会demo出来 其实各位现在在我们官网上 已经看到这个制出来了 只是你点进去还是空的 一样的,我们在6443 就是比较中阶的一样会有aop 这地方有提到这个神秘的cheap 一样会有个aop出来 那还有一个呢 就是awr1843 刚刚有提到 有个awr1843 那我们可能会出也可能不会出 因为这一颗是77G的 我们要看客户的需求 才会决定去说会不会把 这颗正式的relate出来 其实要relate出来也很简单 只要把awr改一改就行 awr1843的测试过程 可能还比iwr严谨 因为所有的车用的 温度都是-40—120℃ 工业用主-40—105而已 不用再过车规认证 我们很快就可以拿来易于二次的 主要是因为它还是77G的 我们现在看起来77G的 市场在工业上并不是很吃香 所这个是看状况 我们来讲一下aop 这个就是我们aop的trip 这个是77G的(听不清) 这边各位可能看不到 这边有四个solo天线跟 三个follow天线在这个地方 强调一下,这是77G的(听不清) 不是60G的 60G的天线会长这个样子 这边三个follow天线 四个solo天线 所以它的天线的virtual antenna的 场形会长成这个样子 aop到底会带给客户什么好处呢 很明显的就是第一个 你的PCB的design会变得简单 因为我们现在的,各位看到刚刚那个 板子 我们现在是antenna on PCB对吧 我们也不能随便乱做 PCB的材料是(听不清)什么东西 那个其实还蛮贵的 可是如果你用aop的话 你用很简单的材料 去做你的PCB都行 所以这会省掉很大... 我们自己内部评估过 大概可以省六元钱 第二个 你的那个开发时长, 所以更不用设计天线 你不用测天线 至少可以赚到. 3—6个月的开发时长 第二点,你aop做上去之后 其实你可以做很小的trip 因为天线都已经长到package上面 可以注入很小的model 这边有看到,百分之 系数small learning on 24MHz 40%比aop的还要小 另外还有个好处就是说 因为它直接aop了 所以它之间的接线 是距离是很短的 所以几乎没有所谓的 conduction的nose 它的(听不清)反而比你天线做在 PCB板上还要高 意思就是,比你自己 做天线延伸的更远 当然,以同样的天线 patent比较是这个样子 但是天线自己设计的话, 你可以根据不同的应用 去做不同天线的设计 你要打得远的或者打得广的 那个就没有办法 那个就没办法用aop做出来 天线就固定在那边 客户如果有天线的需求 有自己design天线的需求, 那就要麻烦客户 用(听不清)aop的 他自己去设计天线 这个东西其实已经发布了 就刚才提到 我们在测试,就明年的一月九日 会demo simple的话在2Q,就可以拿到simple 这边有一个小小的图 就是一个case trip 你可以看出来,这个model那么小 这个大概是2.2 x 2.3公分 然后再aop这个 package大概是1.5 x 1.5公分 这个是aop的一些performers 你可以看的到 我们aop目前设计的是一个广角的 就是说它的fov 上下一百六十度,左右一百六十度 很广 它的侦测距离 各位在问侦测距离的时候 一定要知道一件事,就是 到底是侦测什么东西 因为侦测人、侦测车或侦测小狗 那个侦测距离是完全不一样 主要是因为result us, 就是result code section 换句话来说,就是反射的强度 所以以人来讲 它可以侦测到五十度正前方 如果左右六十度的话 在三十公尺 八十度的话是十五公尺 如果是车子的话 可以到几乎是两倍 我们里面还可以用一个技巧 就是类似像 been forming这样子的技巧 并不是真的been forming 因为目前还没有 资源这个been forming 我们叫做bpm, binary的phase modulation 利用那个技巧,大概还能增加30% 所以大概从五十提升到六十五 bpm可以增加一些snr 所以可以用你的距离进一步提升 基本上这样子的一个东西 已经符合工业用很多 基本可以(听不清)掉大部分场景 除非你是超长距离 比如说超过一百公尺 那个没办法 你可能要自己去设计天线 接下来讲我们这个 60G的evn 我们evn中 从60G出来之后 它改成这样一个形式 就是它是一个antenna board 加上一个carrier board 所以好处就是说 你的antenna board可以换 当然你有需要不同的antenna的时候 你就换成为antenna board就好了 然后carrierboard可以沿用 carrier board里面就放很多的接头 很多的一些界面 它的参数是这个样子 你可以看到这是我们 目前available的(听不清) 它这个是属于比较长距离的 所以可以看到它侦测距离在五十公尺 但是它的上下角度就比较 应该说它的这样子的 角度来说resolution比较好 上下的resolution就比较差 这个大概在年底就会出来一个,叫ods 这边有提到, overhead detection sensing 你可以看到它天线的长法 跟我的aop天线的长法 是一模一样的 所以它天线的场形是一个球形 代表是上下左右它都侦测 所以顾名思义,什么叫ods overhead,它是准备要 装在这个天花板上面 装载天花板往下侦测 因为往下侦测它就不分前后左右 将来我们也会有aop的一个 antenna board 它不是长这样子 它大概会长这个样子 就是一样是插在这个插槽上 我们来看一下carrier board 到底是在干什么 可以看到carrier board 里面有一大堆的界面 这边有一个xds100 的一个(听不清) 跟USB转UR 有人可能会问到 为什么它会有一个ftdi ftdi应该是在 ftdi是在这边 ftdi是为了来控制dca1000 像我们会有一个demo 就是接了dca去抓雷达的raw data 这个是ftdi 另外还有一堆, 这个60pin的collect 是拿来接antenna board 看到背面,背面还有这个叫做 launchpad connector 可以接TI的launchpad 我们看一下ecosystem 这是目前买得到的 将来会有一个ods的antenna board 如果你需要做poe 我刚才有提到 它后面有一个launchpad接头 可以拿来接一个430的launchpad 搭成poe的一个要求 因为我们刚才提过这个板子 有可能都是要放在天花板 所以供电,你不可能 另拉一条电源线 有可能直接用poe去供电 因为有可能要跟 你的surveillance接在一起 所以必须要有poe 这样的一个(听不清)在 这个是接dca1000 dca1000的capture card 接在这个地方 这边有另外一个USB转UR的 接头可以去控制它 之前我们如果要装 装那个raw data 我们还要买一块叫 dev(听不清)的东西 再接一个dca1000 其实还蛮啰嗦的 感觉又好像在学科无用的感觉 直接这样子接起来就行 我们讲的都是硬体,异变部分 其实我们发布的同时 就跟游戏机出来的时候 一定会搭配一大堆 游戏一样 我们的demo也都准备好了 这是area scanner 这个是用在6843 60G的 这个就是我们平常 侦测那个空间到底 哪边有人,哪边被占用 然后people counting也都在这个地方 people还要特别强调一下 就是我们在明年一月的时候 会把它移植到aop的板子上 而且还会去做随机的一个tracking 什么叫随机的tracking 它是准备放在天花板上 它可以侦测到人的身高 目前的demo纯粹就是平面的 你侦测到身高只是第一步而已 你会根据身高, 都会动物体的高度 来决定这个人的 可能是大人或小孩,或者是它跌倒 那这个在一些特殊的场合 就还蛮有用的 接下来就是,我们还有 一个叫做false detection 的mitigation 这东西是什么呢 向我们people counting 大家如果有看过我们demo就知道 它这种判别是不是一个人 为甚旁边的椅子不会 判断成这是一个人呢 因为它里面用了一个演算法 就是禁止太久的东西它就把它滤掉 可是室内有什么东西 会造成你误判呢 这边有一台电风扇 电风扇很可恶, 因为它一直在转 而且它会去吹其他地方 像它吹的叶子或者什么 就会造成很多的误判 可是我们有办法滤掉 为什么 因为讲到雷达会传回什么东西 速度、角度、距离 我们可以从速度去判断说 现在这东西动的合不合理 他速度太快了 它的转动速度太快了 这个东西大概不是人 我们可以把它滤掉 基本原理大概就是这个样子 还有gesture recognition 之前在1443有做过 就上下左右,可以 利用你的手势去操作
下面就由我来介绍industrial雷达的
make和update
其实各位很幸运
因为我们TI刚刚好在这个月月初
制了60GHz的雷达
各位在用雷达的时候,会想到
不管是老板还是自己
会想到的第一件事是什么
大部分都是说你们这个到底合不合法
会说你这个频段是OK的吗
用了会不会出问题
的确,regulation是一个很大的问题
大家也知道TI十年磨一剑
做了雷达
一开始是给车用客户的
因为77G的雷达
主要是用在车子
全世界,大概77G都通用
问题是你把车用雷达的 频段拿来做工业用
拿来做一般controller用
基本上是不太可以
世界上没有几个国家 是可以让你这么做的
所以呢,我们也知道这个问题
所以我们算是
且战且走
先推出工业用雷达
来focus一些可以用的市场
同时我们也慢慢的在做60G的雷达
终于,就在这个月初
我们把60G的雷达制作了
这边有一个60G雷达的一个开发板
最新的开发板
我传下去给各位看一下
可以看见它是一个两片式的组合
这个在台湾只有两片
就麻烦各位手下留情
对它温柔一点儿
这个其实在我们的网站上就有
有它的说明书跟用户手册
这个有得卖
这个待会儿会跟各位看一下
回到我刚刚的问题
第一件事大家就会问说
到底合不合法
我们来先看
全世界大概只有 日本用77G的雷达
用在车用以外是OK的
他们并没有限制
所以如果你的客户在日本
你可以选用TI的77G工业用雷达
没有问题
他们并没有这样的限制
如果在美国
美国就好玩了
美国,77G只允许装在所谓的
fluid level sensing
就是像油槽、化学槽、混凝土槽
你可以装那边
侦测那个液面的高度
而且他有规定,一定要往下打, 不可以往旁边打
他会怕你把电子波散进去
影响到其他的东西
因为美国有些绯安的设备
大概也是用这个频段
所以他规定是这个样子
至于其他的应用, 像people counting
或者是
工厂的avg啊, 那种自动设备,都不行
因为那个都有可能会往旁边打
会散进去,不行
在这种状况下,就只有60G
只有60G可以使用
我们在看其他的地方
欧洲,欧洲跟美国其实也差不多
但是欧洲
欧洲在77G的部分 有某些频段
是可以用的
现在我们讲77其实都是一个统称
所谓的77都是从76—81
67其实也是一个统称
60—64
各位要有这样的一个概念
在欧洲的话呢
某些77G可以
60是绝对没问题的
60是所谓的ism ben
就跟我们(听不清) 用的2.4G是一样的
那个是不需要去跟政府license
所以大家用的
所以你看到2.4G有WiFi
有蓝牙,还有一大堆 通通集成在2.4G
所以2.4G的信号很脏
常会有问题
所以才会,慢慢移到5G
偏偏5G传的距离又很短
将来比如说我们5G的行动网路
5G的行动网路,有些时候也会用到
二十几G的mmWave这个频段
所以各位可以知道
5G的基地台一定比现在4G要多很多
因为大家学过电视传播源知道嘛
频率越高,传的距离越短
虽然它的能量高
可是它的绕射跟
点射是比较不行的
那会想到
再请各位思考一个问题
为什么现在大家用24G
理论上说24G传的比60G或77G
还远
因为它的频率比较短
可是为什么
大家在网路上看到
如果是77G或60G
我们能够侦测的距离更长
所以我们想过这个问题
待会儿再跟各位讲为什么
我们接着往下看
China跟Korea
就是铁板硬块
77G完全不能用
这边台湾呢
台湾跟中国一样
其实一样的意思是说
我们没有规定到底可以用或不能用
没有明文规定
没有明文规定77G到底能用不能用
但是为了避免风险
将来东西卖出去了, 结果被人家说不合法
你要回收,这样就太划不来了
所以最安全的选择就是选60G
60G放纵四海皆准
都是OK的
当然我们先看一下
在TI 出60G之前
TI当然是有两个我们出了77G的sensor
刚刚就是有提到说我们的 (听不清)变化的一个准则
前面如果是a就是automotive
前面如果是i就是industrial
台湾跟中国一样,就是没有限制
就是没有明文规定可以或不可以
你看那个频谱
想那个ncc列出的一大张
什么频段谁用
但是在77G这个地方
他没有写
没有写清楚
所以你要用可以, 但是风险自负
TI原本就有77G 的solution
1443跟1642
再补充一下
1443跟1642, 前面这个是比较中阶的
因为它里面有dsp
我可以在里面做一些 比较高等的运算
当然,我们TI也不是
可以看一下, 基本上的应用就是这样子
1443可以看到所有的资料进来之后
经过这些处理
处理程序之后
它最多吐出来是什么
是point cloud
是点云
就是一个一个的点,侦测到多少点
每个点的距离、角度跟速度
它会给你
但是如果你要做一些 比较高等的侦测的话
比如说你要把好几个点
比如说一台车
一台车可能有五六个、 七八个甚至十几个反射点
它通通会报给你
在1443这样子的,通通报给你
你要是一判断说
到底它是不是同一个物体
那你要怎么判断呢
其实也很简单
如果这几个物体同时在移动
具有同时的位移、同样的 角度跟同样的速度
那这几个点大概就是同一个物体
没错吧
但是这个intelligent事实上是可以做在
做在我们的SOC里面的
你可以用dsp把它做clustering
甚至可以做tracking
最后呢,甚至你 还可以做classification
classification很多人很有兴趣
就是说你要侦测人还是狗
怎么办
你让我分得出来
因为像很多做(听不清)的厂商
他们常常会误判
常常人走过去,camera照是OK的
可是同时小猫小狗走过去
或者只是风吹草动
它的camera就打开开始照相
就是代表说, 它没有办法做classification
分类
雷达,如果你写 高端一点的演算法的话
你根据点云多广
甚至点云长的形状
你稍微可以辨识一下
是什么样的东西
这当然是需要很多的尝试了
不过至少,你如果用的dsp的话
这些东西都是有可能的
那6G可以看到
也不是说从无到有
其实我们是从77G的产品
把它延伸过来
之前的1642现在变成叫6843
之后会有一个1443, 最后会有一个6443
基本上里面的东西大致一样
大致一样
但是呢,6843多了比较多的东西
第一个,它原本只有 两个transmitter天线
它现在三个
变成三个之后呢
不管是在角度的solution
或者是在做其他的, 想那个增加snr
用(听不清)去做 snr的技巧都会变好
另外它的记忆体也增加了
这个记忆体的增加其实很关键
就是说它的记忆体增加事实上是增加
R4这个地方
实际上你的R4
之前你在dsp,在这个1642时代呢
dsp它要负责来做fft的运算
因为它里面没有fft的加速器
但是到了18的时候
抱歉
到了6843的时候
fft的加速器也整进来了
就代表说dsp原本拿来计算fft的
computing power 现在可以把它构出来
你的dsp可以做更高端的事情
那设置它加的记忆体在R4上面
R4也可以做一些尝试
抱歉
可以直接进行演算法
其实像我们people counting的话
之前都有看过people counting的demo
里面有用到一个盐酸伐叫G trick
G trick不是用在dsp上面的
G trick反而是用在R4上面的
我这样说事实上我也很讶异
事实上R4是有能力去 辅助dsp来R一些
比较高等的algorithm
可以看一下,这是它们的一些比较
你可以看到
6843,它的中频,已经提升到10MHz
RAM也增加了
多了一个fft的加速器
另外它的transmitter天下又多了一根
6443基本上没有什么大改变
就是原本的76—81
现在把它换成60—64
大概是这个样子
抱歉,它的记忆体也增加了一些
其实它的R4现在可以用一些 比较高等的一些演算法
那我再把这个(听不清)再整理一下
6843就是之前的1642的下一代
里面的(听不清)是这个样子
我们已经发布了
十一月初的时候就已经发布了
正式量产是在明年的四月
同样的,这一颗呢
它的6443一样
它是focus在比较短
刚刚忘了讲
大概是在100公尺附近的应用
50公尺附近的话,只需要用这个
它一样,它一样的量产的 时间是在明年的四月
这边还有一个
神秘的...
这个cheaper是我们目前在规划中的
它事实上就是一个
它是focus在show range
但是它主要的目的是拿来做 PI或(听不清)的replacement
我们有一个很大的 (听不清)想要把
超音波给干掉
各位车子都有倒车雷达,对吧
你的车子有几颗倒车雷达
少说会有两颗
有的比较高档还会有四颗
甚至六颗
前面还要加好几颗, 很丑的,还要挖洞
为什么呢
因为超音波的侦测距离很短
大概不到5公尺
而且它的角度很窄
它的角度很窄
所以为什么装那么多颗
超音波呢
因为它的角度很窄
必须装多一点,才能 侦测到各个角度
但是雷达没这个问题
雷达的侦测距离又长
15公尺已经够了吧
就算你不小心误踩油门
15公尺应该也有时间 让你反应并且刹住
而且它的角度很广
那是跟你天线的设计有关系
但是至少可以到150—160以上
所以可以用这个雷达
也不是说一颗比一颗
当然是雷达比不上 超音波那么便宜
但是你一颗可以取代四颗
就很多人很有兴趣
而且雷达除了做倒车以外
它可能还可以做些额外的
像盲点侦测
都可以整合在同一根雷达上面
另外,一个最大的重点 就是它除了是low power之外
它还是low cost
这个cost
基本上是可以
可以匹敌到四五颗超音波
跟它大概一样的价钱, 这样子的一个等级
那这边有看到一个叫aop
叫做antenna on package
我们拜访了那么多颗
其实我们常遇到
客户最大的问题
第一个就是客户没有 设计天线的人才
这是第一点
第二点
就算他有设计天线的人才
他没有测试天线的仪器
因为77G,60G的频率太高频了
买那种高频的仪器
动则都是上千万
那就有可能受不了
第三个最难的就是
客户可能没有办法写一些演算法
没关系,TI都听到了,所以
我们就除了aop这个东西
所谓的aop呢
我们直接把天线做在 我们的package上面
所以这就很大程度解决客户的问题
客户自己不需要design天线
不用测试天线
他只要专心写他的演算法就好了
这个是我们把这几个
这是我们目前现有的产品
现有的我们已经raise6843
以及6843aop
这个aop我们准备在 明年的一月就会demo出来
其实各位现在在我们官网上
已经看到这个制出来了
只是你点进去还是空的
一样的,我们在6443
就是比较中阶的一样会有aop
这地方有提到这个神秘的cheap
一样会有个aop出来
那还有一个呢
就是awr1843
刚刚有提到
有个awr1843
那我们可能会出也可能不会出
因为这一颗是77G的
我们要看客户的需求
才会决定去说会不会把 这颗正式的relate出来
其实要relate出来也很简单
只要把awr改一改就行
awr1843的测试过程
可能还比iwr严谨
因为所有的车用的
温度都是-40—120℃
工业用主-40—105而已
不用再过车规认证
我们很快就可以拿来易于二次的
主要是因为它还是77G的
我们现在看起来77G的 市场在工业上并不是很吃香
所这个是看状况
我们来讲一下aop
这个就是我们aop的trip
这个是77G的(听不清)
这边各位可能看不到
这边有四个solo天线跟 三个follow天线在这个地方
强调一下,这是77G的(听不清)
不是60G的
60G的天线会长这个样子
这边三个follow天线
四个solo天线
所以它的天线的virtual antenna的 场形会长成这个样子
aop到底会带给客户什么好处呢
很明显的就是第一个
你的PCB的design会变得简单
因为我们现在的,各位看到刚刚那个
板子
我们现在是antenna on PCB对吧
我们也不能随便乱做
PCB的材料是(听不清)什么东西
那个其实还蛮贵的
可是如果你用aop的话
你用很简单的材料
去做你的PCB都行
所以这会省掉很大...
我们自己内部评估过
大概可以省六元钱
第二个
你的那个开发时长, 所以更不用设计天线
你不用测天线
至少可以赚到. 3—6个月的开发时长
第二点,你aop做上去之后
其实你可以做很小的trip
因为天线都已经长到package上面
可以注入很小的model
这边有看到,百分之 系数small learning on 24MHz
40%比aop的还要小
另外还有个好处就是说
因为它直接aop了
所以它之间的接线 是距离是很短的
所以几乎没有所谓的 conduction的nose
它的(听不清)反而比你天线做在
PCB板上还要高
意思就是,比你自己 做天线延伸的更远
当然,以同样的天线 patent比较是这个样子
但是天线自己设计的话, 你可以根据不同的应用
去做不同天线的设计
你要打得远的或者打得广的
那个就没有办法
那个就没办法用aop做出来
天线就固定在那边
客户如果有天线的需求
有自己design天线的需求, 那就要麻烦客户
用(听不清)aop的
他自己去设计天线
这个东西其实已经发布了
就刚才提到
我们在测试,就明年的一月九日
会demo
simple的话在2Q,就可以拿到simple
这边有一个小小的图
就是一个case trip
你可以看出来,这个model那么小
这个大概是2.2 x 2.3公分
然后再aop这个 package大概是1.5 x 1.5公分
这个是aop的一些performers
你可以看的到
我们aop目前设计的是一个广角的
就是说它的fov
上下一百六十度,左右一百六十度
很广
它的侦测距离
各位在问侦测距离的时候
一定要知道一件事,就是 到底是侦测什么东西
因为侦测人、侦测车或侦测小狗
那个侦测距离是完全不一样
主要是因为result us, 就是result code section
换句话来说,就是反射的强度
所以以人来讲
它可以侦测到五十度正前方
如果左右六十度的话
在三十公尺
八十度的话是十五公尺
如果是车子的话
可以到几乎是两倍
我们里面还可以用一个技巧
就是类似像 been forming这样子的技巧
并不是真的been forming
因为目前还没有 资源这个been forming
我们叫做bpm, binary的phase modulation
利用那个技巧,大概还能增加30%
所以大概从五十提升到六十五
bpm可以增加一些snr
所以可以用你的距离进一步提升
基本上这样子的一个东西
已经符合工业用很多
基本可以(听不清)掉大部分场景
除非你是超长距离
比如说超过一百公尺
那个没办法
你可能要自己去设计天线
接下来讲我们这个
60G的evn
我们evn中
从60G出来之后
它改成这样一个形式
就是它是一个antenna board 加上一个carrier board
所以好处就是说
你的antenna board可以换
当然你有需要不同的antenna的时候
你就换成为antenna board就好了
然后carrierboard可以沿用
carrier board里面就放很多的接头
很多的一些界面
它的参数是这个样子
你可以看到这是我们 目前available的(听不清)
它这个是属于比较长距离的
所以可以看到它侦测距离在五十公尺
但是它的上下角度就比较
应该说它的这样子的 角度来说resolution比较好
上下的resolution就比较差
这个大概在年底就会出来一个,叫ods
这边有提到, overhead detection sensing
你可以看到它天线的长法 跟我的aop天线的长法
是一模一样的
所以它天线的场形是一个球形
代表是上下左右它都侦测
所以顾名思义,什么叫ods
overhead,它是准备要 装在这个天花板上面
装载天花板往下侦测
因为往下侦测它就不分前后左右
将来我们也会有aop的一个
antenna board
它不是长这样子
它大概会长这个样子
就是一样是插在这个插槽上
我们来看一下carrier board 到底是在干什么
可以看到carrier board 里面有一大堆的界面
这边有一个xds100 的一个(听不清)
跟USB转UR
有人可能会问到 为什么它会有一个ftdi
ftdi应该是在
ftdi是在这边
ftdi是为了来控制dca1000
像我们会有一个demo
就是接了dca去抓雷达的raw data
这个是ftdi
另外还有一堆, 这个60pin的collect
是拿来接antenna board
看到背面,背面还有这个叫做
launchpad connector
可以接TI的launchpad
我们看一下ecosystem
这是目前买得到的
将来会有一个ods的antenna board
如果你需要做poe
我刚才有提到
它后面有一个launchpad接头
可以拿来接一个430的launchpad
搭成poe的一个要求
因为我们刚才提过这个板子
有可能都是要放在天花板
所以供电,你不可能 另拉一条电源线
有可能直接用poe去供电
因为有可能要跟 你的surveillance接在一起
所以必须要有poe 这样的一个(听不清)在
这个是接dca1000
dca1000的capture card
接在这个地方
这边有另外一个USB转UR的
接头可以去控制它
之前我们如果要装
装那个raw data
我们还要买一块叫 dev(听不清)的东西
再接一个dca1000
其实还蛮啰嗦的
感觉又好像在学科无用的感觉
直接这样子接起来就行
我们讲的都是硬体,异变部分
其实我们发布的同时
就跟游戏机出来的时候 一定会搭配一大堆
游戏一样
我们的demo也都准备好了
这是area scanner
这个是用在6843 60G的
这个就是我们平常 侦测那个空间到底
哪边有人,哪边被占用
然后people counting也都在这个地方
people还要特别强调一下
就是我们在明年一月的时候
会把它移植到aop的板子上
而且还会去做随机的一个tracking
什么叫随机的tracking
它是准备放在天花板上
它可以侦测到人的身高
目前的demo纯粹就是平面的
你侦测到身高只是第一步而已
你会根据身高, 都会动物体的高度
来决定这个人的
可能是大人或小孩,或者是它跌倒
那这个在一些特殊的场合
就还蛮有用的
接下来就是,我们还有 一个叫做false detection
的mitigation
这东西是什么呢
向我们people counting
大家如果有看过我们demo就知道
它这种判别是不是一个人
为甚旁边的椅子不会 判断成这是一个人呢
因为它里面用了一个演算法
就是禁止太久的东西它就把它滤掉
可是室内有什么东西
会造成你误判呢
这边有一台电风扇
电风扇很可恶, 因为它一直在转
而且它会去吹其他地方
像它吹的叶子或者什么
就会造成很多的误判
可是我们有办法滤掉
为什么
因为讲到雷达会传回什么东西
速度、角度、距离
我们可以从速度去判断说
现在这东西动的合不合理
他速度太快了
它的转动速度太快了
这个东西大概不是人
我们可以把它滤掉
基本原理大概就是这个样子
还有gesture recognition
之前在1443有做过
就上下左右,可以 利用你的手势去操作
手机看
扫码用手机观看
 视频简介
视频简介
60GHz mmWave传感器
所属课程:汽车/工业 毫米波雷达感测器
发布时间:2018.12.03
视频集数:6
本节视频时长:00:30:23
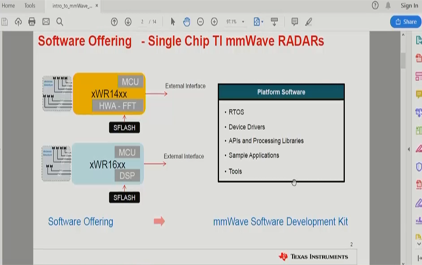
本课程介绍了TI mmWave解决方案;60GHz mmWave传感器;60GHz vs. 24GHz;mm波伏电源解决方案和BOM估算;mmWave SDK 。


 未学习 TI mmWave解决方案
未学习 TI mmWave解决方案
 未学习 60GHz mmWave传感器
未学习 60GHz mmWave传感器
 未学习 60GHz vs. 24GHz
未学习 60GHz vs. 24GHz
 未学习 mm波伏电源解决方案和BOM估算
未学习 mm波伏电源解决方案和BOM估算
 未学习 mmWave SDK
未学习 mmWave SDK
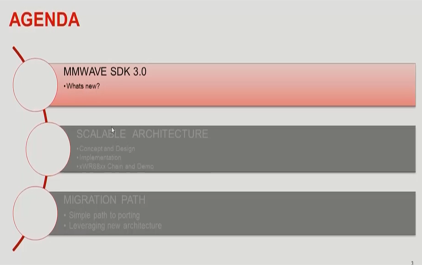 未学习 mmWave SDK简介
未学习 mmWave SDK简介






