定频降压型变换器的控制策略(下)
Loading the player...
将在30s后自动为您播放下一课程
定频的 DC/DC BUCK 控制方式主要的分为以下几种 电压模式、数字模式和电流模式 那么接下来我们会重点介绍电压模式、电流模式 图上显示的是定频电压模式 DC BUCK 主要的框图 主要有三部分组成,第一个是功率回路 第二个是补偿回路和PWM比较器 功率回路的上下管交替导通 产生一个带占空比的方波 功率脉冲通过LC组成的低通滤波器之后 输出一个稳定的直流 那么输出电流和输出电压的关系是输出电压乘以duty cycle 通常电压模式,我们需要三型网络才能够 对整个控制器进行比较好的补偿 构成一个稳定的环路和得到比较好的动态指标 在图上我们可以看到输出电压通过一个分压网络 得到反馈的电压信号 电压信号输入到误差放大器 误差放大器根据反馈信号得到一个输出的误差信号 那么这个误差跟随信号和锯齿波做一个比较 产生带占空比调制的驱动波形 驱动波形送到功率级驱动上下管交替导通 构成一个稳定的闭环 图上显示的是功率回路的传递函数和波特图 我们可以看到主功率回路由输出电感和电容构成 构成了 LC 双极点和 ESR 对应的零点 图上显示的是 PWM 比较器的工作过程 我们可以看到误差放大器输出的误差电压跟随信号 和固定的斜锯齿波三角波比较 那么在误差电压信号发生变化的时候 相应的占空比会跟随误差电压的变化 输出不同的脉宽 那么带占空比的启动信号输入到功率级推动上下管 就会产生带占空比的功率脉冲调节输出端的 DC 电压 脉宽调制器的增益就等于 VIN 输入电压除以斜三角波的峰值 VRamp 在电压模式下,随着输入电压的变化 脉宽调制器的增益是在变的 对应于不同的输入电压或者是宽范围输入电压 那么这个增益的变化带来环路补偿上的问题是非常麻烦的 对应输入电压的变化通常我们通常会引入前馈 前馈的作用使得斜三角波的 VRamp 电压 跟随输入电压的变化而变化 从图上我们可以看到 如果说 VRamp 跟随输入电压 以一个固定的比例在变化,那么在整个的增益环节里面 就可以把 VIN 这个因素抵消掉 从图上的波形我们可以看到 在输入电压变化的时候 对应的 RAMP 的峰值也在做相应的调整 那么就可以把输入电压对环路的影响从原理上消除掉 图上显示的是 一个 DCDC BUCK 在负载做 1A 跳变时候 对应的输出电压的过冲 图上我们看到在补偿网络没有进行优化 或者说进行校正的时候 整个的特性都是非常的糟糕,有非常多的振荡 过程 △V 幅值也会偏高 那么我们进行补偿或者说进行环路校正的目的 就是在整个负载范围内得到一个稳定的输出 动态负载会有一个非常好的输出波形 比较小 的△V 和恢复时间 补偿回路通常为三种 一型是单极点,二型是两个极点和一个零点 三型是三个极点和两个零点 电压模式控制方式通常需要三型补偿网络 才能够对整个回路进行比较好的补偿 得到足够的相位裕量和幅值裕量 在波特图上我们可以看到有两个零点、三个极点 在图上可以看到我们把主功率回路的波特图 和补偿网络的波特图合起来就可以得到最终的 整个环路和稳定的 DC BUCK 的一个波特图 那么通常我们会放置两个零点抵消双极点 或使整个的最终的那个波特图 以-20dB 的斜率穿越零点 那么这个时候对应的 这个时候对应的幅值裕量和相位裕量都是足够的 通常这个穿越频率取开关频率的的十分之一 最多会取到开关频率的四分之一 环路补偿会影响到我们的动态指标和稳定性 在对误差网络进行比较好的补偿之后 动态负载的测试里面就可以看到 整个的 Recovery Time,恢复时间 和对应的过充都可以控制的非常好 那么我们的穿越频率 fc 就和恢复时间直接相关 过充 △V 可以根据我们对应的整个回路的输出阻抗 和 △I 负载跳变的数值来进行简单的计算 表格里面列的是电压模式控制的优点和缺点 那么电压模式多个 DC BUCK 之间更加容易同步 电压调整率与输出负载或者输入电流无关 相应的负载调整也会比较好 对于噪声对于 noise 不太敏感 相应的一些缺点有 需要高增益的高带宽的误差放大器 补偿网络的元器件数目比较多 补偿回路的调节会比较麻烦 输出电感对应的降额会影响到整个补偿回路的特性 那么在多相并联的时候 需要额外的电流环路来进行均流 图上显示的是以 TPS40170 为例的一个的 DC BUCK 输入从10V到60V,输出是5V 输出电流从0A到6A 预设的开关频率是频率是300k 首先我们要校验最小导通时间是否符合要求 那么在进行类似的设计的时候 只要在 TI 的网站上 WEBENCH 里面输入 你所需要的参数输入输出电流 那么WEBENCH会根据所需要的输入输出规格 计算出所需要的电感电容的值 给出相应的原理图 环路补偿的参数,包括最终的原理图和 BOM 以及一些相关的指标 波特图,相频裕量和幅值裕量 和效率曲线的一些 图上显示的是以 TPS40170 EVM 板为例 在 WEBENCH 上进行计算设计 然后根据实际的参数做对比测试 那么我们可以看到整个的 测试结果和计算结果是非常吻合的 这个是电压模式的 TPS40170 的对应的原理图 那么输入 HPA578 可以在 TI 网站上搜到相关的文档 有详细的原理图 BOM 以及测试结果 电流模式和电压模式的最大区别就是在电压模式当中 从输入电压引入前馈得到一个斜锯齿波 和误差放大器的输出电压进行比较 产生占空比 那么在电流模式呢 我们从电感电流引入电流信号 和误差放大器的输出电压进行比较 产生带占空比的波形 这样就引入了一个电流内环和电压外环 电流模式有峰值电流模式和平均值电流模式 那么现在在 DC BUCK 的应用里面 峰值电流模式的应用会更多一些 在峰值电流模式下 那么电感电流在一个小信号模型 或者在用比较短的时间内可以看作是恒定的 或者说把电感作为一个恒流源来处理 电感电流的检测通常有 DCR Sensing 的模式 这种模式在低压大电流的输出场合应用会比较多 也有在电感后面串小电阻来检测电感电流 或者是在上管检测MOS管上的信号来检测电感电流的 那么在电流模式情况下 占空比如果超过50% 需要对电感电流进行谐波补偿 防止发生次谐波震荡 图上我们可以看到电压模式和电流模式的对比 那么在电压模式的情况下 我们的主功率回路是由输出电感输出电容构成 波特图对应的有一个LC双极点 相频图在转频率点会有180度的相移 那么在电流模式 这个时候电感电流我们可以看做是恒定的 把电感作为一个恒流源来处理 这个时候呢LC双极点就会变为一个单极点 对应的相移也会减小到90度 在电流模式下我们可以看到主功率回路 就变成了一个单极点系统 那么相应的补偿网络我们可以用二型的补偿网络 就可以得到一个稳定的闭环系统 电流回路的补偿相对电压模式来说 会简单一些,元器件数目会少一些 表格里面显示的是电流模式的优点和缺点 电流模式呢因为把电感电流作为一个恒流源来处理 那么相应地我们可以采用二型的补偿网络 就可以得到一个稳定的闭环系统 内环电流环可以提高整个系统的动态响应特性 更容易实现 cycle-by-cycle 的限流模式 对于多个模块的均流相对于电压模式更容易实现一些 那么电流模式有一些缺点或者说是劣势 需要对占空比超过50%的工作模式进行斜率补偿 斜率校正防止发生次谐波振荡 对于 noise 或者对于噪声非常的敏感 因为对于噪声或者说对于开关带来的 spike 就会导致最小导通时间比较长 拟合电流模式控制方式 那么拟合电流控制方式电流的取样是从 下管续流管来取样电流 电流信号并不是真实的电感电流 而是通过采样保持器来生成的 或者说重新构建的电感电流波形 那么这个电流波形和实际的电感电流波形 是同步的或者是一致的 在峰值电流模式控制的时候呢 我们通常需要加 RC 的滤波器 对电流采样波形进行噪声滤除 或者是采用 blanking time 对前沿进行消隐 以避免噪声对整个控制回路造成干扰 或者是引起控制回路误动作 那么在拟合电流模式对于重新构建或重新拟合出来的电流 是没有这个噪声的 可以减小或者说避免这个滤波所带来的延时 降低 minimum on-time 的时间 图上显示的是拟合电流模式的原理框图 根据电路的电感值和电流检测电阻 Rs 的值 我们可以选择合适的电容 Cramp 确保我们的峰值和电感电流是一致的 或者说构建出来的电流信号和电感电流是同步的 拟合一致的 保证我们的电流控制模式是正常和稳定的 拟合电流模式在保留了 电流模式的所有的优点的前提下 那么额外地可以减小 minimum on-time 时间 去除了开关噪声 开关的 Spike 会对控制回路造成的干扰 避免了电流模式对噪声敏感的一个问题 图上是拟合电流控制模式 LM5116 的一个设计示范 输入是从7V到60V,输出电压5V,最大电流7A 设定工作频率是250kHz 从计算结果看 minimum on-time 是符合我们的设计要求的 那么对应在实际设计的时候 我们可以在 WEBENCH 上 输入相应的指标 输入输入电压、输出电压、输出电流和预期的温升 WEBENCH 会自动地仿真和计算给出一个原理图,BOM 包括一些指标特性、效率曲线 图上显示的是 LM5116EVM 板的实际测试波形和一些指标 我们可以看到这个指标和仿真出来的结果是非常吻合的 动态指标也非常的好 图上是根据 WEBENCH 仿真结果 最终得到的原理图输出 对应的原理图和EVM板 在 TI 的网站上都可以搜索的到 都可以下载相应的测试文档、原理图、BOM 定频的DCDC的控制方式 主要是有电压模式、电流模式和数字控制的方式 大家根据产品的实际需求 根据产品的指标以后 选择不同的控制模式 对应不同的控制方式和具体的产品型号 那么在这个设计里面 WEBENCH 是一个非常好的工具 可以快速的筛选出你所需要的控制器 给出需要的原理图 包括一些前期的仿真的的指标、效率、温升 和一些补偿回路的参数以及波特图
定频的 DC/DC BUCK 控制方式主要的分为以下几种 电压模式、数字模式和电流模式 那么接下来我们会重点介绍电压模式、电流模式 图上显示的是定频电压模式 DC BUCK 主要的框图 主要有三部分组成,第一个是功率回路 第二个是补偿回路和PWM比较器 功率回路的上下管交替导通 产生一个带占空比的方波 功率脉冲通过LC组成的低通滤波器之后 输出一个稳定的直流 那么输出电流和输出电压的关系是输出电压乘以duty cycle 通常电压模式,我们需要三型网络才能够 对整个控制器进行比较好的补偿 构成一个稳定的环路和得到比较好的动态指标 在图上我们可以看到输出电压通过一个分压网络 得到反馈的电压信号 电压信号输入到误差放大器 误差放大器根据反馈信号得到一个输出的误差信号 那么这个误差跟随信号和锯齿波做一个比较 产生带占空比调制的驱动波形 驱动波形送到功率级驱动上下管交替导通 构成一个稳定的闭环 图上显示的是功率回路的传递函数和波特图 我们可以看到主功率回路由输出电感和电容构成 构成了 LC 双极点和 ESR 对应的零点 图上显示的是 PWM 比较器的工作过程 我们可以看到误差放大器输出的误差电压跟随信号 和固定的斜锯齿波三角波比较 那么在误差电压信号发生变化的时候 相应的占空比会跟随误差电压的变化 输出不同的脉宽 那么带占空比的启动信号输入到功率级推动上下管 就会产生带占空比的功率脉冲调节输出端的 DC 电压 脉宽调制器的增益就等于 VIN 输入电压除以斜三角波的峰值 VRamp 在电压模式下,随着输入电压的变化 脉宽调制器的增益是在变的 对应于不同的输入电压或者是宽范围输入电压 那么这个增益的变化带来环路补偿上的问题是非常麻烦的 对应输入电压的变化通常我们通常会引入前馈 前馈的作用使得斜三角波的 VRamp 电压 跟随输入电压的变化而变化 从图上我们可以看到 如果说 VRamp 跟随输入电压 以一个固定的比例在变化,那么在整个的增益环节里面 就可以把 VIN 这个因素抵消掉 从图上的波形我们可以看到 在输入电压变化的时候 对应的 RAMP 的峰值也在做相应的调整 那么就可以把输入电压对环路的影响从原理上消除掉 图上显示的是 一个 DCDC BUCK 在负载做 1A 跳变时候 对应的输出电压的过冲 图上我们看到在补偿网络没有进行优化 或者说进行校正的时候 整个的特性都是非常的糟糕,有非常多的振荡 过程 △V 幅值也会偏高 那么我们进行补偿或者说进行环路校正的目的 就是在整个负载范围内得到一个稳定的输出 动态负载会有一个非常好的输出波形 比较小 的△V 和恢复时间 补偿回路通常为三种 一型是单极点,二型是两个极点和一个零点 三型是三个极点和两个零点 电压模式控制方式通常需要三型补偿网络 才能够对整个回路进行比较好的补偿 得到足够的相位裕量和幅值裕量 在波特图上我们可以看到有两个零点、三个极点 在图上可以看到我们把主功率回路的波特图 和补偿网络的波特图合起来就可以得到最终的 整个环路和稳定的 DC BUCK 的一个波特图 那么通常我们会放置两个零点抵消双极点 或使整个的最终的那个波特图 以-20dB 的斜率穿越零点 那么这个时候对应的 这个时候对应的幅值裕量和相位裕量都是足够的 通常这个穿越频率取开关频率的的十分之一 最多会取到开关频率的四分之一 环路补偿会影响到我们的动态指标和稳定性 在对误差网络进行比较好的补偿之后 动态负载的测试里面就可以看到 整个的 Recovery Time,恢复时间 和对应的过充都可以控制的非常好 那么我们的穿越频率 fc 就和恢复时间直接相关 过充 △V 可以根据我们对应的整个回路的输出阻抗 和 △I 负载跳变的数值来进行简单的计算 表格里面列的是电压模式控制的优点和缺点 那么电压模式多个 DC BUCK 之间更加容易同步 电压调整率与输出负载或者输入电流无关 相应的负载调整也会比较好 对于噪声对于 noise 不太敏感 相应的一些缺点有 需要高增益的高带宽的误差放大器 补偿网络的元器件数目比较多 补偿回路的调节会比较麻烦 输出电感对应的降额会影响到整个补偿回路的特性 那么在多相并联的时候 需要额外的电流环路来进行均流 图上显示的是以 TPS40170 为例的一个的 DC BUCK 输入从10V到60V,输出是5V 输出电流从0A到6A 预设的开关频率是频率是300k 首先我们要校验最小导通时间是否符合要求 那么在进行类似的设计的时候 只要在 TI 的网站上 WEBENCH 里面输入 你所需要的参数输入输出电流 那么WEBENCH会根据所需要的输入输出规格 计算出所需要的电感电容的值 给出相应的原理图 环路补偿的参数,包括最终的原理图和 BOM 以及一些相关的指标 波特图,相频裕量和幅值裕量 和效率曲线的一些 图上显示的是以 TPS40170 EVM 板为例 在 WEBENCH 上进行计算设计 然后根据实际的参数做对比测试 那么我们可以看到整个的 测试结果和计算结果是非常吻合的 这个是电压模式的 TPS40170 的对应的原理图 那么输入 HPA578 可以在 TI 网站上搜到相关的文档 有详细的原理图 BOM 以及测试结果 电流模式和电压模式的最大区别就是在电压模式当中 从输入电压引入前馈得到一个斜锯齿波 和误差放大器的输出电压进行比较 产生占空比 那么在电流模式呢 我们从电感电流引入电流信号 和误差放大器的输出电压进行比较 产生带占空比的波形 这样就引入了一个电流内环和电压外环 电流模式有峰值电流模式和平均值电流模式 那么现在在 DC BUCK 的应用里面 峰值电流模式的应用会更多一些 在峰值电流模式下 那么电感电流在一个小信号模型 或者在用比较短的时间内可以看作是恒定的 或者说把电感作为一个恒流源来处理 电感电流的检测通常有 DCR Sensing 的模式 这种模式在低压大电流的输出场合应用会比较多 也有在电感后面串小电阻来检测电感电流 或者是在上管检测MOS管上的信号来检测电感电流的 那么在电流模式情况下 占空比如果超过50% 需要对电感电流进行谐波补偿 防止发生次谐波震荡 图上我们可以看到电压模式和电流模式的对比 那么在电压模式的情况下 我们的主功率回路是由输出电感输出电容构成 波特图对应的有一个LC双极点 相频图在转频率点会有180度的相移 那么在电流模式 这个时候电感电流我们可以看做是恒定的 把电感作为一个恒流源来处理 这个时候呢LC双极点就会变为一个单极点 对应的相移也会减小到90度 在电流模式下我们可以看到主功率回路 就变成了一个单极点系统 那么相应的补偿网络我们可以用二型的补偿网络 就可以得到一个稳定的闭环系统 电流回路的补偿相对电压模式来说 会简单一些,元器件数目会少一些 表格里面显示的是电流模式的优点和缺点 电流模式呢因为把电感电流作为一个恒流源来处理 那么相应地我们可以采用二型的补偿网络 就可以得到一个稳定的闭环系统 内环电流环可以提高整个系统的动态响应特性 更容易实现 cycle-by-cycle 的限流模式 对于多个模块的均流相对于电压模式更容易实现一些 那么电流模式有一些缺点或者说是劣势 需要对占空比超过50%的工作模式进行斜率补偿 斜率校正防止发生次谐波振荡 对于 noise 或者对于噪声非常的敏感 因为对于噪声或者说对于开关带来的 spike 就会导致最小导通时间比较长 拟合电流模式控制方式 那么拟合电流控制方式电流的取样是从 下管续流管来取样电流 电流信号并不是真实的电感电流 而是通过采样保持器来生成的 或者说重新构建的电感电流波形 那么这个电流波形和实际的电感电流波形 是同步的或者是一致的 在峰值电流模式控制的时候呢 我们通常需要加 RC 的滤波器 对电流采样波形进行噪声滤除 或者是采用 blanking time 对前沿进行消隐 以避免噪声对整个控制回路造成干扰 或者是引起控制回路误动作 那么在拟合电流模式对于重新构建或重新拟合出来的电流 是没有这个噪声的 可以减小或者说避免这个滤波所带来的延时 降低 minimum on-time 的时间 图上显示的是拟合电流模式的原理框图 根据电路的电感值和电流检测电阻 Rs 的值 我们可以选择合适的电容 Cramp 确保我们的峰值和电感电流是一致的 或者说构建出来的电流信号和电感电流是同步的 拟合一致的 保证我们的电流控制模式是正常和稳定的 拟合电流模式在保留了 电流模式的所有的优点的前提下 那么额外地可以减小 minimum on-time 时间 去除了开关噪声 开关的 Spike 会对控制回路造成的干扰 避免了电流模式对噪声敏感的一个问题 图上是拟合电流控制模式 LM5116 的一个设计示范 输入是从7V到60V,输出电压5V,最大电流7A 设定工作频率是250kHz 从计算结果看 minimum on-time 是符合我们的设计要求的 那么对应在实际设计的时候 我们可以在 WEBENCH 上 输入相应的指标 输入输入电压、输出电压、输出电流和预期的温升 WEBENCH 会自动地仿真和计算给出一个原理图,BOM 包括一些指标特性、效率曲线 图上显示的是 LM5116EVM 板的实际测试波形和一些指标 我们可以看到这个指标和仿真出来的结果是非常吻合的 动态指标也非常的好 图上是根据 WEBENCH 仿真结果 最终得到的原理图输出 对应的原理图和EVM板 在 TI 的网站上都可以搜索的到 都可以下载相应的测试文档、原理图、BOM 定频的DCDC的控制方式 主要是有电压模式、电流模式和数字控制的方式 大家根据产品的实际需求 根据产品的指标以后 选择不同的控制模式 对应不同的控制方式和具体的产品型号 那么在这个设计里面 WEBENCH 是一个非常好的工具 可以快速的筛选出你所需要的控制器 给出需要的原理图 包括一些前期的仿真的的指标、效率、温升 和一些补偿回路的参数以及波特图
定频的 DC/DC BUCK 控制方式主要的分为以下几种
电压模式、数字模式和电流模式
那么接下来我们会重点介绍电压模式、电流模式
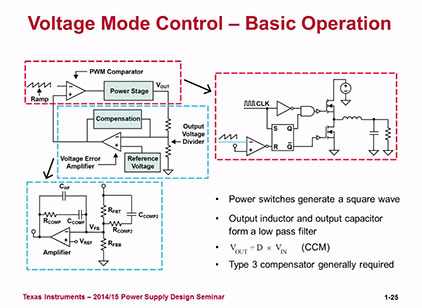
图上显示的是定频电压模式 DC BUCK 主要的框图
主要有三部分组成,第一个是功率回路
第二个是补偿回路和PWM比较器
功率回路的上下管交替导通 产生一个带占空比的方波
功率脉冲通过LC组成的低通滤波器之后
输出一个稳定的直流
那么输出电流和输出电压的关系是输出电压乘以duty cycle
通常电压模式,我们需要三型网络才能够
对整个控制器进行比较好的补偿
构成一个稳定的环路和得到比较好的动态指标
在图上我们可以看到输出电压通过一个分压网络
得到反馈的电压信号
电压信号输入到误差放大器
误差放大器根据反馈信号得到一个输出的误差信号
那么这个误差跟随信号和锯齿波做一个比较
产生带占空比调制的驱动波形
驱动波形送到功率级驱动上下管交替导通
构成一个稳定的闭环
图上显示的是功率回路的传递函数和波特图
我们可以看到主功率回路由输出电感和电容构成
构成了 LC 双极点和 ESR 对应的零点
图上显示的是 PWM 比较器的工作过程
我们可以看到误差放大器输出的误差电压跟随信号
和固定的斜锯齿波三角波比较
那么在误差电压信号发生变化的时候
相应的占空比会跟随误差电压的变化
输出不同的脉宽
那么带占空比的启动信号输入到功率级推动上下管
就会产生带占空比的功率脉冲调节输出端的 DC 电压
脉宽调制器的增益就等于
VIN 输入电压除以斜三角波的峰值 VRamp
在电压模式下,随着输入电压的变化
脉宽调制器的增益是在变的
对应于不同的输入电压或者是宽范围输入电压
那么这个增益的变化带来环路补偿上的问题是非常麻烦的
对应输入电压的变化通常我们通常会引入前馈
前馈的作用使得斜三角波的 VRamp 电压
跟随输入电压的变化而变化
从图上我们可以看到
如果说 VRamp 跟随输入电压
以一个固定的比例在变化,那么在整个的增益环节里面
就可以把 VIN 这个因素抵消掉
从图上的波形我们可以看到
在输入电压变化的时候
对应的 RAMP 的峰值也在做相应的调整
那么就可以把输入电压对环路的影响从原理上消除掉
图上显示的是
一个 DCDC BUCK 在负载做 1A 跳变时候
对应的输出电压的过冲
图上我们看到在补偿网络没有进行优化
或者说进行校正的时候
整个的特性都是非常的糟糕,有非常多的振荡
过程 △V 幅值也会偏高
那么我们进行补偿或者说进行环路校正的目的
就是在整个负载范围内得到一个稳定的输出
动态负载会有一个非常好的输出波形
比较小 的△V 和恢复时间
补偿回路通常为三种
一型是单极点,二型是两个极点和一个零点
三型是三个极点和两个零点
电压模式控制方式通常需要三型补偿网络
才能够对整个回路进行比较好的补偿
得到足够的相位裕量和幅值裕量
在波特图上我们可以看到有两个零点、三个极点
在图上可以看到我们把主功率回路的波特图
和补偿网络的波特图合起来就可以得到最终的
整个环路和稳定的 DC BUCK 的一个波特图
那么通常我们会放置两个零点抵消双极点
或使整个的最终的那个波特图
以-20dB 的斜率穿越零点
那么这个时候对应的
这个时候对应的幅值裕量和相位裕量都是足够的
通常这个穿越频率取开关频率的的十分之一
最多会取到开关频率的四分之一
环路补偿会影响到我们的动态指标和稳定性
在对误差网络进行比较好的补偿之后
动态负载的测试里面就可以看到
整个的 Recovery Time,恢复时间
和对应的过充都可以控制的非常好
那么我们的穿越频率 fc 就和恢复时间直接相关
过充 △V 可以根据我们对应的整个回路的输出阻抗
和 △I 负载跳变的数值来进行简单的计算
表格里面列的是电压模式控制的优点和缺点
那么电压模式多个 DC BUCK 之间更加容易同步
电压调整率与输出负载或者输入电流无关
相应的负载调整也会比较好
对于噪声对于 noise 不太敏感
相应的一些缺点有
需要高增益的高带宽的误差放大器
补偿网络的元器件数目比较多
补偿回路的调节会比较麻烦
输出电感对应的降额会影响到整个补偿回路的特性
那么在多相并联的时候
需要额外的电流环路来进行均流
图上显示的是以 TPS40170 为例的一个的 DC BUCK
输入从10V到60V,输出是5V
输出电流从0A到6A
预设的开关频率是频率是300k
首先我们要校验最小导通时间是否符合要求
那么在进行类似的设计的时候
只要在 TI 的网站上 WEBENCH 里面输入
你所需要的参数输入输出电流
那么WEBENCH会根据所需要的输入输出规格
计算出所需要的电感电容的值
给出相应的原理图
环路补偿的参数,包括最终的原理图和 BOM
以及一些相关的指标
波特图,相频裕量和幅值裕量
和效率曲线的一些
图上显示的是以 TPS40170 EVM 板为例
在 WEBENCH 上进行计算设计
然后根据实际的参数做对比测试
那么我们可以看到整个的
测试结果和计算结果是非常吻合的
这个是电压模式的 TPS40170 的对应的原理图
那么输入 HPA578 可以在 TI 网站上搜到相关的文档
有详细的原理图 BOM 以及测试结果
电流模式和电压模式的最大区别就是在电压模式当中
从输入电压引入前馈得到一个斜锯齿波
和误差放大器的输出电压进行比较
产生占空比
那么在电流模式呢
我们从电感电流引入电流信号
和误差放大器的输出电压进行比较
产生带占空比的波形
这样就引入了一个电流内环和电压外环
电流模式有峰值电流模式和平均值电流模式
那么现在在 DC BUCK 的应用里面
峰值电流模式的应用会更多一些
在峰值电流模式下
那么电感电流在一个小信号模型
或者在用比较短的时间内可以看作是恒定的
或者说把电感作为一个恒流源来处理
电感电流的检测通常有 DCR Sensing 的模式
这种模式在低压大电流的输出场合应用会比较多
也有在电感后面串小电阻来检测电感电流
或者是在上管检测MOS管上的信号来检测电感电流的
那么在电流模式情况下
占空比如果超过50%
需要对电感电流进行谐波补偿
防止发生次谐波震荡
图上我们可以看到电压模式和电流模式的对比
那么在电压模式的情况下
我们的主功率回路是由输出电感输出电容构成
波特图对应的有一个LC双极点
相频图在转频率点会有180度的相移
那么在电流模式
这个时候电感电流我们可以看做是恒定的
把电感作为一个恒流源来处理
这个时候呢LC双极点就会变为一个单极点
对应的相移也会减小到90度
在电流模式下我们可以看到主功率回路
就变成了一个单极点系统
那么相应的补偿网络我们可以用二型的补偿网络
就可以得到一个稳定的闭环系统
电流回路的补偿相对电压模式来说
会简单一些,元器件数目会少一些
表格里面显示的是电流模式的优点和缺点
电流模式呢因为把电感电流作为一个恒流源来处理
那么相应地我们可以采用二型的补偿网络
就可以得到一个稳定的闭环系统
内环电流环可以提高整个系统的动态响应特性
更容易实现 cycle-by-cycle 的限流模式
对于多个模块的均流相对于电压模式更容易实现一些
那么电流模式有一些缺点或者说是劣势
需要对占空比超过50%的工作模式进行斜率补偿
斜率校正防止发生次谐波振荡
对于 noise 或者对于噪声非常的敏感
因为对于噪声或者说对于开关带来的 spike
就会导致最小导通时间比较长
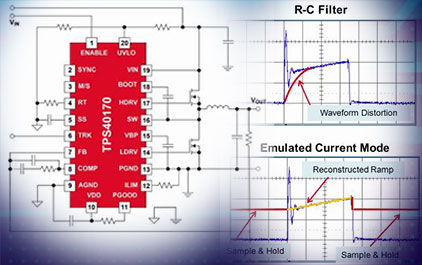
拟合电流模式控制方式
那么拟合电流控制方式电流的取样是从
下管续流管来取样电流
电流信号并不是真实的电感电流
而是通过采样保持器来生成的
或者说重新构建的电感电流波形
那么这个电流波形和实际的电感电流波形
是同步的或者是一致的
在峰值电流模式控制的时候呢
我们通常需要加 RC 的滤波器
对电流采样波形进行噪声滤除
或者是采用 blanking time 对前沿进行消隐
以避免噪声对整个控制回路造成干扰
或者是引起控制回路误动作
那么在拟合电流模式对于重新构建或重新拟合出来的电流
是没有这个噪声的
可以减小或者说避免这个滤波所带来的延时
降低 minimum on-time 的时间
图上显示的是拟合电流模式的原理框图
根据电路的电感值和电流检测电阻 Rs 的值
我们可以选择合适的电容 Cramp
确保我们的峰值和电感电流是一致的
或者说构建出来的电流信号和电感电流是同步的
拟合一致的
保证我们的电流控制模式是正常和稳定的
拟合电流模式在保留了
电流模式的所有的优点的前提下
那么额外地可以减小 minimum on-time 时间
去除了开关噪声
开关的 Spike 会对控制回路造成的干扰
避免了电流模式对噪声敏感的一个问题
图上是拟合电流控制模式 LM5116 的一个设计示范
输入是从7V到60V,输出电压5V,最大电流7A
设定工作频率是250kHz
从计算结果看
minimum on-time 是符合我们的设计要求的
那么对应在实际设计的时候
我们可以在 WEBENCH 上
输入相应的指标
输入输入电压、输出电压、输出电流和预期的温升
WEBENCH 会自动地仿真和计算给出一个原理图,BOM
包括一些指标特性、效率曲线
图上显示的是
LM5116EVM 板的实际测试波形和一些指标
我们可以看到这个指标和仿真出来的结果是非常吻合的
动态指标也非常的好
图上是根据 WEBENCH 仿真结果
最终得到的原理图输出
对应的原理图和EVM板
在 TI 的网站上都可以搜索的到
都可以下载相应的测试文档、原理图、BOM
定频的DCDC的控制方式
主要是有电压模式、电流模式和数字控制的方式
大家根据产品的实际需求
根据产品的指标以后
选择不同的控制模式
对应不同的控制方式和具体的产品型号
那么在这个设计里面 WEBENCH 是一个非常好的工具
可以快速的筛选出你所需要的控制器
给出需要的原理图
包括一些前期的仿真的的指标、效率、温升
和一些补偿回路的参数以及波特图
定频的 DC/DC BUCK 控制方式主要的分为以下几种 电压模式、数字模式和电流模式 那么接下来我们会重点介绍电压模式、电流模式 图上显示的是定频电压模式 DC BUCK 主要的框图 主要有三部分组成,第一个是功率回路 第二个是补偿回路和PWM比较器 功率回路的上下管交替导通 产生一个带占空比的方波 功率脉冲通过LC组成的低通滤波器之后 输出一个稳定的直流 那么输出电流和输出电压的关系是输出电压乘以duty cycle 通常电压模式,我们需要三型网络才能够 对整个控制器进行比较好的补偿 构成一个稳定的环路和得到比较好的动态指标 在图上我们可以看到输出电压通过一个分压网络 得到反馈的电压信号 电压信号输入到误差放大器 误差放大器根据反馈信号得到一个输出的误差信号 那么这个误差跟随信号和锯齿波做一个比较 产生带占空比调制的驱动波形 驱动波形送到功率级驱动上下管交替导通 构成一个稳定的闭环 图上显示的是功率回路的传递函数和波特图 我们可以看到主功率回路由输出电感和电容构成 构成了 LC 双极点和 ESR 对应的零点 图上显示的是 PWM 比较器的工作过程 我们可以看到误差放大器输出的误差电压跟随信号 和固定的斜锯齿波三角波比较 那么在误差电压信号发生变化的时候 相应的占空比会跟随误差电压的变化 输出不同的脉宽 那么带占空比的启动信号输入到功率级推动上下管 就会产生带占空比的功率脉冲调节输出端的 DC 电压 脉宽调制器的增益就等于 VIN 输入电压除以斜三角波的峰值 VRamp 在电压模式下,随着输入电压的变化 脉宽调制器的增益是在变的 对应于不同的输入电压或者是宽范围输入电压 那么这个增益的变化带来环路补偿上的问题是非常麻烦的 对应输入电压的变化通常我们通常会引入前馈 前馈的作用使得斜三角波的 VRamp 电压 跟随输入电压的变化而变化 从图上我们可以看到 如果说 VRamp 跟随输入电压 以一个固定的比例在变化,那么在整个的增益环节里面 就可以把 VIN 这个因素抵消掉 从图上的波形我们可以看到 在输入电压变化的时候 对应的 RAMP 的峰值也在做相应的调整 那么就可以把输入电压对环路的影响从原理上消除掉 图上显示的是 一个 DCDC BUCK 在负载做 1A 跳变时候 对应的输出电压的过冲 图上我们看到在补偿网络没有进行优化 或者说进行校正的时候 整个的特性都是非常的糟糕,有非常多的振荡 过程 △V 幅值也会偏高 那么我们进行补偿或者说进行环路校正的目的 就是在整个负载范围内得到一个稳定的输出 动态负载会有一个非常好的输出波形 比较小 的△V 和恢复时间 补偿回路通常为三种 一型是单极点,二型是两个极点和一个零点 三型是三个极点和两个零点 电压模式控制方式通常需要三型补偿网络 才能够对整个回路进行比较好的补偿 得到足够的相位裕量和幅值裕量 在波特图上我们可以看到有两个零点、三个极点 在图上可以看到我们把主功率回路的波特图 和补偿网络的波特图合起来就可以得到最终的 整个环路和稳定的 DC BUCK 的一个波特图 那么通常我们会放置两个零点抵消双极点 或使整个的最终的那个波特图 以-20dB 的斜率穿越零点 那么这个时候对应的 这个时候对应的幅值裕量和相位裕量都是足够的 通常这个穿越频率取开关频率的的十分之一 最多会取到开关频率的四分之一 环路补偿会影响到我们的动态指标和稳定性 在对误差网络进行比较好的补偿之后 动态负载的测试里面就可以看到 整个的 Recovery Time,恢复时间 和对应的过充都可以控制的非常好 那么我们的穿越频率 fc 就和恢复时间直接相关 过充 △V 可以根据我们对应的整个回路的输出阻抗 和 △I 负载跳变的数值来进行简单的计算 表格里面列的是电压模式控制的优点和缺点 那么电压模式多个 DC BUCK 之间更加容易同步 电压调整率与输出负载或者输入电流无关 相应的负载调整也会比较好 对于噪声对于 noise 不太敏感 相应的一些缺点有 需要高增益的高带宽的误差放大器 补偿网络的元器件数目比较多 补偿回路的调节会比较麻烦 输出电感对应的降额会影响到整个补偿回路的特性 那么在多相并联的时候 需要额外的电流环路来进行均流 图上显示的是以 TPS40170 为例的一个的 DC BUCK 输入从10V到60V,输出是5V 输出电流从0A到6A 预设的开关频率是频率是300k 首先我们要校验最小导通时间是否符合要求 那么在进行类似的设计的时候 只要在 TI 的网站上 WEBENCH 里面输入 你所需要的参数输入输出电流 那么WEBENCH会根据所需要的输入输出规格 计算出所需要的电感电容的值 给出相应的原理图 环路补偿的参数,包括最终的原理图和 BOM 以及一些相关的指标 波特图,相频裕量和幅值裕量 和效率曲线的一些 图上显示的是以 TPS40170 EVM 板为例 在 WEBENCH 上进行计算设计 然后根据实际的参数做对比测试 那么我们可以看到整个的 测试结果和计算结果是非常吻合的 这个是电压模式的 TPS40170 的对应的原理图 那么输入 HPA578 可以在 TI 网站上搜到相关的文档 有详细的原理图 BOM 以及测试结果 电流模式和电压模式的最大区别就是在电压模式当中 从输入电压引入前馈得到一个斜锯齿波 和误差放大器的输出电压进行比较 产生占空比 那么在电流模式呢 我们从电感电流引入电流信号 和误差放大器的输出电压进行比较 产生带占空比的波形 这样就引入了一个电流内环和电压外环 电流模式有峰值电流模式和平均值电流模式 那么现在在 DC BUCK 的应用里面 峰值电流模式的应用会更多一些 在峰值电流模式下 那么电感电流在一个小信号模型 或者在用比较短的时间内可以看作是恒定的 或者说把电感作为一个恒流源来处理 电感电流的检测通常有 DCR Sensing 的模式 这种模式在低压大电流的输出场合应用会比较多 也有在电感后面串小电阻来检测电感电流 或者是在上管检测MOS管上的信号来检测电感电流的 那么在电流模式情况下 占空比如果超过50% 需要对电感电流进行谐波补偿 防止发生次谐波震荡 图上我们可以看到电压模式和电流模式的对比 那么在电压模式的情况下 我们的主功率回路是由输出电感输出电容构成 波特图对应的有一个LC双极点 相频图在转频率点会有180度的相移 那么在电流模式 这个时候电感电流我们可以看做是恒定的 把电感作为一个恒流源来处理 这个时候呢LC双极点就会变为一个单极点 对应的相移也会减小到90度 在电流模式下我们可以看到主功率回路 就变成了一个单极点系统 那么相应的补偿网络我们可以用二型的补偿网络 就可以得到一个稳定的闭环系统 电流回路的补偿相对电压模式来说 会简单一些,元器件数目会少一些 表格里面显示的是电流模式的优点和缺点 电流模式呢因为把电感电流作为一个恒流源来处理 那么相应地我们可以采用二型的补偿网络 就可以得到一个稳定的闭环系统 内环电流环可以提高整个系统的动态响应特性 更容易实现 cycle-by-cycle 的限流模式 对于多个模块的均流相对于电压模式更容易实现一些 那么电流模式有一些缺点或者说是劣势 需要对占空比超过50%的工作模式进行斜率补偿 斜率校正防止发生次谐波振荡 对于 noise 或者对于噪声非常的敏感 因为对于噪声或者说对于开关带来的 spike 就会导致最小导通时间比较长 拟合电流模式控制方式 那么拟合电流控制方式电流的取样是从 下管续流管来取样电流 电流信号并不是真实的电感电流 而是通过采样保持器来生成的 或者说重新构建的电感电流波形 那么这个电流波形和实际的电感电流波形 是同步的或者是一致的 在峰值电流模式控制的时候呢 我们通常需要加 RC 的滤波器 对电流采样波形进行噪声滤除 或者是采用 blanking time 对前沿进行消隐 以避免噪声对整个控制回路造成干扰 或者是引起控制回路误动作 那么在拟合电流模式对于重新构建或重新拟合出来的电流 是没有这个噪声的 可以减小或者说避免这个滤波所带来的延时 降低 minimum on-time 的时间 图上显示的是拟合电流模式的原理框图 根据电路的电感值和电流检测电阻 Rs 的值 我们可以选择合适的电容 Cramp 确保我们的峰值和电感电流是一致的 或者说构建出来的电流信号和电感电流是同步的 拟合一致的 保证我们的电流控制模式是正常和稳定的 拟合电流模式在保留了 电流模式的所有的优点的前提下 那么额外地可以减小 minimum on-time 时间 去除了开关噪声 开关的 Spike 会对控制回路造成的干扰 避免了电流模式对噪声敏感的一个问题 图上是拟合电流控制模式 LM5116 的一个设计示范 输入是从7V到60V,输出电压5V,最大电流7A 设定工作频率是250kHz 从计算结果看 minimum on-time 是符合我们的设计要求的 那么对应在实际设计的时候 我们可以在 WEBENCH 上 输入相应的指标 输入输入电压、输出电压、输出电流和预期的温升 WEBENCH 会自动地仿真和计算给出一个原理图,BOM 包括一些指标特性、效率曲线 图上显示的是 LM5116EVM 板的实际测试波形和一些指标 我们可以看到这个指标和仿真出来的结果是非常吻合的 动态指标也非常的好 图上是根据 WEBENCH 仿真结果 最终得到的原理图输出 对应的原理图和EVM板 在 TI 的网站上都可以搜索的到 都可以下载相应的测试文档、原理图、BOM 定频的DCDC的控制方式 主要是有电压模式、电流模式和数字控制的方式 大家根据产品的实际需求 根据产品的指标以后 选择不同的控制模式 对应不同的控制方式和具体的产品型号 那么在这个设计里面 WEBENCH 是一个非常好的工具 可以快速的筛选出你所需要的控制器 给出需要的原理图 包括一些前期的仿真的的指标、效率、温升 和一些补偿回路的参数以及波特图
定频的 DC/DC BUCK 控制方式主要的分为以下几种
电压模式、数字模式和电流模式
那么接下来我们会重点介绍电压模式、电流模式
图上显示的是定频电压模式 DC BUCK 主要的框图
主要有三部分组成,第一个是功率回路
第二个是补偿回路和PWM比较器
功率回路的上下管交替导通 产生一个带占空比的方波
功率脉冲通过LC组成的低通滤波器之后
输出一个稳定的直流
那么输出电流和输出电压的关系是输出电压乘以duty cycle
通常电压模式,我们需要三型网络才能够
对整个控制器进行比较好的补偿
构成一个稳定的环路和得到比较好的动态指标
在图上我们可以看到输出电压通过一个分压网络
得到反馈的电压信号
电压信号输入到误差放大器
误差放大器根据反馈信号得到一个输出的误差信号
那么这个误差跟随信号和锯齿波做一个比较
产生带占空比调制的驱动波形
驱动波形送到功率级驱动上下管交替导通
构成一个稳定的闭环
图上显示的是功率回路的传递函数和波特图
我们可以看到主功率回路由输出电感和电容构成
构成了 LC 双极点和 ESR 对应的零点
图上显示的是 PWM 比较器的工作过程
我们可以看到误差放大器输出的误差电压跟随信号
和固定的斜锯齿波三角波比较
那么在误差电压信号发生变化的时候
相应的占空比会跟随误差电压的变化
输出不同的脉宽
那么带占空比的启动信号输入到功率级推动上下管
就会产生带占空比的功率脉冲调节输出端的 DC 电压
脉宽调制器的增益就等于
VIN 输入电压除以斜三角波的峰值 VRamp
在电压模式下,随着输入电压的变化
脉宽调制器的增益是在变的
对应于不同的输入电压或者是宽范围输入电压
那么这个增益的变化带来环路补偿上的问题是非常麻烦的
对应输入电压的变化通常我们通常会引入前馈
前馈的作用使得斜三角波的 VRamp 电压
跟随输入电压的变化而变化
从图上我们可以看到
如果说 VRamp 跟随输入电压
以一个固定的比例在变化,那么在整个的增益环节里面
就可以把 VIN 这个因素抵消掉
从图上的波形我们可以看到
在输入电压变化的时候
对应的 RAMP 的峰值也在做相应的调整
那么就可以把输入电压对环路的影响从原理上消除掉
图上显示的是
一个 DCDC BUCK 在负载做 1A 跳变时候
对应的输出电压的过冲
图上我们看到在补偿网络没有进行优化
或者说进行校正的时候
整个的特性都是非常的糟糕,有非常多的振荡
过程 △V 幅值也会偏高
那么我们进行补偿或者说进行环路校正的目的
就是在整个负载范围内得到一个稳定的输出
动态负载会有一个非常好的输出波形
比较小 的△V 和恢复时间
补偿回路通常为三种
一型是单极点,二型是两个极点和一个零点
三型是三个极点和两个零点
电压模式控制方式通常需要三型补偿网络
才能够对整个回路进行比较好的补偿
得到足够的相位裕量和幅值裕量
在波特图上我们可以看到有两个零点、三个极点
在图上可以看到我们把主功率回路的波特图
和补偿网络的波特图合起来就可以得到最终的
整个环路和稳定的 DC BUCK 的一个波特图
那么通常我们会放置两个零点抵消双极点
或使整个的最终的那个波特图
以-20dB 的斜率穿越零点
那么这个时候对应的
这个时候对应的幅值裕量和相位裕量都是足够的
通常这个穿越频率取开关频率的的十分之一
最多会取到开关频率的四分之一
环路补偿会影响到我们的动态指标和稳定性
在对误差网络进行比较好的补偿之后
动态负载的测试里面就可以看到
整个的 Recovery Time,恢复时间
和对应的过充都可以控制的非常好
那么我们的穿越频率 fc 就和恢复时间直接相关
过充 △V 可以根据我们对应的整个回路的输出阻抗
和 △I 负载跳变的数值来进行简单的计算
表格里面列的是电压模式控制的优点和缺点
那么电压模式多个 DC BUCK 之间更加容易同步
电压调整率与输出负载或者输入电流无关
相应的负载调整也会比较好
对于噪声对于 noise 不太敏感
相应的一些缺点有
需要高增益的高带宽的误差放大器
补偿网络的元器件数目比较多
补偿回路的调节会比较麻烦
输出电感对应的降额会影响到整个补偿回路的特性
那么在多相并联的时候
需要额外的电流环路来进行均流
图上显示的是以 TPS40170 为例的一个的 DC BUCK
输入从10V到60V,输出是5V
输出电流从0A到6A
预设的开关频率是频率是300k
首先我们要校验最小导通时间是否符合要求
那么在进行类似的设计的时候
只要在 TI 的网站上 WEBENCH 里面输入
你所需要的参数输入输出电流
那么WEBENCH会根据所需要的输入输出规格
计算出所需要的电感电容的值
给出相应的原理图
环路补偿的参数,包括最终的原理图和 BOM
以及一些相关的指标
波特图,相频裕量和幅值裕量
和效率曲线的一些
图上显示的是以 TPS40170 EVM 板为例
在 WEBENCH 上进行计算设计
然后根据实际的参数做对比测试
那么我们可以看到整个的
测试结果和计算结果是非常吻合的
这个是电压模式的 TPS40170 的对应的原理图
那么输入 HPA578 可以在 TI 网站上搜到相关的文档
有详细的原理图 BOM 以及测试结果
电流模式和电压模式的最大区别就是在电压模式当中
从输入电压引入前馈得到一个斜锯齿波
和误差放大器的输出电压进行比较
产生占空比
那么在电流模式呢
我们从电感电流引入电流信号
和误差放大器的输出电压进行比较
产生带占空比的波形
这样就引入了一个电流内环和电压外环
电流模式有峰值电流模式和平均值电流模式
那么现在在 DC BUCK 的应用里面
峰值电流模式的应用会更多一些
在峰值电流模式下
那么电感电流在一个小信号模型
或者在用比较短的时间内可以看作是恒定的
或者说把电感作为一个恒流源来处理
电感电流的检测通常有 DCR Sensing 的模式
这种模式在低压大电流的输出场合应用会比较多
也有在电感后面串小电阻来检测电感电流
或者是在上管检测MOS管上的信号来检测电感电流的
那么在电流模式情况下
占空比如果超过50%
需要对电感电流进行谐波补偿
防止发生次谐波震荡
图上我们可以看到电压模式和电流模式的对比
那么在电压模式的情况下
我们的主功率回路是由输出电感输出电容构成
波特图对应的有一个LC双极点
相频图在转频率点会有180度的相移
那么在电流模式
这个时候电感电流我们可以看做是恒定的
把电感作为一个恒流源来处理
这个时候呢LC双极点就会变为一个单极点
对应的相移也会减小到90度
在电流模式下我们可以看到主功率回路
就变成了一个单极点系统
那么相应的补偿网络我们可以用二型的补偿网络
就可以得到一个稳定的闭环系统
电流回路的补偿相对电压模式来说
会简单一些,元器件数目会少一些
表格里面显示的是电流模式的优点和缺点
电流模式呢因为把电感电流作为一个恒流源来处理
那么相应地我们可以采用二型的补偿网络
就可以得到一个稳定的闭环系统
内环电流环可以提高整个系统的动态响应特性
更容易实现 cycle-by-cycle 的限流模式
对于多个模块的均流相对于电压模式更容易实现一些
那么电流模式有一些缺点或者说是劣势
需要对占空比超过50%的工作模式进行斜率补偿
斜率校正防止发生次谐波振荡
对于 noise 或者对于噪声非常的敏感
因为对于噪声或者说对于开关带来的 spike
就会导致最小导通时间比较长
拟合电流模式控制方式
那么拟合电流控制方式电流的取样是从
下管续流管来取样电流
电流信号并不是真实的电感电流
而是通过采样保持器来生成的
或者说重新构建的电感电流波形
那么这个电流波形和实际的电感电流波形
是同步的或者是一致的
在峰值电流模式控制的时候呢
我们通常需要加 RC 的滤波器
对电流采样波形进行噪声滤除
或者是采用 blanking time 对前沿进行消隐
以避免噪声对整个控制回路造成干扰
或者是引起控制回路误动作
那么在拟合电流模式对于重新构建或重新拟合出来的电流
是没有这个噪声的
可以减小或者说避免这个滤波所带来的延时
降低 minimum on-time 的时间
图上显示的是拟合电流模式的原理框图
根据电路的电感值和电流检测电阻 Rs 的值
我们可以选择合适的电容 Cramp
确保我们的峰值和电感电流是一致的
或者说构建出来的电流信号和电感电流是同步的
拟合一致的
保证我们的电流控制模式是正常和稳定的
拟合电流模式在保留了
电流模式的所有的优点的前提下
那么额外地可以减小 minimum on-time 时间
去除了开关噪声
开关的 Spike 会对控制回路造成的干扰
避免了电流模式对噪声敏感的一个问题
图上是拟合电流控制模式 LM5116 的一个设计示范
输入是从7V到60V,输出电压5V,最大电流7A
设定工作频率是250kHz
从计算结果看
minimum on-time 是符合我们的设计要求的
那么对应在实际设计的时候
我们可以在 WEBENCH 上
输入相应的指标
输入输入电压、输出电压、输出电流和预期的温升
WEBENCH 会自动地仿真和计算给出一个原理图,BOM
包括一些指标特性、效率曲线
图上显示的是
LM5116EVM 板的实际测试波形和一些指标
我们可以看到这个指标和仿真出来的结果是非常吻合的
动态指标也非常的好
图上是根据 WEBENCH 仿真结果
最终得到的原理图输出
对应的原理图和EVM板
在 TI 的网站上都可以搜索的到
都可以下载相应的测试文档、原理图、BOM
定频的DCDC的控制方式
主要是有电压模式、电流模式和数字控制的方式
大家根据产品的实际需求
根据产品的指标以后
选择不同的控制模式
对应不同的控制方式和具体的产品型号
那么在这个设计里面 WEBENCH 是一个非常好的工具
可以快速的筛选出你所需要的控制器
给出需要的原理图
包括一些前期的仿真的的指标、效率、温升
和一些补偿回路的参数以及波特图
手机看
扫码用手机观看
 视频简介
视频简介
定频降压型变换器的控制策略(下)
所属课程:定频降压型变换器的控制策略
发布时间:2015.10.28
视频集数:2
本节视频时长:00:16:24
为了满足负载点应用的需要,选择用非隔离式降压转换器拓扑将配电电压减少到更低电平,这是一个比较易于实现的方法。降压拓扑比较简单,使用的组件相对较少,并且可针对多种应用进行配置。不过,选择用何种方法来控制转换器就不是那么的简单而直接了。在这个主题下,我们会仔细来看一看降压转换器的操作和基本设计注意事项。随后的讨论会检查2种定频控制策略间的优缺点,以及扩展两种策略功能的某些改进。讨论的定频控制策略包括自适应输入电压前馈的基本电压模式控制、电流模式控制和仿真电流模式控制。我们会讨论每项技术的亮点和难点,并且演示所选出的设计示例。在跟进的话题中,即“选择正确的可变频降压稳压器控制策略”,给出了恒定接通时间控制以及其变量。



 未学习 定频降压型变换器的控制策略(上)
未学习 定频降压型变换器的控制策略(上)
 未学习 定频降压型变换器的控制策略(下)
未学习 定频降压型变换器的控制策略(下)


