定频降压型变换器的控制策略(上)
Loading the player...
将在30s后自动为您播放下一课程
大家好 我是TI电压参考设计团队的 应用工程师 Jason Yu 这个 topic 给大家介绍一下 TI 定频 DC buck 控制器的 控制策略,特点和分析 DC buck 的应用范围非常广 对应不同的客户要求 不同的产品应用 那么 TI 有非常多的 buck 产品 主要分为两大类 第一类是定频的控制方式 第二类是变频的控制方式 那么这一部分我们首先介绍一下 DCDC buck 的基本的工作模式 输出滤波器的设计 固定频率和变频的比较 定频的控制模式 主要介绍电压模式,电流模式 主要介绍电压模式,电流模式 和拟合电流模式的控制方式 buck 的功率回路结构比较简单 由上下管,输出电感,输出电容组成 那么上下管交替导通 产生带占空比的功率脉冲 功率脉冲通过由电感和电容 组成的低通滤波器之后 输出一个稳定的直流电压 输入和输出的关系是 输入乘以 duty cycle 就等于输出电压值 输入乘以 duty cycle 就等于输出电压值 图上是工作在 CCM 模式下的 同步 buck 各个点的工作波形 从上往下我们可以看到 上管的驱动,下管的驱动 SW 端的电流,续流管的电流 包括 SW 的电压输出电压 和电感电流的波形 那么 duty cycle 就等于 Ton / (Ton + Toff) 在 CCM 模式下 第一个工作模态,上管导通 那么这个时候输入电压通过上管 给输出电感开始充电 电感的电流以一个固定的斜率 (Vin - Vout) /L,往上升 在这个工作间隔内,我们可以看到 输出的电感电流 以一个固定的斜率往上升 功率从输入端 通过 MOS 管和输出电感 向负载和电容放电 在下一个工作模态 上管关断,下管导通 下管进入续流状态 那么这个时候电感电流 以一个斜率往下降 续流二极管导通 能量由电感开始往负载和输出电容转移 那么在这个工作间隔内 我们可以看到电感电流 以一个固定的斜率往下降 能量从电感转移到负载端和输出电容端 那么这个是下一个情况 或者下一个周期的开始 这个时候下管开始关断 上管开始导通 图上显示的是 工作在 DCM 断续模式下的 buck 各个点的工作波形 从上往下我们可以看到 上管的驱动,下管的驱动 SW 端的电流波形 续流二极管的电流波形 包括 SW 端的电压,输出电压 和电感电流的波形 那么跟 CCM 相比 最大的区别就是电感电流会恢复到零 duty cycle = Ton / (Ton + Toff + Tdead) 在第一个工作模态 我们可以看到上管导通 能量从输入端 通过上管开始,流经电感 电感电流以一个固定的斜率往上升 那么下一个工作模态上管关断 下管开始导通 那么这个时候能量就从电感开始 往输出电容和负载转移 电感电流以一个固定的斜率往下降 在这个工作模态 电感电流会一直放到零 那么放到零之后 就进入到一个固定的间隔时间 或者说是死区时间 我们可以看到在这个间隔内 电感电流会恢复到零 这个时候上管下管都是关断的 duty cycle = Ton / (Ton + Toff + Tdead) buck 电路的设计 输出 LC 的设计非常重要 通常我们根据所需要的输出指标 来选择相应的电感和电容的值 那么电感的值呢 通常先设定我们需要的 输出电流纹波 △I 通常选择10%到30% 选定电流纹波之后 根据相应的公式 根据输入和输出的电压 和期望的占空比 以及相应的开关频率 来计算所希望的电感值 那么电容的选择 主要的取决于输出纹波电压的选择 通常纹波电压就等于 输出电容的 ESR 乘以输出电感的电流纹波 △I 输出电容的选择非常重要 输出电容的选择决定了 输出纹波动态的特性 那么通常用的输入电容有以下几种 陶瓷电容,铝电解电容 铝 polymer 电容和钽 polymer 电容 每一种电容有相应的特性,价格 那么我们在设计的时候 要按照所需要的指标 包括成本的考虑 来选择不同的电容种类 常用的 buck 的输出电感有以下几种 工字电感,一体成型电感 和绕组成型电感 功率铁粉芯 那么不同的电感有不同的应用场合 价格也不一样 通常像工字电感会用在比较廉价的场合 或者是对成本要求比较高的场合 当然相应的它的 DCR 啊 power loss 会比较高一些 那么功率铁粉芯 相应的它的 power loss 会比较低 DCR 也非常小 但是呢电感值一般做的不会太大 通常是用在 VRM 低压大电流的场合 根据实际的需要 我们要按不同的指标 来选择不同的电感类型 图上显示的是主功率回路的小信号模型 根据这个小信号模型 我们可以得到主功率的传递函数 然后画出它的对应的波特图 我们可以看到对应的相频图和幅频图 通常的 DC buck 转折频率点 一般是在5k左右 对应的 ESR 的零点会在21k ESL 对应的零点会在240k左右 输入滤波器的设计 对于动态指标的影响也非常大 通常我们需要按照动态负载的 slew rate 来选择输出电感值 按照上冲或者是下冲 △V 的幅度 来选择对应的输出电容的容量 那么按照图上的公式 我们可以近似地计算出 所需要的电感的值和电容的值 在 DC/DC buck 的设计当中 非常重要的一个指标 是控制器的最小导通时间 那么这个最小导通时间 来源于驱动的延时 反馈补偿回路的延时 和 PWM 比较器的延时 那么最小导通时间决定了 我们的控制器能够应用的 对应的输入输出和工作频率 通常在进行设计之前 我们需要核算控制器的最小导通时间 是否符合我们所做的 DC buck 的要求 以 TPS40170 为例 控制器的最小导通时间是100ns 那么在输入电压是60V 输出电压是5V和3.3V的时候 我们选定开关频率为600k 那么,按照公式 我们可以计算出最小导通时间 在5V的时候 最小导通时间是140ns 那么这个控制器是符合这个应用的 但是在3.3V的时候呢 这个最小导通时间需要的是91个ns 那么对于3.3V来说 40170 如果工作在600k的开关频率是不合适的 这个时候我们需要适当的降低开关频率 满足最小导通时间的要求 那么这个是固定频率的工作模式 和变频的工作模式一些简单的对比 定频的工作模式呢 不同的 DC buck 或者是多个 buck 可以 简单的同步 或者是做 interleave 交错并联 可以起到纹波对消的 减少在输出端的电容 ESR 和 PCB 上的损耗 那么 EMI 的峰值相应会比较高一些 同时受到最小导通时间 最小占空比的限制 变频的控制方式 那么变频的控制方式呢 它的补偿回路更容易调试 或者说是基本上不需要 或者说是基本上不需要 对补偿回路进行调试 EMI 的峰值会比较低 但是平均值一般会偏高 变频的工作方式呢 动态负载特性非常好 响应非常地快 回路补偿的器件非常的少 相比定频的工作模式 变频的回路补偿过程非常简单
大家好 我是TI电压参考设计团队的 应用工程师 Jason Yu 这个 topic 给大家介绍一下 TI 定频 DC buck 控制器的 控制策略,特点和分析 DC buck 的应用范围非常广 对应不同的客户要求 不同的产品应用 那么 TI 有非常多的 buck 产品 主要分为两大类 第一类是定频的控制方式 第二类是变频的控制方式 那么这一部分我们首先介绍一下 DCDC buck 的基本的工作模式 输出滤波器的设计 固定频率和变频的比较 定频的控制模式 主要介绍电压模式,电流模式 主要介绍电压模式,电流模式 和拟合电流模式的控制方式 buck 的功率回路结构比较简单 由上下管,输出电感,输出电容组成 那么上下管交替导通 产生带占空比的功率脉冲 功率脉冲通过由电感和电容 组成的低通滤波器之后 输出一个稳定的直流电压 输入和输出的关系是 输入乘以 duty cycle 就等于输出电压值 输入乘以 duty cycle 就等于输出电压值 图上是工作在 CCM 模式下的 同步 buck 各个点的工作波形 从上往下我们可以看到 上管的驱动,下管的驱动 SW 端的电流,续流管的电流 包括 SW 的电压输出电压 和电感电流的波形 那么 duty cycle 就等于 Ton / (Ton + Toff) 在 CCM 模式下 第一个工作模态,上管导通 那么这个时候输入电压通过上管 给输出电感开始充电 电感的电流以一个固定的斜率 (Vin - Vout) /L,往上升 在这个工作间隔内,我们可以看到 输出的电感电流 以一个固定的斜率往上升 功率从输入端 通过 MOS 管和输出电感 向负载和电容放电 在下一个工作模态 上管关断,下管导通 下管进入续流状态 那么这个时候电感电流 以一个斜率往下降 续流二极管导通 能量由电感开始往负载和输出电容转移 那么在这个工作间隔内 我们可以看到电感电流 以一个固定的斜率往下降 能量从电感转移到负载端和输出电容端 那么这个是下一个情况 或者下一个周期的开始 这个时候下管开始关断 上管开始导通 图上显示的是 工作在 DCM 断续模式下的 buck 各个点的工作波形 从上往下我们可以看到 上管的驱动,下管的驱动 SW 端的电流波形 续流二极管的电流波形 包括 SW 端的电压,输出电压 和电感电流的波形 那么跟 CCM 相比 最大的区别就是电感电流会恢复到零 duty cycle = Ton / (Ton + Toff + Tdead) 在第一个工作模态 我们可以看到上管导通 能量从输入端 通过上管开始,流经电感 电感电流以一个固定的斜率往上升 那么下一个工作模态上管关断 下管开始导通 那么这个时候能量就从电感开始 往输出电容和负载转移 电感电流以一个固定的斜率往下降 在这个工作模态 电感电流会一直放到零 那么放到零之后 就进入到一个固定的间隔时间 或者说是死区时间 我们可以看到在这个间隔内 电感电流会恢复到零 这个时候上管下管都是关断的 duty cycle = Ton / (Ton + Toff + Tdead) buck 电路的设计 输出 LC 的设计非常重要 通常我们根据所需要的输出指标 来选择相应的电感和电容的值 那么电感的值呢 通常先设定我们需要的 输出电流纹波 △I 通常选择10%到30% 选定电流纹波之后 根据相应的公式 根据输入和输出的电压 和期望的占空比 以及相应的开关频率 来计算所希望的电感值 那么电容的选择 主要的取决于输出纹波电压的选择 通常纹波电压就等于 输出电容的 ESR 乘以输出电感的电流纹波 △I 输出电容的选择非常重要 输出电容的选择决定了 输出纹波动态的特性 那么通常用的输入电容有以下几种 陶瓷电容,铝电解电容 铝 polymer 电容和钽 polymer 电容 每一种电容有相应的特性,价格 那么我们在设计的时候 要按照所需要的指标 包括成本的考虑 来选择不同的电容种类 常用的 buck 的输出电感有以下几种 工字电感,一体成型电感 和绕组成型电感 功率铁粉芯 那么不同的电感有不同的应用场合 价格也不一样 通常像工字电感会用在比较廉价的场合 或者是对成本要求比较高的场合 当然相应的它的 DCR 啊 power loss 会比较高一些 那么功率铁粉芯 相应的它的 power loss 会比较低 DCR 也非常小 但是呢电感值一般做的不会太大 通常是用在 VRM 低压大电流的场合 根据实际的需要 我们要按不同的指标 来选择不同的电感类型 图上显示的是主功率回路的小信号模型 根据这个小信号模型 我们可以得到主功率的传递函数 然后画出它的对应的波特图 我们可以看到对应的相频图和幅频图 通常的 DC buck 转折频率点 一般是在5k左右 对应的 ESR 的零点会在21k ESL 对应的零点会在240k左右 输入滤波器的设计 对于动态指标的影响也非常大 通常我们需要按照动态负载的 slew rate 来选择输出电感值 按照上冲或者是下冲 △V 的幅度 来选择对应的输出电容的容量 那么按照图上的公式 我们可以近似地计算出 所需要的电感的值和电容的值 在 DC/DC buck 的设计当中 非常重要的一个指标 是控制器的最小导通时间 那么这个最小导通时间 来源于驱动的延时 反馈补偿回路的延时 和 PWM 比较器的延时 那么最小导通时间决定了 我们的控制器能够应用的 对应的输入输出和工作频率 通常在进行设计之前 我们需要核算控制器的最小导通时间 是否符合我们所做的 DC buck 的要求 以 TPS40170 为例 控制器的最小导通时间是100ns 那么在输入电压是60V 输出电压是5V和3.3V的时候 我们选定开关频率为600k 那么,按照公式 我们可以计算出最小导通时间 在5V的时候 最小导通时间是140ns 那么这个控制器是符合这个应用的 但是在3.3V的时候呢 这个最小导通时间需要的是91个ns 那么对于3.3V来说 40170 如果工作在600k的开关频率是不合适的 这个时候我们需要适当的降低开关频率 满足最小导通时间的要求 那么这个是固定频率的工作模式 和变频的工作模式一些简单的对比 定频的工作模式呢 不同的 DC buck 或者是多个 buck 可以 简单的同步 或者是做 interleave 交错并联 可以起到纹波对消的 减少在输出端的电容 ESR 和 PCB 上的损耗 那么 EMI 的峰值相应会比较高一些 同时受到最小导通时间 最小占空比的限制 变频的控制方式 那么变频的控制方式呢 它的补偿回路更容易调试 或者说是基本上不需要 或者说是基本上不需要 对补偿回路进行调试 EMI 的峰值会比较低 但是平均值一般会偏高 变频的工作方式呢 动态负载特性非常好 响应非常地快 回路补偿的器件非常的少 相比定频的工作模式 变频的回路补偿过程非常简单
大家好
我是TI电压参考设计团队的
应用工程师 Jason Yu
这个 topic 给大家介绍一下
TI 定频 DC buck 控制器的
控制策略,特点和分析
DC buck 的应用范围非常广
对应不同的客户要求
不同的产品应用
那么 TI 有非常多的 buck 产品
主要分为两大类
第一类是定频的控制方式
第二类是变频的控制方式
那么这一部分我们首先介绍一下
DCDC buck 的基本的工作模式
输出滤波器的设计
固定频率和变频的比较
定频的控制模式
主要介绍电压模式,电流模式
主要介绍电压模式,电流模式
和拟合电流模式的控制方式
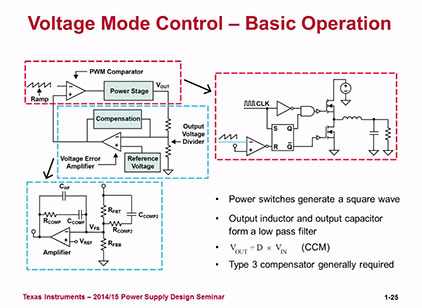
buck 的功率回路结构比较简单
由上下管,输出电感,输出电容组成
那么上下管交替导通
产生带占空比的功率脉冲
功率脉冲通过由电感和电容
组成的低通滤波器之后
输出一个稳定的直流电压
输入和输出的关系是
输入乘以 duty cycle 就等于输出电压值
输入乘以 duty cycle 就等于输出电压值
图上是工作在 CCM 模式下的
同步 buck 各个点的工作波形
从上往下我们可以看到
上管的驱动,下管的驱动
SW 端的电流,续流管的电流
包括 SW 的电压输出电压
和电感电流的波形
那么 duty cycle 就等于
Ton / (Ton + Toff)
在 CCM 模式下
第一个工作模态,上管导通
那么这个时候输入电压通过上管
给输出电感开始充电
电感的电流以一个固定的斜率
(Vin - Vout) /L,往上升
在这个工作间隔内,我们可以看到
输出的电感电流
以一个固定的斜率往上升
功率从输入端
通过 MOS 管和输出电感
向负载和电容放电
在下一个工作模态
上管关断,下管导通
下管进入续流状态
那么这个时候电感电流
以一个斜率往下降
续流二极管导通
能量由电感开始往负载和输出电容转移
那么在这个工作间隔内
我们可以看到电感电流
以一个固定的斜率往下降
能量从电感转移到负载端和输出电容端
那么这个是下一个情况
或者下一个周期的开始
这个时候下管开始关断
上管开始导通
图上显示的是
工作在 DCM 断续模式下的 buck
各个点的工作波形
从上往下我们可以看到
上管的驱动,下管的驱动
SW 端的电流波形
续流二极管的电流波形
包括 SW 端的电压,输出电压
和电感电流的波形
那么跟 CCM 相比
最大的区别就是电感电流会恢复到零
duty cycle = Ton / (Ton + Toff + Tdead)
在第一个工作模态
我们可以看到上管导通
能量从输入端
通过上管开始,流经电感
电感电流以一个固定的斜率往上升
那么下一个工作模态上管关断
下管开始导通
那么这个时候能量就从电感开始
往输出电容和负载转移
电感电流以一个固定的斜率往下降
在这个工作模态
电感电流会一直放到零
那么放到零之后
就进入到一个固定的间隔时间
或者说是死区时间
我们可以看到在这个间隔内
电感电流会恢复到零
这个时候上管下管都是关断的
duty cycle = Ton / (Ton + Toff + Tdead)
buck 电路的设计
输出 LC 的设计非常重要
通常我们根据所需要的输出指标
来选择相应的电感和电容的值
那么电感的值呢
通常先设定我们需要的
输出电流纹波 △I
通常选择10%到30%
选定电流纹波之后
根据相应的公式
根据输入和输出的电压
和期望的占空比
以及相应的开关频率
来计算所希望的电感值
那么电容的选择
主要的取决于输出纹波电压的选择
通常纹波电压就等于
输出电容的 ESR 乘以输出电感的电流纹波 △I
输出电容的选择非常重要
输出电容的选择决定了
输出纹波动态的特性
那么通常用的输入电容有以下几种
陶瓷电容,铝电解电容
铝 polymer 电容和钽 polymer 电容
每一种电容有相应的特性,价格
那么我们在设计的时候
要按照所需要的指标
包括成本的考虑
来选择不同的电容种类
常用的 buck 的输出电感有以下几种
工字电感,一体成型电感
和绕组成型电感
功率铁粉芯
那么不同的电感有不同的应用场合
价格也不一样
通常像工字电感会用在比较廉价的场合
或者是对成本要求比较高的场合
当然相应的它的 DCR 啊
power loss 会比较高一些
那么功率铁粉芯
相应的它的 power loss 会比较低
DCR 也非常小
但是呢电感值一般做的不会太大
通常是用在 VRM 低压大电流的场合
根据实际的需要
我们要按不同的指标
来选择不同的电感类型
图上显示的是主功率回路的小信号模型
根据这个小信号模型
我们可以得到主功率的传递函数
然后画出它的对应的波特图
我们可以看到对应的相频图和幅频图
通常的 DC buck 转折频率点
一般是在5k左右
对应的 ESR 的零点会在21k
ESL 对应的零点会在240k左右
输入滤波器的设计
对于动态指标的影响也非常大
通常我们需要按照动态负载的 slew rate
来选择输出电感值
按照上冲或者是下冲 △V 的幅度
来选择对应的输出电容的容量
那么按照图上的公式
我们可以近似地计算出
所需要的电感的值和电容的值
在 DC/DC buck 的设计当中
非常重要的一个指标
是控制器的最小导通时间
那么这个最小导通时间
来源于驱动的延时
反馈补偿回路的延时
和 PWM 比较器的延时
那么最小导通时间决定了
我们的控制器能够应用的
对应的输入输出和工作频率
通常在进行设计之前
我们需要核算控制器的最小导通时间
是否符合我们所做的 DC buck 的要求
以 TPS40170 为例
控制器的最小导通时间是100ns
那么在输入电压是60V
输出电压是5V和3.3V的时候
我们选定开关频率为600k
那么,按照公式
我们可以计算出最小导通时间
在5V的时候
最小导通时间是140ns
那么这个控制器是符合这个应用的
但是在3.3V的时候呢
这个最小导通时间需要的是91个ns
那么对于3.3V来说
40170 如果工作在600k的开关频率是不合适的
这个时候我们需要适当的降低开关频率
满足最小导通时间的要求
那么这个是固定频率的工作模式
和变频的工作模式一些简单的对比
定频的工作模式呢
不同的 DC buck
或者是多个 buck 可以
简单的同步
或者是做 interleave 交错并联
可以起到纹波对消的
减少在输出端的电容 ESR
和 PCB 上的损耗
那么 EMI 的峰值相应会比较高一些
同时受到最小导通时间
最小占空比的限制
变频的控制方式
那么变频的控制方式呢
它的补偿回路更容易调试
或者说是基本上不需要
或者说是基本上不需要
对补偿回路进行调试
EMI 的峰值会比较低
但是平均值一般会偏高
变频的工作方式呢
动态负载特性非常好
响应非常地快
回路补偿的器件非常的少
相比定频的工作模式
变频的回路补偿过程非常简单
大家好 我是TI电压参考设计团队的 应用工程师 Jason Yu 这个 topic 给大家介绍一下 TI 定频 DC buck 控制器的 控制策略,特点和分析 DC buck 的应用范围非常广 对应不同的客户要求 不同的产品应用 那么 TI 有非常多的 buck 产品 主要分为两大类 第一类是定频的控制方式 第二类是变频的控制方式 那么这一部分我们首先介绍一下 DCDC buck 的基本的工作模式 输出滤波器的设计 固定频率和变频的比较 定频的控制模式 主要介绍电压模式,电流模式 主要介绍电压模式,电流模式 和拟合电流模式的控制方式 buck 的功率回路结构比较简单 由上下管,输出电感,输出电容组成 那么上下管交替导通 产生带占空比的功率脉冲 功率脉冲通过由电感和电容 组成的低通滤波器之后 输出一个稳定的直流电压 输入和输出的关系是 输入乘以 duty cycle 就等于输出电压值 输入乘以 duty cycle 就等于输出电压值 图上是工作在 CCM 模式下的 同步 buck 各个点的工作波形 从上往下我们可以看到 上管的驱动,下管的驱动 SW 端的电流,续流管的电流 包括 SW 的电压输出电压 和电感电流的波形 那么 duty cycle 就等于 Ton / (Ton + Toff) 在 CCM 模式下 第一个工作模态,上管导通 那么这个时候输入电压通过上管 给输出电感开始充电 电感的电流以一个固定的斜率 (Vin - Vout) /L,往上升 在这个工作间隔内,我们可以看到 输出的电感电流 以一个固定的斜率往上升 功率从输入端 通过 MOS 管和输出电感 向负载和电容放电 在下一个工作模态 上管关断,下管导通 下管进入续流状态 那么这个时候电感电流 以一个斜率往下降 续流二极管导通 能量由电感开始往负载和输出电容转移 那么在这个工作间隔内 我们可以看到电感电流 以一个固定的斜率往下降 能量从电感转移到负载端和输出电容端 那么这个是下一个情况 或者下一个周期的开始 这个时候下管开始关断 上管开始导通 图上显示的是 工作在 DCM 断续模式下的 buck 各个点的工作波形 从上往下我们可以看到 上管的驱动,下管的驱动 SW 端的电流波形 续流二极管的电流波形 包括 SW 端的电压,输出电压 和电感电流的波形 那么跟 CCM 相比 最大的区别就是电感电流会恢复到零 duty cycle = Ton / (Ton + Toff + Tdead) 在第一个工作模态 我们可以看到上管导通 能量从输入端 通过上管开始,流经电感 电感电流以一个固定的斜率往上升 那么下一个工作模态上管关断 下管开始导通 那么这个时候能量就从电感开始 往输出电容和负载转移 电感电流以一个固定的斜率往下降 在这个工作模态 电感电流会一直放到零 那么放到零之后 就进入到一个固定的间隔时间 或者说是死区时间 我们可以看到在这个间隔内 电感电流会恢复到零 这个时候上管下管都是关断的 duty cycle = Ton / (Ton + Toff + Tdead) buck 电路的设计 输出 LC 的设计非常重要 通常我们根据所需要的输出指标 来选择相应的电感和电容的值 那么电感的值呢 通常先设定我们需要的 输出电流纹波 △I 通常选择10%到30% 选定电流纹波之后 根据相应的公式 根据输入和输出的电压 和期望的占空比 以及相应的开关频率 来计算所希望的电感值 那么电容的选择 主要的取决于输出纹波电压的选择 通常纹波电压就等于 输出电容的 ESR 乘以输出电感的电流纹波 △I 输出电容的选择非常重要 输出电容的选择决定了 输出纹波动态的特性 那么通常用的输入电容有以下几种 陶瓷电容,铝电解电容 铝 polymer 电容和钽 polymer 电容 每一种电容有相应的特性,价格 那么我们在设计的时候 要按照所需要的指标 包括成本的考虑 来选择不同的电容种类 常用的 buck 的输出电感有以下几种 工字电感,一体成型电感 和绕组成型电感 功率铁粉芯 那么不同的电感有不同的应用场合 价格也不一样 通常像工字电感会用在比较廉价的场合 或者是对成本要求比较高的场合 当然相应的它的 DCR 啊 power loss 会比较高一些 那么功率铁粉芯 相应的它的 power loss 会比较低 DCR 也非常小 但是呢电感值一般做的不会太大 通常是用在 VRM 低压大电流的场合 根据实际的需要 我们要按不同的指标 来选择不同的电感类型 图上显示的是主功率回路的小信号模型 根据这个小信号模型 我们可以得到主功率的传递函数 然后画出它的对应的波特图 我们可以看到对应的相频图和幅频图 通常的 DC buck 转折频率点 一般是在5k左右 对应的 ESR 的零点会在21k ESL 对应的零点会在240k左右 输入滤波器的设计 对于动态指标的影响也非常大 通常我们需要按照动态负载的 slew rate 来选择输出电感值 按照上冲或者是下冲 △V 的幅度 来选择对应的输出电容的容量 那么按照图上的公式 我们可以近似地计算出 所需要的电感的值和电容的值 在 DC/DC buck 的设计当中 非常重要的一个指标 是控制器的最小导通时间 那么这个最小导通时间 来源于驱动的延时 反馈补偿回路的延时 和 PWM 比较器的延时 那么最小导通时间决定了 我们的控制器能够应用的 对应的输入输出和工作频率 通常在进行设计之前 我们需要核算控制器的最小导通时间 是否符合我们所做的 DC buck 的要求 以 TPS40170 为例 控制器的最小导通时间是100ns 那么在输入电压是60V 输出电压是5V和3.3V的时候 我们选定开关频率为600k 那么,按照公式 我们可以计算出最小导通时间 在5V的时候 最小导通时间是140ns 那么这个控制器是符合这个应用的 但是在3.3V的时候呢 这个最小导通时间需要的是91个ns 那么对于3.3V来说 40170 如果工作在600k的开关频率是不合适的 这个时候我们需要适当的降低开关频率 满足最小导通时间的要求 那么这个是固定频率的工作模式 和变频的工作模式一些简单的对比 定频的工作模式呢 不同的 DC buck 或者是多个 buck 可以 简单的同步 或者是做 interleave 交错并联 可以起到纹波对消的 减少在输出端的电容 ESR 和 PCB 上的损耗 那么 EMI 的峰值相应会比较高一些 同时受到最小导通时间 最小占空比的限制 变频的控制方式 那么变频的控制方式呢 它的补偿回路更容易调试 或者说是基本上不需要 或者说是基本上不需要 对补偿回路进行调试 EMI 的峰值会比较低 但是平均值一般会偏高 变频的工作方式呢 动态负载特性非常好 响应非常地快 回路补偿的器件非常的少 相比定频的工作模式 变频的回路补偿过程非常简单
大家好
我是TI电压参考设计团队的
应用工程师 Jason Yu
这个 topic 给大家介绍一下
TI 定频 DC buck 控制器的
控制策略,特点和分析
DC buck 的应用范围非常广
对应不同的客户要求
不同的产品应用
那么 TI 有非常多的 buck 产品
主要分为两大类
第一类是定频的控制方式
第二类是变频的控制方式
那么这一部分我们首先介绍一下
DCDC buck 的基本的工作模式
输出滤波器的设计
固定频率和变频的比较
定频的控制模式
主要介绍电压模式,电流模式
主要介绍电压模式,电流模式
和拟合电流模式的控制方式
buck 的功率回路结构比较简单
由上下管,输出电感,输出电容组成
那么上下管交替导通
产生带占空比的功率脉冲
功率脉冲通过由电感和电容
组成的低通滤波器之后
输出一个稳定的直流电压
输入和输出的关系是
输入乘以 duty cycle 就等于输出电压值
输入乘以 duty cycle 就等于输出电压值
图上是工作在 CCM 模式下的
同步 buck 各个点的工作波形
从上往下我们可以看到
上管的驱动,下管的驱动
SW 端的电流,续流管的电流
包括 SW 的电压输出电压
和电感电流的波形
那么 duty cycle 就等于
Ton / (Ton + Toff)
在 CCM 模式下
第一个工作模态,上管导通
那么这个时候输入电压通过上管
给输出电感开始充电
电感的电流以一个固定的斜率
(Vin - Vout) /L,往上升
在这个工作间隔内,我们可以看到
输出的电感电流
以一个固定的斜率往上升
功率从输入端
通过 MOS 管和输出电感
向负载和电容放电
在下一个工作模态
上管关断,下管导通
下管进入续流状态
那么这个时候电感电流
以一个斜率往下降
续流二极管导通
能量由电感开始往负载和输出电容转移
那么在这个工作间隔内
我们可以看到电感电流
以一个固定的斜率往下降
能量从电感转移到负载端和输出电容端
那么这个是下一个情况
或者下一个周期的开始
这个时候下管开始关断
上管开始导通
图上显示的是
工作在 DCM 断续模式下的 buck
各个点的工作波形
从上往下我们可以看到
上管的驱动,下管的驱动
SW 端的电流波形
续流二极管的电流波形
包括 SW 端的电压,输出电压
和电感电流的波形
那么跟 CCM 相比
最大的区别就是电感电流会恢复到零
duty cycle = Ton / (Ton + Toff + Tdead)
在第一个工作模态
我们可以看到上管导通
能量从输入端
通过上管开始,流经电感
电感电流以一个固定的斜率往上升
那么下一个工作模态上管关断
下管开始导通
那么这个时候能量就从电感开始
往输出电容和负载转移
电感电流以一个固定的斜率往下降
在这个工作模态
电感电流会一直放到零
那么放到零之后
就进入到一个固定的间隔时间
或者说是死区时间
我们可以看到在这个间隔内
电感电流会恢复到零
这个时候上管下管都是关断的
duty cycle = Ton / (Ton + Toff + Tdead)
buck 电路的设计
输出 LC 的设计非常重要
通常我们根据所需要的输出指标
来选择相应的电感和电容的值
那么电感的值呢
通常先设定我们需要的
输出电流纹波 △I
通常选择10%到30%
选定电流纹波之后
根据相应的公式
根据输入和输出的电压
和期望的占空比
以及相应的开关频率
来计算所希望的电感值
那么电容的选择
主要的取决于输出纹波电压的选择
通常纹波电压就等于
输出电容的 ESR 乘以输出电感的电流纹波 △I
输出电容的选择非常重要
输出电容的选择决定了
输出纹波动态的特性
那么通常用的输入电容有以下几种
陶瓷电容,铝电解电容
铝 polymer 电容和钽 polymer 电容
每一种电容有相应的特性,价格
那么我们在设计的时候
要按照所需要的指标
包括成本的考虑
来选择不同的电容种类
常用的 buck 的输出电感有以下几种
工字电感,一体成型电感
和绕组成型电感
功率铁粉芯
那么不同的电感有不同的应用场合
价格也不一样
通常像工字电感会用在比较廉价的场合
或者是对成本要求比较高的场合
当然相应的它的 DCR 啊
power loss 会比较高一些
那么功率铁粉芯
相应的它的 power loss 会比较低
DCR 也非常小
但是呢电感值一般做的不会太大
通常是用在 VRM 低压大电流的场合
根据实际的需要
我们要按不同的指标
来选择不同的电感类型
图上显示的是主功率回路的小信号模型
根据这个小信号模型
我们可以得到主功率的传递函数
然后画出它的对应的波特图
我们可以看到对应的相频图和幅频图
通常的 DC buck 转折频率点
一般是在5k左右
对应的 ESR 的零点会在21k
ESL 对应的零点会在240k左右
输入滤波器的设计
对于动态指标的影响也非常大
通常我们需要按照动态负载的 slew rate
来选择输出电感值
按照上冲或者是下冲 △V 的幅度
来选择对应的输出电容的容量
那么按照图上的公式
我们可以近似地计算出
所需要的电感的值和电容的值
在 DC/DC buck 的设计当中
非常重要的一个指标
是控制器的最小导通时间
那么这个最小导通时间
来源于驱动的延时
反馈补偿回路的延时
和 PWM 比较器的延时
那么最小导通时间决定了
我们的控制器能够应用的
对应的输入输出和工作频率
通常在进行设计之前
我们需要核算控制器的最小导通时间
是否符合我们所做的 DC buck 的要求
以 TPS40170 为例
控制器的最小导通时间是100ns
那么在输入电压是60V
输出电压是5V和3.3V的时候
我们选定开关频率为600k
那么,按照公式
我们可以计算出最小导通时间
在5V的时候
最小导通时间是140ns
那么这个控制器是符合这个应用的
但是在3.3V的时候呢
这个最小导通时间需要的是91个ns
那么对于3.3V来说
40170 如果工作在600k的开关频率是不合适的
这个时候我们需要适当的降低开关频率
满足最小导通时间的要求
那么这个是固定频率的工作模式
和变频的工作模式一些简单的对比
定频的工作模式呢
不同的 DC buck
或者是多个 buck 可以
简单的同步
或者是做 interleave 交错并联
可以起到纹波对消的
减少在输出端的电容 ESR
和 PCB 上的损耗
那么 EMI 的峰值相应会比较高一些
同时受到最小导通时间
最小占空比的限制
变频的控制方式
那么变频的控制方式呢
它的补偿回路更容易调试
或者说是基本上不需要
或者说是基本上不需要
对补偿回路进行调试
EMI 的峰值会比较低
但是平均值一般会偏高
变频的工作方式呢
动态负载特性非常好
响应非常地快
回路补偿的器件非常的少
相比定频的工作模式
变频的回路补偿过程非常简单
手机看
扫码用手机观看
 视频简介
视频简介
定频降压型变换器的控制策略(上)
所属课程:定频降压型变换器的控制策略
发布时间:2015.10.28
视频集数:2
本节视频时长:00:09:35
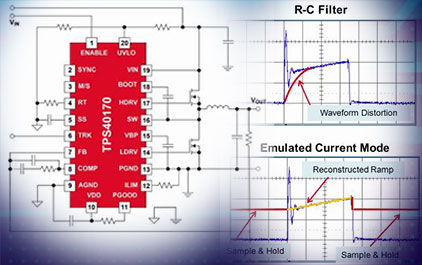
为了满足负载点应用的需要,选择用非隔离式降压转换器拓扑将配电电压减少到更低电平,这是一个比较易于实现的方法。降压拓扑比较简单,使用的组件相对较少,并且可针对多种应用进行配置。不过,选择用何种方法来控制转换器就不是那么的简单而直接了。在这个主题下,我们会仔细来看一看降压转换器的操作和基本设计注意事项。随后的讨论会检查2种定频控制策略间的优缺点,以及扩展两种策略功能的某些改进。讨论的定频控制策略包括自适应输入电压前馈的基本电压模式控制、电流模式控制和仿真电流模式控制。我们会讨论每项技术的亮点和难点,并且演示所选出的设计示例。在跟进的话题中,即“选择正确的可变频降压稳压器控制策略”,给出了恒定接通时间控制以及其变量。


 未学习 定频降压型变换器的控制策略(上)
未学习 定频降压型变换器的控制策略(上)
 未学习 定频降压型变换器的控制策略(下)
未学习 定频降压型变换器的控制策略(下)


