1. 1TI MMWave汽车传感器解决方案
Loading the player...
将在30s后自动为您播放下一课程
大家好,我是德州仪器的 技术工程师姚俊 今天呃,很高兴跟大家 在一起在网上相聚 我今天会给大家介绍一下 TI的毫米波雷达技术 在汽车领域的一些最新的情况 下面开始介绍具体的内容 首先给大家介绍一下TI的 毫米波雷达技术 一个发展的历史的发展的情况 TI是从大约是从十年前开始进行 77G毫米波雷达技术的研发 那么在TI进入这个领域之前 传统的毫米波雷达技术的 框图是左边的 这样的一个形式, 那么,我们可以看到 一个传统的毫米,一个 传统的雷达系统一般会包含两部分 一部分是射频的发射接收单元 另一部分是后面的数字信号处理单元 这两部分在传统的雷达上使用 两块不同的 pcb 板来实现的 那么TI的毫米波雷达技术从刚开始 我们就采用了一个单芯片的 这样的一个解决方案 也就是说我们将整个 射频的发射接收 ADC 的数据采集后端的 信号处理的 DSP 和 MCU 这些所有的功能都 集成了一个单芯片当中 那么可以实现这么高的集成度呢, 是因为 TI采用了叫 RFCmos 的工艺 那么传统的 CMOS 工艺呢 一般只能实现低频的数字电路 像我们通常所 使用的 MCU 或者是 DSP CMOS工艺呢, 很难实现一个高频的射频 实现高频的这个信号处理 TI我们大概是在十年前在 在TI内部 KLB实验室当中 我们开始研究将CMOS 工艺 用在 100 g 赫兹左右频段的这个高频 高频信号的发射和接收当中 那么在大概从十年前 到现在我们经历了四代的测试芯片 通过这四代的测试芯片 解决了CMOS工艺 在77G上所使用的一些技术问题 那么,最终呢我们是在, 最终呢我们是在 2016年 正式推出了TI的,基于 CMOS工艺的毫米波雷达的 传感器 那么这个 基于CMOS工艺的集成芯片呢 和传统的分立器件的 集成芯片对比呢 存在一些相应的优势 那么首先 因为传统的方案 会采用分立的器件来组成 所以这个设计的成本会比较高 另外,因为在芯片和芯片之间 以及板子和板子之间 要传输高频的射频信号 所以说,导致整个系统的电路设计 会更加复杂 同时,也更加容易引入噪声 那么,我们采用了单芯片的集成方案 之后可以带来的优势是显而易见的 首先是我们的这个 产品的设计会更简单 产品的尺寸可以做得更小,另外呢 是因为我们采用了将数字, 数字单元和射频单元 集成在了同一个芯片当中, 那么,我们就可以 更加容易的利用数字单元 去实时地监控射频单元的 信号质量。当我发现在 某些信号出现异常了之后 我可以及时地产生 报警和进行错误恢复 给系统提高了 更加更好的安全性 另外呢,就是因为我们的 集成度更高 所以说芯片的功耗更高 整个产品呢,成本也会大大地下降 那么右边的这张图呢? 是我们在,基于CMOS 工艺往后继续进行了演进 我们的第一代芯片呢 我们的天线呢 还是需要在 pcb 板上进行集成的 那么在我们下一代也就是在 今年我们会推出一个 AOP 的方案 就是 Antenna on Package 也就是我们将77g 毫米波雷达 所用到的天线也集成到了芯片当中 那么,这样做的好处呢 有下面几个 首先是 我们的方案设计会更加简单 因为我们原来要在 pcb 板上去实现这个天线那么 这个77g高频天线的 设计和合成,难度较大, 对加工精度的要求也非常高 另外呢 因为我们要在这 pcb 板上 去传输77g的高频信号 所以说我们在 pcb 板的 第一层和第二层要采用 比较昂贵的高频的板材 那么,这些板材呢? 不仅是价格比较高 而且在加工起来呢, 也比较困难 那么,我们通过将天线 集成在了芯片上了之后呢 那么,我们就不需要在 天线上面去传输77g的信号 我们可以使用一块普通的. Fr4的板材就可以 实现一个雷达系统 那么这会使得我们整个雷达系统的 (听不清)成本呢大大下降 同时也帮客户呢 节省了 进行天线开发的 这样的一个难度 所以说我们 可以看到我们后面会介绍 TI的现在的77g毫米波雷达芯片 我们有不集成天线的普通版本 有集成芯片的AOP版本 那么客户呢?可以根据自己的 需要呢进行灵活的选择 第二页呢,就是我刚才介绍到了 我们其实77g毫米波雷达芯片的 一些主要的优势,那我这里也 不再重复地强调了 我可以再重复一点呢, 就是说我们的设计呢 它的灵活性是非常高的。 那么,我们后面还会介绍 我们既有不集成 MCU 的 射频处理的芯片 也有集成了 MCU 和 DSP 的 单芯片的解决方案 那么还可以支持呢 多芯片的 级联 以及我们刚才介绍 我们还有把天线也集成在 芯片上的AOP的版本 也就是说我们给广大的雷达 客户呢,提供了非常多的选择 客户呢,可以根据自己对产品的 性能要求和产品价格的要求 就选择适合自己的方案 那下面再给大家介绍一下 我们现在推出来的 四款汽车毫米波雷达芯片 那么首先呢,在刚开始呢 我给大家强调一点,那么 TI在毫米波雷达呢, 我们是分成两个产品系列的 我这里介绍的呢,是我们汽车的产品 系列的这个毫米波雷达这些产品 是以AWR 也就是automotive mmWave radar 这个AWR 字母为开始的缩写 我们还有另外一个就是 针对工业雷达的运用 那么,那一款系列呢, 包含77g 也包含60g频段 毫米波雷达,那这些产品呢, 它是以 IWR这个命名开始 回到这里。对于汽车上面来讲 我们的毫米波雷达呢?我们现在推出 四款产品分别是 AWR 1243,1443 1642 和 1843 那么,这四款产品呢,我们会 我下来给大家分别做一个介绍 那么首先是 AWR的 1243 是一个集成了 三个发射通道 四个接收通道 内部的频率合成单元以及后端的ADC 对外的CSI2的接口和 SPI 接口 一个射频前端的电路 在 1243 当中呢,我们没有 集成 DSP 和 MCU 也就是说。 1243 本身呢,是不具有 数字信号处理的能力的, 它需要外部接一个 MCU 或者 DSP 呢来组成雷达系统 那么 1243 呢有一个非常强大的功能 就是我们可以支持多芯片的级联 构成一个imaging 雷达 这样的一个方案, 我们可以支持两片 四片 或者更多的 1243 级联 那么多芯片级联的好处呢 我们后面会给大家介绍到 可以让雷达看得更远 也可以让 雷达看得更清晰。 那么第二款芯片呢, 是我们的 AWR 1443 芯片 那么对管对比 1443 和 1243 呢 我们可以发现在芯片内部 我们增加了一个r4f 的 MCU 那么刚才我们讲到呢 1243 需要配合一个外部的 MCU 才能工作 那么 1443上面呢,我们就把 这个 MCU 放到芯片里面 同时呢?我们还集成了一个 雷达的加速器 这个加速器呢 可以完成 常用的毫米波雷达的 算法比如像 fft 的算法 像 c (听不清)算法 同时在芯片,当中呢, 我们还继承了 576 k 的RAM 那么对比 1243和1443 我们就可以看出来, 1443 呢,因为集成了MCU 雷达加速器以及内存 它就是一个完整的单芯片的 雷达的解决方案 1443 呢 一般是适用于一些对雷达探测距离 要求不是很高的这些短距和 超短距雷达的一些应用场景 比如说 像接近度传感器 像障碍物检测的传感器 我们下面呢,会讲到 这些分别介绍到这些应用 第三款芯片呢,就是我们现在 关注度最高的一款是 AWR 的 1642。那么对比 1642 1443 我们可以看到 除了内部的 这个 MCU 之外呢,我们还集成了 一个TI的 c 674 X 这样一个DSP核 我们在1443中 集成的是一个雷达加速器 我们在 1642 当中呢 把它换成了这样的一个 DSP 核 DSP 核的好处呢 就是提供了 一个非常好的灵活非常高的这样的 可编程性 因为硬件加速器 当中所运行的算法呢 一般是比较通用的固定的算法 而客户呢 如果有一些自己特殊 ip 或者是一些特殊的算法呢, 我们可以通过编程 我们的 c 674 X的这个 DSP 上面呢 得到灵活的支持 同时呢,我们 1642 当中还 继承了 1. 5 兆的内存 以及汽车上面常用的 can fd 的和 can 的接口 那么,我们可以看出来呢, 1642 呢,是一个单芯片的性价比 非常高的这样的一个 雷达的解决方案 那么1642一般是运用在 车载的超远距的雷达 和短距的雷达这样的应用场景 那么后面呢,我们也会介绍到。 针对 1642 的一些特定的应用 第四款呢,是我们现在 推出来的就是 AWR的1843 这样的毫米波雷达的芯片 那么 1843 呢 可以看成是 1642 的 一个性能增强版。那么除了 1642 对应的这些单元之外呢 首先我们把这个发射的通道呢, 从 1642 的两个增加到了三个 内存呢,从 1642 的 1. 5 兆 增加到了两兆 另外呢?我们还把对应的雷达的 加速器也集成在芯片当中 那么,我们可以看出来呢 1843 的对比 1642 来说呢 不仅是我的发射通道增加了一个 同时呢 我后端的信号处理的能力呢, 也大大的提升 我们有了雷达的硬件加速器也有了 TI的 c 674 X的DSP核 我们可以将硬件加速器呢和 DSP核 并行起来进行使用 这样可以实现更加复杂的算法 那么刚才介绍的那个四款芯片呢 我们现在呢 前面的那三款芯片, 现在已经全部量产了 我们的12 14和16呢 已经完全量产了 我们的 1843 呢 现在是可以提供样片给客户 预计是在今年的三季度量产 那么也就是说可以看出来 我们的产品呢 现在市场上呢,非常成熟的 一个毫米波雷达的方案 那么客户使用TI的平台呢, 可以很快推出自己的产品 另外一点呢,就是因为我们 现在的是汽车产品的系列 所以说我们的这些芯片呢, 对安全等级的要求都是非常高的 我们的12,16和18呢 符合 ASIL-B 的这个安全等级的 这样的一个标准 那么1443呢 因为它主要做的是一些 (听不清) 应用比如说,像开车门告警 或者是这个障碍物检测呢 所以说呢 1443 没有支持 ASIL-B 下面呢,这张图当中,给大家画了 一些我们TI现在的硬件开发平台 那么左边这张图 相信大家会比较熟悉 就是我们现在的 AWR的 1243,1443,1642和1843 这个开发板 我们把它命名为 Boostpad 这样的开发板 那么,在这个开发板上面呢 除了我们的毫米波雷达的芯片 我们的板载天线之外 还有我们 还有集成了对应的这些电源 这样的一些模块。 以及各种板子的各种调试的接口 比如说你像板载的Gtech的接口啊 Can的接口啊 以及高速 数据传输的这样一个接口 那么客户呢,拿到我们的 开发板之后呢 就可以跑我们的TI的各种参考设计 那么后面会介绍到我们TI 呢 针对毫米波雷达的各种应用呢 我们提供了很多参考设计给大家 右边的第二张图呢 是我们的TI的EVM版再配合 后面的这块绿色的就是 我们叫做 dc 1000 的数据采集卡 去构成的一个雷达 数据采集的平台 因为很多客户呢 在雷达的开发过程当中呢 需要去测试,我们毫米波雷达的射频的性能以及呢在做算法开发的时候 需要采集到雷达原始的这个 ADC 数据再结合自己的算法 去做性能的分析, 那么,在这个应用当中呢 我们就需要高速实时地去 采集我们雷达的这个 ADC 的数据 那么在我们的DCA 1000 板子 通过一个蓝色的高速的这个传输的 电缆将我们雷达的采集的 ADC 数据 实时地传递到我们的 dc 1000板子的上面 然后dc 1000板子呢 再把这个雷达的 数据呢再转换成这个以太网的接口 通过网线呢发给电脑上的上位机 那么这种数据的采集呢 是实时的进行的 那么客户呢, 拿到了我们的这个原始数据之后 保存的可以保存成一个原始的 数据文件去进行各种分析 那下面的第三块呢和 第四块的板子呢 都是我们的一些TI的一些第三方 合作伙伴所做的一些开发 我们的第三块呢, 是一块基于TI的 1243 加上TI 的TDA3X 它是一个高性能的 基于 ADAS的处理器平台 它做雷达可以完成的 雷达的后端的信号处理 那么第三块板子呢, 是我们的一个第三方合作伙伴 基于刚才讲到这两款芯片呢 开发了一个前项类的参考设计 那第四个板子呢,是基于我们的 AWR的 1642 去做的一个 非常小的尺寸是 34 乘以 38毫米的这样 带芯片的雷达的 这样的一个参考设计 前面呢,介绍到了 我们产品的一些性能 那么下面呢?我这里会结合 当前汽车雷达的一些常用的应用场景 给大家介绍一下我们的 毫米波雷达和这些应用场景呢 是怎么配合 其中呢,也会介绍 我们TI针对每一种应用场景 所推出来的一些参考设计 那么,我们现在将毫米波 雷达在汽车上的应用 大致可分成四个方向。 第一个方向呢是 第一个方向角雷达 角雷达呢就是我们现在常见的 把这个雷达的安装在 车辆的前后的四个角上的 一般它的典型的应用场景呢 像车载的盲区检测像变道辅助 那么,这些雷达呢,我们可以看到 在市场上现在可以看到非常多的 这样的一个产品有24g赫兹的 也有77g赫兹 因为角雷达呢 不涉及到车辆的主动控制 所以说呢 角雷达现在 市场上的产品呢 推出来的是非常多的。那么竞争 也非常激烈,那我们现在看到呢 角雷达的价格呢 在不断的下探 因此呢对于角雷达的应用场景 我们觉得产品的性价比 是现在最关键的一个指标 那么在这里呢 就会强调到我们 刚才介绍的TI的 1642 和 1843 的 是一个集成度非常高,同时性价价格呢, 也非常有优势的 一个单芯片的毫米波雷达解决方案 进行角雷达的开发呢 可以给客户呢 提供 非常多非常强 产品的竞争力 不仅是设计更简单而且 我们的整个产品的(听不清) 也会更加更加低。 那么 第二个方向呢就是 高性能的前向雷达 前向雷达,现在我们可以看到呢 现在主要的供应商呢, 还是国外的像 abcd 这样几家大的 这样的一个厂商 那么前向雷达呢 它要求探测雷达的探测距离 更远 角度 精度和角度分辨率呢更高 那么 同时呢 前向雷达 在实际使用的过程当中呢 往往需要和车辆的 主动控制系统比如说 像刹车这样的系统的配合起来 因此呢 前向雷达呢 对整个雷达的性能要求是非常高 那么 在这里呢就会 关联到我们在前面讲, 我TI的 1243, 可以支持多片级联 通过多片级联之后呢 我们可以让雷达看得更远 比如说我们通过四片级联可以 达到最远 350 米的这样一个探测距离 同时呢,也可以让雷达的 角度分辨率呢 做得更高 那么在四片级联底下呢, 我们会达到小于一度的这样的 角度的分辨率和角度的精度 那么 我们这里TI的 1243 多变级联方案 就非常适合于那些对性能要求 非常高的前向雷达的场景 第三款雷达呢,是和停车相关的雷达 停车呢,我们讲过的在 现在的停车的传感器当中呢 超声波是占主体的 那么后面呢, 我们也会给大家介绍 毫米波雷达相对于 超声波有很大的优势 我们很多的客户呢 现在正在研究 将毫米波雷达应用在停车系统当中 去取代超声波 那么第 4大块呢 是我们一些比较新的 把毫米波雷达呢 应用在车内的一些应用的情况 如说像驾驶员的心跳和 呼吸检测车内的成员检测 还有手势识别这样一些场景, 那么,我们下面呢, 都会给大家介绍到 上面的介绍呢,主要是针对我们刚才 前面讲到的这些应用场景以及TI 对应的一些参考设计, 给大家形象地展示一下我们的 毫米波雷达技术呢 是怎么应用在现在的汽车行业当中 那么,第一款参考设计呢, 是利用我们的 a w r的 1642 开发的一个叫短距雷达的 这样的一个参考设计 我们前面讲到过我们的 1642 是一个单芯片的集成方案 非常适合做车载的角雷达 那么,我们在这个参考设计当中呢 这个参考设计的名字是叫 TIDEP 0092 这是它编号 参考设计的名字就叫 short range radar 在这个参考设计当中呢 我们将 一个TI的 1642 的 这样的开发板放置在了 车子的这个前保险杠上 然后呢,在我们的高速公路上 去行驶 同时呢 我们在这个 1642 当中呢开发了一个完整的雷达 信号处理和目标跟踪 检测的这样的一个信号链 那么在这个配置当中呢 这个 SRRdemo参考这个设计当中呢 我们有支持有两种雷达的工作模式 第一种呢是80到 100 米的远距模式 第二种呢 是二十米的近距模式 在远距模式底下呢 我们的探测距离可以最远达到 120 米 我们的这个视角呢 这个 雷达的视角呢会窄一些 那么第二种呢,是在二十米的 近距模式底下我的雷达的探测 距离虽然很近, 但是我们的视角会更宽 同时呢,我的雷达的 分辨率会更高 那么左边的这两张图呢,就是分别 对应的刚才讲到的这两种参照模式呢 我们的测试结果, 我们可以看到上面这张图呢 就是在远距模式底下我们对车辆的 测试情况 最远呢可以测到 120 米的车辆 下面的这张图呢,是我们在 二十米近距模式底下我们可以看到的 在近距模式底下呢, 我们的雷达的分辨率可以做得很高 比如说我们可以看到这个高速公路 旁边的这样的一个围墙 我们可以看到前方的各个车辆的这样的一些形状 那么可以在雷达的车子前方 形成一个叫free room 也就是我们这个车辆呢 可以在行驶的这样的一个区间 我们这个参考设计的呢 所有的软件和硬件设计的资料呢 都可以在TI的网站上下载到 我这个今天的介绍到最后呢 会给大家提供一下这个下载的地址 第二个参考设计呢, 跟前面这个非常接近 但是呢,它是在我们的更新一代的 就是 a w r1843 上面开发的 我们把它定义 mid range radar 也就是一个中距雷达的应用场景 那么 1642 呢,主要的应用范围呢 是车载的角雷达。 那么 1843 呢 刚才介绍 因为它的功能更强 它多了一个发射 天线 同时信号处理能力 内存都更大,所以说 1843 呢 可以做150 m到200m探测范围之内的 一些中距离的雷达不光是包括角雷达 还可以做一些前向的雷达 那么在我们的这个测试呢, 参考设计当中 就是MRR这个参考设计当中呢 我们就把这个 1843 EVM板放在 放在车子的前方 然后基本的算法呢跟刚才讲过 1642 参考设计呢基本上比较类似 但是呢 它做了一些性能增强 那么,在前向的模式底下呢 我们可以看到最远 150 米的车辆 刚才讲过了 1642 是 120 米 那么在近距离的模式底下呢 因为我的雷达的分辨率更高了 我们可以检测出来就像我们这个 雷达在正对前方的一个停车场 有这个围栏以及后面的一些大的电缆 卷的时候呢 我们可以 看到一些完整的点云信息 同时呢, 1642 呢 因为多了一个发射天线 在我们的开发版当中呢我们把 一个发射天线呢布置在一个垂直的方向 所以说我不光可以去检测出来 雷达在水平方向的高角度 还可以检查出来雷达 在垂直方向的角度 我们可以形成一个 3d 也就是 垂直方向的这样的一个目标信息 就是在我刚才画的这个位置 第三个参考设计呢, 是关于我们停车领域的应用的 那么在停车领域呢 我们现在呢 有两个参考设计 分别针对 不同的应用。第一款呢 就是要针对于我们现在的叫做 自动停车系统那 我们在最近 看到很多关于无人驾驶 还有无人自动泊车的这样一个 应用场景 那么在停车的时候呢 如果是无人自动驾驶的停车呢, 在第一步呢我们要这个无人车 在停车场上面运动,在运动的时候呢 我们可以自主去找到当前可以停进去 这样的一个车位那么,这就是 TIDEP 01011 参考设计 所实现了一个场景, 我们将两个TI的雷达 分别装在了车子的左右两边那么 当车子在这个停车场运动的 这个轨迹运动的时候呢 我们可以检测出来车子 两边的这样一个轮廓和形状,那么在 这张图当中,我们可以看到 当你颜色比较深的这样的一些点 就是已经有车辆停进去的位置 那么,在另外一些比较空闲的 空白的这样的一些区域呢 就是当前可以停车的 这样的一个区域 那么,这个是针对于 未来的自动驾驶和自动停车 那么毫米波雷达呢 提供一个 非常高的这个实时成像的这个功能 第二个系统呢,就是说, 当我的这个车辆呢 找到了停车位之后呢我们希望 让车子呢能够自动的泊进去 那么现在在很多的车辆上面也有一个叫APA也叫自动泊车的一个系统 那么驾驶员只要按一个APA的 按键的车辆可以自动的泊进去 那么,现在的方案呢, 所使用的传感器主要是毫米波 主要是这个超声波方案, 那么是通过在车子的前后左右 布置十二个超声波的探头 行成一个APA 系统 超声波 相对于毫米波存在一些劣势 那么,首先, 因为超声波的视角比较窄 所以说呢,它很难覆盖大范围 那么在这张图当中 我们也看出来,尽管我的车子呢, 布置了十二个超声波探头 也还是没有办法对车辆 周边形成 360 度的环式覆盖 另外呢,超声波的探测 距离比较近。一般只能做到五米 同时呢,对于小于 十五米的目标呢 它存在检测盲区 这是因为 超声波这个探头的这个发播的 这个物理原理所导致 也就是说,当你的这个车辆呢, 靠得比较近的时候呢 小于十五厘米的 超声波的这个就会失效了 这会带来一些安全上的隐患 第三点呢,是因为我们的超声波呢 它没有办法去穿透 这个塑料件所以说呢 我们可以 看到在现在车子上面安装了 超声波探头的时候呢, 都需要在车辆的保险杠上面 进行打洞, 那这个对车辆的美观会造成影响 那毫米波雷达呢,就可以解决刚才我 所说的超声波这样的一些技术 那么首先,我们的毫米波雷达呢 我们的天线呢 可以进行分别 不同的设计可以形成一个 更加宽的FOV 那么 我只需要有六个到八个 毫米波雷达传感器呢 就可以对车辆进行一个 完整的 360 度的覆盖 第二个呢, 是我们的毫米波雷达的 因为我们现在的 每一个芯片的通道都非常多 我们可以使用一些通道呢 放在垂直方向上 那么,我就是不仅可以检测到这一个物体的水平的位置 还可以检测出来 它垂直的高度 那这个对于泊车来说 可以说是非常有帮助的 我第三点就是说 我们的这个毫米波雷达 因为我们的这个配置呢, 是非常灵活的 我们的多个天线之间 可以有一定的功能划分 也就是说 我用同样的这样的一个 雷达的硬件可以既支持到停车的 个应用场景 也可以支持到 其他的像盲点检测啊 这样,其他这个应用场景, 我们可以用一套硬件单元呢 实现了多种功能, 那这个是我们毫米波 这个是超声波所无法做到的 因为超声波呢,因为它的距离比较近,可能只能用在停车上面 第四个参考设计就是 我们前面刚才讲到的 我们有一个多片, 1243 级连在一起的 imagIng雷达的这样的一个应用场景 那这个通过将多片 1243级联连在一起之后呢 我们可以有形成一个 更多数量的一个天线的矩阵 比如说,在这里的这张图当中, 我们可以看到我们将四片 1243 放在了同一块板子上面 我们可以形成一个 十二根发射十六根接收的 12乘16的总共是 192 根 天线的这个虚拟阵列 那么天线数更多可以带来 很多的好处 首先是我们可以将多个发射天线的信号呢 在空间合成进行比波束赋形 我们可以将这样的好处呢,是可以 将发生在能量空间某个点集中起来 这样可以达到更远的探测距离 我们刚才讲过了在我们的四片1243 级联板子上面 最大的可以 实现了 350 米的探测距离 第二点呢,就是说因为我的 天线数通到更多了 那么,我们在使用10分或者码分的 这些Memo的应用场景当中 我的天线数通到更多 我可以 获得更高的分辨率 那么也就是说, 在雷达的这样一些近处呢 我们的这个雷达看到的物体 是更加清晰的
大家好,我是德州仪器的 技术工程师姚俊 今天呃,很高兴跟大家 在一起在网上相聚 我今天会给大家介绍一下 TI的毫米波雷达技术 在汽车领域的一些最新的情况 下面开始介绍具体的内容 首先给大家介绍一下TI的 毫米波雷达技术 一个发展的历史的发展的情况 TI是从大约是从十年前开始进行 77G毫米波雷达技术的研发 那么在TI进入这个领域之前 传统的毫米波雷达技术的 框图是左边的 这样的一个形式, 那么,我们可以看到 一个传统的毫米,一个 传统的雷达系统一般会包含两部分 一部分是射频的发射接收单元 另一部分是后面的数字信号处理单元 这两部分在传统的雷达上使用 两块不同的 pcb 板来实现的 那么TI的毫米波雷达技术从刚开始 我们就采用了一个单芯片的 这样的一个解决方案 也就是说我们将整个 射频的发射接收 ADC 的数据采集后端的 信号处理的 DSP 和 MCU 这些所有的功能都 集成了一个单芯片当中 那么可以实现这么高的集成度呢, 是因为 TI采用了叫 RFCmos 的工艺 那么传统的 CMOS 工艺呢 一般只能实现低频的数字电路 像我们通常所 使用的 MCU 或者是 DSP CMOS工艺呢, 很难实现一个高频的射频 实现高频的这个信号处理 TI我们大概是在十年前在 在TI内部 KLB实验室当中 我们开始研究将CMOS 工艺 用在 100 g 赫兹左右频段的这个高频 高频信号的发射和接收当中 那么在大概从十年前 到现在我们经历了四代的测试芯片 通过这四代的测试芯片 解决了CMOS工艺 在77G上所使用的一些技术问题 那么,最终呢我们是在, 最终呢我们是在 2016年 正式推出了TI的,基于 CMOS工艺的毫米波雷达的 传感器 那么这个 基于CMOS工艺的集成芯片呢 和传统的分立器件的 集成芯片对比呢 存在一些相应的优势 那么首先 因为传统的方案 会采用分立的器件来组成 所以这个设计的成本会比较高 另外,因为在芯片和芯片之间 以及板子和板子之间 要传输高频的射频信号 所以说,导致整个系统的电路设计 会更加复杂 同时,也更加容易引入噪声 那么,我们采用了单芯片的集成方案 之后可以带来的优势是显而易见的 首先是我们的这个 产品的设计会更简单 产品的尺寸可以做得更小,另外呢 是因为我们采用了将数字, 数字单元和射频单元 集成在了同一个芯片当中, 那么,我们就可以 更加容易的利用数字单元 去实时地监控射频单元的 信号质量。当我发现在 某些信号出现异常了之后 我可以及时地产生 报警和进行错误恢复 给系统提高了 更加更好的安全性 另外呢,就是因为我们的 集成度更高 所以说芯片的功耗更高 整个产品呢,成本也会大大地下降 那么右边的这张图呢? 是我们在,基于CMOS 工艺往后继续进行了演进 我们的第一代芯片呢 我们的天线呢 还是需要在 pcb 板上进行集成的 那么在我们下一代也就是在 今年我们会推出一个 AOP 的方案 就是 Antenna on Package 也就是我们将77g 毫米波雷达 所用到的天线也集成到了芯片当中 那么,这样做的好处呢 有下面几个 首先是 我们的方案设计会更加简单 因为我们原来要在 pcb 板上去实现这个天线那么 这个77g高频天线的 设计和合成,难度较大, 对加工精度的要求也非常高 另外呢 因为我们要在这 pcb 板上 去传输77g的高频信号 所以说我们在 pcb 板的 第一层和第二层要采用 比较昂贵的高频的板材 那么,这些板材呢? 不仅是价格比较高 而且在加工起来呢, 也比较困难 那么,我们通过将天线 集成在了芯片上了之后呢 那么,我们就不需要在 天线上面去传输77g的信号 我们可以使用一块普通的. Fr4的板材就可以 实现一个雷达系统 那么这会使得我们整个雷达系统的 (听不清)成本呢大大下降 同时也帮客户呢 节省了 进行天线开发的 这样的一个难度 所以说我们 可以看到我们后面会介绍 TI的现在的77g毫米波雷达芯片 我们有不集成天线的普通版本 有集成芯片的AOP版本 那么客户呢?可以根据自己的 需要呢进行灵活的选择 第二页呢,就是我刚才介绍到了 我们其实77g毫米波雷达芯片的 一些主要的优势,那我这里也 不再重复地强调了 我可以再重复一点呢, 就是说我们的设计呢 它的灵活性是非常高的。 那么,我们后面还会介绍 我们既有不集成 MCU 的 射频处理的芯片 也有集成了 MCU 和 DSP 的 单芯片的解决方案 那么还可以支持呢 多芯片的 级联 以及我们刚才介绍 我们还有把天线也集成在 芯片上的AOP的版本 也就是说我们给广大的雷达 客户呢,提供了非常多的选择 客户呢,可以根据自己对产品的 性能要求和产品价格的要求 就选择适合自己的方案 那下面再给大家介绍一下 我们现在推出来的 四款汽车毫米波雷达芯片 那么首先呢,在刚开始呢 我给大家强调一点,那么 TI在毫米波雷达呢, 我们是分成两个产品系列的 我这里介绍的呢,是我们汽车的产品 系列的这个毫米波雷达这些产品 是以AWR 也就是automotive mmWave radar 这个AWR 字母为开始的缩写 我们还有另外一个就是 针对工业雷达的运用 那么,那一款系列呢, 包含77g 也包含60g频段 毫米波雷达,那这些产品呢, 它是以 IWR这个命名开始 回到这里。对于汽车上面来讲 我们的毫米波雷达呢?我们现在推出 四款产品分别是 AWR 1243,1443 1642 和 1843 那么,这四款产品呢,我们会 我下来给大家分别做一个介绍 那么首先是 AWR的 1243 是一个集成了 三个发射通道 四个接收通道 内部的频率合成单元以及后端的ADC 对外的CSI2的接口和 SPI 接口 一个射频前端的电路 在 1243 当中呢,我们没有 集成 DSP 和 MCU 也就是说。 1243 本身呢,是不具有 数字信号处理的能力的, 它需要外部接一个 MCU 或者 DSP 呢来组成雷达系统 那么 1243 呢有一个非常强大的功能 就是我们可以支持多芯片的级联 构成一个imaging 雷达 这样的一个方案, 我们可以支持两片 四片 或者更多的 1243 级联 那么多芯片级联的好处呢 我们后面会给大家介绍到 可以让雷达看得更远 也可以让 雷达看得更清晰。 那么第二款芯片呢, 是我们的 AWR 1443 芯片 那么对管对比 1443 和 1243 呢 我们可以发现在芯片内部 我们增加了一个r4f 的 MCU 那么刚才我们讲到呢 1243 需要配合一个外部的 MCU 才能工作 那么 1443上面呢,我们就把 这个 MCU 放到芯片里面 同时呢?我们还集成了一个 雷达的加速器 这个加速器呢 可以完成 常用的毫米波雷达的 算法比如像 fft 的算法 像 c (听不清)算法 同时在芯片,当中呢, 我们还继承了 576 k 的RAM 那么对比 1243和1443 我们就可以看出来, 1443 呢,因为集成了MCU 雷达加速器以及内存 它就是一个完整的单芯片的 雷达的解决方案 1443 呢 一般是适用于一些对雷达探测距离 要求不是很高的这些短距和 超短距雷达的一些应用场景 比如说 像接近度传感器 像障碍物检测的传感器 我们下面呢,会讲到 这些分别介绍到这些应用 第三款芯片呢,就是我们现在 关注度最高的一款是 AWR 的 1642。那么对比 1642 1443 我们可以看到 除了内部的 这个 MCU 之外呢,我们还集成了 一个TI的 c 674 X 这样一个DSP核 我们在1443中 集成的是一个雷达加速器 我们在 1642 当中呢 把它换成了这样的一个 DSP 核 DSP 核的好处呢 就是提供了 一个非常好的灵活非常高的这样的 可编程性 因为硬件加速器 当中所运行的算法呢 一般是比较通用的固定的算法 而客户呢 如果有一些自己特殊 ip 或者是一些特殊的算法呢, 我们可以通过编程 我们的 c 674 X的这个 DSP 上面呢 得到灵活的支持 同时呢,我们 1642 当中还 继承了 1. 5 兆的内存 以及汽车上面常用的 can fd 的和 can 的接口 那么,我们可以看出来呢, 1642 呢,是一个单芯片的性价比 非常高的这样的一个 雷达的解决方案 那么1642一般是运用在 车载的超远距的雷达 和短距的雷达这样的应用场景 那么后面呢,我们也会介绍到。 针对 1642 的一些特定的应用 第四款呢,是我们现在 推出来的就是 AWR的1843 这样的毫米波雷达的芯片 那么 1843 呢 可以看成是 1642 的 一个性能增强版。那么除了 1642 对应的这些单元之外呢 首先我们把这个发射的通道呢, 从 1642 的两个增加到了三个 内存呢,从 1642 的 1. 5 兆 增加到了两兆 另外呢?我们还把对应的雷达的 加速器也集成在芯片当中 那么,我们可以看出来呢 1843 的对比 1642 来说呢 不仅是我的发射通道增加了一个 同时呢 我后端的信号处理的能力呢, 也大大的提升 我们有了雷达的硬件加速器也有了 TI的 c 674 X的DSP核 我们可以将硬件加速器呢和 DSP核 并行起来进行使用 这样可以实现更加复杂的算法 那么刚才介绍的那个四款芯片呢 我们现在呢 前面的那三款芯片, 现在已经全部量产了 我们的12 14和16呢 已经完全量产了 我们的 1843 呢 现在是可以提供样片给客户 预计是在今年的三季度量产 那么也就是说可以看出来 我们的产品呢 现在市场上呢,非常成熟的 一个毫米波雷达的方案 那么客户使用TI的平台呢, 可以很快推出自己的产品 另外一点呢,就是因为我们 现在的是汽车产品的系列 所以说我们的这些芯片呢, 对安全等级的要求都是非常高的 我们的12,16和18呢 符合 ASIL-B 的这个安全等级的 这样的一个标准 那么1443呢 因为它主要做的是一些 (听不清) 应用比如说,像开车门告警 或者是这个障碍物检测呢 所以说呢 1443 没有支持 ASIL-B 下面呢,这张图当中,给大家画了 一些我们TI现在的硬件开发平台 那么左边这张图 相信大家会比较熟悉 就是我们现在的 AWR的 1243,1443,1642和1843 这个开发板 我们把它命名为 Boostpad 这样的开发板 那么,在这个开发板上面呢 除了我们的毫米波雷达的芯片 我们的板载天线之外 还有我们 还有集成了对应的这些电源 这样的一些模块。 以及各种板子的各种调试的接口 比如说你像板载的Gtech的接口啊 Can的接口啊 以及高速 数据传输的这样一个接口 那么客户呢,拿到我们的 开发板之后呢 就可以跑我们的TI的各种参考设计 那么后面会介绍到我们TI 呢 针对毫米波雷达的各种应用呢 我们提供了很多参考设计给大家 右边的第二张图呢 是我们的TI的EVM版再配合 后面的这块绿色的就是 我们叫做 dc 1000 的数据采集卡 去构成的一个雷达 数据采集的平台 因为很多客户呢 在雷达的开发过程当中呢 需要去测试,我们毫米波雷达的射频的性能以及呢在做算法开发的时候 需要采集到雷达原始的这个 ADC 数据再结合自己的算法 去做性能的分析, 那么,在这个应用当中呢 我们就需要高速实时地去 采集我们雷达的这个 ADC 的数据 那么在我们的DCA 1000 板子 通过一个蓝色的高速的这个传输的 电缆将我们雷达的采集的 ADC 数据 实时地传递到我们的 dc 1000板子的上面 然后dc 1000板子呢 再把这个雷达的 数据呢再转换成这个以太网的接口 通过网线呢发给电脑上的上位机 那么这种数据的采集呢 是实时的进行的 那么客户呢, 拿到了我们的这个原始数据之后 保存的可以保存成一个原始的 数据文件去进行各种分析 那下面的第三块呢和 第四块的板子呢 都是我们的一些TI的一些第三方 合作伙伴所做的一些开发 我们的第三块呢, 是一块基于TI的 1243 加上TI 的TDA3X 它是一个高性能的 基于 ADAS的处理器平台 它做雷达可以完成的 雷达的后端的信号处理 那么第三块板子呢, 是我们的一个第三方合作伙伴 基于刚才讲到这两款芯片呢 开发了一个前项类的参考设计 那第四个板子呢,是基于我们的 AWR的 1642 去做的一个 非常小的尺寸是 34 乘以 38毫米的这样 带芯片的雷达的 这样的一个参考设计 前面呢,介绍到了 我们产品的一些性能 那么下面呢?我这里会结合 当前汽车雷达的一些常用的应用场景 给大家介绍一下我们的 毫米波雷达和这些应用场景呢 是怎么配合 其中呢,也会介绍 我们TI针对每一种应用场景 所推出来的一些参考设计 那么,我们现在将毫米波 雷达在汽车上的应用 大致可分成四个方向。 第一个方向呢是 第一个方向角雷达 角雷达呢就是我们现在常见的 把这个雷达的安装在 车辆的前后的四个角上的 一般它的典型的应用场景呢 像车载的盲区检测像变道辅助 那么,这些雷达呢,我们可以看到 在市场上现在可以看到非常多的 这样的一个产品有24g赫兹的 也有77g赫兹 因为角雷达呢 不涉及到车辆的主动控制 所以说呢 角雷达现在 市场上的产品呢 推出来的是非常多的。那么竞争 也非常激烈,那我们现在看到呢 角雷达的价格呢 在不断的下探 因此呢对于角雷达的应用场景 我们觉得产品的性价比 是现在最关键的一个指标 那么在这里呢 就会强调到我们 刚才介绍的TI的 1642 和 1843 的 是一个集成度非常高,同时性价价格呢, 也非常有优势的 一个单芯片的毫米波雷达解决方案 进行角雷达的开发呢 可以给客户呢 提供 非常多非常强 产品的竞争力 不仅是设计更简单而且 我们的整个产品的(听不清) 也会更加更加低。 那么 第二个方向呢就是 高性能的前向雷达 前向雷达,现在我们可以看到呢 现在主要的供应商呢, 还是国外的像 abcd 这样几家大的 这样的一个厂商 那么前向雷达呢 它要求探测雷达的探测距离 更远 角度 精度和角度分辨率呢更高 那么 同时呢 前向雷达 在实际使用的过程当中呢 往往需要和车辆的 主动控制系统比如说 像刹车这样的系统的配合起来 因此呢 前向雷达呢 对整个雷达的性能要求是非常高 那么 在这里呢就会 关联到我们在前面讲, 我TI的 1243, 可以支持多片级联 通过多片级联之后呢 我们可以让雷达看得更远 比如说我们通过四片级联可以 达到最远 350 米的这样一个探测距离 同时呢,也可以让雷达的 角度分辨率呢 做得更高 那么在四片级联底下呢, 我们会达到小于一度的这样的 角度的分辨率和角度的精度 那么 我们这里TI的 1243 多变级联方案 就非常适合于那些对性能要求 非常高的前向雷达的场景 第三款雷达呢,是和停车相关的雷达 停车呢,我们讲过的在 现在的停车的传感器当中呢 超声波是占主体的 那么后面呢, 我们也会给大家介绍 毫米波雷达相对于 超声波有很大的优势 我们很多的客户呢 现在正在研究 将毫米波雷达应用在停车系统当中 去取代超声波 那么第 4大块呢 是我们一些比较新的 把毫米波雷达呢 应用在车内的一些应用的情况 如说像驾驶员的心跳和 呼吸检测车内的成员检测 还有手势识别这样一些场景, 那么,我们下面呢, 都会给大家介绍到 上面的介绍呢,主要是针对我们刚才 前面讲到的这些应用场景以及TI 对应的一些参考设计, 给大家形象地展示一下我们的 毫米波雷达技术呢 是怎么应用在现在的汽车行业当中 那么,第一款参考设计呢, 是利用我们的 a w r的 1642 开发的一个叫短距雷达的 这样的一个参考设计 我们前面讲到过我们的 1642 是一个单芯片的集成方案 非常适合做车载的角雷达 那么,我们在这个参考设计当中呢 这个参考设计的名字是叫 TIDEP 0092 这是它编号 参考设计的名字就叫 short range radar 在这个参考设计当中呢 我们将 一个TI的 1642 的 这样的开发板放置在了 车子的这个前保险杠上 然后呢,在我们的高速公路上 去行驶 同时呢 我们在这个 1642 当中呢开发了一个完整的雷达 信号处理和目标跟踪 检测的这样的一个信号链 那么在这个配置当中呢 这个 SRRdemo参考这个设计当中呢 我们有支持有两种雷达的工作模式 第一种呢是80到 100 米的远距模式 第二种呢 是二十米的近距模式 在远距模式底下呢 我们的探测距离可以最远达到 120 米 我们的这个视角呢 这个 雷达的视角呢会窄一些 那么第二种呢,是在二十米的 近距模式底下我的雷达的探测 距离虽然很近, 但是我们的视角会更宽 同时呢,我的雷达的 分辨率会更高 那么左边的这两张图呢,就是分别 对应的刚才讲到的这两种参照模式呢 我们的测试结果, 我们可以看到上面这张图呢 就是在远距模式底下我们对车辆的 测试情况 最远呢可以测到 120 米的车辆 下面的这张图呢,是我们在 二十米近距模式底下我们可以看到的 在近距模式底下呢, 我们的雷达的分辨率可以做得很高 比如说我们可以看到这个高速公路 旁边的这样的一个围墙 我们可以看到前方的各个车辆的这样的一些形状 那么可以在雷达的车子前方 形成一个叫free room 也就是我们这个车辆呢 可以在行驶的这样的一个区间 我们这个参考设计的呢 所有的软件和硬件设计的资料呢 都可以在TI的网站上下载到 我这个今天的介绍到最后呢 会给大家提供一下这个下载的地址 第二个参考设计呢, 跟前面这个非常接近 但是呢,它是在我们的更新一代的 就是 a w r1843 上面开发的 我们把它定义 mid range radar 也就是一个中距雷达的应用场景 那么 1642 呢,主要的应用范围呢 是车载的角雷达。 那么 1843 呢 刚才介绍 因为它的功能更强 它多了一个发射 天线 同时信号处理能力 内存都更大,所以说 1843 呢 可以做150 m到200m探测范围之内的 一些中距离的雷达不光是包括角雷达 还可以做一些前向的雷达 那么在我们的这个测试呢, 参考设计当中 就是MRR这个参考设计当中呢 我们就把这个 1843 EVM板放在 放在车子的前方 然后基本的算法呢跟刚才讲过 1642 参考设计呢基本上比较类似 但是呢 它做了一些性能增强 那么,在前向的模式底下呢 我们可以看到最远 150 米的车辆 刚才讲过了 1642 是 120 米 那么在近距离的模式底下呢 因为我的雷达的分辨率更高了 我们可以检测出来就像我们这个 雷达在正对前方的一个停车场 有这个围栏以及后面的一些大的电缆 卷的时候呢 我们可以 看到一些完整的点云信息 同时呢, 1642 呢 因为多了一个发射天线 在我们的开发版当中呢我们把 一个发射天线呢布置在一个垂直的方向 所以说我不光可以去检测出来 雷达在水平方向的高角度 还可以检查出来雷达 在垂直方向的角度 我们可以形成一个 3d 也就是 垂直方向的这样的一个目标信息 就是在我刚才画的这个位置 第三个参考设计呢, 是关于我们停车领域的应用的 那么在停车领域呢 我们现在呢 有两个参考设计 分别针对 不同的应用。第一款呢 就是要针对于我们现在的叫做 自动停车系统那 我们在最近 看到很多关于无人驾驶 还有无人自动泊车的这样一个 应用场景 那么在停车的时候呢 如果是无人自动驾驶的停车呢, 在第一步呢我们要这个无人车 在停车场上面运动,在运动的时候呢 我们可以自主去找到当前可以停进去 这样的一个车位那么,这就是 TIDEP 01011 参考设计 所实现了一个场景, 我们将两个TI的雷达 分别装在了车子的左右两边那么 当车子在这个停车场运动的 这个轨迹运动的时候呢 我们可以检测出来车子 两边的这样一个轮廓和形状,那么在 这张图当中,我们可以看到 当你颜色比较深的这样的一些点 就是已经有车辆停进去的位置 那么,在另外一些比较空闲的 空白的这样的一些区域呢 就是当前可以停车的 这样的一个区域 那么,这个是针对于 未来的自动驾驶和自动停车 那么毫米波雷达呢 提供一个 非常高的这个实时成像的这个功能 第二个系统呢,就是说, 当我的这个车辆呢 找到了停车位之后呢我们希望 让车子呢能够自动的泊进去 那么现在在很多的车辆上面也有一个叫APA也叫自动泊车的一个系统 那么驾驶员只要按一个APA的 按键的车辆可以自动的泊进去 那么,现在的方案呢, 所使用的传感器主要是毫米波 主要是这个超声波方案, 那么是通过在车子的前后左右 布置十二个超声波的探头 行成一个APA 系统 超声波 相对于毫米波存在一些劣势 那么,首先, 因为超声波的视角比较窄 所以说呢,它很难覆盖大范围 那么在这张图当中 我们也看出来,尽管我的车子呢, 布置了十二个超声波探头 也还是没有办法对车辆 周边形成 360 度的环式覆盖 另外呢,超声波的探测 距离比较近。一般只能做到五米 同时呢,对于小于 十五米的目标呢 它存在检测盲区 这是因为 超声波这个探头的这个发播的 这个物理原理所导致 也就是说,当你的这个车辆呢, 靠得比较近的时候呢 小于十五厘米的 超声波的这个就会失效了 这会带来一些安全上的隐患 第三点呢,是因为我们的超声波呢 它没有办法去穿透 这个塑料件所以说呢 我们可以 看到在现在车子上面安装了 超声波探头的时候呢, 都需要在车辆的保险杠上面 进行打洞, 那这个对车辆的美观会造成影响 那毫米波雷达呢,就可以解决刚才我 所说的超声波这样的一些技术 那么首先,我们的毫米波雷达呢 我们的天线呢 可以进行分别 不同的设计可以形成一个 更加宽的FOV 那么 我只需要有六个到八个 毫米波雷达传感器呢 就可以对车辆进行一个 完整的 360 度的覆盖 第二个呢, 是我们的毫米波雷达的 因为我们现在的 每一个芯片的通道都非常多 我们可以使用一些通道呢 放在垂直方向上 那么,我就是不仅可以检测到这一个物体的水平的位置 还可以检测出来 它垂直的高度 那这个对于泊车来说 可以说是非常有帮助的 我第三点就是说 我们的这个毫米波雷达 因为我们的这个配置呢, 是非常灵活的 我们的多个天线之间 可以有一定的功能划分 也就是说 我用同样的这样的一个 雷达的硬件可以既支持到停车的 个应用场景 也可以支持到 其他的像盲点检测啊 这样,其他这个应用场景, 我们可以用一套硬件单元呢 实现了多种功能, 那这个是我们毫米波 这个是超声波所无法做到的 因为超声波呢,因为它的距离比较近,可能只能用在停车上面 第四个参考设计就是 我们前面刚才讲到的 我们有一个多片, 1243 级连在一起的 imagIng雷达的这样的一个应用场景 那这个通过将多片 1243级联连在一起之后呢 我们可以有形成一个 更多数量的一个天线的矩阵 比如说,在这里的这张图当中, 我们可以看到我们将四片 1243 放在了同一块板子上面 我们可以形成一个 十二根发射十六根接收的 12乘16的总共是 192 根 天线的这个虚拟阵列 那么天线数更多可以带来 很多的好处 首先是我们可以将多个发射天线的信号呢 在空间合成进行比波束赋形 我们可以将这样的好处呢,是可以 将发生在能量空间某个点集中起来 这样可以达到更远的探测距离 我们刚才讲过了在我们的四片1243 级联板子上面 最大的可以 实现了 350 米的探测距离 第二点呢,就是说因为我的 天线数通到更多了 那么,我们在使用10分或者码分的 这些Memo的应用场景当中 我的天线数通到更多 我可以 获得更高的分辨率 那么也就是说, 在雷达的这样一些近处呢 我们的这个雷达看到的物体 是更加清晰的
大家好,我是德州仪器的 技术工程师姚俊
今天呃,很高兴跟大家 在一起在网上相聚
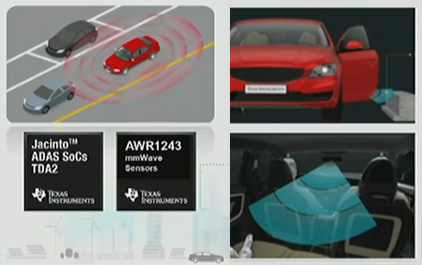
我今天会给大家介绍一下 TI的毫米波雷达技术
在汽车领域的一些最新的情况
下面开始介绍具体的内容
首先给大家介绍一下TI的 毫米波雷达技术
一个发展的历史的发展的情况
TI是从大约是从十年前开始进行 77G毫米波雷达技术的研发
那么在TI进入这个领域之前
传统的毫米波雷达技术的 框图是左边的
这样的一个形式, 那么,我们可以看到
一个传统的毫米,一个 传统的雷达系统一般会包含两部分
一部分是射频的发射接收单元
另一部分是后面的数字信号处理单元
这两部分在传统的雷达上使用 两块不同的 pcb 板来实现的
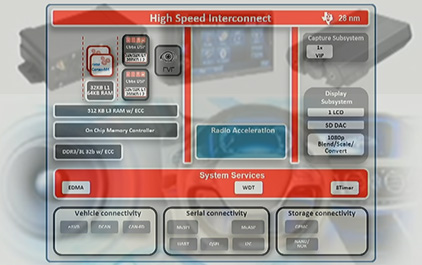
那么TI的毫米波雷达技术从刚开始
我们就采用了一个单芯片的 这样的一个解决方案
也就是说我们将整个 射频的发射接收
ADC 的数据采集后端的 信号处理的 DSP 和 MCU
这些所有的功能都 集成了一个单芯片当中
那么可以实现这么高的集成度呢, 是因为 TI采用了叫 RFCmos 的工艺
那么传统的 CMOS 工艺呢 一般只能实现低频的数字电路
像我们通常所 使用的 MCU 或者是 DSP
CMOS工艺呢, 很难实现一个高频的射频
实现高频的这个信号处理 TI我们大概是在十年前在
在TI内部 KLB实验室当中 我们开始研究将CMOS 工艺
用在 100 g 赫兹左右频段的这个高频
高频信号的发射和接收当中 那么在大概从十年前
到现在我们经历了四代的测试芯片
通过这四代的测试芯片 解决了CMOS工艺
在77G上所使用的一些技术问题
那么,最终呢我们是在, 最终呢我们是在 2016年
正式推出了TI的,基于 CMOS工艺的毫米波雷达的
传感器 那么这个
基于CMOS工艺的集成芯片呢 和传统的分立器件的
集成芯片对比呢 存在一些相应的优势 那么首先 因为传统的方案
会采用分立的器件来组成 所以这个设计的成本会比较高
另外,因为在芯片和芯片之间 以及板子和板子之间
要传输高频的射频信号 所以说,导致整个系统的电路设计
会更加复杂 同时,也更加容易引入噪声
那么,我们采用了单芯片的集成方案 之后可以带来的优势是显而易见的
首先是我们的这个 产品的设计会更简单
产品的尺寸可以做得更小,另外呢
是因为我们采用了将数字, 数字单元和射频单元
集成在了同一个芯片当中, 那么,我们就可以
更加容易的利用数字单元 去实时地监控射频单元的
信号质量。当我发现在 某些信号出现异常了之后
我可以及时地产生 报警和进行错误恢复
给系统提高了 更加更好的安全性
另外呢,就是因为我们的 集成度更高 所以说芯片的功耗更高
整个产品呢,成本也会大大地下降 那么右边的这张图呢?
是我们在,基于CMOS 工艺往后继续进行了演进
我们的第一代芯片呢 我们的天线呢
还是需要在 pcb 板上进行集成的
那么在我们下一代也就是在 今年我们会推出一个
AOP 的方案 就是 Antenna on Package 也就是我们将77g 毫米波雷达
所用到的天线也集成到了芯片当中
那么,这样做的好处呢 有下面几个 首先是
我们的方案设计会更加简单 因为我们原来要在
pcb 板上去实现这个天线那么 这个77g高频天线的
设计和合成,难度较大, 对加工精度的要求也非常高
另外呢 因为我们要在这 pcb 板上 去传输77g的高频信号
所以说我们在 pcb 板的 第一层和第二层要采用
比较昂贵的高频的板材
那么,这些板材呢? 不仅是价格比较高
而且在加工起来呢, 也比较困难
那么,我们通过将天线 集成在了芯片上了之后呢
那么,我们就不需要在 天线上面去传输77g的信号
我们可以使用一块普通的. Fr4的板材就可以
实现一个雷达系统
那么这会使得我们整个雷达系统的 (听不清)成本呢大大下降
同时也帮客户呢 节省了 进行天线开发的
这样的一个难度 所以说我们 可以看到我们后面会介绍
TI的现在的77g毫米波雷达芯片 我们有不集成天线的普通版本
有集成芯片的AOP版本
那么客户呢?可以根据自己的 需要呢进行灵活的选择
第二页呢,就是我刚才介绍到了 我们其实77g毫米波雷达芯片的
一些主要的优势,那我这里也 不再重复地强调了
我可以再重复一点呢, 就是说我们的设计呢
它的灵活性是非常高的。 那么,我们后面还会介绍
我们既有不集成 MCU 的 射频处理的芯片
也有集成了 MCU 和 DSP 的 单芯片的解决方案
那么还可以支持呢 多芯片的 级联 以及我们刚才介绍
我们还有把天线也集成在 芯片上的AOP的版本
也就是说我们给广大的雷达 客户呢,提供了非常多的选择
客户呢,可以根据自己对产品的 性能要求和产品价格的要求
就选择适合自己的方案 那下面再给大家介绍一下
我们现在推出来的 四款汽车毫米波雷达芯片
那么首先呢,在刚开始呢 我给大家强调一点,那么
TI在毫米波雷达呢, 我们是分成两个产品系列的
我这里介绍的呢,是我们汽车的产品 系列的这个毫米波雷达这些产品
是以AWR 也就是automotive mmWave radar 这个AWR 字母为开始的缩写
我们还有另外一个就是 针对工业雷达的运用
那么,那一款系列呢, 包含77g 也包含60g频段
毫米波雷达,那这些产品呢, 它是以 IWR这个命名开始
回到这里。对于汽车上面来讲
我们的毫米波雷达呢?我们现在推出 四款产品分别是 AWR 1243,1443
1642 和 1843
那么,这四款产品呢,我们会 我下来给大家分别做一个介绍
那么首先是 AWR的 1243 是一个集成了
三个发射通道 四个接收通道 内部的频率合成单元以及后端的ADC
对外的CSI2的接口和 SPI 接口 一个射频前端的电路
在 1243 当中呢,我们没有 集成 DSP 和 MCU
也就是说。 1243 本身呢,是不具有 数字信号处理的能力的,
它需要外部接一个 MCU 或者 DSP 呢来组成雷达系统
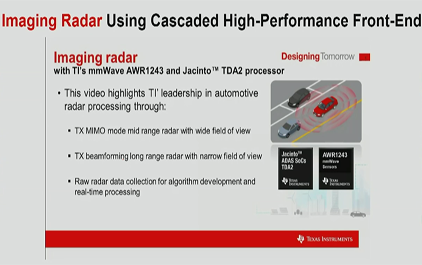
那么 1243 呢有一个非常强大的功能
就是我们可以支持多芯片的级联 构成一个imaging 雷达
这样的一个方案, 我们可以支持两片 四片
或者更多的 1243 级联 那么多芯片级联的好处呢
我们后面会给大家介绍到 可以让雷达看得更远 也可以让
雷达看得更清晰。 那么第二款芯片呢,
是我们的 AWR 1443 芯片
那么对管对比 1443 和 1243 呢 我们可以发现在芯片内部
我们增加了一个r4f 的 MCU 那么刚才我们讲到呢
1243 需要配合一个外部的 MCU 才能工作
那么 1443上面呢,我们就把 这个 MCU 放到芯片里面
同时呢?我们还集成了一个 雷达的加速器 这个加速器呢
可以完成 常用的毫米波雷达的 算法比如像 fft 的算法
像 c (听不清)算法
同时在芯片,当中呢, 我们还继承了 576 k 的RAM
那么对比 1243和1443
我们就可以看出来, 1443 呢,因为集成了MCU
雷达加速器以及内存 它就是一个完整的单芯片的
雷达的解决方案 1443 呢 一般是适用于一些对雷达探测距离
要求不是很高的这些短距和 超短距雷达的一些应用场景
比如说 像接近度传感器 像障碍物检测的传感器
我们下面呢,会讲到 这些分别介绍到这些应用
第三款芯片呢,就是我们现在 关注度最高的一款是
AWR 的 1642。那么对比 1642 1443 我们可以看到 除了内部的
这个 MCU 之外呢,我们还集成了 一个TI的 c 674 X
这样一个DSP核 我们在1443中
集成的是一个雷达加速器 我们在 1642 当中呢
把它换成了这样的一个 DSP 核
DSP 核的好处呢 就是提供了 一个非常好的灵活非常高的这样的
可编程性 因为硬件加速器 当中所运行的算法呢
一般是比较通用的固定的算法 而客户呢 如果有一些自己特殊
ip 或者是一些特殊的算法呢, 我们可以通过编程
我们的 c 674 X的这个 DSP 上面呢 得到灵活的支持
同时呢,我们 1642 当中还 继承了 1. 5 兆的内存
以及汽车上面常用的 can fd 的和 can 的接口
那么,我们可以看出来呢, 1642 呢,是一个单芯片的性价比
非常高的这样的一个 雷达的解决方案
那么1642一般是运用在 车载的超远距的雷达
和短距的雷达这样的应用场景
那么后面呢,我们也会介绍到。 针对 1642 的一些特定的应用
第四款呢,是我们现在 推出来的就是 AWR的1843
这样的毫米波雷达的芯片 那么 1843 呢 可以看成是 1642 的
一个性能增强版。那么除了 1642 对应的这些单元之外呢
首先我们把这个发射的通道呢, 从 1642 的两个增加到了三个
内存呢,从 1642 的 1. 5 兆 增加到了两兆
另外呢?我们还把对应的雷达的 加速器也集成在芯片当中
那么,我们可以看出来呢 1843 的对比 1642 来说呢
不仅是我的发射通道增加了一个
同时呢 我后端的信号处理的能力呢, 也大大的提升
我们有了雷达的硬件加速器也有了 TI的 c 674 X的DSP核
我们可以将硬件加速器呢和 DSP核 并行起来进行使用
这样可以实现更加复杂的算法
那么刚才介绍的那个四款芯片呢
我们现在呢 前面的那三款芯片, 现在已经全部量产了
我们的12 14和16呢 已经完全量产了 我们的 1843 呢
现在是可以提供样片给客户 预计是在今年的三季度量产
那么也就是说可以看出来 我们的产品呢
现在市场上呢,非常成熟的 一个毫米波雷达的方案
那么客户使用TI的平台呢, 可以很快推出自己的产品
另外一点呢,就是因为我们 现在的是汽车产品的系列
所以说我们的这些芯片呢, 对安全等级的要求都是非常高的
我们的12,16和18呢 符合 ASIL-B 的这个安全等级的
这样的一个标准 那么1443呢 因为它主要做的是一些 (听不清)
应用比如说,像开车门告警 或者是这个障碍物检测呢
所以说呢 1443 没有支持 ASIL-B
下面呢,这张图当中,给大家画了 一些我们TI现在的硬件开发平台
那么左边这张图 相信大家会比较熟悉
就是我们现在的 AWR的 1243,1443,1642和1843
这个开发板 我们把它命名为 Boostpad 这样的开发板
那么,在这个开发板上面呢 除了我们的毫米波雷达的芯片
我们的板载天线之外 还有我们 还有集成了对应的这些电源
这样的一些模块。 以及各种板子的各种调试的接口
比如说你像板载的Gtech的接口啊
Can的接口啊 以及高速 数据传输的这样一个接口
那么客户呢,拿到我们的 开发板之后呢
就可以跑我们的TI的各种参考设计 那么后面会介绍到我们TI 呢
针对毫米波雷达的各种应用呢
我们提供了很多参考设计给大家
右边的第二张图呢 是我们的TI的EVM版再配合
后面的这块绿色的就是 我们叫做 dc 1000 的数据采集卡
去构成的一个雷达 数据采集的平台
因为很多客户呢 在雷达的开发过程当中呢
需要去测试,我们毫米波雷达的射频的性能以及呢在做算法开发的时候
需要采集到雷达原始的这个 ADC 数据再结合自己的算法
去做性能的分析, 那么,在这个应用当中呢
我们就需要高速实时地去 采集我们雷达的这个 ADC 的数据
那么在我们的DCA 1000 板子
通过一个蓝色的高速的这个传输的 电缆将我们雷达的采集的 ADC 数据
实时地传递到我们的 dc 1000板子的上面
然后dc 1000板子呢 再把这个雷达的 数据呢再转换成这个以太网的接口
通过网线呢发给电脑上的上位机 那么这种数据的采集呢
是实时的进行的 那么客户呢, 拿到了我们的这个原始数据之后
保存的可以保存成一个原始的 数据文件去进行各种分析
那下面的第三块呢和 第四块的板子呢
都是我们的一些TI的一些第三方 合作伙伴所做的一些开发
我们的第三块呢, 是一块基于TI的 1243
加上TI 的TDA3X 它是一个高性能的 基于 ADAS的处理器平台
它做雷达可以完成的 雷达的后端的信号处理
那么第三块板子呢, 是我们的一个第三方合作伙伴
基于刚才讲到这两款芯片呢 开发了一个前项类的参考设计
那第四个板子呢,是基于我们的 AWR的 1642 去做的一个
非常小的尺寸是 34 乘以 38毫米的这样
带芯片的雷达的 这样的一个参考设计
前面呢,介绍到了 我们产品的一些性能
那么下面呢?我这里会结合 当前汽车雷达的一些常用的应用场景
给大家介绍一下我们的 毫米波雷达和这些应用场景呢
是怎么配合 其中呢,也会介绍 我们TI针对每一种应用场景
所推出来的一些参考设计
那么,我们现在将毫米波 雷达在汽车上的应用
大致可分成四个方向。 第一个方向呢是
第一个方向角雷达
角雷达呢就是我们现在常见的 把这个雷达的安装在
车辆的前后的四个角上的 一般它的典型的应用场景呢
像车载的盲区检测像变道辅助
那么,这些雷达呢,我们可以看到 在市场上现在可以看到非常多的
这样的一个产品有24g赫兹的 也有77g赫兹
因为角雷达呢 不涉及到车辆的主动控制
所以说呢 角雷达现在 市场上的产品呢
推出来的是非常多的。那么竞争 也非常激烈,那我们现在看到呢
角雷达的价格呢 在不断的下探 因此呢对于角雷达的应用场景
我们觉得产品的性价比 是现在最关键的一个指标
那么在这里呢 就会强调到我们 刚才介绍的TI的 1642 和 1843 的
是一个集成度非常高,同时性价价格呢, 也非常有优势的
一个单芯片的毫米波雷达解决方案
进行角雷达的开发呢 可以给客户呢 提供 非常多非常强
产品的竞争力
不仅是设计更简单而且 我们的整个产品的(听不清)
也会更加更加低。
那么 第二个方向呢就是 高性能的前向雷达
前向雷达,现在我们可以看到呢
现在主要的供应商呢, 还是国外的像 abcd 这样几家大的
这样的一个厂商 那么前向雷达呢 它要求探测雷达的探测距离
更远 角度 精度和角度分辨率呢更高
那么 同时呢 前向雷达 在实际使用的过程当中呢
往往需要和车辆的 主动控制系统比如说
像刹车这样的系统的配合起来
因此呢 前向雷达呢 对整个雷达的性能要求是非常高
那么 在这里呢就会 关联到我们在前面讲,
我TI的 1243, 可以支持多片级联
通过多片级联之后呢 我们可以让雷达看得更远
比如说我们通过四片级联可以 达到最远 350 米的这样一个探测距离
同时呢,也可以让雷达的 角度分辨率呢 做得更高
那么在四片级联底下呢, 我们会达到小于一度的这样的
角度的分辨率和角度的精度 那么 我们这里TI的 1243 多变级联方案
就非常适合于那些对性能要求 非常高的前向雷达的场景
第三款雷达呢,是和停车相关的雷达
停车呢,我们讲过的在 现在的停车的传感器当中呢
超声波是占主体的 那么后面呢, 我们也会给大家介绍
毫米波雷达相对于 超声波有很大的优势
我们很多的客户呢 现在正在研究 将毫米波雷达应用在停车系统当中
去取代超声波 那么第 4大块呢
是我们一些比较新的 把毫米波雷达呢
应用在车内的一些应用的情况
如说像驾驶员的心跳和 呼吸检测车内的成员检测
还有手势识别这样一些场景, 那么,我们下面呢,
都会给大家介绍到
上面的介绍呢,主要是针对我们刚才 前面讲到的这些应用场景以及TI
对应的一些参考设计, 给大家形象地展示一下我们的
毫米波雷达技术呢 是怎么应用在现在的汽车行业当中
那么,第一款参考设计呢, 是利用我们的 a w r的 1642
开发的一个叫短距雷达的 这样的一个参考设计
我们前面讲到过我们的 1642 是一个单芯片的集成方案
非常适合做车载的角雷达 那么,我们在这个参考设计当中呢
这个参考设计的名字是叫 TIDEP 0092
这是它编号 参考设计的名字就叫 short range radar
在这个参考设计当中呢 我们将 一个TI的 1642 的
这样的开发板放置在了 车子的这个前保险杠上
然后呢,在我们的高速公路上 去行驶 同时呢 我们在这个 1642
当中呢开发了一个完整的雷达
信号处理和目标跟踪 检测的这样的一个信号链
那么在这个配置当中呢 这个 SRRdemo参考这个设计当中呢
我们有支持有两种雷达的工作模式 第一种呢是80到 100 米的远距模式
第二种呢 是二十米的近距模式 在远距模式底下呢
我们的探测距离可以最远达到 120 米
我们的这个视角呢 这个 雷达的视角呢会窄一些
那么第二种呢,是在二十米的 近距模式底下我的雷达的探测
距离虽然很近, 但是我们的视角会更宽
同时呢,我的雷达的 分辨率会更高
那么左边的这两张图呢,就是分别 对应的刚才讲到的这两种参照模式呢
我们的测试结果, 我们可以看到上面这张图呢
就是在远距模式底下我们对车辆的 测试情况 最远呢可以测到 120 米的车辆
下面的这张图呢,是我们在 二十米近距模式底下我们可以看到的
在近距模式底下呢, 我们的雷达的分辨率可以做得很高
比如说我们可以看到这个高速公路 旁边的这样的一个围墙
我们可以看到前方的各个车辆的这样的一些形状 那么可以在雷达的车子前方
形成一个叫free room 也就是我们这个车辆呢
可以在行驶的这样的一个区间
我们这个参考设计的呢 所有的软件和硬件设计的资料呢
都可以在TI的网站上下载到
我这个今天的介绍到最后呢 会给大家提供一下这个下载的地址
第二个参考设计呢, 跟前面这个非常接近
但是呢,它是在我们的更新一代的 就是 a w r1843 上面开发的
我们把它定义 mid range radar
也就是一个中距雷达的应用场景 那么 1642 呢,主要的应用范围呢
是车载的角雷达。 那么 1843 呢 刚才介绍
因为它的功能更强 它多了一个发射 天线 同时信号处理能力
内存都更大,所以说 1843 呢 可以做150 m到200m探测范围之内的
一些中距离的雷达不光是包括角雷达 还可以做一些前向的雷达
那么在我们的这个测试呢, 参考设计当中
就是MRR这个参考设计当中呢 我们就把这个 1843 EVM板放在
放在车子的前方 然后基本的算法呢跟刚才讲过 1642
参考设计呢基本上比较类似 但是呢 它做了一些性能增强
那么,在前向的模式底下呢 我们可以看到最远 150 米的车辆
刚才讲过了 1642 是 120 米 那么在近距离的模式底下呢
因为我的雷达的分辨率更高了 我们可以检测出来就像我们这个
雷达在正对前方的一个停车场 有这个围栏以及后面的一些大的电缆
卷的时候呢 我们可以 看到一些完整的点云信息
同时呢, 1642 呢 因为多了一个发射天线
在我们的开发版当中呢我们把 一个发射天线呢布置在一个垂直的方向
所以说我不光可以去检测出来 雷达在水平方向的高角度
还可以检查出来雷达 在垂直方向的角度
我们可以形成一个 3d 也就是 垂直方向的这样的一个目标信息
就是在我刚才画的这个位置
第三个参考设计呢, 是关于我们停车领域的应用的
那么在停车领域呢 我们现在呢 有两个参考设计 分别针对
不同的应用。第一款呢 就是要针对于我们现在的叫做
自动停车系统那 我们在最近 看到很多关于无人驾驶
还有无人自动泊车的这样一个 应用场景 那么在停车的时候呢
如果是无人自动驾驶的停车呢, 在第一步呢我们要这个无人车
在停车场上面运动,在运动的时候呢 我们可以自主去找到当前可以停进去
这样的一个车位那么,这就是 TIDEP 01011 参考设计
所实现了一个场景, 我们将两个TI的雷达
分别装在了车子的左右两边那么 当车子在这个停车场运动的
这个轨迹运动的时候呢 我们可以检测出来车子
两边的这样一个轮廓和形状,那么在 这张图当中,我们可以看到
当你颜色比较深的这样的一些点 就是已经有车辆停进去的位置
那么,在另外一些比较空闲的 空白的这样的一些区域呢
就是当前可以停车的 这样的一个区域
那么,这个是针对于 未来的自动驾驶和自动停车
那么毫米波雷达呢 提供一个 非常高的这个实时成像的这个功能
第二个系统呢,就是说, 当我的这个车辆呢
找到了停车位之后呢我们希望 让车子呢能够自动的泊进去
那么现在在很多的车辆上面也有一个叫APA也叫自动泊车的一个系统
那么驾驶员只要按一个APA的 按键的车辆可以自动的泊进去
那么,现在的方案呢, 所使用的传感器主要是毫米波
主要是这个超声波方案, 那么是通过在车子的前后左右
布置十二个超声波的探头 行成一个APA 系统 超声波
相对于毫米波存在一些劣势
那么,首先, 因为超声波的视角比较窄
所以说呢,它很难覆盖大范围 那么在这张图当中
我们也看出来,尽管我的车子呢, 布置了十二个超声波探头
也还是没有办法对车辆 周边形成 360 度的环式覆盖
另外呢,超声波的探测 距离比较近。一般只能做到五米
同时呢,对于小于 十五米的目标呢
它存在检测盲区 这是因为 超声波这个探头的这个发播的
这个物理原理所导致
也就是说,当你的这个车辆呢, 靠得比较近的时候呢
小于十五厘米的 超声波的这个就会失效了
这会带来一些安全上的隐患
第三点呢,是因为我们的超声波呢 它没有办法去穿透
这个塑料件所以说呢 我们可以 看到在现在车子上面安装了
超声波探头的时候呢, 都需要在车辆的保险杠上面
进行打洞, 那这个对车辆的美观会造成影响
那毫米波雷达呢,就可以解决刚才我
所说的超声波这样的一些技术
那么首先,我们的毫米波雷达呢 我们的天线呢 可以进行分别
不同的设计可以形成一个 更加宽的FOV 那么
我只需要有六个到八个 毫米波雷达传感器呢
就可以对车辆进行一个 完整的 360 度的覆盖
第二个呢, 是我们的毫米波雷达的
因为我们现在的 每一个芯片的通道都非常多
我们可以使用一些通道呢 放在垂直方向上
那么,我就是不仅可以检测到这一个物体的水平的位置 还可以检测出来
它垂直的高度 那这个对于泊车来说
可以说是非常有帮助的
我第三点就是说 我们的这个毫米波雷达
因为我们的这个配置呢, 是非常灵活的
我们的多个天线之间 可以有一定的功能划分
也就是说 我用同样的这样的一个 雷达的硬件可以既支持到停车的
个应用场景 也可以支持到 其他的像盲点检测啊
这样,其他这个应用场景, 我们可以用一套硬件单元呢
实现了多种功能, 那这个是我们毫米波
这个是超声波所无法做到的
因为超声波呢,因为它的距离比较近,可能只能用在停车上面
第四个参考设计就是 我们前面刚才讲到的
我们有一个多片, 1243 级连在一起的 imagIng雷达的这样的一个应用场景
那这个通过将多片 1243级联连在一起之后呢
我们可以有形成一个 更多数量的一个天线的矩阵
比如说,在这里的这张图当中, 我们可以看到我们将四片 1243
放在了同一块板子上面
我们可以形成一个 十二根发射十六根接收的
12乘16的总共是 192 根 天线的这个虚拟阵列
那么天线数更多可以带来 很多的好处
首先是我们可以将多个发射天线的信号呢 在空间合成进行比波束赋形
我们可以将这样的好处呢,是可以 将发生在能量空间某个点集中起来
这样可以达到更远的探测距离
我们刚才讲过了在我们的四片1243
级联板子上面 最大的可以 实现了 350 米的探测距离
第二点呢,就是说因为我的 天线数通到更多了
那么,我们在使用10分或者码分的 这些Memo的应用场景当中
我的天线数通到更多 我可以 获得更高的分辨率
那么也就是说, 在雷达的这样一些近处呢
我们的这个雷达看到的物体 是更加清晰的
大家好,我是德州仪器的 技术工程师姚俊 今天呃,很高兴跟大家 在一起在网上相聚 我今天会给大家介绍一下 TI的毫米波雷达技术 在汽车领域的一些最新的情况 下面开始介绍具体的内容 首先给大家介绍一下TI的 毫米波雷达技术 一个发展的历史的发展的情况 TI是从大约是从十年前开始进行 77G毫米波雷达技术的研发 那么在TI进入这个领域之前 传统的毫米波雷达技术的 框图是左边的 这样的一个形式, 那么,我们可以看到 一个传统的毫米,一个 传统的雷达系统一般会包含两部分 一部分是射频的发射接收单元 另一部分是后面的数字信号处理单元 这两部分在传统的雷达上使用 两块不同的 pcb 板来实现的 那么TI的毫米波雷达技术从刚开始 我们就采用了一个单芯片的 这样的一个解决方案 也就是说我们将整个 射频的发射接收 ADC 的数据采集后端的 信号处理的 DSP 和 MCU 这些所有的功能都 集成了一个单芯片当中 那么可以实现这么高的集成度呢, 是因为 TI采用了叫 RFCmos 的工艺 那么传统的 CMOS 工艺呢 一般只能实现低频的数字电路 像我们通常所 使用的 MCU 或者是 DSP CMOS工艺呢, 很难实现一个高频的射频 实现高频的这个信号处理 TI我们大概是在十年前在 在TI内部 KLB实验室当中 我们开始研究将CMOS 工艺 用在 100 g 赫兹左右频段的这个高频 高频信号的发射和接收当中 那么在大概从十年前 到现在我们经历了四代的测试芯片 通过这四代的测试芯片 解决了CMOS工艺 在77G上所使用的一些技术问题 那么,最终呢我们是在, 最终呢我们是在 2016年 正式推出了TI的,基于 CMOS工艺的毫米波雷达的 传感器 那么这个 基于CMOS工艺的集成芯片呢 和传统的分立器件的 集成芯片对比呢 存在一些相应的优势 那么首先 因为传统的方案 会采用分立的器件来组成 所以这个设计的成本会比较高 另外,因为在芯片和芯片之间 以及板子和板子之间 要传输高频的射频信号 所以说,导致整个系统的电路设计 会更加复杂 同时,也更加容易引入噪声 那么,我们采用了单芯片的集成方案 之后可以带来的优势是显而易见的 首先是我们的这个 产品的设计会更简单 产品的尺寸可以做得更小,另外呢 是因为我们采用了将数字, 数字单元和射频单元 集成在了同一个芯片当中, 那么,我们就可以 更加容易的利用数字单元 去实时地监控射频单元的 信号质量。当我发现在 某些信号出现异常了之后 我可以及时地产生 报警和进行错误恢复 给系统提高了 更加更好的安全性 另外呢,就是因为我们的 集成度更高 所以说芯片的功耗更高 整个产品呢,成本也会大大地下降 那么右边的这张图呢? 是我们在,基于CMOS 工艺往后继续进行了演进 我们的第一代芯片呢 我们的天线呢 还是需要在 pcb 板上进行集成的 那么在我们下一代也就是在 今年我们会推出一个 AOP 的方案 就是 Antenna on Package 也就是我们将77g 毫米波雷达 所用到的天线也集成到了芯片当中 那么,这样做的好处呢 有下面几个 首先是 我们的方案设计会更加简单 因为我们原来要在 pcb 板上去实现这个天线那么 这个77g高频天线的 设计和合成,难度较大, 对加工精度的要求也非常高 另外呢 因为我们要在这 pcb 板上 去传输77g的高频信号 所以说我们在 pcb 板的 第一层和第二层要采用 比较昂贵的高频的板材 那么,这些板材呢? 不仅是价格比较高 而且在加工起来呢, 也比较困难 那么,我们通过将天线 集成在了芯片上了之后呢 那么,我们就不需要在 天线上面去传输77g的信号 我们可以使用一块普通的. Fr4的板材就可以 实现一个雷达系统 那么这会使得我们整个雷达系统的 (听不清)成本呢大大下降 同时也帮客户呢 节省了 进行天线开发的 这样的一个难度 所以说我们 可以看到我们后面会介绍 TI的现在的77g毫米波雷达芯片 我们有不集成天线的普通版本 有集成芯片的AOP版本 那么客户呢?可以根据自己的 需要呢进行灵活的选择 第二页呢,就是我刚才介绍到了 我们其实77g毫米波雷达芯片的 一些主要的优势,那我这里也 不再重复地强调了 我可以再重复一点呢, 就是说我们的设计呢 它的灵活性是非常高的。 那么,我们后面还会介绍 我们既有不集成 MCU 的 射频处理的芯片 也有集成了 MCU 和 DSP 的 单芯片的解决方案 那么还可以支持呢 多芯片的 级联 以及我们刚才介绍 我们还有把天线也集成在 芯片上的AOP的版本 也就是说我们给广大的雷达 客户呢,提供了非常多的选择 客户呢,可以根据自己对产品的 性能要求和产品价格的要求 就选择适合自己的方案 那下面再给大家介绍一下 我们现在推出来的 四款汽车毫米波雷达芯片 那么首先呢,在刚开始呢 我给大家强调一点,那么 TI在毫米波雷达呢, 我们是分成两个产品系列的 我这里介绍的呢,是我们汽车的产品 系列的这个毫米波雷达这些产品 是以AWR 也就是automotive mmWave radar 这个AWR 字母为开始的缩写 我们还有另外一个就是 针对工业雷达的运用 那么,那一款系列呢, 包含77g 也包含60g频段 毫米波雷达,那这些产品呢, 它是以 IWR这个命名开始 回到这里。对于汽车上面来讲 我们的毫米波雷达呢?我们现在推出 四款产品分别是 AWR 1243,1443 1642 和 1843 那么,这四款产品呢,我们会 我下来给大家分别做一个介绍 那么首先是 AWR的 1243 是一个集成了 三个发射通道 四个接收通道 内部的频率合成单元以及后端的ADC 对外的CSI2的接口和 SPI 接口 一个射频前端的电路 在 1243 当中呢,我们没有 集成 DSP 和 MCU 也就是说。 1243 本身呢,是不具有 数字信号处理的能力的, 它需要外部接一个 MCU 或者 DSP 呢来组成雷达系统 那么 1243 呢有一个非常强大的功能 就是我们可以支持多芯片的级联 构成一个imaging 雷达 这样的一个方案, 我们可以支持两片 四片 或者更多的 1243 级联 那么多芯片级联的好处呢 我们后面会给大家介绍到 可以让雷达看得更远 也可以让 雷达看得更清晰。 那么第二款芯片呢, 是我们的 AWR 1443 芯片 那么对管对比 1443 和 1243 呢 我们可以发现在芯片内部 我们增加了一个r4f 的 MCU 那么刚才我们讲到呢 1243 需要配合一个外部的 MCU 才能工作 那么 1443上面呢,我们就把 这个 MCU 放到芯片里面 同时呢?我们还集成了一个 雷达的加速器 这个加速器呢 可以完成 常用的毫米波雷达的 算法比如像 fft 的算法 像 c (听不清)算法 同时在芯片,当中呢, 我们还继承了 576 k 的RAM 那么对比 1243和1443 我们就可以看出来, 1443 呢,因为集成了MCU 雷达加速器以及内存 它就是一个完整的单芯片的 雷达的解决方案 1443 呢 一般是适用于一些对雷达探测距离 要求不是很高的这些短距和 超短距雷达的一些应用场景 比如说 像接近度传感器 像障碍物检测的传感器 我们下面呢,会讲到 这些分别介绍到这些应用 第三款芯片呢,就是我们现在 关注度最高的一款是 AWR 的 1642。那么对比 1642 1443 我们可以看到 除了内部的 这个 MCU 之外呢,我们还集成了 一个TI的 c 674 X 这样一个DSP核 我们在1443中 集成的是一个雷达加速器 我们在 1642 当中呢 把它换成了这样的一个 DSP 核 DSP 核的好处呢 就是提供了 一个非常好的灵活非常高的这样的 可编程性 因为硬件加速器 当中所运行的算法呢 一般是比较通用的固定的算法 而客户呢 如果有一些自己特殊 ip 或者是一些特殊的算法呢, 我们可以通过编程 我们的 c 674 X的这个 DSP 上面呢 得到灵活的支持 同时呢,我们 1642 当中还 继承了 1. 5 兆的内存 以及汽车上面常用的 can fd 的和 can 的接口 那么,我们可以看出来呢, 1642 呢,是一个单芯片的性价比 非常高的这样的一个 雷达的解决方案 那么1642一般是运用在 车载的超远距的雷达 和短距的雷达这样的应用场景 那么后面呢,我们也会介绍到。 针对 1642 的一些特定的应用 第四款呢,是我们现在 推出来的就是 AWR的1843 这样的毫米波雷达的芯片 那么 1843 呢 可以看成是 1642 的 一个性能增强版。那么除了 1642 对应的这些单元之外呢 首先我们把这个发射的通道呢, 从 1642 的两个增加到了三个 内存呢,从 1642 的 1. 5 兆 增加到了两兆 另外呢?我们还把对应的雷达的 加速器也集成在芯片当中 那么,我们可以看出来呢 1843 的对比 1642 来说呢 不仅是我的发射通道增加了一个 同时呢 我后端的信号处理的能力呢, 也大大的提升 我们有了雷达的硬件加速器也有了 TI的 c 674 X的DSP核 我们可以将硬件加速器呢和 DSP核 并行起来进行使用 这样可以实现更加复杂的算法 那么刚才介绍的那个四款芯片呢 我们现在呢 前面的那三款芯片, 现在已经全部量产了 我们的12 14和16呢 已经完全量产了 我们的 1843 呢 现在是可以提供样片给客户 预计是在今年的三季度量产 那么也就是说可以看出来 我们的产品呢 现在市场上呢,非常成熟的 一个毫米波雷达的方案 那么客户使用TI的平台呢, 可以很快推出自己的产品 另外一点呢,就是因为我们 现在的是汽车产品的系列 所以说我们的这些芯片呢, 对安全等级的要求都是非常高的 我们的12,16和18呢 符合 ASIL-B 的这个安全等级的 这样的一个标准 那么1443呢 因为它主要做的是一些 (听不清) 应用比如说,像开车门告警 或者是这个障碍物检测呢 所以说呢 1443 没有支持 ASIL-B 下面呢,这张图当中,给大家画了 一些我们TI现在的硬件开发平台 那么左边这张图 相信大家会比较熟悉 就是我们现在的 AWR的 1243,1443,1642和1843 这个开发板 我们把它命名为 Boostpad 这样的开发板 那么,在这个开发板上面呢 除了我们的毫米波雷达的芯片 我们的板载天线之外 还有我们 还有集成了对应的这些电源 这样的一些模块。 以及各种板子的各种调试的接口 比如说你像板载的Gtech的接口啊 Can的接口啊 以及高速 数据传输的这样一个接口 那么客户呢,拿到我们的 开发板之后呢 就可以跑我们的TI的各种参考设计 那么后面会介绍到我们TI 呢 针对毫米波雷达的各种应用呢 我们提供了很多参考设计给大家 右边的第二张图呢 是我们的TI的EVM版再配合 后面的这块绿色的就是 我们叫做 dc 1000 的数据采集卡 去构成的一个雷达 数据采集的平台 因为很多客户呢 在雷达的开发过程当中呢 需要去测试,我们毫米波雷达的射频的性能以及呢在做算法开发的时候 需要采集到雷达原始的这个 ADC 数据再结合自己的算法 去做性能的分析, 那么,在这个应用当中呢 我们就需要高速实时地去 采集我们雷达的这个 ADC 的数据 那么在我们的DCA 1000 板子 通过一个蓝色的高速的这个传输的 电缆将我们雷达的采集的 ADC 数据 实时地传递到我们的 dc 1000板子的上面 然后dc 1000板子呢 再把这个雷达的 数据呢再转换成这个以太网的接口 通过网线呢发给电脑上的上位机 那么这种数据的采集呢 是实时的进行的 那么客户呢, 拿到了我们的这个原始数据之后 保存的可以保存成一个原始的 数据文件去进行各种分析 那下面的第三块呢和 第四块的板子呢 都是我们的一些TI的一些第三方 合作伙伴所做的一些开发 我们的第三块呢, 是一块基于TI的 1243 加上TI 的TDA3X 它是一个高性能的 基于 ADAS的处理器平台 它做雷达可以完成的 雷达的后端的信号处理 那么第三块板子呢, 是我们的一个第三方合作伙伴 基于刚才讲到这两款芯片呢 开发了一个前项类的参考设计 那第四个板子呢,是基于我们的 AWR的 1642 去做的一个 非常小的尺寸是 34 乘以 38毫米的这样 带芯片的雷达的 这样的一个参考设计 前面呢,介绍到了 我们产品的一些性能 那么下面呢?我这里会结合 当前汽车雷达的一些常用的应用场景 给大家介绍一下我们的 毫米波雷达和这些应用场景呢 是怎么配合 其中呢,也会介绍 我们TI针对每一种应用场景 所推出来的一些参考设计 那么,我们现在将毫米波 雷达在汽车上的应用 大致可分成四个方向。 第一个方向呢是 第一个方向角雷达 角雷达呢就是我们现在常见的 把这个雷达的安装在 车辆的前后的四个角上的 一般它的典型的应用场景呢 像车载的盲区检测像变道辅助 那么,这些雷达呢,我们可以看到 在市场上现在可以看到非常多的 这样的一个产品有24g赫兹的 也有77g赫兹 因为角雷达呢 不涉及到车辆的主动控制 所以说呢 角雷达现在 市场上的产品呢 推出来的是非常多的。那么竞争 也非常激烈,那我们现在看到呢 角雷达的价格呢 在不断的下探 因此呢对于角雷达的应用场景 我们觉得产品的性价比 是现在最关键的一个指标 那么在这里呢 就会强调到我们 刚才介绍的TI的 1642 和 1843 的 是一个集成度非常高,同时性价价格呢, 也非常有优势的 一个单芯片的毫米波雷达解决方案 进行角雷达的开发呢 可以给客户呢 提供 非常多非常强 产品的竞争力 不仅是设计更简单而且 我们的整个产品的(听不清) 也会更加更加低。 那么 第二个方向呢就是 高性能的前向雷达 前向雷达,现在我们可以看到呢 现在主要的供应商呢, 还是国外的像 abcd 这样几家大的 这样的一个厂商 那么前向雷达呢 它要求探测雷达的探测距离 更远 角度 精度和角度分辨率呢更高 那么 同时呢 前向雷达 在实际使用的过程当中呢 往往需要和车辆的 主动控制系统比如说 像刹车这样的系统的配合起来 因此呢 前向雷达呢 对整个雷达的性能要求是非常高 那么 在这里呢就会 关联到我们在前面讲, 我TI的 1243, 可以支持多片级联 通过多片级联之后呢 我们可以让雷达看得更远 比如说我们通过四片级联可以 达到最远 350 米的这样一个探测距离 同时呢,也可以让雷达的 角度分辨率呢 做得更高 那么在四片级联底下呢, 我们会达到小于一度的这样的 角度的分辨率和角度的精度 那么 我们这里TI的 1243 多变级联方案 就非常适合于那些对性能要求 非常高的前向雷达的场景 第三款雷达呢,是和停车相关的雷达 停车呢,我们讲过的在 现在的停车的传感器当中呢 超声波是占主体的 那么后面呢, 我们也会给大家介绍 毫米波雷达相对于 超声波有很大的优势 我们很多的客户呢 现在正在研究 将毫米波雷达应用在停车系统当中 去取代超声波 那么第 4大块呢 是我们一些比较新的 把毫米波雷达呢 应用在车内的一些应用的情况 如说像驾驶员的心跳和 呼吸检测车内的成员检测 还有手势识别这样一些场景, 那么,我们下面呢, 都会给大家介绍到 上面的介绍呢,主要是针对我们刚才 前面讲到的这些应用场景以及TI 对应的一些参考设计, 给大家形象地展示一下我们的 毫米波雷达技术呢 是怎么应用在现在的汽车行业当中 那么,第一款参考设计呢, 是利用我们的 a w r的 1642 开发的一个叫短距雷达的 这样的一个参考设计 我们前面讲到过我们的 1642 是一个单芯片的集成方案 非常适合做车载的角雷达 那么,我们在这个参考设计当中呢 这个参考设计的名字是叫 TIDEP 0092 这是它编号 参考设计的名字就叫 short range radar 在这个参考设计当中呢 我们将 一个TI的 1642 的 这样的开发板放置在了 车子的这个前保险杠上 然后呢,在我们的高速公路上 去行驶 同时呢 我们在这个 1642 当中呢开发了一个完整的雷达 信号处理和目标跟踪 检测的这样的一个信号链 那么在这个配置当中呢 这个 SRRdemo参考这个设计当中呢 我们有支持有两种雷达的工作模式 第一种呢是80到 100 米的远距模式 第二种呢 是二十米的近距模式 在远距模式底下呢 我们的探测距离可以最远达到 120 米 我们的这个视角呢 这个 雷达的视角呢会窄一些 那么第二种呢,是在二十米的 近距模式底下我的雷达的探测 距离虽然很近, 但是我们的视角会更宽 同时呢,我的雷达的 分辨率会更高 那么左边的这两张图呢,就是分别 对应的刚才讲到的这两种参照模式呢 我们的测试结果, 我们可以看到上面这张图呢 就是在远距模式底下我们对车辆的 测试情况 最远呢可以测到 120 米的车辆 下面的这张图呢,是我们在 二十米近距模式底下我们可以看到的 在近距模式底下呢, 我们的雷达的分辨率可以做得很高 比如说我们可以看到这个高速公路 旁边的这样的一个围墙 我们可以看到前方的各个车辆的这样的一些形状 那么可以在雷达的车子前方 形成一个叫free room 也就是我们这个车辆呢 可以在行驶的这样的一个区间 我们这个参考设计的呢 所有的软件和硬件设计的资料呢 都可以在TI的网站上下载到 我这个今天的介绍到最后呢 会给大家提供一下这个下载的地址 第二个参考设计呢, 跟前面这个非常接近 但是呢,它是在我们的更新一代的 就是 a w r1843 上面开发的 我们把它定义 mid range radar 也就是一个中距雷达的应用场景 那么 1642 呢,主要的应用范围呢 是车载的角雷达。 那么 1843 呢 刚才介绍 因为它的功能更强 它多了一个发射 天线 同时信号处理能力 内存都更大,所以说 1843 呢 可以做150 m到200m探测范围之内的 一些中距离的雷达不光是包括角雷达 还可以做一些前向的雷达 那么在我们的这个测试呢, 参考设计当中 就是MRR这个参考设计当中呢 我们就把这个 1843 EVM板放在 放在车子的前方 然后基本的算法呢跟刚才讲过 1642 参考设计呢基本上比较类似 但是呢 它做了一些性能增强 那么,在前向的模式底下呢 我们可以看到最远 150 米的车辆 刚才讲过了 1642 是 120 米 那么在近距离的模式底下呢 因为我的雷达的分辨率更高了 我们可以检测出来就像我们这个 雷达在正对前方的一个停车场 有这个围栏以及后面的一些大的电缆 卷的时候呢 我们可以 看到一些完整的点云信息 同时呢, 1642 呢 因为多了一个发射天线 在我们的开发版当中呢我们把 一个发射天线呢布置在一个垂直的方向 所以说我不光可以去检测出来 雷达在水平方向的高角度 还可以检查出来雷达 在垂直方向的角度 我们可以形成一个 3d 也就是 垂直方向的这样的一个目标信息 就是在我刚才画的这个位置 第三个参考设计呢, 是关于我们停车领域的应用的 那么在停车领域呢 我们现在呢 有两个参考设计 分别针对 不同的应用。第一款呢 就是要针对于我们现在的叫做 自动停车系统那 我们在最近 看到很多关于无人驾驶 还有无人自动泊车的这样一个 应用场景 那么在停车的时候呢 如果是无人自动驾驶的停车呢, 在第一步呢我们要这个无人车 在停车场上面运动,在运动的时候呢 我们可以自主去找到当前可以停进去 这样的一个车位那么,这就是 TIDEP 01011 参考设计 所实现了一个场景, 我们将两个TI的雷达 分别装在了车子的左右两边那么 当车子在这个停车场运动的 这个轨迹运动的时候呢 我们可以检测出来车子 两边的这样一个轮廓和形状,那么在 这张图当中,我们可以看到 当你颜色比较深的这样的一些点 就是已经有车辆停进去的位置 那么,在另外一些比较空闲的 空白的这样的一些区域呢 就是当前可以停车的 这样的一个区域 那么,这个是针对于 未来的自动驾驶和自动停车 那么毫米波雷达呢 提供一个 非常高的这个实时成像的这个功能 第二个系统呢,就是说, 当我的这个车辆呢 找到了停车位之后呢我们希望 让车子呢能够自动的泊进去 那么现在在很多的车辆上面也有一个叫APA也叫自动泊车的一个系统 那么驾驶员只要按一个APA的 按键的车辆可以自动的泊进去 那么,现在的方案呢, 所使用的传感器主要是毫米波 主要是这个超声波方案, 那么是通过在车子的前后左右 布置十二个超声波的探头 行成一个APA 系统 超声波 相对于毫米波存在一些劣势 那么,首先, 因为超声波的视角比较窄 所以说呢,它很难覆盖大范围 那么在这张图当中 我们也看出来,尽管我的车子呢, 布置了十二个超声波探头 也还是没有办法对车辆 周边形成 360 度的环式覆盖 另外呢,超声波的探测 距离比较近。一般只能做到五米 同时呢,对于小于 十五米的目标呢 它存在检测盲区 这是因为 超声波这个探头的这个发播的 这个物理原理所导致 也就是说,当你的这个车辆呢, 靠得比较近的时候呢 小于十五厘米的 超声波的这个就会失效了 这会带来一些安全上的隐患 第三点呢,是因为我们的超声波呢 它没有办法去穿透 这个塑料件所以说呢 我们可以 看到在现在车子上面安装了 超声波探头的时候呢, 都需要在车辆的保险杠上面 进行打洞, 那这个对车辆的美观会造成影响 那毫米波雷达呢,就可以解决刚才我 所说的超声波这样的一些技术 那么首先,我们的毫米波雷达呢 我们的天线呢 可以进行分别 不同的设计可以形成一个 更加宽的FOV 那么 我只需要有六个到八个 毫米波雷达传感器呢 就可以对车辆进行一个 完整的 360 度的覆盖 第二个呢, 是我们的毫米波雷达的 因为我们现在的 每一个芯片的通道都非常多 我们可以使用一些通道呢 放在垂直方向上 那么,我就是不仅可以检测到这一个物体的水平的位置 还可以检测出来 它垂直的高度 那这个对于泊车来说 可以说是非常有帮助的 我第三点就是说 我们的这个毫米波雷达 因为我们的这个配置呢, 是非常灵活的 我们的多个天线之间 可以有一定的功能划分 也就是说 我用同样的这样的一个 雷达的硬件可以既支持到停车的 个应用场景 也可以支持到 其他的像盲点检测啊 这样,其他这个应用场景, 我们可以用一套硬件单元呢 实现了多种功能, 那这个是我们毫米波 这个是超声波所无法做到的 因为超声波呢,因为它的距离比较近,可能只能用在停车上面 第四个参考设计就是 我们前面刚才讲到的 我们有一个多片, 1243 级连在一起的 imagIng雷达的这样的一个应用场景 那这个通过将多片 1243级联连在一起之后呢 我们可以有形成一个 更多数量的一个天线的矩阵 比如说,在这里的这张图当中, 我们可以看到我们将四片 1243 放在了同一块板子上面 我们可以形成一个 十二根发射十六根接收的 12乘16的总共是 192 根 天线的这个虚拟阵列 那么天线数更多可以带来 很多的好处 首先是我们可以将多个发射天线的信号呢 在空间合成进行比波束赋形 我们可以将这样的好处呢,是可以 将发生在能量空间某个点集中起来 这样可以达到更远的探测距离 我们刚才讲过了在我们的四片1243 级联板子上面 最大的可以 实现了 350 米的探测距离 第二点呢,就是说因为我的 天线数通到更多了 那么,我们在使用10分或者码分的 这些Memo的应用场景当中 我的天线数通到更多 我可以 获得更高的分辨率 那么也就是说, 在雷达的这样一些近处呢 我们的这个雷达看到的物体 是更加清晰的
大家好,我是德州仪器的 技术工程师姚俊
今天呃,很高兴跟大家 在一起在网上相聚
我今天会给大家介绍一下 TI的毫米波雷达技术
在汽车领域的一些最新的情况
下面开始介绍具体的内容
首先给大家介绍一下TI的 毫米波雷达技术
一个发展的历史的发展的情况
TI是从大约是从十年前开始进行 77G毫米波雷达技术的研发
那么在TI进入这个领域之前
传统的毫米波雷达技术的 框图是左边的
这样的一个形式, 那么,我们可以看到
一个传统的毫米,一个 传统的雷达系统一般会包含两部分
一部分是射频的发射接收单元
另一部分是后面的数字信号处理单元
这两部分在传统的雷达上使用 两块不同的 pcb 板来实现的
那么TI的毫米波雷达技术从刚开始
我们就采用了一个单芯片的 这样的一个解决方案
也就是说我们将整个 射频的发射接收
ADC 的数据采集后端的 信号处理的 DSP 和 MCU
这些所有的功能都 集成了一个单芯片当中
那么可以实现这么高的集成度呢, 是因为 TI采用了叫 RFCmos 的工艺
那么传统的 CMOS 工艺呢 一般只能实现低频的数字电路
像我们通常所 使用的 MCU 或者是 DSP
CMOS工艺呢, 很难实现一个高频的射频
实现高频的这个信号处理 TI我们大概是在十年前在
在TI内部 KLB实验室当中 我们开始研究将CMOS 工艺
用在 100 g 赫兹左右频段的这个高频
高频信号的发射和接收当中 那么在大概从十年前
到现在我们经历了四代的测试芯片
通过这四代的测试芯片 解决了CMOS工艺
在77G上所使用的一些技术问题
那么,最终呢我们是在, 最终呢我们是在 2016年
正式推出了TI的,基于 CMOS工艺的毫米波雷达的
传感器 那么这个
基于CMOS工艺的集成芯片呢 和传统的分立器件的
集成芯片对比呢 存在一些相应的优势 那么首先 因为传统的方案
会采用分立的器件来组成 所以这个设计的成本会比较高
另外,因为在芯片和芯片之间 以及板子和板子之间
要传输高频的射频信号 所以说,导致整个系统的电路设计
会更加复杂 同时,也更加容易引入噪声
那么,我们采用了单芯片的集成方案 之后可以带来的优势是显而易见的
首先是我们的这个 产品的设计会更简单
产品的尺寸可以做得更小,另外呢
是因为我们采用了将数字, 数字单元和射频单元
集成在了同一个芯片当中, 那么,我们就可以
更加容易的利用数字单元 去实时地监控射频单元的
信号质量。当我发现在 某些信号出现异常了之后
我可以及时地产生 报警和进行错误恢复
给系统提高了 更加更好的安全性
另外呢,就是因为我们的 集成度更高 所以说芯片的功耗更高
整个产品呢,成本也会大大地下降 那么右边的这张图呢?
是我们在,基于CMOS 工艺往后继续进行了演进
我们的第一代芯片呢 我们的天线呢
还是需要在 pcb 板上进行集成的
那么在我们下一代也就是在 今年我们会推出一个
AOP 的方案 就是 Antenna on Package 也就是我们将77g 毫米波雷达
所用到的天线也集成到了芯片当中
那么,这样做的好处呢 有下面几个 首先是
我们的方案设计会更加简单 因为我们原来要在
pcb 板上去实现这个天线那么 这个77g高频天线的
设计和合成,难度较大, 对加工精度的要求也非常高
另外呢 因为我们要在这 pcb 板上 去传输77g的高频信号
所以说我们在 pcb 板的 第一层和第二层要采用
比较昂贵的高频的板材
那么,这些板材呢? 不仅是价格比较高
而且在加工起来呢, 也比较困难
那么,我们通过将天线 集成在了芯片上了之后呢
那么,我们就不需要在 天线上面去传输77g的信号
我们可以使用一块普通的. Fr4的板材就可以
实现一个雷达系统
那么这会使得我们整个雷达系统的 (听不清)成本呢大大下降
同时也帮客户呢 节省了 进行天线开发的
这样的一个难度 所以说我们 可以看到我们后面会介绍
TI的现在的77g毫米波雷达芯片 我们有不集成天线的普通版本
有集成芯片的AOP版本
那么客户呢?可以根据自己的 需要呢进行灵活的选择
第二页呢,就是我刚才介绍到了 我们其实77g毫米波雷达芯片的
一些主要的优势,那我这里也 不再重复地强调了
我可以再重复一点呢, 就是说我们的设计呢
它的灵活性是非常高的。 那么,我们后面还会介绍
我们既有不集成 MCU 的 射频处理的芯片
也有集成了 MCU 和 DSP 的 单芯片的解决方案
那么还可以支持呢 多芯片的 级联 以及我们刚才介绍
我们还有把天线也集成在 芯片上的AOP的版本
也就是说我们给广大的雷达 客户呢,提供了非常多的选择
客户呢,可以根据自己对产品的 性能要求和产品价格的要求
就选择适合自己的方案 那下面再给大家介绍一下
我们现在推出来的 四款汽车毫米波雷达芯片
那么首先呢,在刚开始呢 我给大家强调一点,那么
TI在毫米波雷达呢, 我们是分成两个产品系列的
我这里介绍的呢,是我们汽车的产品 系列的这个毫米波雷达这些产品
是以AWR 也就是automotive mmWave radar 这个AWR 字母为开始的缩写
我们还有另外一个就是 针对工业雷达的运用
那么,那一款系列呢, 包含77g 也包含60g频段
毫米波雷达,那这些产品呢, 它是以 IWR这个命名开始
回到这里。对于汽车上面来讲
我们的毫米波雷达呢?我们现在推出 四款产品分别是 AWR 1243,1443
1642 和 1843
那么,这四款产品呢,我们会 我下来给大家分别做一个介绍
那么首先是 AWR的 1243 是一个集成了
三个发射通道 四个接收通道 内部的频率合成单元以及后端的ADC
对外的CSI2的接口和 SPI 接口 一个射频前端的电路
在 1243 当中呢,我们没有 集成 DSP 和 MCU
也就是说。 1243 本身呢,是不具有 数字信号处理的能力的,
它需要外部接一个 MCU 或者 DSP 呢来组成雷达系统
那么 1243 呢有一个非常强大的功能
就是我们可以支持多芯片的级联 构成一个imaging 雷达
这样的一个方案, 我们可以支持两片 四片
或者更多的 1243 级联 那么多芯片级联的好处呢
我们后面会给大家介绍到 可以让雷达看得更远 也可以让
雷达看得更清晰。 那么第二款芯片呢,
是我们的 AWR 1443 芯片
那么对管对比 1443 和 1243 呢 我们可以发现在芯片内部
我们增加了一个r4f 的 MCU 那么刚才我们讲到呢
1243 需要配合一个外部的 MCU 才能工作
那么 1443上面呢,我们就把 这个 MCU 放到芯片里面
同时呢?我们还集成了一个 雷达的加速器 这个加速器呢
可以完成 常用的毫米波雷达的 算法比如像 fft 的算法
像 c (听不清)算法
同时在芯片,当中呢, 我们还继承了 576 k 的RAM
那么对比 1243和1443
我们就可以看出来, 1443 呢,因为集成了MCU
雷达加速器以及内存 它就是一个完整的单芯片的
雷达的解决方案 1443 呢 一般是适用于一些对雷达探测距离
要求不是很高的这些短距和 超短距雷达的一些应用场景
比如说 像接近度传感器 像障碍物检测的传感器
我们下面呢,会讲到 这些分别介绍到这些应用
第三款芯片呢,就是我们现在 关注度最高的一款是
AWR 的 1642。那么对比 1642 1443 我们可以看到 除了内部的
这个 MCU 之外呢,我们还集成了 一个TI的 c 674 X
这样一个DSP核 我们在1443中
集成的是一个雷达加速器 我们在 1642 当中呢
把它换成了这样的一个 DSP 核
DSP 核的好处呢 就是提供了 一个非常好的灵活非常高的这样的
可编程性 因为硬件加速器 当中所运行的算法呢
一般是比较通用的固定的算法 而客户呢 如果有一些自己特殊
ip 或者是一些特殊的算法呢, 我们可以通过编程
我们的 c 674 X的这个 DSP 上面呢 得到灵活的支持
同时呢,我们 1642 当中还 继承了 1. 5 兆的内存
以及汽车上面常用的 can fd 的和 can 的接口
那么,我们可以看出来呢, 1642 呢,是一个单芯片的性价比
非常高的这样的一个 雷达的解决方案
那么1642一般是运用在 车载的超远距的雷达
和短距的雷达这样的应用场景
那么后面呢,我们也会介绍到。 针对 1642 的一些特定的应用
第四款呢,是我们现在 推出来的就是 AWR的1843
这样的毫米波雷达的芯片 那么 1843 呢 可以看成是 1642 的
一个性能增强版。那么除了 1642 对应的这些单元之外呢
首先我们把这个发射的通道呢, 从 1642 的两个增加到了三个
内存呢,从 1642 的 1. 5 兆 增加到了两兆
另外呢?我们还把对应的雷达的 加速器也集成在芯片当中
那么,我们可以看出来呢 1843 的对比 1642 来说呢
不仅是我的发射通道增加了一个
同时呢 我后端的信号处理的能力呢, 也大大的提升
我们有了雷达的硬件加速器也有了 TI的 c 674 X的DSP核
我们可以将硬件加速器呢和 DSP核 并行起来进行使用
这样可以实现更加复杂的算法
那么刚才介绍的那个四款芯片呢
我们现在呢 前面的那三款芯片, 现在已经全部量产了
我们的12 14和16呢 已经完全量产了 我们的 1843 呢
现在是可以提供样片给客户 预计是在今年的三季度量产
那么也就是说可以看出来 我们的产品呢
现在市场上呢,非常成熟的 一个毫米波雷达的方案
那么客户使用TI的平台呢, 可以很快推出自己的产品
另外一点呢,就是因为我们 现在的是汽车产品的系列
所以说我们的这些芯片呢, 对安全等级的要求都是非常高的
我们的12,16和18呢 符合 ASIL-B 的这个安全等级的
这样的一个标准 那么1443呢 因为它主要做的是一些 (听不清)
应用比如说,像开车门告警 或者是这个障碍物检测呢
所以说呢 1443 没有支持 ASIL-B
下面呢,这张图当中,给大家画了 一些我们TI现在的硬件开发平台
那么左边这张图 相信大家会比较熟悉
就是我们现在的 AWR的 1243,1443,1642和1843
这个开发板 我们把它命名为 Boostpad 这样的开发板
那么,在这个开发板上面呢 除了我们的毫米波雷达的芯片
我们的板载天线之外 还有我们 还有集成了对应的这些电源
这样的一些模块。 以及各种板子的各种调试的接口
比如说你像板载的Gtech的接口啊
Can的接口啊 以及高速 数据传输的这样一个接口
那么客户呢,拿到我们的 开发板之后呢
就可以跑我们的TI的各种参考设计 那么后面会介绍到我们TI 呢
针对毫米波雷达的各种应用呢
我们提供了很多参考设计给大家
右边的第二张图呢 是我们的TI的EVM版再配合
后面的这块绿色的就是 我们叫做 dc 1000 的数据采集卡
去构成的一个雷达 数据采集的平台
因为很多客户呢 在雷达的开发过程当中呢
需要去测试,我们毫米波雷达的射频的性能以及呢在做算法开发的时候
需要采集到雷达原始的这个 ADC 数据再结合自己的算法
去做性能的分析, 那么,在这个应用当中呢
我们就需要高速实时地去 采集我们雷达的这个 ADC 的数据
那么在我们的DCA 1000 板子
通过一个蓝色的高速的这个传输的 电缆将我们雷达的采集的 ADC 数据
实时地传递到我们的 dc 1000板子的上面
然后dc 1000板子呢 再把这个雷达的 数据呢再转换成这个以太网的接口
通过网线呢发给电脑上的上位机 那么这种数据的采集呢
是实时的进行的 那么客户呢, 拿到了我们的这个原始数据之后
保存的可以保存成一个原始的 数据文件去进行各种分析
那下面的第三块呢和 第四块的板子呢
都是我们的一些TI的一些第三方 合作伙伴所做的一些开发
我们的第三块呢, 是一块基于TI的 1243
加上TI 的TDA3X 它是一个高性能的 基于 ADAS的处理器平台
它做雷达可以完成的 雷达的后端的信号处理
那么第三块板子呢, 是我们的一个第三方合作伙伴
基于刚才讲到这两款芯片呢 开发了一个前项类的参考设计
那第四个板子呢,是基于我们的 AWR的 1642 去做的一个
非常小的尺寸是 34 乘以 38毫米的这样
带芯片的雷达的 这样的一个参考设计
前面呢,介绍到了 我们产品的一些性能
那么下面呢?我这里会结合 当前汽车雷达的一些常用的应用场景
给大家介绍一下我们的 毫米波雷达和这些应用场景呢
是怎么配合 其中呢,也会介绍 我们TI针对每一种应用场景
所推出来的一些参考设计
那么,我们现在将毫米波 雷达在汽车上的应用
大致可分成四个方向。 第一个方向呢是
第一个方向角雷达
角雷达呢就是我们现在常见的 把这个雷达的安装在
车辆的前后的四个角上的 一般它的典型的应用场景呢
像车载的盲区检测像变道辅助
那么,这些雷达呢,我们可以看到 在市场上现在可以看到非常多的
这样的一个产品有24g赫兹的 也有77g赫兹
因为角雷达呢 不涉及到车辆的主动控制
所以说呢 角雷达现在 市场上的产品呢
推出来的是非常多的。那么竞争 也非常激烈,那我们现在看到呢
角雷达的价格呢 在不断的下探 因此呢对于角雷达的应用场景
我们觉得产品的性价比 是现在最关键的一个指标
那么在这里呢 就会强调到我们 刚才介绍的TI的 1642 和 1843 的
是一个集成度非常高,同时性价价格呢, 也非常有优势的
一个单芯片的毫米波雷达解决方案
进行角雷达的开发呢 可以给客户呢 提供 非常多非常强
产品的竞争力
不仅是设计更简单而且 我们的整个产品的(听不清)
也会更加更加低。
那么 第二个方向呢就是 高性能的前向雷达
前向雷达,现在我们可以看到呢
现在主要的供应商呢, 还是国外的像 abcd 这样几家大的
这样的一个厂商 那么前向雷达呢 它要求探测雷达的探测距离
更远 角度 精度和角度分辨率呢更高
那么 同时呢 前向雷达 在实际使用的过程当中呢
往往需要和车辆的 主动控制系统比如说
像刹车这样的系统的配合起来
因此呢 前向雷达呢 对整个雷达的性能要求是非常高
那么 在这里呢就会 关联到我们在前面讲,
我TI的 1243, 可以支持多片级联
通过多片级联之后呢 我们可以让雷达看得更远
比如说我们通过四片级联可以 达到最远 350 米的这样一个探测距离
同时呢,也可以让雷达的 角度分辨率呢 做得更高
那么在四片级联底下呢, 我们会达到小于一度的这样的
角度的分辨率和角度的精度 那么 我们这里TI的 1243 多变级联方案
就非常适合于那些对性能要求 非常高的前向雷达的场景
第三款雷达呢,是和停车相关的雷达
停车呢,我们讲过的在 现在的停车的传感器当中呢
超声波是占主体的 那么后面呢, 我们也会给大家介绍
毫米波雷达相对于 超声波有很大的优势
我们很多的客户呢 现在正在研究 将毫米波雷达应用在停车系统当中
去取代超声波 那么第 4大块呢
是我们一些比较新的 把毫米波雷达呢
应用在车内的一些应用的情况
如说像驾驶员的心跳和 呼吸检测车内的成员检测
还有手势识别这样一些场景, 那么,我们下面呢,
都会给大家介绍到
上面的介绍呢,主要是针对我们刚才 前面讲到的这些应用场景以及TI
对应的一些参考设计, 给大家形象地展示一下我们的
毫米波雷达技术呢 是怎么应用在现在的汽车行业当中
那么,第一款参考设计呢, 是利用我们的 a w r的 1642
开发的一个叫短距雷达的 这样的一个参考设计
我们前面讲到过我们的 1642 是一个单芯片的集成方案
非常适合做车载的角雷达 那么,我们在这个参考设计当中呢
这个参考设计的名字是叫 TIDEP 0092
这是它编号 参考设计的名字就叫 short range radar
在这个参考设计当中呢 我们将 一个TI的 1642 的
这样的开发板放置在了 车子的这个前保险杠上
然后呢,在我们的高速公路上 去行驶 同时呢 我们在这个 1642
当中呢开发了一个完整的雷达
信号处理和目标跟踪 检测的这样的一个信号链
那么在这个配置当中呢 这个 SRRdemo参考这个设计当中呢
我们有支持有两种雷达的工作模式 第一种呢是80到 100 米的远距模式
第二种呢 是二十米的近距模式 在远距模式底下呢
我们的探测距离可以最远达到 120 米
我们的这个视角呢 这个 雷达的视角呢会窄一些
那么第二种呢,是在二十米的 近距模式底下我的雷达的探测
距离虽然很近, 但是我们的视角会更宽
同时呢,我的雷达的 分辨率会更高
那么左边的这两张图呢,就是分别 对应的刚才讲到的这两种参照模式呢
我们的测试结果, 我们可以看到上面这张图呢
就是在远距模式底下我们对车辆的 测试情况 最远呢可以测到 120 米的车辆
下面的这张图呢,是我们在 二十米近距模式底下我们可以看到的
在近距模式底下呢, 我们的雷达的分辨率可以做得很高
比如说我们可以看到这个高速公路 旁边的这样的一个围墙
我们可以看到前方的各个车辆的这样的一些形状 那么可以在雷达的车子前方
形成一个叫free room 也就是我们这个车辆呢
可以在行驶的这样的一个区间
我们这个参考设计的呢 所有的软件和硬件设计的资料呢
都可以在TI的网站上下载到
我这个今天的介绍到最后呢 会给大家提供一下这个下载的地址
第二个参考设计呢, 跟前面这个非常接近
但是呢,它是在我们的更新一代的 就是 a w r1843 上面开发的
我们把它定义 mid range radar
也就是一个中距雷达的应用场景 那么 1642 呢,主要的应用范围呢
是车载的角雷达。 那么 1843 呢 刚才介绍
因为它的功能更强 它多了一个发射 天线 同时信号处理能力
内存都更大,所以说 1843 呢 可以做150 m到200m探测范围之内的
一些中距离的雷达不光是包括角雷达 还可以做一些前向的雷达
那么在我们的这个测试呢, 参考设计当中
就是MRR这个参考设计当中呢 我们就把这个 1843 EVM板放在
放在车子的前方 然后基本的算法呢跟刚才讲过 1642
参考设计呢基本上比较类似 但是呢 它做了一些性能增强
那么,在前向的模式底下呢 我们可以看到最远 150 米的车辆
刚才讲过了 1642 是 120 米 那么在近距离的模式底下呢
因为我的雷达的分辨率更高了 我们可以检测出来就像我们这个
雷达在正对前方的一个停车场 有这个围栏以及后面的一些大的电缆
卷的时候呢 我们可以 看到一些完整的点云信息
同时呢, 1642 呢 因为多了一个发射天线
在我们的开发版当中呢我们把 一个发射天线呢布置在一个垂直的方向
所以说我不光可以去检测出来 雷达在水平方向的高角度
还可以检查出来雷达 在垂直方向的角度
我们可以形成一个 3d 也就是 垂直方向的这样的一个目标信息
就是在我刚才画的这个位置
第三个参考设计呢, 是关于我们停车领域的应用的
那么在停车领域呢 我们现在呢 有两个参考设计 分别针对
不同的应用。第一款呢 就是要针对于我们现在的叫做
自动停车系统那 我们在最近 看到很多关于无人驾驶
还有无人自动泊车的这样一个 应用场景 那么在停车的时候呢
如果是无人自动驾驶的停车呢, 在第一步呢我们要这个无人车
在停车场上面运动,在运动的时候呢 我们可以自主去找到当前可以停进去
这样的一个车位那么,这就是 TIDEP 01011 参考设计
所实现了一个场景, 我们将两个TI的雷达
分别装在了车子的左右两边那么 当车子在这个停车场运动的
这个轨迹运动的时候呢 我们可以检测出来车子
两边的这样一个轮廓和形状,那么在 这张图当中,我们可以看到
当你颜色比较深的这样的一些点 就是已经有车辆停进去的位置
那么,在另外一些比较空闲的 空白的这样的一些区域呢
就是当前可以停车的 这样的一个区域
那么,这个是针对于 未来的自动驾驶和自动停车
那么毫米波雷达呢 提供一个 非常高的这个实时成像的这个功能
第二个系统呢,就是说, 当我的这个车辆呢
找到了停车位之后呢我们希望 让车子呢能够自动的泊进去
那么现在在很多的车辆上面也有一个叫APA也叫自动泊车的一个系统
那么驾驶员只要按一个APA的 按键的车辆可以自动的泊进去
那么,现在的方案呢, 所使用的传感器主要是毫米波
主要是这个超声波方案, 那么是通过在车子的前后左右
布置十二个超声波的探头 行成一个APA 系统 超声波
相对于毫米波存在一些劣势
那么,首先, 因为超声波的视角比较窄
所以说呢,它很难覆盖大范围 那么在这张图当中
我们也看出来,尽管我的车子呢, 布置了十二个超声波探头
也还是没有办法对车辆 周边形成 360 度的环式覆盖
另外呢,超声波的探测 距离比较近。一般只能做到五米
同时呢,对于小于 十五米的目标呢
它存在检测盲区 这是因为 超声波这个探头的这个发播的
这个物理原理所导致
也就是说,当你的这个车辆呢, 靠得比较近的时候呢
小于十五厘米的 超声波的这个就会失效了
这会带来一些安全上的隐患
第三点呢,是因为我们的超声波呢 它没有办法去穿透
这个塑料件所以说呢 我们可以 看到在现在车子上面安装了
超声波探头的时候呢, 都需要在车辆的保险杠上面
进行打洞, 那这个对车辆的美观会造成影响
那毫米波雷达呢,就可以解决刚才我
所说的超声波这样的一些技术
那么首先,我们的毫米波雷达呢 我们的天线呢 可以进行分别
不同的设计可以形成一个 更加宽的FOV 那么
我只需要有六个到八个 毫米波雷达传感器呢
就可以对车辆进行一个 完整的 360 度的覆盖
第二个呢, 是我们的毫米波雷达的
因为我们现在的 每一个芯片的通道都非常多
我们可以使用一些通道呢 放在垂直方向上
那么,我就是不仅可以检测到这一个物体的水平的位置 还可以检测出来
它垂直的高度 那这个对于泊车来说
可以说是非常有帮助的
我第三点就是说 我们的这个毫米波雷达
因为我们的这个配置呢, 是非常灵活的
我们的多个天线之间 可以有一定的功能划分
也就是说 我用同样的这样的一个 雷达的硬件可以既支持到停车的
个应用场景 也可以支持到 其他的像盲点检测啊
这样,其他这个应用场景, 我们可以用一套硬件单元呢
实现了多种功能, 那这个是我们毫米波
这个是超声波所无法做到的
因为超声波呢,因为它的距离比较近,可能只能用在停车上面
第四个参考设计就是 我们前面刚才讲到的
我们有一个多片, 1243 级连在一起的 imagIng雷达的这样的一个应用场景
那这个通过将多片 1243级联连在一起之后呢
我们可以有形成一个 更多数量的一个天线的矩阵
比如说,在这里的这张图当中, 我们可以看到我们将四片 1243
放在了同一块板子上面
我们可以形成一个 十二根发射十六根接收的
12乘16的总共是 192 根 天线的这个虚拟阵列
那么天线数更多可以带来 很多的好处
首先是我们可以将多个发射天线的信号呢 在空间合成进行比波束赋形
我们可以将这样的好处呢,是可以 将发生在能量空间某个点集中起来
这样可以达到更远的探测距离
我们刚才讲过了在我们的四片1243
级联板子上面 最大的可以 实现了 350 米的探测距离
第二点呢,就是说因为我的 天线数通到更多了
那么,我们在使用10分或者码分的 这些Memo的应用场景当中
我的天线数通到更多 我可以 获得更高的分辨率
那么也就是说, 在雷达的这样一些近处呢
我们的这个雷达看到的物体 是更加清晰的
手机看
扫码用手机观看
 视频简介
视频简介
1. 1TI MMWave汽车传感器解决方案
所属课程:2019TI汽车电子月视频回看
发布时间:2019.05.15
视频集数:20
本节视频时长:00:35:36
TI 77GHz 毫米波雷达产品介绍和方案展示。




 未学习 1.1P-EV的框图
未学习 1.1P-EV的框图
 未学习 1.2PSR反激电路设计考虑因素
未学习 1.2PSR反激电路设计考虑因素
 未学习 1.3EV / HEV汽车-48V系统
未学习 1.3EV / HEV汽车-48V系统
 未学习 1.4LM5170平均电流模式
未学习 1.4LM5170平均电流模式
 未学习 1.1 边缘背光照明
未学习 1.1 边缘背光照明
 未学习 1.2 直接点亮背光
未学习 1.2 直接点亮背光
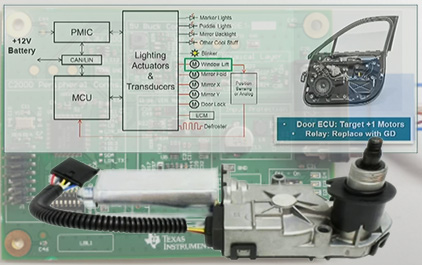 未学习 1.1汽车车身电机解决方案
未学习 1.1汽车车身电机解决方案
 未学习 1.2TI汽车车身电机解决方案(外部MOSFET)
未学习 1.2TI汽车车身电机解决方案(外部MOSFET)
 未学习 1.3TI汽车车身电机驱动器(集成FET)
未学习 1.3TI汽车车身电机驱动器(集成FET)
 未学习 1.4汽车多通道半桥(DRV89XX-Q1)
未学习 1.4汽车多通道半桥(DRV89XX-Q1)
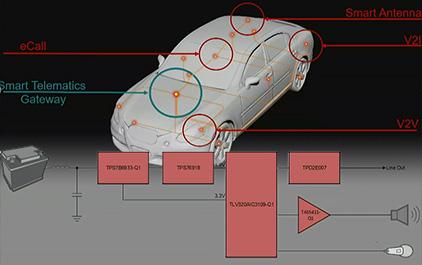 未学习 1.1T-BOX --- TI解决方案
未学习 1.1T-BOX --- TI解决方案
 未学习 1.2TI关键TBOX参考设计
未学习 1.2TI关键TBOX参考设计
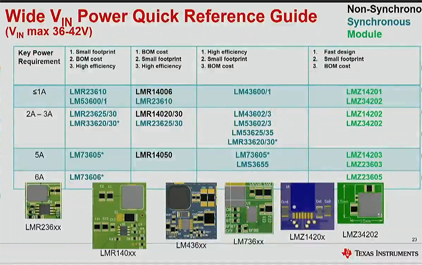 未学习 1.3宽输入电源快速参考指南
未学习 1.3宽输入电源快速参考指南
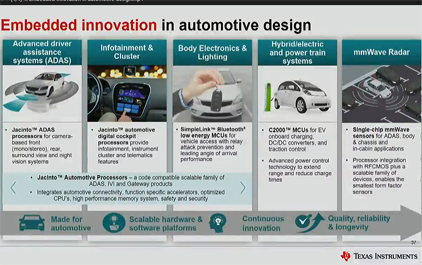 未学习 1.4汽车设计的嵌入式创新
未学习 1.4汽车设计的嵌入式创新
 未学习 1. 1TI MMWave汽车传感器解决方案
未学习 1. 1TI MMWave汽车传感器解决方案
 未学习 1.2使用高性能前端的成像雷达
未学习 1.2使用高性能前端的成像雷达
 未学习 1.1外部放大器的系统解决方案
未学习 1.1外部放大器的系统解决方案
 未学习 1.2电源树解决方案
未学习 1.2电源树解决方案
 未学习 1.3 ADC / AC和编解码器
未学习 1.3 ADC / AC和编解码器
 未学习 1.4功率放大器
未学习 1.4功率放大器




















