1.1P-EV的框图
Loading the player...
将在30s后自动为您播放下一课程
大家早上好 欢迎参加这次直播节目 我是来自德州仪器 中国汽车团队的F仪的Martin ma 那么在接下来的时间里就我为大家介绍EV HEV里面traction的一些相关知识 这是我们今天讲座主要的议程 分为以下五个部分 那首先让我们来看一看那个plug inEV的一个block diagrams 那在plug in EV的系统里面主要分为以下四个部分 那第一个部分的话是我们的on board charging 那第二个是我们的battery pack 那第三是我们的traction drive 那第四是我们的DCDC converter 那我们今天讲的相关知识主要是针对于traction drive这一块辅助电源 那同样这个知识的话其实也适用于在我们的on board charger的一些相关应用里面 那这是我们今天的一个在EV、HEV traction inverter里面主要能看到里面的一个challenges 那第一个的话主要就是说在汽车里面我们要进行一个重量的减少 包括一个更大空间 那在EV跟HEV里面能够让我们在同样的size里面塞入更多电池 保证我们的汽车有更多的续航里程 那第二个就是说我们这个bias power跟我们这个隔离的guide driver 在traction inverter里面其实也是一个很重要的组成部分 那第三个的话就是说对于我们汽车里面那很多应用里的话是 减少这个失效的风险包括我们提高我们系统安全的等级 那么也会希望我们从12伏进行取电 那再今天这个讲座里面的话我们就会对TI这个bias power 在这个traction inverter应用里面做一个总结 因为charging inverter本来就是一个复杂的系统 所以我们今天主要是针对这两部分进行一些深入的了解 那第二部分的话是高压到低压的power solution 那这一张的话大家可以看到就是我们在traction inverter的一张总的框图 那分为以下这几部分 那第一部分就我们的这个逻辑的DR供电的 那第二个部分是我们JGBE的这个tracking inverter 那相关的还有一些researcher跟一些信号的采样 那还要一部分就是我们今天所要讲到的这个 整个系统的一个供电的情况 刚刚讲的我们是那种高压到低压的 那TI在这方面的话那相关应用的话也适合于在我们的 on board charger里面 因为on board charger里面的也会有相应的一些bias power的应用 那所以讲了一些今天的相关知识点在这个on board charger里面也是非常实用的 大家可以看到这张的话是TI的一个design 01505 那么这是一个40伏到1000伏的一个bias power reference design 大家可以看到它的一个input的范围的话 是40伏到1000伏 那它这个适用范围是非常宽 那第二的话它的输出是15伏4mp60瓦的一个输出那么 适用于绝大多数的这个bias power的一个应用场合 那这张的话其实我们可以看到就是我们这个TI design的一个框图 主要分为以下几个部分 那第一个是说它需要一个比较好的start up的一个电路 因为它的input的话电压是从40伏到1000伏这个范围 所以需要一个单独start up的电路 那第二部分的话就是说是我们的这个传统的driver部分 那第三部分的话就是我们的这个反馈 那在我们汽车应用里面考虑到这个说明的应用 那有很多情况下它的这个feedback不需要用到光耦 那在我们TI design里面我们提供两种选择 那一种方式的话是将这个一种情况是由我们的光耦的反馈 那另外一种情况是将光耦去掉使用这个源边辅助绕组进行反馈 那得到一个稳定的输出电压 那这个是我们TI design的一些相关的spec跟test的一些项目 那输入的话主要是说40伏到1000伏 那可以支持1.2KV的transient 那输出的一个功运的话主要刚刚我们也讲了主要是65瓦max 效率的话是百分之八十五 那接下来的话大家可以看到 我们有一些相关的测试项目 那包括我的一个输出的波形的一个单调性 那还有说我的这个输出电压的一个纹波在静载和重载的情况下 那第三就是问我们的一个TI driver的一个波形跟switch node的一个波形 那其他的是包括像我们的一个效率 我的一个负载的调整率 然后包括我的一个动态的一个响应 包括我的一个control loop以及这个thermal 那相关的这些测试报告的话在我们TI design里面都相关测试的波形 以及数据 大家可以通过TI.COM去download我们这个TIDA-01505 那能够去看到相关的一个设计的一个细节 包括说我们的一些performance的一些测试报告 那今天其实主要跟大家highlight一下我的一个start up的电路 那大家知道我的input的电压是40伏到1kV 那对于我的这个UCC28C43来讲它的这个最压得VC是VDD电压是18伏 所以我们需要使用一个start up的电路来解决这个问题 那大家可以看到第一步的话通常情况下当我有一个高压产生的时候 我会通过这个线路 通过这个线路去打开Q1 那么对我的这个VDD进行充电 那当我的VDD充电到我们的门槛电压以后 那么我的这个整个电路进行齐正 那这时候的话我的winding就会提供能量 到达我的电压以后我会开动Q3那会取代我Q1的充电线路 那么同样我有这个产生一个电压以后我会去turn out我的Q2 那么去通过这种方式去关掉我的Q1 那么实现一个从高压启动到我的辅助winding供电的一个过程 那这个的话是我们高压启动一个比较重要的设计点 那对于这个UCC28C43大家可以看到这是一张典型flyback的这个应用线路 那通常情况下包含了刚刚我们提到的几部分 一个是我的这个电压器 那另外一个是我的这个driver 那包括我们刚刚讲的我的光耦进行一个feedback 那如果我的光耦取消以后我可以通过这种辅助winding 去提供我的这个反馈 一样的那我其实通过我的副边的winding也可以产生不同组的电压 或者是正负电压 那么所以说这个UCC28C43在整个这个bias power应用里面还是比较灵活多变的 那大家可以根据不同的应用场合 做一些改变以适应我们现场的一些具体的一个应用场合 那第三个百分是关于我们这个IGBT driver power solution 那今天我们主要看到的话就是说在我的这个IGBT 里面的话大家可以看到我们通常会使用三组的这种桥式IGBT 那通常的话对IGBT来讲它都需要一个正负的供电电压 那这个负电压的目的是为了加快这个IGBT的关掉速度 减少IGBT一个拖尾电流的问题 所以另外一个很重要bias power就是这一块的DCDC 他通常是通过这个我们的12伏电池进行供电 所以就是说为了提高整个系统的安全等级 大家可以看到这张是我们对有一个TIDA-020015 主要是针对一个GP driver reference design 那这个reference design的框目大家可以看到它主要是分为一个 reverse protection另外就是我们一个LM5180的一个适应框图 那大家可以看到我们这个5180相对于我的flyback来讲的话 其实大家可以看到我实际上已经节省了一个feedback的一个线路 那整个电路看起来是非常简捷的 所以对于大家设计我的IGBT driver的话 其实是非常简单的 那我们今天的话就是针对这个5180这个flyback来进行一个详细的说明 flyback的一个工作原理 那大家都可以看到这张在我这个左边是我这个整个开关的一个过程 那在我的右边是这个整个适应框图 那大家可以看到当我的第一步我的mouse fly turn on 的时候 那么我通过这个VIN对我的winding进行存储能量 那这时候我的圆面能量还没有传递到副边 那这副边的能量主要通过我的输出的电容 给我这个负载提供能量 那到达第二部mouse fly turn off以后那我的源边能量这时候大家可以看到 已经开始传递到副边 那这时候通过副边的winding 一部分是给我的电容充电 那另外一部分是给我的负载提供能量 那大家可以看到在这张图的话 如果是当我的能量传递完以后 我的mouse fly turn off还没有结束的时候 那我源边的电感会跟我的mouse fly 进行电容进行协整 那这时候呢我的输出的能量依然是靠我的输出电容去提供 那大家可以看到当我的源边的电感跟我mouse fly的启程电容协整的时候 它对应的波形就是这样一个部分 ok 所以在这个情况下的话 如果是说我的能量刚好接触以后 那么我会在turn off的时候 把电源关断 那如果是说在我的这个turn off的能量释放完以后 刚好到达这个点的话 那这个地方就是我们刚刚讲的一个boundary的状态 那接下来我们就将一下这个我们PSR flyback的一些控制策略 那BCM就是我们讲的boundary conduction mode 那DCM的话就是我们这种很传统在电源里面传讲的discontinuous conduction mode 那同样的还有一个continue conduction的我们称为CCM 就是我们刚刚上一页出现的 那在那个BCM switch on的时候呢 他这是就像就是说 由于当我的这一个电流是从零开始去增长的 那在这个时候就是说通常我们在电源里面会称为这一点叫ZCS 零电流开通 那好处会降低我这个开通的损耗 那当我这个switch turn off的时候呢 当我这个peak current到达我这个COMP比较电压的时候 那这时我就会去turn off 这个 那么另外一个就是说我们可以看到在后面的话 我们会有详细的介绍我的FSW就是我们开关频率会随着我负载的增加 会下降 那另外一个就是说我的PSR flyback还有一架DCM 那DCM的话其实大家可以考虑到可以看到就是说 当我的这个off 状态的时候我的副边电流开始传递能量的时候 当我的这个到零 那这时候我其实还没到我最大off time的时候 那我就是会实现一个协整的状态 那这时候大家看到就是我们讲的叫DCM mode的 那刚刚讲了一下我们这个PSR flyback的话跟我们传统的flyback做一个对比的话大家 其实可以很多的得到一个结论 就是说对于我们传统的flyback的话 他需要一个外部的这个光耦 进行一个feedback 或者是刚刚我们讲的它可以去掉一个辅助的winding flyback 那对于我们这个设计者来说的话我们需要去详细的设计我整个feedback的电路 那通常情况下的话它是工作在CCM mode的或者是 DCM 那大家可以看到对比左右两张图的话大家可以看到 明显的PSR flyback它的线路线会相对会非常简单 那其实我的feedback其实就是通过我的SW.进行一个feedback 那这样的话大家可以看到对比两张图的话我今天的feedback非常简单 那它的一个优点就是说没有了光耦 那么它主要时通过这个SW点击反馈 所以整个反馈电路会比较简单 那同样的所带来的一个好处就是 我的size会非常小 那它的操作状态的话就是刚刚我们讲了它主要在一个工作DCM mode或者boundary mode的 那这张的话其实大家如果去看我们这个5180frequency的话 可以看到这是一个我整个PSR的一个flyback的一个操作状态 那大家可以看到我的比如说我最大的电流是360mA 到我的电流到零的时候 我的整个的一个工作一个曲线 那大家看到横轴的话是我的一个工作的电流 那纵坐标的话是我的一个frequency 所以大家都可以看到我的这个5180它的整个工作状态是 当我由满载的时候 那么我工作在DCM mode 那我到达一定负载以后 那到达我最大的350k的一个工作频率的时候 那么我可以保证350k的工作频率不变 工作的DCM 那到达百分之二十的pike current的时候 我最后工作叫FF mode就是指的是 那如果这样的话大家可以看到就是说我整个一个工作频率的话 是一个变频的过程 ok 所以相对应的是说当我在最高负载的时候我的pike电流会到达 1.45mp那是我的一个限流值 那当我这个负载线下降的时候刚刚我们讲的就是说 负载下降的时候我会到达350k这个频率以后 那么这时我会继续的保证在350k进行负载降 那这时到达我的0.2pike电流的时候 我的这个工作频率 进行开始下降 那最小的工作频率我们设定在12k ok 那接下来可以给大家看一下我们整个工作过程的一个动图 那大家可以看到当我在满负载的时候 我这时候到达了我这个最大的ipeak电流 那这时工作在BCM mode的 ok 大家可以看到随着我的负载的降低的话 我的工作频率在慢慢的提升 然后我的ipeak电流在慢慢下降 那到达我的350k的点以后 还可以看到我们进BCM mode的 那这时候它的一个恒定量是说fix在350k工作频率 大家可以看到就是说我的频率可以慢慢的保持在一个稳定值 那我的ipeak的值慢慢降低 那降低到我的0.2mp的Ipeak以后那我工作在frequency flyback mode ok 这时候我的pike就会变淡 我的频率会慢慢往下降 那这就是一个我整个的一个从零负载到满载的时候整个品类的变化状态 大家可以总结一下我们在每一个状态的时候都有一个恒定量 那根据这个恒定量我们是可以通过一些数学的计算式 得到我们想要的一些参数 ok 那最小的工作频率的话 我们设定在12k主要是避免它频率降低 太低会产生一些输出噪音 那这个是我们实际工作的过程种看到的一个实际测试的波形 那这是一个DCM状态 那这是一个BCM的状态 那这是一个FF MODE的 所以对比下我们的那个DCM跟BCM的状态跟我们传统CCM的状态 大家可以看到 我的DCM跟BCM的一个好处在于说 我因为是通过名电流 开通 那另外一个就是说对于我副边级管大家都可以看到 刚刚看到我的那个电流是自然过零的 所以我的这个switch loss会比较小 那另外一个相对于我的CCM来说 我的这个变压器的源边感量 相对来说会比较小 那当然也带来一点缺点就是说我的电流 的ripple相对会比较大一点 那好处是说对于我一些简单的辅助电源设计的话 它的变压器的size会比较小 那么会导致我整个设计相对的size会比较小 那另外一点就是说因为我是DCM mode的 或者是BCM mode的 那么支持我的能量在每一个周期内都是放完的 所以对于我的系统来讲我是一个硬件系统 所以不需要一个斜坡补偿 那也没有一般平面隐面的问题 那坏处的话就是说因为我的ripple会比较大 所以它的conduction会比较高 另外一个就是说我的这个switch turn off的那个loss会比较大 那因为我的那个感量会比较小 那所以我的这个cut off也会稍微大一点 那当然刚刚我们讲的还有一个问题就是说我的整个工作过程的话 我的频率是变化的 所带来的问题就是说我的frequency我的频率是变化 那么可能对我的EMI滤波器的设计要求会比较高一些 那刚刚讲的我们在每一个工作过程的时候都会有fix的恒定量 那么通过这些恒定量其实我们很容易的讲我的这个duty 将我的duty 我的最高的pike电流我的开关频率 T off的时间跟我的输出的电流 都能够计算出来 那对于我的BCM来说的话 那我的一个就是说 T off就是等于一 那其实跟我的那个CCM的恒定量是类似的 那这时我可以根据这个公式去计算出我的BCM所有的一个状态 那对于我的DCM来讲的话 我的一个恒定量是 350k 那大家可以根据一个fix的就是这是一个恒定量 那可以跟着这个恒定量去计算这个DCM的状态 因为DCM的时候我的T off的话传递能量只在一段时间内 并不是在Toff的所有时间内进行传递能量 所以我们这时候需要用一个恒定量来进行相关的一些公式的计算 那同样的对于我的这歌FF mode的 frequency flyback mode的 那我主要的恒定量就是说我的FW的pike指数是0.29mA 那进行所有的公式计算 所以对于这个PSR flyback的所有公式 大家只要掌握出说我在工作过程中的一个恒定量 那么就可以把这些公式通过我们基本的一个伏秒和能量守衡的定律 推算出来 那这个地方我们就不跟大家一一去进行推算了 大家可以在线下的话根据我刚刚讲的这几个恒定量 去进行一个演算 那对于application来讲的话 就是说应用的话那它还有几个小的一个tips 那这一点就是说我可以去设定我的欠压保护点 那这是非常方便的应用 那另外一个的话我可以去调整我的5180的一个soft start时间 那第三点的话就是说我可以通过这个bias supply 给到我这个5180的供电 那这个好处就是说 当我的这歌5180工作以后 我可以通过这种Bias通电 那去disable LM5180内部的电源供电 提高我这个5180的这个工作效率
大家早上好 欢迎参加这次直播节目 我是来自德州仪器 中国汽车团队的F仪的Martin ma 那么在接下来的时间里就我为大家介绍EV HEV里面traction的一些相关知识 这是我们今天讲座主要的议程 分为以下五个部分 那首先让我们来看一看那个plug inEV的一个block diagrams 那在plug in EV的系统里面主要分为以下四个部分 那第一个部分的话是我们的on board charging 那第二个是我们的battery pack 那第三是我们的traction drive 那第四是我们的DCDC converter 那我们今天讲的相关知识主要是针对于traction drive这一块辅助电源 那同样这个知识的话其实也适用于在我们的on board charger的一些相关应用里面 那这是我们今天的一个在EV、HEV traction inverter里面主要能看到里面的一个challenges 那第一个的话主要就是说在汽车里面我们要进行一个重量的减少 包括一个更大空间 那在EV跟HEV里面能够让我们在同样的size里面塞入更多电池 保证我们的汽车有更多的续航里程 那第二个就是说我们这个bias power跟我们这个隔离的guide driver 在traction inverter里面其实也是一个很重要的组成部分 那第三个的话就是说对于我们汽车里面那很多应用里的话是 减少这个失效的风险包括我们提高我们系统安全的等级 那么也会希望我们从12伏进行取电 那再今天这个讲座里面的话我们就会对TI这个bias power 在这个traction inverter应用里面做一个总结 因为charging inverter本来就是一个复杂的系统 所以我们今天主要是针对这两部分进行一些深入的了解 那第二部分的话是高压到低压的power solution 那这一张的话大家可以看到就是我们在traction inverter的一张总的框图 那分为以下这几部分 那第一部分就我们的这个逻辑的DR供电的 那第二个部分是我们JGBE的这个tracking inverter 那相关的还有一些researcher跟一些信号的采样 那还要一部分就是我们今天所要讲到的这个 整个系统的一个供电的情况 刚刚讲的我们是那种高压到低压的 那TI在这方面的话那相关应用的话也适合于在我们的 on board charger里面 因为on board charger里面的也会有相应的一些bias power的应用 那所以讲了一些今天的相关知识点在这个on board charger里面也是非常实用的 大家可以看到这张的话是TI的一个design 01505 那么这是一个40伏到1000伏的一个bias power reference design 大家可以看到它的一个input的范围的话 是40伏到1000伏 那它这个适用范围是非常宽 那第二的话它的输出是15伏4mp60瓦的一个输出那么 适用于绝大多数的这个bias power的一个应用场合 那这张的话其实我们可以看到就是我们这个TI design的一个框图 主要分为以下几个部分 那第一个是说它需要一个比较好的start up的一个电路 因为它的input的话电压是从40伏到1000伏这个范围 所以需要一个单独start up的电路 那第二部分的话就是说是我们的这个传统的driver部分 那第三部分的话就是我们的这个反馈 那在我们汽车应用里面考虑到这个说明的应用 那有很多情况下它的这个feedback不需要用到光耦 那在我们TI design里面我们提供两种选择 那一种方式的话是将这个一种情况是由我们的光耦的反馈 那另外一种情况是将光耦去掉使用这个源边辅助绕组进行反馈 那得到一个稳定的输出电压 那这个是我们TI design的一些相关的spec跟test的一些项目 那输入的话主要是说40伏到1000伏 那可以支持1.2KV的transient 那输出的一个功运的话主要刚刚我们也讲了主要是65瓦max 效率的话是百分之八十五 那接下来的话大家可以看到 我们有一些相关的测试项目 那包括我的一个输出的波形的一个单调性 那还有说我的这个输出电压的一个纹波在静载和重载的情况下 那第三就是问我们的一个TI driver的一个波形跟switch node的一个波形 那其他的是包括像我们的一个效率 我的一个负载的调整率 然后包括我的一个动态的一个响应 包括我的一个control loop以及这个thermal 那相关的这些测试报告的话在我们TI design里面都相关测试的波形 以及数据 大家可以通过TI.COM去download我们这个TIDA-01505 那能够去看到相关的一个设计的一个细节 包括说我们的一些performance的一些测试报告 那今天其实主要跟大家highlight一下我的一个start up的电路 那大家知道我的input的电压是40伏到1kV 那对于我的这个UCC28C43来讲它的这个最压得VC是VDD电压是18伏 所以我们需要使用一个start up的电路来解决这个问题 那大家可以看到第一步的话通常情况下当我有一个高压产生的时候 我会通过这个线路 通过这个线路去打开Q1 那么对我的这个VDD进行充电 那当我的VDD充电到我们的门槛电压以后 那么我的这个整个电路进行齐正 那这时候的话我的winding就会提供能量 到达我的电压以后我会开动Q3那会取代我Q1的充电线路 那么同样我有这个产生一个电压以后我会去turn out我的Q2 那么去通过这种方式去关掉我的Q1 那么实现一个从高压启动到我的辅助winding供电的一个过程 那这个的话是我们高压启动一个比较重要的设计点 那对于这个UCC28C43大家可以看到这是一张典型flyback的这个应用线路 那通常情况下包含了刚刚我们提到的几部分 一个是我的这个电压器 那另外一个是我的这个driver 那包括我们刚刚讲的我的光耦进行一个feedback 那如果我的光耦取消以后我可以通过这种辅助winding 去提供我的这个反馈 一样的那我其实通过我的副边的winding也可以产生不同组的电压 或者是正负电压 那么所以说这个UCC28C43在整个这个bias power应用里面还是比较灵活多变的 那大家可以根据不同的应用场合 做一些改变以适应我们现场的一些具体的一个应用场合 那第三个百分是关于我们这个IGBT driver power solution 那今天我们主要看到的话就是说在我的这个IGBT 里面的话大家可以看到我们通常会使用三组的这种桥式IGBT 那通常的话对IGBT来讲它都需要一个正负的供电电压 那这个负电压的目的是为了加快这个IGBT的关掉速度 减少IGBT一个拖尾电流的问题 所以另外一个很重要bias power就是这一块的DCDC 他通常是通过这个我们的12伏电池进行供电 所以就是说为了提高整个系统的安全等级 大家可以看到这张是我们对有一个TIDA-020015 主要是针对一个GP driver reference design 那这个reference design的框目大家可以看到它主要是分为一个 reverse protection另外就是我们一个LM5180的一个适应框图 那大家可以看到我们这个5180相对于我的flyback来讲的话 其实大家可以看到我实际上已经节省了一个feedback的一个线路 那整个电路看起来是非常简捷的 所以对于大家设计我的IGBT driver的话 其实是非常简单的 那我们今天的话就是针对这个5180这个flyback来进行一个详细的说明 flyback的一个工作原理 那大家都可以看到这张在我这个左边是我这个整个开关的一个过程 那在我的右边是这个整个适应框图 那大家可以看到当我的第一步我的mouse fly turn on 的时候 那么我通过这个VIN对我的winding进行存储能量 那这时候我的圆面能量还没有传递到副边 那这副边的能量主要通过我的输出的电容 给我这个负载提供能量 那到达第二部mouse fly turn off以后那我的源边能量这时候大家可以看到 已经开始传递到副边 那这时候通过副边的winding 一部分是给我的电容充电 那另外一部分是给我的负载提供能量 那大家可以看到在这张图的话 如果是当我的能量传递完以后 我的mouse fly turn off还没有结束的时候 那我源边的电感会跟我的mouse fly 进行电容进行协整 那这时候呢我的输出的能量依然是靠我的输出电容去提供 那大家可以看到当我的源边的电感跟我mouse fly的启程电容协整的时候 它对应的波形就是这样一个部分 ok 所以在这个情况下的话 如果是说我的能量刚好接触以后 那么我会在turn off的时候 把电源关断 那如果是说在我的这个turn off的能量释放完以后 刚好到达这个点的话 那这个地方就是我们刚刚讲的一个boundary的状态 那接下来我们就将一下这个我们PSR flyback的一些控制策略 那BCM就是我们讲的boundary conduction mode 那DCM的话就是我们这种很传统在电源里面传讲的discontinuous conduction mode 那同样的还有一个continue conduction的我们称为CCM 就是我们刚刚上一页出现的 那在那个BCM switch on的时候呢 他这是就像就是说 由于当我的这一个电流是从零开始去增长的 那在这个时候就是说通常我们在电源里面会称为这一点叫ZCS 零电流开通 那好处会降低我这个开通的损耗 那当我这个switch turn off的时候呢 当我这个peak current到达我这个COMP比较电压的时候 那这时我就会去turn off 这个 那么另外一个就是说我们可以看到在后面的话 我们会有详细的介绍我的FSW就是我们开关频率会随着我负载的增加 会下降 那另外一个就是说我的PSR flyback还有一架DCM 那DCM的话其实大家可以考虑到可以看到就是说 当我的这个off 状态的时候我的副边电流开始传递能量的时候 当我的这个到零 那这时候我其实还没到我最大off time的时候 那我就是会实现一个协整的状态 那这时候大家看到就是我们讲的叫DCM mode的 那刚刚讲了一下我们这个PSR flyback的话跟我们传统的flyback做一个对比的话大家 其实可以很多的得到一个结论 就是说对于我们传统的flyback的话 他需要一个外部的这个光耦 进行一个feedback 或者是刚刚我们讲的它可以去掉一个辅助的winding flyback 那对于我们这个设计者来说的话我们需要去详细的设计我整个feedback的电路 那通常情况下的话它是工作在CCM mode的或者是 DCM 那大家可以看到对比左右两张图的话大家可以看到 明显的PSR flyback它的线路线会相对会非常简单 那其实我的feedback其实就是通过我的SW.进行一个feedback 那这样的话大家可以看到对比两张图的话我今天的feedback非常简单 那它的一个优点就是说没有了光耦 那么它主要时通过这个SW点击反馈 所以整个反馈电路会比较简单 那同样的所带来的一个好处就是 我的size会非常小 那它的操作状态的话就是刚刚我们讲了它主要在一个工作DCM mode或者boundary mode的 那这张的话其实大家如果去看我们这个5180frequency的话 可以看到这是一个我整个PSR的一个flyback的一个操作状态 那大家可以看到我的比如说我最大的电流是360mA 到我的电流到零的时候 我的整个的一个工作一个曲线 那大家看到横轴的话是我的一个工作的电流 那纵坐标的话是我的一个frequency 所以大家都可以看到我的这个5180它的整个工作状态是 当我由满载的时候 那么我工作在DCM mode 那我到达一定负载以后 那到达我最大的350k的一个工作频率的时候 那么我可以保证350k的工作频率不变 工作的DCM 那到达百分之二十的pike current的时候 我最后工作叫FF mode就是指的是 那如果这样的话大家可以看到就是说我整个一个工作频率的话 是一个变频的过程 ok 所以相对应的是说当我在最高负载的时候我的pike电流会到达 1.45mp那是我的一个限流值 那当我这个负载线下降的时候刚刚我们讲的就是说 负载下降的时候我会到达350k这个频率以后 那么这时我会继续的保证在350k进行负载降 那这时到达我的0.2pike电流的时候 我的这个工作频率 进行开始下降 那最小的工作频率我们设定在12k ok 那接下来可以给大家看一下我们整个工作过程的一个动图 那大家可以看到当我在满负载的时候 我这时候到达了我这个最大的ipeak电流 那这时工作在BCM mode的 ok 大家可以看到随着我的负载的降低的话 我的工作频率在慢慢的提升 然后我的ipeak电流在慢慢下降 那到达我的350k的点以后 还可以看到我们进BCM mode的 那这时候它的一个恒定量是说fix在350k工作频率 大家可以看到就是说我的频率可以慢慢的保持在一个稳定值 那我的ipeak的值慢慢降低 那降低到我的0.2mp的Ipeak以后那我工作在frequency flyback mode ok 这时候我的pike就会变淡 我的频率会慢慢往下降 那这就是一个我整个的一个从零负载到满载的时候整个品类的变化状态 大家可以总结一下我们在每一个状态的时候都有一个恒定量 那根据这个恒定量我们是可以通过一些数学的计算式 得到我们想要的一些参数 ok 那最小的工作频率的话 我们设定在12k主要是避免它频率降低 太低会产生一些输出噪音 那这个是我们实际工作的过程种看到的一个实际测试的波形 那这是一个DCM状态 那这是一个BCM的状态 那这是一个FF MODE的 所以对比下我们的那个DCM跟BCM的状态跟我们传统CCM的状态 大家可以看到 我的DCM跟BCM的一个好处在于说 我因为是通过名电流 开通 那另外一个就是说对于我副边级管大家都可以看到 刚刚看到我的那个电流是自然过零的 所以我的这个switch loss会比较小 那另外一个相对于我的CCM来说 我的这个变压器的源边感量 相对来说会比较小 那当然也带来一点缺点就是说我的电流 的ripple相对会比较大一点 那好处是说对于我一些简单的辅助电源设计的话 它的变压器的size会比较小 那么会导致我整个设计相对的size会比较小 那另外一点就是说因为我是DCM mode的 或者是BCM mode的 那么支持我的能量在每一个周期内都是放完的 所以对于我的系统来讲我是一个硬件系统 所以不需要一个斜坡补偿 那也没有一般平面隐面的问题 那坏处的话就是说因为我的ripple会比较大 所以它的conduction会比较高 另外一个就是说我的这个switch turn off的那个loss会比较大 那因为我的那个感量会比较小 那所以我的这个cut off也会稍微大一点 那当然刚刚我们讲的还有一个问题就是说我的整个工作过程的话 我的频率是变化的 所带来的问题就是说我的frequency我的频率是变化 那么可能对我的EMI滤波器的设计要求会比较高一些 那刚刚讲的我们在每一个工作过程的时候都会有fix的恒定量 那么通过这些恒定量其实我们很容易的讲我的这个duty 将我的duty 我的最高的pike电流我的开关频率 T off的时间跟我的输出的电流 都能够计算出来 那对于我的BCM来说的话 那我的一个就是说 T off就是等于一 那其实跟我的那个CCM的恒定量是类似的 那这时我可以根据这个公式去计算出我的BCM所有的一个状态 那对于我的DCM来讲的话 我的一个恒定量是 350k 那大家可以根据一个fix的就是这是一个恒定量 那可以跟着这个恒定量去计算这个DCM的状态 因为DCM的时候我的T off的话传递能量只在一段时间内 并不是在Toff的所有时间内进行传递能量 所以我们这时候需要用一个恒定量来进行相关的一些公式的计算 那同样的对于我的这歌FF mode的 frequency flyback mode的 那我主要的恒定量就是说我的FW的pike指数是0.29mA 那进行所有的公式计算 所以对于这个PSR flyback的所有公式 大家只要掌握出说我在工作过程中的一个恒定量 那么就可以把这些公式通过我们基本的一个伏秒和能量守衡的定律 推算出来 那这个地方我们就不跟大家一一去进行推算了 大家可以在线下的话根据我刚刚讲的这几个恒定量 去进行一个演算 那对于application来讲的话 就是说应用的话那它还有几个小的一个tips 那这一点就是说我可以去设定我的欠压保护点 那这是非常方便的应用 那另外一个的话我可以去调整我的5180的一个soft start时间 那第三点的话就是说我可以通过这个bias supply 给到我这个5180的供电 那这个好处就是说 当我的这歌5180工作以后 我可以通过这种Bias通电 那去disable LM5180内部的电源供电 提高我这个5180的这个工作效率
大家早上好 欢迎参加这次直播节目
我是来自德州仪器 中国汽车团队的F仪的Martin ma
那么在接下来的时间里就我为大家介绍EV HEV里面traction的一些相关知识
这是我们今天讲座主要的议程
分为以下五个部分
那首先让我们来看一看那个plug inEV的一个block diagrams
那在plug in EV的系统里面主要分为以下四个部分
那第一个部分的话是我们的on board charging
那第二个是我们的battery pack
那第三是我们的traction drive
那第四是我们的DCDC converter
那我们今天讲的相关知识主要是针对于traction drive这一块辅助电源
那同样这个知识的话其实也适用于在我们的on board charger的一些相关应用里面
那这是我们今天的一个在EV、HEV traction inverter里面主要能看到里面的一个challenges
那第一个的话主要就是说在汽车里面我们要进行一个重量的减少
包括一个更大空间 那在EV跟HEV里面能够让我们在同样的size里面塞入更多电池
保证我们的汽车有更多的续航里程
那第二个就是说我们这个bias power跟我们这个隔离的guide driver
在traction inverter里面其实也是一个很重要的组成部分
那第三个的话就是说对于我们汽车里面那很多应用里的话是
减少这个失效的风险包括我们提高我们系统安全的等级
那么也会希望我们从12伏进行取电
那再今天这个讲座里面的话我们就会对TI这个bias power
在这个traction inverter应用里面做一个总结
因为charging inverter本来就是一个复杂的系统
所以我们今天主要是针对这两部分进行一些深入的了解
那第二部分的话是高压到低压的power solution
那这一张的话大家可以看到就是我们在traction inverter的一张总的框图
那分为以下这几部分
那第一部分就我们的这个逻辑的DR供电的
那第二个部分是我们JGBE的这个tracking inverter
那相关的还有一些researcher跟一些信号的采样
那还要一部分就是我们今天所要讲到的这个
整个系统的一个供电的情况
刚刚讲的我们是那种高压到低压的
那TI在这方面的话那相关应用的话也适合于在我们的 on board charger里面
因为on board charger里面的也会有相应的一些bias power的应用
那所以讲了一些今天的相关知识点在这个on board charger里面也是非常实用的
大家可以看到这张的话是TI的一个design 01505
那么这是一个40伏到1000伏的一个bias power reference design
大家可以看到它的一个input的范围的话
是40伏到1000伏
那它这个适用范围是非常宽
那第二的话它的输出是15伏4mp60瓦的一个输出那么
适用于绝大多数的这个bias power的一个应用场合
那这张的话其实我们可以看到就是我们这个TI design的一个框图
主要分为以下几个部分
那第一个是说它需要一个比较好的start up的一个电路
因为它的input的话电压是从40伏到1000伏这个范围
所以需要一个单独start up的电路
那第二部分的话就是说是我们的这个传统的driver部分
那第三部分的话就是我们的这个反馈
那在我们汽车应用里面考虑到这个说明的应用
那有很多情况下它的这个feedback不需要用到光耦
那在我们TI design里面我们提供两种选择
那一种方式的话是将这个一种情况是由我们的光耦的反馈
那另外一种情况是将光耦去掉使用这个源边辅助绕组进行反馈
那得到一个稳定的输出电压
那这个是我们TI design的一些相关的spec跟test的一些项目
那输入的话主要是说40伏到1000伏
那可以支持1.2KV的transient
那输出的一个功运的话主要刚刚我们也讲了主要是65瓦max
效率的话是百分之八十五 那接下来的话大家可以看到
我们有一些相关的测试项目
那包括我的一个输出的波形的一个单调性
那还有说我的这个输出电压的一个纹波在静载和重载的情况下
那第三就是问我们的一个TI driver的一个波形跟switch node的一个波形
那其他的是包括像我们的一个效率
我的一个负载的调整率
然后包括我的一个动态的一个响应
包括我的一个control loop以及这个thermal
那相关的这些测试报告的话在我们TI design里面都相关测试的波形
以及数据 大家可以通过TI.COM去download我们这个TIDA-01505
那能够去看到相关的一个设计的一个细节
包括说我们的一些performance的一些测试报告
那今天其实主要跟大家highlight一下我的一个start up的电路
那大家知道我的input的电压是40伏到1kV
那对于我的这个UCC28C43来讲它的这个最压得VC是VDD电压是18伏
所以我们需要使用一个start up的电路来解决这个问题
那大家可以看到第一步的话通常情况下当我有一个高压产生的时候
我会通过这个线路
通过这个线路去打开Q1
那么对我的这个VDD进行充电
那当我的VDD充电到我们的门槛电压以后
那么我的这个整个电路进行齐正
那这时候的话我的winding就会提供能量
到达我的电压以后我会开动Q3那会取代我Q1的充电线路
那么同样我有这个产生一个电压以后我会去turn out我的Q2
那么去通过这种方式去关掉我的Q1
那么实现一个从高压启动到我的辅助winding供电的一个过程
那这个的话是我们高压启动一个比较重要的设计点
那对于这个UCC28C43大家可以看到这是一张典型flyback的这个应用线路
那通常情况下包含了刚刚我们提到的几部分
一个是我的这个电压器
那另外一个是我的这个driver
那包括我们刚刚讲的我的光耦进行一个feedback
那如果我的光耦取消以后我可以通过这种辅助winding
去提供我的这个反馈
一样的那我其实通过我的副边的winding也可以产生不同组的电压
或者是正负电压
那么所以说这个UCC28C43在整个这个bias power应用里面还是比较灵活多变的
那大家可以根据不同的应用场合
做一些改变以适应我们现场的一些具体的一个应用场合
那第三个百分是关于我们这个IGBT driver power solution
那今天我们主要看到的话就是说在我的这个IGBT
里面的话大家可以看到我们通常会使用三组的这种桥式IGBT
那通常的话对IGBT来讲它都需要一个正负的供电电压
那这个负电压的目的是为了加快这个IGBT的关掉速度
减少IGBT一个拖尾电流的问题
所以另外一个很重要bias power就是这一块的DCDC
他通常是通过这个我们的12伏电池进行供电
所以就是说为了提高整个系统的安全等级
大家可以看到这张是我们对有一个TIDA-020015
主要是针对一个GP driver reference design
那这个reference design的框目大家可以看到它主要是分为一个
reverse protection另外就是我们一个LM5180的一个适应框图
那大家可以看到我们这个5180相对于我的flyback来讲的话
其实大家可以看到我实际上已经节省了一个feedback的一个线路
那整个电路看起来是非常简捷的
所以对于大家设计我的IGBT driver的话
其实是非常简单的
那我们今天的话就是针对这个5180这个flyback来进行一个详细的说明
flyback的一个工作原理
那大家都可以看到这张在我这个左边是我这个整个开关的一个过程
那在我的右边是这个整个适应框图
那大家可以看到当我的第一步我的mouse fly turn on 的时候
那么我通过这个VIN对我的winding进行存储能量
那这时候我的圆面能量还没有传递到副边
那这副边的能量主要通过我的输出的电容
给我这个负载提供能量
那到达第二部mouse fly turn off以后那我的源边能量这时候大家可以看到
已经开始传递到副边
那这时候通过副边的winding
一部分是给我的电容充电
那另外一部分是给我的负载提供能量
那大家可以看到在这张图的话 如果是当我的能量传递完以后
我的mouse fly turn off还没有结束的时候 那我源边的电感会跟我的mouse fly
进行电容进行协整
那这时候呢我的输出的能量依然是靠我的输出电容去提供
那大家可以看到当我的源边的电感跟我mouse fly的启程电容协整的时候
它对应的波形就是这样一个部分
ok 所以在这个情况下的话
如果是说我的能量刚好接触以后 那么我会在turn off的时候
把电源关断
那如果是说在我的这个turn off的能量释放完以后
刚好到达这个点的话 那这个地方就是我们刚刚讲的一个boundary的状态
那接下来我们就将一下这个我们PSR flyback的一些控制策略
那BCM就是我们讲的boundary conduction mode
那DCM的话就是我们这种很传统在电源里面传讲的discontinuous conduction mode
那同样的还有一个continue conduction的我们称为CCM
就是我们刚刚上一页出现的
那在那个BCM switch on的时候呢
他这是就像就是说
由于当我的这一个电流是从零开始去增长的
那在这个时候就是说通常我们在电源里面会称为这一点叫ZCS
零电流开通
那好处会降低我这个开通的损耗
那当我这个switch turn off的时候呢 当我这个peak current到达我这个COMP比较电压的时候
那这时我就会去turn off 这个
那么另外一个就是说我们可以看到在后面的话
我们会有详细的介绍我的FSW就是我们开关频率会随着我负载的增加
会下降 那另外一个就是说我的PSR flyback还有一架DCM
那DCM的话其实大家可以考虑到可以看到就是说
当我的这个off 状态的时候我的副边电流开始传递能量的时候
当我的这个到零 那这时候我其实还没到我最大off time的时候
那我就是会实现一个协整的状态
那这时候大家看到就是我们讲的叫DCM mode的
那刚刚讲了一下我们这个PSR flyback的话跟我们传统的flyback做一个对比的话大家
其实可以很多的得到一个结论
就是说对于我们传统的flyback的话 他需要一个外部的这个光耦
进行一个feedback
或者是刚刚我们讲的它可以去掉一个辅助的winding flyback
那对于我们这个设计者来说的话我们需要去详细的设计我整个feedback的电路
那通常情况下的话它是工作在CCM mode的或者是
DCM 那大家可以看到对比左右两张图的话大家可以看到
明显的PSR flyback它的线路线会相对会非常简单
那其实我的feedback其实就是通过我的SW.进行一个feedback
那这样的话大家可以看到对比两张图的话我今天的feedback非常简单
那它的一个优点就是说没有了光耦
那么它主要时通过这个SW点击反馈
所以整个反馈电路会比较简单
那同样的所带来的一个好处就是
我的size会非常小
那它的操作状态的话就是刚刚我们讲了它主要在一个工作DCM mode或者boundary mode的
那这张的话其实大家如果去看我们这个5180frequency的话
可以看到这是一个我整个PSR的一个flyback的一个操作状态
那大家可以看到我的比如说我最大的电流是360mA
到我的电流到零的时候 我的整个的一个工作一个曲线
那大家看到横轴的话是我的一个工作的电流
那纵坐标的话是我的一个frequency
所以大家都可以看到我的这个5180它的整个工作状态是
当我由满载的时候 那么我工作在DCM mode
那我到达一定负载以后 那到达我最大的350k的一个工作频率的时候
那么我可以保证350k的工作频率不变
工作的DCM 那到达百分之二十的pike current的时候
我最后工作叫FF mode就是指的是
那如果这样的话大家可以看到就是说我整个一个工作频率的话
是一个变频的过程
ok 所以相对应的是说当我在最高负载的时候我的pike电流会到达
1.45mp那是我的一个限流值
那当我这个负载线下降的时候刚刚我们讲的就是说
负载下降的时候我会到达350k这个频率以后
那么这时我会继续的保证在350k进行负载降
那这时到达我的0.2pike电流的时候 我的这个工作频率
进行开始下降
那最小的工作频率我们设定在12k
ok 那接下来可以给大家看一下我们整个工作过程的一个动图
那大家可以看到当我在满负载的时候
我这时候到达了我这个最大的ipeak电流
那这时工作在BCM mode的
ok 大家可以看到随着我的负载的降低的话
我的工作频率在慢慢的提升 然后我的ipeak电流在慢慢下降
那到达我的350k的点以后 还可以看到我们进BCM mode的
那这时候它的一个恒定量是说fix在350k工作频率
大家可以看到就是说我的频率可以慢慢的保持在一个稳定值
那我的ipeak的值慢慢降低
那降低到我的0.2mp的Ipeak以后那我工作在frequency flyback mode
ok 这时候我的pike就会变淡 我的频率会慢慢往下降
那这就是一个我整个的一个从零负载到满载的时候整个品类的变化状态
大家可以总结一下我们在每一个状态的时候都有一个恒定量
那根据这个恒定量我们是可以通过一些数学的计算式
得到我们想要的一些参数
ok 那最小的工作频率的话 我们设定在12k主要是避免它频率降低
太低会产生一些输出噪音
那这个是我们实际工作的过程种看到的一个实际测试的波形
那这是一个DCM状态
那这是一个BCM的状态
那这是一个FF MODE的
所以对比下我们的那个DCM跟BCM的状态跟我们传统CCM的状态 大家可以看到
我的DCM跟BCM的一个好处在于说
我因为是通过名电流
开通 那另外一个就是说对于我副边级管大家都可以看到
刚刚看到我的那个电流是自然过零的
所以我的这个switch loss会比较小
那另外一个相对于我的CCM来说
我的这个变压器的源边感量
相对来说会比较小 那当然也带来一点缺点就是说我的电流
的ripple相对会比较大一点
那好处是说对于我一些简单的辅助电源设计的话
它的变压器的size会比较小
那么会导致我整个设计相对的size会比较小
那另外一点就是说因为我是DCM mode的
或者是BCM mode的
那么支持我的能量在每一个周期内都是放完的
所以对于我的系统来讲我是一个硬件系统
所以不需要一个斜坡补偿 那也没有一般平面隐面的问题
那坏处的话就是说因为我的ripple会比较大
所以它的conduction会比较高
另外一个就是说我的这个switch turn off的那个loss会比较大
那因为我的那个感量会比较小
那所以我的这个cut off也会稍微大一点
那当然刚刚我们讲的还有一个问题就是说我的整个工作过程的话
我的频率是变化的
所带来的问题就是说我的frequency我的频率是变化
那么可能对我的EMI滤波器的设计要求会比较高一些
那刚刚讲的我们在每一个工作过程的时候都会有fix的恒定量
那么通过这些恒定量其实我们很容易的讲我的这个duty
将我的duty 我的最高的pike电流我的开关频率
T off的时间跟我的输出的电流
都能够计算出来
那对于我的BCM来说的话
那我的一个就是说
T off就是等于一 那其实跟我的那个CCM的恒定量是类似的
那这时我可以根据这个公式去计算出我的BCM所有的一个状态
那对于我的DCM来讲的话 我的一个恒定量是
350k
那大家可以根据一个fix的就是这是一个恒定量
那可以跟着这个恒定量去计算这个DCM的状态
因为DCM的时候我的T off的话传递能量只在一段时间内
并不是在Toff的所有时间内进行传递能量
所以我们这时候需要用一个恒定量来进行相关的一些公式的计算
那同样的对于我的这歌FF mode的
frequency flyback mode的
那我主要的恒定量就是说我的FW的pike指数是0.29mA
那进行所有的公式计算
所以对于这个PSR flyback的所有公式
大家只要掌握出说我在工作过程中的一个恒定量
那么就可以把这些公式通过我们基本的一个伏秒和能量守衡的定律
推算出来
那这个地方我们就不跟大家一一去进行推算了
大家可以在线下的话根据我刚刚讲的这几个恒定量
去进行一个演算
那对于application来讲的话
就是说应用的话那它还有几个小的一个tips
那这一点就是说我可以去设定我的欠压保护点
那这是非常方便的应用
那另外一个的话我可以去调整我的5180的一个soft start时间
那第三点的话就是说我可以通过这个bias supply
给到我这个5180的供电
那这个好处就是说
当我的这歌5180工作以后 我可以通过这种Bias通电
那去disable LM5180内部的电源供电
提高我这个5180的这个工作效率
大家早上好 欢迎参加这次直播节目 我是来自德州仪器 中国汽车团队的F仪的Martin ma 那么在接下来的时间里就我为大家介绍EV HEV里面traction的一些相关知识 这是我们今天讲座主要的议程 分为以下五个部分 那首先让我们来看一看那个plug inEV的一个block diagrams 那在plug in EV的系统里面主要分为以下四个部分 那第一个部分的话是我们的on board charging 那第二个是我们的battery pack 那第三是我们的traction drive 那第四是我们的DCDC converter 那我们今天讲的相关知识主要是针对于traction drive这一块辅助电源 那同样这个知识的话其实也适用于在我们的on board charger的一些相关应用里面 那这是我们今天的一个在EV、HEV traction inverter里面主要能看到里面的一个challenges 那第一个的话主要就是说在汽车里面我们要进行一个重量的减少 包括一个更大空间 那在EV跟HEV里面能够让我们在同样的size里面塞入更多电池 保证我们的汽车有更多的续航里程 那第二个就是说我们这个bias power跟我们这个隔离的guide driver 在traction inverter里面其实也是一个很重要的组成部分 那第三个的话就是说对于我们汽车里面那很多应用里的话是 减少这个失效的风险包括我们提高我们系统安全的等级 那么也会希望我们从12伏进行取电 那再今天这个讲座里面的话我们就会对TI这个bias power 在这个traction inverter应用里面做一个总结 因为charging inverter本来就是一个复杂的系统 所以我们今天主要是针对这两部分进行一些深入的了解 那第二部分的话是高压到低压的power solution 那这一张的话大家可以看到就是我们在traction inverter的一张总的框图 那分为以下这几部分 那第一部分就我们的这个逻辑的DR供电的 那第二个部分是我们JGBE的这个tracking inverter 那相关的还有一些researcher跟一些信号的采样 那还要一部分就是我们今天所要讲到的这个 整个系统的一个供电的情况 刚刚讲的我们是那种高压到低压的 那TI在这方面的话那相关应用的话也适合于在我们的 on board charger里面 因为on board charger里面的也会有相应的一些bias power的应用 那所以讲了一些今天的相关知识点在这个on board charger里面也是非常实用的 大家可以看到这张的话是TI的一个design 01505 那么这是一个40伏到1000伏的一个bias power reference design 大家可以看到它的一个input的范围的话 是40伏到1000伏 那它这个适用范围是非常宽 那第二的话它的输出是15伏4mp60瓦的一个输出那么 适用于绝大多数的这个bias power的一个应用场合 那这张的话其实我们可以看到就是我们这个TI design的一个框图 主要分为以下几个部分 那第一个是说它需要一个比较好的start up的一个电路 因为它的input的话电压是从40伏到1000伏这个范围 所以需要一个单独start up的电路 那第二部分的话就是说是我们的这个传统的driver部分 那第三部分的话就是我们的这个反馈 那在我们汽车应用里面考虑到这个说明的应用 那有很多情况下它的这个feedback不需要用到光耦 那在我们TI design里面我们提供两种选择 那一种方式的话是将这个一种情况是由我们的光耦的反馈 那另外一种情况是将光耦去掉使用这个源边辅助绕组进行反馈 那得到一个稳定的输出电压 那这个是我们TI design的一些相关的spec跟test的一些项目 那输入的话主要是说40伏到1000伏 那可以支持1.2KV的transient 那输出的一个功运的话主要刚刚我们也讲了主要是65瓦max 效率的话是百分之八十五 那接下来的话大家可以看到 我们有一些相关的测试项目 那包括我的一个输出的波形的一个单调性 那还有说我的这个输出电压的一个纹波在静载和重载的情况下 那第三就是问我们的一个TI driver的一个波形跟switch node的一个波形 那其他的是包括像我们的一个效率 我的一个负载的调整率 然后包括我的一个动态的一个响应 包括我的一个control loop以及这个thermal 那相关的这些测试报告的话在我们TI design里面都相关测试的波形 以及数据 大家可以通过TI.COM去download我们这个TIDA-01505 那能够去看到相关的一个设计的一个细节 包括说我们的一些performance的一些测试报告 那今天其实主要跟大家highlight一下我的一个start up的电路 那大家知道我的input的电压是40伏到1kV 那对于我的这个UCC28C43来讲它的这个最压得VC是VDD电压是18伏 所以我们需要使用一个start up的电路来解决这个问题 那大家可以看到第一步的话通常情况下当我有一个高压产生的时候 我会通过这个线路 通过这个线路去打开Q1 那么对我的这个VDD进行充电 那当我的VDD充电到我们的门槛电压以后 那么我的这个整个电路进行齐正 那这时候的话我的winding就会提供能量 到达我的电压以后我会开动Q3那会取代我Q1的充电线路 那么同样我有这个产生一个电压以后我会去turn out我的Q2 那么去通过这种方式去关掉我的Q1 那么实现一个从高压启动到我的辅助winding供电的一个过程 那这个的话是我们高压启动一个比较重要的设计点 那对于这个UCC28C43大家可以看到这是一张典型flyback的这个应用线路 那通常情况下包含了刚刚我们提到的几部分 一个是我的这个电压器 那另外一个是我的这个driver 那包括我们刚刚讲的我的光耦进行一个feedback 那如果我的光耦取消以后我可以通过这种辅助winding 去提供我的这个反馈 一样的那我其实通过我的副边的winding也可以产生不同组的电压 或者是正负电压 那么所以说这个UCC28C43在整个这个bias power应用里面还是比较灵活多变的 那大家可以根据不同的应用场合 做一些改变以适应我们现场的一些具体的一个应用场合 那第三个百分是关于我们这个IGBT driver power solution 那今天我们主要看到的话就是说在我的这个IGBT 里面的话大家可以看到我们通常会使用三组的这种桥式IGBT 那通常的话对IGBT来讲它都需要一个正负的供电电压 那这个负电压的目的是为了加快这个IGBT的关掉速度 减少IGBT一个拖尾电流的问题 所以另外一个很重要bias power就是这一块的DCDC 他通常是通过这个我们的12伏电池进行供电 所以就是说为了提高整个系统的安全等级 大家可以看到这张是我们对有一个TIDA-020015 主要是针对一个GP driver reference design 那这个reference design的框目大家可以看到它主要是分为一个 reverse protection另外就是我们一个LM5180的一个适应框图 那大家可以看到我们这个5180相对于我的flyback来讲的话 其实大家可以看到我实际上已经节省了一个feedback的一个线路 那整个电路看起来是非常简捷的 所以对于大家设计我的IGBT driver的话 其实是非常简单的 那我们今天的话就是针对这个5180这个flyback来进行一个详细的说明 flyback的一个工作原理 那大家都可以看到这张在我这个左边是我这个整个开关的一个过程 那在我的右边是这个整个适应框图 那大家可以看到当我的第一步我的mouse fly turn on 的时候 那么我通过这个VIN对我的winding进行存储能量 那这时候我的圆面能量还没有传递到副边 那这副边的能量主要通过我的输出的电容 给我这个负载提供能量 那到达第二部mouse fly turn off以后那我的源边能量这时候大家可以看到 已经开始传递到副边 那这时候通过副边的winding 一部分是给我的电容充电 那另外一部分是给我的负载提供能量 那大家可以看到在这张图的话 如果是当我的能量传递完以后 我的mouse fly turn off还没有结束的时候 那我源边的电感会跟我的mouse fly 进行电容进行协整 那这时候呢我的输出的能量依然是靠我的输出电容去提供 那大家可以看到当我的源边的电感跟我mouse fly的启程电容协整的时候 它对应的波形就是这样一个部分 ok 所以在这个情况下的话 如果是说我的能量刚好接触以后 那么我会在turn off的时候 把电源关断 那如果是说在我的这个turn off的能量释放完以后 刚好到达这个点的话 那这个地方就是我们刚刚讲的一个boundary的状态 那接下来我们就将一下这个我们PSR flyback的一些控制策略 那BCM就是我们讲的boundary conduction mode 那DCM的话就是我们这种很传统在电源里面传讲的discontinuous conduction mode 那同样的还有一个continue conduction的我们称为CCM 就是我们刚刚上一页出现的 那在那个BCM switch on的时候呢 他这是就像就是说 由于当我的这一个电流是从零开始去增长的 那在这个时候就是说通常我们在电源里面会称为这一点叫ZCS 零电流开通 那好处会降低我这个开通的损耗 那当我这个switch turn off的时候呢 当我这个peak current到达我这个COMP比较电压的时候 那这时我就会去turn off 这个 那么另外一个就是说我们可以看到在后面的话 我们会有详细的介绍我的FSW就是我们开关频率会随着我负载的增加 会下降 那另外一个就是说我的PSR flyback还有一架DCM 那DCM的话其实大家可以考虑到可以看到就是说 当我的这个off 状态的时候我的副边电流开始传递能量的时候 当我的这个到零 那这时候我其实还没到我最大off time的时候 那我就是会实现一个协整的状态 那这时候大家看到就是我们讲的叫DCM mode的 那刚刚讲了一下我们这个PSR flyback的话跟我们传统的flyback做一个对比的话大家 其实可以很多的得到一个结论 就是说对于我们传统的flyback的话 他需要一个外部的这个光耦 进行一个feedback 或者是刚刚我们讲的它可以去掉一个辅助的winding flyback 那对于我们这个设计者来说的话我们需要去详细的设计我整个feedback的电路 那通常情况下的话它是工作在CCM mode的或者是 DCM 那大家可以看到对比左右两张图的话大家可以看到 明显的PSR flyback它的线路线会相对会非常简单 那其实我的feedback其实就是通过我的SW.进行一个feedback 那这样的话大家可以看到对比两张图的话我今天的feedback非常简单 那它的一个优点就是说没有了光耦 那么它主要时通过这个SW点击反馈 所以整个反馈电路会比较简单 那同样的所带来的一个好处就是 我的size会非常小 那它的操作状态的话就是刚刚我们讲了它主要在一个工作DCM mode或者boundary mode的 那这张的话其实大家如果去看我们这个5180frequency的话 可以看到这是一个我整个PSR的一个flyback的一个操作状态 那大家可以看到我的比如说我最大的电流是360mA 到我的电流到零的时候 我的整个的一个工作一个曲线 那大家看到横轴的话是我的一个工作的电流 那纵坐标的话是我的一个frequency 所以大家都可以看到我的这个5180它的整个工作状态是 当我由满载的时候 那么我工作在DCM mode 那我到达一定负载以后 那到达我最大的350k的一个工作频率的时候 那么我可以保证350k的工作频率不变 工作的DCM 那到达百分之二十的pike current的时候 我最后工作叫FF mode就是指的是 那如果这样的话大家可以看到就是说我整个一个工作频率的话 是一个变频的过程 ok 所以相对应的是说当我在最高负载的时候我的pike电流会到达 1.45mp那是我的一个限流值 那当我这个负载线下降的时候刚刚我们讲的就是说 负载下降的时候我会到达350k这个频率以后 那么这时我会继续的保证在350k进行负载降 那这时到达我的0.2pike电流的时候 我的这个工作频率 进行开始下降 那最小的工作频率我们设定在12k ok 那接下来可以给大家看一下我们整个工作过程的一个动图 那大家可以看到当我在满负载的时候 我这时候到达了我这个最大的ipeak电流 那这时工作在BCM mode的 ok 大家可以看到随着我的负载的降低的话 我的工作频率在慢慢的提升 然后我的ipeak电流在慢慢下降 那到达我的350k的点以后 还可以看到我们进BCM mode的 那这时候它的一个恒定量是说fix在350k工作频率 大家可以看到就是说我的频率可以慢慢的保持在一个稳定值 那我的ipeak的值慢慢降低 那降低到我的0.2mp的Ipeak以后那我工作在frequency flyback mode ok 这时候我的pike就会变淡 我的频率会慢慢往下降 那这就是一个我整个的一个从零负载到满载的时候整个品类的变化状态 大家可以总结一下我们在每一个状态的时候都有一个恒定量 那根据这个恒定量我们是可以通过一些数学的计算式 得到我们想要的一些参数 ok 那最小的工作频率的话 我们设定在12k主要是避免它频率降低 太低会产生一些输出噪音 那这个是我们实际工作的过程种看到的一个实际测试的波形 那这是一个DCM状态 那这是一个BCM的状态 那这是一个FF MODE的 所以对比下我们的那个DCM跟BCM的状态跟我们传统CCM的状态 大家可以看到 我的DCM跟BCM的一个好处在于说 我因为是通过名电流 开通 那另外一个就是说对于我副边级管大家都可以看到 刚刚看到我的那个电流是自然过零的 所以我的这个switch loss会比较小 那另外一个相对于我的CCM来说 我的这个变压器的源边感量 相对来说会比较小 那当然也带来一点缺点就是说我的电流 的ripple相对会比较大一点 那好处是说对于我一些简单的辅助电源设计的话 它的变压器的size会比较小 那么会导致我整个设计相对的size会比较小 那另外一点就是说因为我是DCM mode的 或者是BCM mode的 那么支持我的能量在每一个周期内都是放完的 所以对于我的系统来讲我是一个硬件系统 所以不需要一个斜坡补偿 那也没有一般平面隐面的问题 那坏处的话就是说因为我的ripple会比较大 所以它的conduction会比较高 另外一个就是说我的这个switch turn off的那个loss会比较大 那因为我的那个感量会比较小 那所以我的这个cut off也会稍微大一点 那当然刚刚我们讲的还有一个问题就是说我的整个工作过程的话 我的频率是变化的 所带来的问题就是说我的frequency我的频率是变化 那么可能对我的EMI滤波器的设计要求会比较高一些 那刚刚讲的我们在每一个工作过程的时候都会有fix的恒定量 那么通过这些恒定量其实我们很容易的讲我的这个duty 将我的duty 我的最高的pike电流我的开关频率 T off的时间跟我的输出的电流 都能够计算出来 那对于我的BCM来说的话 那我的一个就是说 T off就是等于一 那其实跟我的那个CCM的恒定量是类似的 那这时我可以根据这个公式去计算出我的BCM所有的一个状态 那对于我的DCM来讲的话 我的一个恒定量是 350k 那大家可以根据一个fix的就是这是一个恒定量 那可以跟着这个恒定量去计算这个DCM的状态 因为DCM的时候我的T off的话传递能量只在一段时间内 并不是在Toff的所有时间内进行传递能量 所以我们这时候需要用一个恒定量来进行相关的一些公式的计算 那同样的对于我的这歌FF mode的 frequency flyback mode的 那我主要的恒定量就是说我的FW的pike指数是0.29mA 那进行所有的公式计算 所以对于这个PSR flyback的所有公式 大家只要掌握出说我在工作过程中的一个恒定量 那么就可以把这些公式通过我们基本的一个伏秒和能量守衡的定律 推算出来 那这个地方我们就不跟大家一一去进行推算了 大家可以在线下的话根据我刚刚讲的这几个恒定量 去进行一个演算 那对于application来讲的话 就是说应用的话那它还有几个小的一个tips 那这一点就是说我可以去设定我的欠压保护点 那这是非常方便的应用 那另外一个的话我可以去调整我的5180的一个soft start时间 那第三点的话就是说我可以通过这个bias supply 给到我这个5180的供电 那这个好处就是说 当我的这歌5180工作以后 我可以通过这种Bias通电 那去disable LM5180内部的电源供电 提高我这个5180的这个工作效率
大家早上好 欢迎参加这次直播节目
我是来自德州仪器 中国汽车团队的F仪的Martin ma
那么在接下来的时间里就我为大家介绍EV HEV里面traction的一些相关知识
这是我们今天讲座主要的议程
分为以下五个部分
那首先让我们来看一看那个plug inEV的一个block diagrams
那在plug in EV的系统里面主要分为以下四个部分
那第一个部分的话是我们的on board charging
那第二个是我们的battery pack
那第三是我们的traction drive
那第四是我们的DCDC converter
那我们今天讲的相关知识主要是针对于traction drive这一块辅助电源
那同样这个知识的话其实也适用于在我们的on board charger的一些相关应用里面
那这是我们今天的一个在EV、HEV traction inverter里面主要能看到里面的一个challenges
那第一个的话主要就是说在汽车里面我们要进行一个重量的减少
包括一个更大空间 那在EV跟HEV里面能够让我们在同样的size里面塞入更多电池
保证我们的汽车有更多的续航里程
那第二个就是说我们这个bias power跟我们这个隔离的guide driver
在traction inverter里面其实也是一个很重要的组成部分
那第三个的话就是说对于我们汽车里面那很多应用里的话是
减少这个失效的风险包括我们提高我们系统安全的等级
那么也会希望我们从12伏进行取电
那再今天这个讲座里面的话我们就会对TI这个bias power
在这个traction inverter应用里面做一个总结
因为charging inverter本来就是一个复杂的系统
所以我们今天主要是针对这两部分进行一些深入的了解
那第二部分的话是高压到低压的power solution
那这一张的话大家可以看到就是我们在traction inverter的一张总的框图
那分为以下这几部分
那第一部分就我们的这个逻辑的DR供电的
那第二个部分是我们JGBE的这个tracking inverter
那相关的还有一些researcher跟一些信号的采样
那还要一部分就是我们今天所要讲到的这个
整个系统的一个供电的情况
刚刚讲的我们是那种高压到低压的
那TI在这方面的话那相关应用的话也适合于在我们的 on board charger里面
因为on board charger里面的也会有相应的一些bias power的应用
那所以讲了一些今天的相关知识点在这个on board charger里面也是非常实用的
大家可以看到这张的话是TI的一个design 01505
那么这是一个40伏到1000伏的一个bias power reference design
大家可以看到它的一个input的范围的话
是40伏到1000伏
那它这个适用范围是非常宽
那第二的话它的输出是15伏4mp60瓦的一个输出那么
适用于绝大多数的这个bias power的一个应用场合
那这张的话其实我们可以看到就是我们这个TI design的一个框图
主要分为以下几个部分
那第一个是说它需要一个比较好的start up的一个电路
因为它的input的话电压是从40伏到1000伏这个范围
所以需要一个单独start up的电路
那第二部分的话就是说是我们的这个传统的driver部分
那第三部分的话就是我们的这个反馈
那在我们汽车应用里面考虑到这个说明的应用
那有很多情况下它的这个feedback不需要用到光耦
那在我们TI design里面我们提供两种选择
那一种方式的话是将这个一种情况是由我们的光耦的反馈
那另外一种情况是将光耦去掉使用这个源边辅助绕组进行反馈
那得到一个稳定的输出电压
那这个是我们TI design的一些相关的spec跟test的一些项目
那输入的话主要是说40伏到1000伏
那可以支持1.2KV的transient
那输出的一个功运的话主要刚刚我们也讲了主要是65瓦max
效率的话是百分之八十五 那接下来的话大家可以看到
我们有一些相关的测试项目
那包括我的一个输出的波形的一个单调性
那还有说我的这个输出电压的一个纹波在静载和重载的情况下
那第三就是问我们的一个TI driver的一个波形跟switch node的一个波形
那其他的是包括像我们的一个效率
我的一个负载的调整率
然后包括我的一个动态的一个响应
包括我的一个control loop以及这个thermal
那相关的这些测试报告的话在我们TI design里面都相关测试的波形
以及数据 大家可以通过TI.COM去download我们这个TIDA-01505
那能够去看到相关的一个设计的一个细节
包括说我们的一些performance的一些测试报告
那今天其实主要跟大家highlight一下我的一个start up的电路
那大家知道我的input的电压是40伏到1kV
那对于我的这个UCC28C43来讲它的这个最压得VC是VDD电压是18伏
所以我们需要使用一个start up的电路来解决这个问题
那大家可以看到第一步的话通常情况下当我有一个高压产生的时候
我会通过这个线路
通过这个线路去打开Q1
那么对我的这个VDD进行充电
那当我的VDD充电到我们的门槛电压以后
那么我的这个整个电路进行齐正
那这时候的话我的winding就会提供能量
到达我的电压以后我会开动Q3那会取代我Q1的充电线路
那么同样我有这个产生一个电压以后我会去turn out我的Q2
那么去通过这种方式去关掉我的Q1
那么实现一个从高压启动到我的辅助winding供电的一个过程
那这个的话是我们高压启动一个比较重要的设计点
那对于这个UCC28C43大家可以看到这是一张典型flyback的这个应用线路
那通常情况下包含了刚刚我们提到的几部分
一个是我的这个电压器
那另外一个是我的这个driver
那包括我们刚刚讲的我的光耦进行一个feedback
那如果我的光耦取消以后我可以通过这种辅助winding
去提供我的这个反馈
一样的那我其实通过我的副边的winding也可以产生不同组的电压
或者是正负电压
那么所以说这个UCC28C43在整个这个bias power应用里面还是比较灵活多变的
那大家可以根据不同的应用场合
做一些改变以适应我们现场的一些具体的一个应用场合
那第三个百分是关于我们这个IGBT driver power solution
那今天我们主要看到的话就是说在我的这个IGBT
里面的话大家可以看到我们通常会使用三组的这种桥式IGBT
那通常的话对IGBT来讲它都需要一个正负的供电电压
那这个负电压的目的是为了加快这个IGBT的关掉速度
减少IGBT一个拖尾电流的问题
所以另外一个很重要bias power就是这一块的DCDC
他通常是通过这个我们的12伏电池进行供电
所以就是说为了提高整个系统的安全等级
大家可以看到这张是我们对有一个TIDA-020015
主要是针对一个GP driver reference design
那这个reference design的框目大家可以看到它主要是分为一个
reverse protection另外就是我们一个LM5180的一个适应框图
那大家可以看到我们这个5180相对于我的flyback来讲的话
其实大家可以看到我实际上已经节省了一个feedback的一个线路
那整个电路看起来是非常简捷的
所以对于大家设计我的IGBT driver的话
其实是非常简单的
那我们今天的话就是针对这个5180这个flyback来进行一个详细的说明
flyback的一个工作原理
那大家都可以看到这张在我这个左边是我这个整个开关的一个过程
那在我的右边是这个整个适应框图
那大家可以看到当我的第一步我的mouse fly turn on 的时候
那么我通过这个VIN对我的winding进行存储能量
那这时候我的圆面能量还没有传递到副边
那这副边的能量主要通过我的输出的电容
给我这个负载提供能量
那到达第二部mouse fly turn off以后那我的源边能量这时候大家可以看到
已经开始传递到副边
那这时候通过副边的winding
一部分是给我的电容充电
那另外一部分是给我的负载提供能量
那大家可以看到在这张图的话 如果是当我的能量传递完以后
我的mouse fly turn off还没有结束的时候 那我源边的电感会跟我的mouse fly
进行电容进行协整
那这时候呢我的输出的能量依然是靠我的输出电容去提供
那大家可以看到当我的源边的电感跟我mouse fly的启程电容协整的时候
它对应的波形就是这样一个部分
ok 所以在这个情况下的话
如果是说我的能量刚好接触以后 那么我会在turn off的时候
把电源关断
那如果是说在我的这个turn off的能量释放完以后
刚好到达这个点的话 那这个地方就是我们刚刚讲的一个boundary的状态
那接下来我们就将一下这个我们PSR flyback的一些控制策略
那BCM就是我们讲的boundary conduction mode
那DCM的话就是我们这种很传统在电源里面传讲的discontinuous conduction mode
那同样的还有一个continue conduction的我们称为CCM
就是我们刚刚上一页出现的
那在那个BCM switch on的时候呢
他这是就像就是说
由于当我的这一个电流是从零开始去增长的
那在这个时候就是说通常我们在电源里面会称为这一点叫ZCS
零电流开通
那好处会降低我这个开通的损耗
那当我这个switch turn off的时候呢 当我这个peak current到达我这个COMP比较电压的时候
那这时我就会去turn off 这个
那么另外一个就是说我们可以看到在后面的话
我们会有详细的介绍我的FSW就是我们开关频率会随着我负载的增加
会下降 那另外一个就是说我的PSR flyback还有一架DCM
那DCM的话其实大家可以考虑到可以看到就是说
当我的这个off 状态的时候我的副边电流开始传递能量的时候
当我的这个到零 那这时候我其实还没到我最大off time的时候
那我就是会实现一个协整的状态
那这时候大家看到就是我们讲的叫DCM mode的
那刚刚讲了一下我们这个PSR flyback的话跟我们传统的flyback做一个对比的话大家
其实可以很多的得到一个结论
就是说对于我们传统的flyback的话 他需要一个外部的这个光耦
进行一个feedback
或者是刚刚我们讲的它可以去掉一个辅助的winding flyback
那对于我们这个设计者来说的话我们需要去详细的设计我整个feedback的电路
那通常情况下的话它是工作在CCM mode的或者是
DCM 那大家可以看到对比左右两张图的话大家可以看到
明显的PSR flyback它的线路线会相对会非常简单
那其实我的feedback其实就是通过我的SW.进行一个feedback
那这样的话大家可以看到对比两张图的话我今天的feedback非常简单
那它的一个优点就是说没有了光耦
那么它主要时通过这个SW点击反馈
所以整个反馈电路会比较简单
那同样的所带来的一个好处就是
我的size会非常小
那它的操作状态的话就是刚刚我们讲了它主要在一个工作DCM mode或者boundary mode的
那这张的话其实大家如果去看我们这个5180frequency的话
可以看到这是一个我整个PSR的一个flyback的一个操作状态
那大家可以看到我的比如说我最大的电流是360mA
到我的电流到零的时候 我的整个的一个工作一个曲线
那大家看到横轴的话是我的一个工作的电流
那纵坐标的话是我的一个frequency
所以大家都可以看到我的这个5180它的整个工作状态是
当我由满载的时候 那么我工作在DCM mode
那我到达一定负载以后 那到达我最大的350k的一个工作频率的时候
那么我可以保证350k的工作频率不变
工作的DCM 那到达百分之二十的pike current的时候
我最后工作叫FF mode就是指的是
那如果这样的话大家可以看到就是说我整个一个工作频率的话
是一个变频的过程
ok 所以相对应的是说当我在最高负载的时候我的pike电流会到达
1.45mp那是我的一个限流值
那当我这个负载线下降的时候刚刚我们讲的就是说
负载下降的时候我会到达350k这个频率以后
那么这时我会继续的保证在350k进行负载降
那这时到达我的0.2pike电流的时候 我的这个工作频率
进行开始下降
那最小的工作频率我们设定在12k
ok 那接下来可以给大家看一下我们整个工作过程的一个动图
那大家可以看到当我在满负载的时候
我这时候到达了我这个最大的ipeak电流
那这时工作在BCM mode的
ok 大家可以看到随着我的负载的降低的话
我的工作频率在慢慢的提升 然后我的ipeak电流在慢慢下降
那到达我的350k的点以后 还可以看到我们进BCM mode的
那这时候它的一个恒定量是说fix在350k工作频率
大家可以看到就是说我的频率可以慢慢的保持在一个稳定值
那我的ipeak的值慢慢降低
那降低到我的0.2mp的Ipeak以后那我工作在frequency flyback mode
ok 这时候我的pike就会变淡 我的频率会慢慢往下降
那这就是一个我整个的一个从零负载到满载的时候整个品类的变化状态
大家可以总结一下我们在每一个状态的时候都有一个恒定量
那根据这个恒定量我们是可以通过一些数学的计算式
得到我们想要的一些参数
ok 那最小的工作频率的话 我们设定在12k主要是避免它频率降低
太低会产生一些输出噪音
那这个是我们实际工作的过程种看到的一个实际测试的波形
那这是一个DCM状态
那这是一个BCM的状态
那这是一个FF MODE的
所以对比下我们的那个DCM跟BCM的状态跟我们传统CCM的状态 大家可以看到
我的DCM跟BCM的一个好处在于说
我因为是通过名电流
开通 那另外一个就是说对于我副边级管大家都可以看到
刚刚看到我的那个电流是自然过零的
所以我的这个switch loss会比较小
那另外一个相对于我的CCM来说
我的这个变压器的源边感量
相对来说会比较小 那当然也带来一点缺点就是说我的电流
的ripple相对会比较大一点
那好处是说对于我一些简单的辅助电源设计的话
它的变压器的size会比较小
那么会导致我整个设计相对的size会比较小
那另外一点就是说因为我是DCM mode的
或者是BCM mode的
那么支持我的能量在每一个周期内都是放完的
所以对于我的系统来讲我是一个硬件系统
所以不需要一个斜坡补偿 那也没有一般平面隐面的问题
那坏处的话就是说因为我的ripple会比较大
所以它的conduction会比较高
另外一个就是说我的这个switch turn off的那个loss会比较大
那因为我的那个感量会比较小
那所以我的这个cut off也会稍微大一点
那当然刚刚我们讲的还有一个问题就是说我的整个工作过程的话
我的频率是变化的
所带来的问题就是说我的frequency我的频率是变化
那么可能对我的EMI滤波器的设计要求会比较高一些
那刚刚讲的我们在每一个工作过程的时候都会有fix的恒定量
那么通过这些恒定量其实我们很容易的讲我的这个duty
将我的duty 我的最高的pike电流我的开关频率
T off的时间跟我的输出的电流
都能够计算出来
那对于我的BCM来说的话
那我的一个就是说
T off就是等于一 那其实跟我的那个CCM的恒定量是类似的
那这时我可以根据这个公式去计算出我的BCM所有的一个状态
那对于我的DCM来讲的话 我的一个恒定量是
350k
那大家可以根据一个fix的就是这是一个恒定量
那可以跟着这个恒定量去计算这个DCM的状态
因为DCM的时候我的T off的话传递能量只在一段时间内
并不是在Toff的所有时间内进行传递能量
所以我们这时候需要用一个恒定量来进行相关的一些公式的计算
那同样的对于我的这歌FF mode的
frequency flyback mode的
那我主要的恒定量就是说我的FW的pike指数是0.29mA
那进行所有的公式计算
所以对于这个PSR flyback的所有公式
大家只要掌握出说我在工作过程中的一个恒定量
那么就可以把这些公式通过我们基本的一个伏秒和能量守衡的定律
推算出来
那这个地方我们就不跟大家一一去进行推算了
大家可以在线下的话根据我刚刚讲的这几个恒定量
去进行一个演算
那对于application来讲的话
就是说应用的话那它还有几个小的一个tips
那这一点就是说我可以去设定我的欠压保护点
那这是非常方便的应用
那另外一个的话我可以去调整我的5180的一个soft start时间
那第三点的话就是说我可以通过这个bias supply
给到我这个5180的供电
那这个好处就是说
当我的这歌5180工作以后 我可以通过这种Bias通电
那去disable LM5180内部的电源供电
提高我这个5180的这个工作效率
手机看
扫码用手机观看
 视频简介
视频简介
1.1P-EV的框图
所属课程:2019TI汽车电子月视频回看
发布时间:2019.05.15
视频集数:20
本节视频时长:00:26:26
本课程主要介绍汽车 EV/HEV 应用中 48V 系统解决方案及 Inverter 和 Motor control 系统的典型电源方案。



 未学习 1.1P-EV的框图
未学习 1.1P-EV的框图
 未学习 1.2PSR反激电路设计考虑因素
未学习 1.2PSR反激电路设计考虑因素
 未学习 1.3EV / HEV汽车-48V系统
未学习 1.3EV / HEV汽车-48V系统
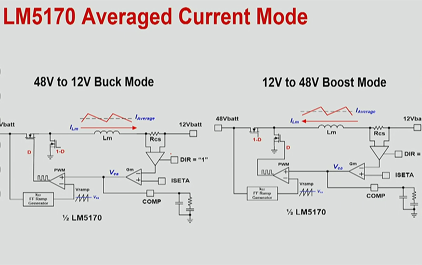 未学习 1.4LM5170平均电流模式
未学习 1.4LM5170平均电流模式
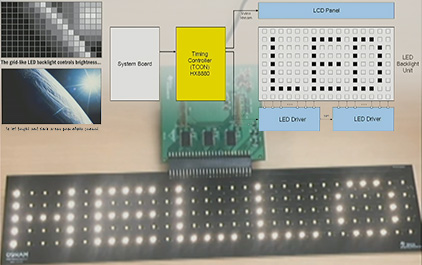 未学习 1.1 边缘背光照明
未学习 1.1 边缘背光照明
 未学习 1.2 直接点亮背光
未学习 1.2 直接点亮背光
 未学习 1.1汽车车身电机解决方案
未学习 1.1汽车车身电机解决方案
 未学习 1.2TI汽车车身电机解决方案(外部MOSFET)
未学习 1.2TI汽车车身电机解决方案(外部MOSFET)
 未学习 1.3TI汽车车身电机驱动器(集成FET)
未学习 1.3TI汽车车身电机驱动器(集成FET)
 未学习 1.4汽车多通道半桥(DRV89XX-Q1)
未学习 1.4汽车多通道半桥(DRV89XX-Q1)
 未学习 1.1T-BOX --- TI解决方案
未学习 1.1T-BOX --- TI解决方案
 未学习 1.2TI关键TBOX参考设计
未学习 1.2TI关键TBOX参考设计
 未学习 1.3宽输入电源快速参考指南
未学习 1.3宽输入电源快速参考指南
 未学习 1.4汽车设计的嵌入式创新
未学习 1.4汽车设计的嵌入式创新
 未学习 1. 1TI MMWave汽车传感器解决方案
未学习 1. 1TI MMWave汽车传感器解决方案
 未学习 1.2使用高性能前端的成像雷达
未学习 1.2使用高性能前端的成像雷达
 未学习 1.1外部放大器的系统解决方案
未学习 1.1外部放大器的系统解决方案
 未学习 1.2电源树解决方案
未学习 1.2电源树解决方案
 未学习 1.3 ADC / AC和编解码器
未学习 1.3 ADC / AC和编解码器
 未学习 1.4功率放大器
未学习 1.4功率放大器




















