MSP CapTIvate接近传感器的PCB设计指南
Loading the player...
将在30s后自动为您播放下一课程
采用 CapTIvate 技术的 MSP, 接近传感器的 基础 PCB 布局和 设计指南。 在此课程中, 我们将查看 设计采用 CapTIvate 技术的 电容触控解决方案期间使用的 一些基础 PCB 布局指南 和最佳做法。 通过遵照本课程 简述的指南, 您的设计有望 达到最佳水平的性能与 可靠性。 接近传感器 用于检测 是否存在 渐近的物体, 例如手指或手。 与需要适当的灵敏度 来可靠地检测表面上的 触控情况的 其他电容触控传感器相比, 接近传感器 需要更大的灵敏度 并且将其电场扩展到远远超过 触控表面的范围。 由于自电容传感器 通常提供 更大的灵敏度, 因此它们是接近传感器的 自然选择。 而且接近传感器 不必是单个电极, 例如图中红色所示的 传感器。 多个电极可以 配置为接近传感器, 以增加检测的面积 和范围。 借助于 CapTIvate, 接近传感器 是与硬件状态机 一起工作的完美传感器, 以在不需要 CPU 的情况下 建立接近检测机制。 一般来说, 当附近接地电势很小时, 接近传感器 运行情况最好。 这种情况 可实现 最大的灵敏度和范围。 然而,所有系统中 都存在接地,而且 通常很多。 因此,目标是 尽量减少 附近接地和 接地平面的数量, 因为它们会降低 传感器的 灵敏度和范围。 这成为了 设计 EMI 时 面临的特别问题, 因为在 EMI 中, 接地平面通常规定位于 顶层和底层上。 因此,必须在接近性 和 EMI 性能之间 确定 可接受的折衷。 为了说明接地对 接近传感器的影响, 针对传感器类型和 周围接地平面的 各种组合 收集了以下 测试数据。 不出所料, 没有周围接地平面的 传感器配置一和二 提供的范围最大。 在自电容传感器 具有较高灵敏度的情况下, 是否仍然可以 使用互电容接近传感器?完全可以。 接近传感器? 是这样。 在这种情况下,我们不想 遵守 RX 和 TX 之间的 建议间距, 并会 尽可能增大间距, 从而使电场尽可能远地 延伸到间距中。 存在限制。 在某些时候,您不能 击败物理定律, 只能 在电极不能正常工作之前 分离电极。 如果设计中 存在多个互电容 传感器, 则可以在软件中 同时激活 所有 TX 电极 和 RX 电极。 有点儿疯狂,但不妨试试。 在此培训课程中,我们为 CapTIvate 电容触控解决方案 提供了一些基础 PCB 设计指南。 具体来说,我们了解了 使用接近传感器的 应用的设计情况。 该培训课程 到此结束。
采用 CapTIvate 技术的 MSP, 接近传感器的 基础 PCB 布局和 设计指南。 在此课程中, 我们将查看 设计采用 CapTIvate 技术的 电容触控解决方案期间使用的 一些基础 PCB 布局指南 和最佳做法。 通过遵照本课程 简述的指南, 您的设计有望 达到最佳水平的性能与 可靠性。 接近传感器 用于检测 是否存在 渐近的物体, 例如手指或手。 与需要适当的灵敏度 来可靠地检测表面上的 触控情况的 其他电容触控传感器相比, 接近传感器 需要更大的灵敏度 并且将其电场扩展到远远超过 触控表面的范围。 由于自电容传感器 通常提供 更大的灵敏度, 因此它们是接近传感器的 自然选择。 而且接近传感器 不必是单个电极, 例如图中红色所示的 传感器。 多个电极可以 配置为接近传感器, 以增加检测的面积 和范围。 借助于 CapTIvate, 接近传感器 是与硬件状态机 一起工作的完美传感器, 以在不需要 CPU 的情况下 建立接近检测机制。 一般来说, 当附近接地电势很小时, 接近传感器 运行情况最好。 这种情况 可实现 最大的灵敏度和范围。 然而,所有系统中 都存在接地,而且 通常很多。 因此,目标是 尽量减少 附近接地和 接地平面的数量, 因为它们会降低 传感器的 灵敏度和范围。 这成为了 设计 EMI 时 面临的特别问题, 因为在 EMI 中, 接地平面通常规定位于 顶层和底层上。 因此,必须在接近性 和 EMI 性能之间 确定 可接受的折衷。 为了说明接地对 接近传感器的影响, 针对传感器类型和 周围接地平面的 各种组合 收集了以下 测试数据。 不出所料, 没有周围接地平面的 传感器配置一和二 提供的范围最大。 在自电容传感器 具有较高灵敏度的情况下, 是否仍然可以 使用互电容接近传感器?完全可以。 接近传感器? 是这样。 在这种情况下,我们不想 遵守 RX 和 TX 之间的 建议间距, 并会 尽可能增大间距, 从而使电场尽可能远地 延伸到间距中。 存在限制。 在某些时候,您不能 击败物理定律, 只能 在电极不能正常工作之前 分离电极。 如果设计中 存在多个互电容 传感器, 则可以在软件中 同时激活 所有 TX 电极 和 RX 电极。 有点儿疯狂,但不妨试试。 在此培训课程中,我们为 CapTIvate 电容触控解决方案 提供了一些基础 PCB 设计指南。 具体来说,我们了解了 使用接近传感器的 应用的设计情况。 该培训课程 到此结束。
采用 CapTIvate 技术的 MSP, 接近传感器的
基础 PCB 布局和 设计指南。
在此课程中, 我们将查看
设计采用 CapTIvate 技术的 电容触控解决方案期间使用的
一些基础 PCB 布局指南
和最佳做法。
通过遵照本课程 简述的指南,
您的设计有望 达到最佳水平的性能与
可靠性。
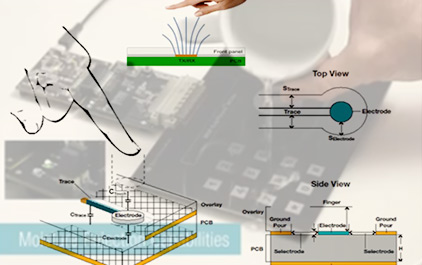
接近传感器 用于检测
是否存在 渐近的物体,
例如手指或手。
与需要适当的灵敏度 来可靠地检测表面上的
触控情况的 其他电容触控传感器相比,
接近传感器
需要更大的灵敏度 并且将其电场扩展到远远超过
触控表面的范围。
由于自电容传感器 通常提供
更大的灵敏度, 因此它们是接近传感器的
自然选择。
而且接近传感器 不必是单个电极,
例如图中红色所示的
传感器。
多个电极可以 配置为接近传感器,
以增加检测的面积 和范围。
借助于 CapTIvate, 接近传感器
是与硬件状态机 一起工作的完美传感器,
以在不需要 CPU 的情况下
建立接近检测机制。
一般来说, 当附近接地电势很小时,
接近传感器 运行情况最好。
这种情况 可实现
最大的灵敏度和范围。
然而,所有系统中 都存在接地,而且
通常很多。
因此,目标是 尽量减少
附近接地和 接地平面的数量,
因为它们会降低 传感器的
灵敏度和范围。
这成为了 设计 EMI 时
面临的特别问题, 因为在 EMI 中,
接地平面通常规定位于 顶层和底层上。
因此,必须在接近性 和 EMI 性能之间
确定 可接受的折衷。
为了说明接地对 接近传感器的影响,
针对传感器类型和 周围接地平面的
各种组合 收集了以下
测试数据。
不出所料, 没有周围接地平面的
传感器配置一和二
提供的范围最大。
在自电容传感器 具有较高灵敏度的情况下,
是否仍然可以 使用互电容接近传感器?完全可以。
接近传感器?
是这样。
在这种情况下,我们不想 遵守 RX 和 TX 之间的
建议间距, 并会
尽可能增大间距,
从而使电场尽可能远地 延伸到间距中。
存在限制。
在某些时候,您不能 击败物理定律,
只能 在电极不能正常工作之前
分离电极。
如果设计中 存在多个互电容
传感器, 则可以在软件中
同时激活 所有 TX 电极
和 RX 电极。
有点儿疯狂,但不妨试试。
在此培训课程中,我们为 CapTIvate 电容触控解决方案
提供了一些基础 PCB 设计指南。
具体来说,我们了解了 使用接近传感器的
应用的设计情况。
该培训课程 到此结束。
采用 CapTIvate 技术的 MSP, 接近传感器的 基础 PCB 布局和 设计指南。 在此课程中, 我们将查看 设计采用 CapTIvate 技术的 电容触控解决方案期间使用的 一些基础 PCB 布局指南 和最佳做法。 通过遵照本课程 简述的指南, 您的设计有望 达到最佳水平的性能与 可靠性。 接近传感器 用于检测 是否存在 渐近的物体, 例如手指或手。 与需要适当的灵敏度 来可靠地检测表面上的 触控情况的 其他电容触控传感器相比, 接近传感器 需要更大的灵敏度 并且将其电场扩展到远远超过 触控表面的范围。 由于自电容传感器 通常提供 更大的灵敏度, 因此它们是接近传感器的 自然选择。 而且接近传感器 不必是单个电极, 例如图中红色所示的 传感器。 多个电极可以 配置为接近传感器, 以增加检测的面积 和范围。 借助于 CapTIvate, 接近传感器 是与硬件状态机 一起工作的完美传感器, 以在不需要 CPU 的情况下 建立接近检测机制。 一般来说, 当附近接地电势很小时, 接近传感器 运行情况最好。 这种情况 可实现 最大的灵敏度和范围。 然而,所有系统中 都存在接地,而且 通常很多。 因此,目标是 尽量减少 附近接地和 接地平面的数量, 因为它们会降低 传感器的 灵敏度和范围。 这成为了 设计 EMI 时 面临的特别问题, 因为在 EMI 中, 接地平面通常规定位于 顶层和底层上。 因此,必须在接近性 和 EMI 性能之间 确定 可接受的折衷。 为了说明接地对 接近传感器的影响, 针对传感器类型和 周围接地平面的 各种组合 收集了以下 测试数据。 不出所料, 没有周围接地平面的 传感器配置一和二 提供的范围最大。 在自电容传感器 具有较高灵敏度的情况下, 是否仍然可以 使用互电容接近传感器?完全可以。 接近传感器? 是这样。 在这种情况下,我们不想 遵守 RX 和 TX 之间的 建议间距, 并会 尽可能增大间距, 从而使电场尽可能远地 延伸到间距中。 存在限制。 在某些时候,您不能 击败物理定律, 只能 在电极不能正常工作之前 分离电极。 如果设计中 存在多个互电容 传感器, 则可以在软件中 同时激活 所有 TX 电极 和 RX 电极。 有点儿疯狂,但不妨试试。 在此培训课程中,我们为 CapTIvate 电容触控解决方案 提供了一些基础 PCB 设计指南。 具体来说,我们了解了 使用接近传感器的 应用的设计情况。 该培训课程 到此结束。
采用 CapTIvate 技术的 MSP, 接近传感器的
基础 PCB 布局和 设计指南。
在此课程中, 我们将查看
设计采用 CapTIvate 技术的 电容触控解决方案期间使用的
一些基础 PCB 布局指南
和最佳做法。
通过遵照本课程 简述的指南,
您的设计有望 达到最佳水平的性能与
可靠性。
接近传感器 用于检测
是否存在 渐近的物体,
例如手指或手。
与需要适当的灵敏度 来可靠地检测表面上的
触控情况的 其他电容触控传感器相比,
接近传感器
需要更大的灵敏度 并且将其电场扩展到远远超过
触控表面的范围。
由于自电容传感器 通常提供
更大的灵敏度, 因此它们是接近传感器的
自然选择。
而且接近传感器 不必是单个电极,
例如图中红色所示的
传感器。
多个电极可以 配置为接近传感器,
以增加检测的面积 和范围。
借助于 CapTIvate, 接近传感器
是与硬件状态机 一起工作的完美传感器,
以在不需要 CPU 的情况下
建立接近检测机制。
一般来说, 当附近接地电势很小时,
接近传感器 运行情况最好。
这种情况 可实现
最大的灵敏度和范围。
然而,所有系统中 都存在接地,而且
通常很多。
因此,目标是 尽量减少
附近接地和 接地平面的数量,
因为它们会降低 传感器的
灵敏度和范围。
这成为了 设计 EMI 时
面临的特别问题, 因为在 EMI 中,
接地平面通常规定位于 顶层和底层上。
因此,必须在接近性 和 EMI 性能之间
确定 可接受的折衷。
为了说明接地对 接近传感器的影响,
针对传感器类型和 周围接地平面的
各种组合 收集了以下
测试数据。
不出所料, 没有周围接地平面的
传感器配置一和二
提供的范围最大。
在自电容传感器 具有较高灵敏度的情况下,
是否仍然可以 使用互电容接近传感器?完全可以。
接近传感器?
是这样。
在这种情况下,我们不想 遵守 RX 和 TX 之间的
建议间距, 并会
尽可能增大间距,
从而使电场尽可能远地 延伸到间距中。
存在限制。
在某些时候,您不能 击败物理定律,
只能 在电极不能正常工作之前
分离电极。
如果设计中 存在多个互电容
传感器, 则可以在软件中
同时激活 所有 TX 电极
和 RX 电极。
有点儿疯狂,但不妨试试。
在此培训课程中,我们为 CapTIvate 电容触控解决方案
提供了一些基础 PCB 设计指南。
具体来说,我们了解了 使用接近传感器的
应用的设计情况。
该培训课程 到此结束。
手机看
扫码用手机观看
 视频简介
视频简介
MSP CapTIvate接近传感器的PCB设计指南
所属课程:MSP CapTIvate自适应传感器PCB设计指南
发布时间:2019.03.11
视频集数:4
本节视频时长:00:03:02
良好的电容式传感器设计可以改善产品的HMI(人机界面)性能和稳健性。 本视频介绍了自电容的基本原理以及按钮,滑块和车轮传感器PCB布局的建议指南。



 未学习 MSP CapTIvate自适应传感器PCB设计指南
未学习 MSP CapTIvate自适应传感器PCB设计指南
 未学习 MSP Captivate互操作传感器PCB设计指南
未学习 MSP Captivate互操作传感器PCB设计指南
 未学习 MSP CapTIvate接近传感器的PCB设计指南
未学习 MSP CapTIvate接近传感器的PCB设计指南
 未学习 MSP CapTIvate耐水性和溢出检测的PCB设计指南
未学习 MSP CapTIvate耐水性和溢出检测的PCB设计指南




