
人工智能
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
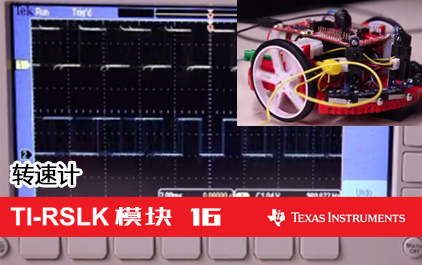

本实验的目的是连接码盘,
从而使机器人能够测量电机旋转速度。
对于本实验,您将需要
机器人和两个码盘。
该部分的目标是使用码盘
估算电机的时间常数。
稍后在下一个实验中,我们将在控制
系统中使用该速度。
在这里,我们有加载了实验
我要运行
您会注意到
我们还会使文本显示器运行。
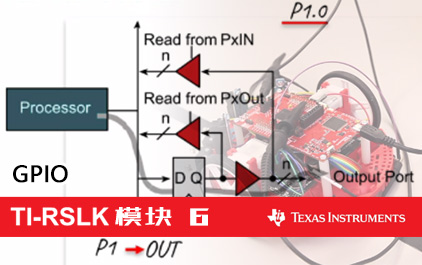
在软件中,这里的有趣部分是,
码盘会为您提供周期。
微控制器测量周期,计算速度,
并将该速度存储到缓冲器中,当我们
运行时它会在这里。
好的,说的够多了。
让我们开始运行。
那么,这里是机器人,那里是码盘。
码盘的两个编码器引脚
连接到示波器。
为了运行,我必须打开电源。
电源已经打开并为机器人供电。
在
那么它会经历
50%
但它这么做时,编码器会测量速度。
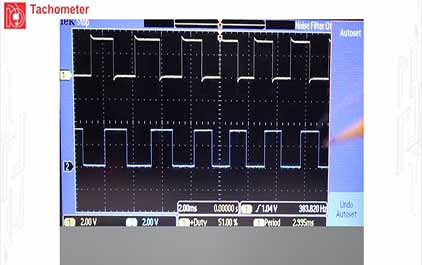
现在,在示波器上,如果我们获取单个点,我们
会看到有两个码盘,每个
码盘有两个波形。
我们将使用其中一个来测量速度,
对于另一个,我们实际上可以使用它
来测量方向。
现在,在调试器中,我们可以获取
一堆有关该速度随时间变化的波形。
因此我们可以看到,当我们将占空比从
或从
记录的是一个系列,它是该速度的时间函数。
现在,我要做的是捕获该数据,
将其粘贴到
那么,让我转到
这里是典型的结果。现在您可以在这里
看到的是,在本实验中,
占空比从
50%,速度作为时间的函数
由软件进行捕获。
那么,通过该数据,我们可以估算出
位于这些块上的该电机的时间常数
大约为
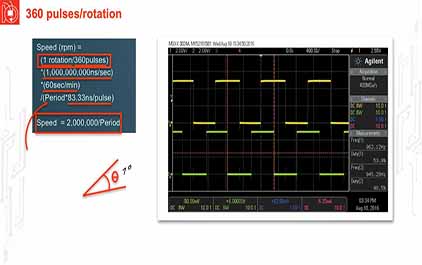
本实验中,您了解了如何使用输入
捕获来测量周期。
通过周期测量,我们可以计算出
轮子的旋转速度,以每秒的转数为单位。
设计有效且高效的控制器的第一步
是连接精确且快速的传感器。
码盘数据将允许您的
软件直行、行进规定的距离或
以规定的角度转弯。
祝您学得开心。
-
 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
-
 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
-
 未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度



