
有刷直流 (BDC) 电机驱动器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
Loading the player...




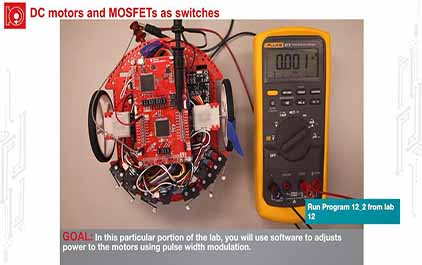
本实验的目的是将电机连接到 LaunchPad。 在本实验中,您将需要 LaunchPad、底盘、电源和电机驱动板、 两个电机以及两个轮子。 在本实验中, 我们将看到软件如何 通过 这里是实验环境,我已经加载了实验 我来向您展示我完成的工作。 我在这里使用了一个电流表,将它放在 两个电池的中间。 因此该电流表将在机器人 转动它的轮子时测量流出电池的电流。 很显然,它在该点流出。 我做的第二件事是将这里的示波器 连接到端口 我可以使用示波器 确保正确的占空比。 我们来打开它,好吗。 现在它在以 您可以看到大约是 现在它以 它的运行速度更快了,大约是 我将它调到 然后它将达到 然后它将后退。 请注意,电流没有继续升高。 电流先是升高,然后又降低。 但功率升高了,因为占空比 增加了。 好,让我们再做一次,观察占空比。 在示波器中,它显示该输出的频率 始终是 选择的该 电机能够响应的速度。 因此它不会随着 低电平启动和停止, 而是根据该波形的平均值进行旋转。 因此,占空比的平均值乘以电流, 再乘以电压,就是向电机提供的功率。 您要做的是创建有关功率输入和 速度输出的数据日志。 在本实验中,您看到了占空比、 电压、电流、功率和速度之间的关系。 在构建您自己的机器人时, 必须了解占空比、电压和电流对速度的共同作用。
本实验的目的是将电机连接到
LaunchPad。
在本实验中,您将需要
LaunchPad、底盘、电源和电机驱动板、
两个电机以及两个轮子。
在本实验中,
我们将看到软件如何
通过
这里是实验环境,我已经加载了实验
我来向您展示我完成的工作。
我在这里使用了一个电流表,将它放在
两个电池的中间。
因此该电流表将在机器人
转动它的轮子时测量流出电池的电流。
很显然,它在该点流出。
我做的第二件事是将这里的示波器
连接到端口
我可以使用示波器
确保正确的占空比。
我们来打开它,好吗。
现在它在以
您可以看到大约是
现在它以
它的运行速度更快了,大约是
我将它调到
然后它将达到
然后它将后退。
请注意,电流没有继续升高。
电流先是升高,然后又降低。
但功率升高了,因为占空比
增加了。
好,让我们再做一次,观察占空比。
在示波器中,它显示该输出的频率
始终是
选择的该
电机能够响应的速度。
因此它不会随着
低电平启动和停止,
而是根据该波形的平均值进行旋转。
因此,占空比的平均值乘以电流,
再乘以电压,就是向电机提供的功率。
您要做的是创建有关功率输入和
速度输出的数据日志。
在本实验中,您看到了占空比、
电压、电流、功率和速度之间的关系。
在构建您自己的机器人时,
必须了解占空比、电压和电流对速度的共同作用。
手机看
收藏本课程
扫码用手机观看
-
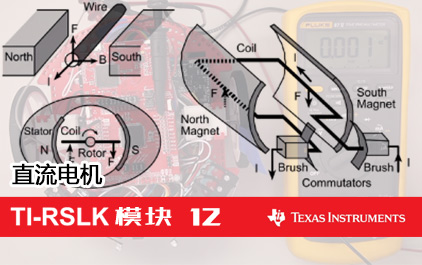
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动



 视频简介
视频简介
TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
所属课程:TI-RSLK 模块 12 - 直流电机
发布时间:2018.08.27
视频集数:4
本节视频时长:00:02:38
该实验的目的是将电机与LaunchPad相连接。

