
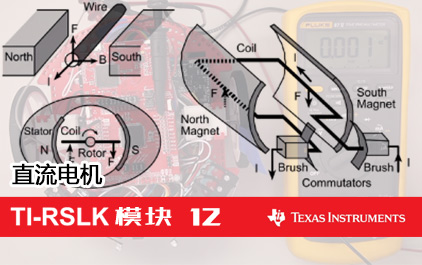
有刷直流 (BDC) 电机驱动器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口

大家好,我是
现在,是时候
在前一个视频中,我们讨论了
在前一个视频中,我们讨论了
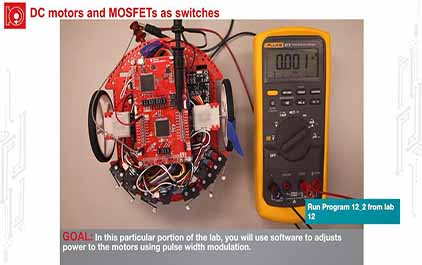
今天,我们将
把电机连接到
因为这是一项
有
几毫安的电流
因此,我们需要
把我们的直流电机
我们需要做两件事情,
一件是打开和关闭电机,
另外一件是使它向后移动,
因为机器人可能会撞到墙,
从而需要后退并沿着
因此,在本视频中,我们
因此,在本视频中,我们
您应该记得,上一节视频中,
我们尝试解决的主要问题是
我们尝试生成相当大的电流。
因此,驱动该电机所需的电流
可能大约为
而流出微控制器的电流
通常小于
因此,我们需要一个电流放大器,
以获得更大的电流。
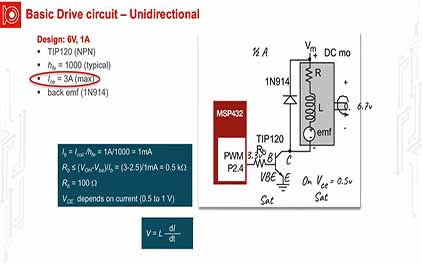
这是一个由达林顿管
第二个我们应该记得
我们不会通过调节
电机慢速、中速或快速旋转。
我们要做的是调节这里
因此,如果我想快速旋转,
此时占空比等于
如果要想以中等速度旋转,
如果我想慢速旋转,我将
因此,我将能够
来调节为该电机
这是一项相当简单的操作,
H/(H+L)
Vm
再乘以电流
电流
它是各种因素的函数。
我们将在下一张幻灯片中
总而言之,这是向
总而言之,这是向
软件可以调节参数
我们需要很大的电流。
好,让我们使用
构建第一个接口。
这里是基极,
这里是集电极,
这里是发射极。
我们要将该晶体管
我们要将该晶体管
或者完全关闭。
因此我们将经历两个阶段,
第一个阶段是,如果
它将生成足够的
它将生成足够的
这是饱和状态下的
来打开该晶体管。
我们将生成
打开时,它将生成大约
打开时,它将生成大约
这意味着,我们将
电压来使电机旋转。
这已经足够快了,
足以让电机旋转。
这里选择达林顿管,是为了
能够生成足够的电流
如果需要高达
必须确保管子足够大,
以满足该电流。
正如我在前一张幻灯片中说过的,
因此,它所做的是,
基极电流,并对它进行放大,
这实现了相当大的
那么,这里还剩的唯一
Rb
我们可以计算所需
换句话说,我将
输出高电平,
在这里,高电平电压
我要确定VBE
为了使管子达到饱和状态,
由于我需要
电路能够在
因此,我需要至少
因此,我需要至少
那么,这意味着我
500
然后,为了把它驱动至
将选择一个大小是它的
因此,我将在这里放置
关于晶体管设计的技巧在于,
我会一点一点地增大电流,
我会一点一点地增大电流,
以确保它达到饱和状态。
另一方面,当它关闭时,
当管子关闭时,其电压为零。
这将产生零安的基极电流,
该晶体管将关闭,
因此,ICE将为零。
现在,这实际上
因为如果我把
我将驱动0.5A
然后我要把它关闭。
管子关闭的过程只需几纳秒,
因此,这里的电流
降低至零。
由于电机中电感的存在,
由于电机中电感的存在,
因此,为了消除该电压,
需要在这里添加一个缓冲二极管。
我将在这里添加一个缓冲
请注意,不要与
正向
而反向
而反向
在电流突然关断时产生
因此,这里将产生一个
一个非常大的
二极管的任务是捕获该过冲
二极管的任务是捕获该过冲
好的,那么这就是达林顿电路,
如果您的机器人从不会撞到墙,
它相当简单,易于构建,易于测试。
达林顿管的一个低效之处在于,
产生了0.5V
因此,如果您想
如果您希望利用全部电压
你希望获取全部
驱动到电机中,就在这里,
我们可以使用一个
这是一个
这是栅极,
这是源极,
这是漏极。
MOSFET
当它打开时,这里的漏极-源极
当MOSFET打开时,这里的漏极-源极
但
它无法使用电流来驱动,
需要一个栅极-源极电压。
它需要栅极-源极电压才能打开。
实际上
实际上
因此,我们要做的是,
我们将从我们的电池
然后使用这里的普通
使得这里的电压要么为
要么为零(当BJT关断时)。
那么,让我们来实现该电路。
这正好是相对于
这正好是相对于
因此,如果微控制器
就像达林顿管那样,这将使
如果
MOSFET
根据我在这里选择的
我可能会获得
不过我们仅需要
但
让我们来看看另一半时间的情况,
如果我在这里输入
这里是基极,
我将得到
同时得到
那么,我将得到
该晶体管(BJT)现在将打开。
如果它打开,这里将有
如果它打开,这里将有
但该晶体管的
但该晶体管的
因此
因此
从而导致
现在,我可以通过
现在,我可以通过
但要记住必须使用负逻辑。
因此,MOSFET
同时,它们还可实现
那么,现在让我们
驱动电流的电路。
这是我们用的电机模型,
您应该记得它包含电阻、
电感和
这里是电机,
这里是相同的电机。
如果我想使用
类型的电路,那么我可以
这是电路看起来的样子,
也就是它内部的样子。
基本而言,
同时关闭
那么电流将沿这个方向流动,
沿那个方向流过电机。
相反,如果我关闭
同时打开
现在电流将沿这个方向流动。
Q3
是与刚才相反的方向。
那么通过这种特定接口,我可以
让电流向左或向右流动,
现在,它在这里用的
因此它仍具有
现在,电流可能会以各种
因此,我将在这里
以便在我沿一个方向
或者沿另一个方向
那么,L293
实际上需要四个二极管
来进行缓冲。
来进行缓冲。
这些是缓冲二极管。
这是一个相当简单的接口,
例如,如果我在这里输入
电流将向下流动。
如果我在这里输入0,
电流将向上流动。
因此,它是一个
如果您没有
从供应商处购买的电机驱动板,
它能够很好地工作。
不过,您将在达林顿管中
因此,您无法利用
现在,如果您想两全其美,
在电桥中使用
这是我们我们的目标。
我们将不使用达林顿管,
因为它在开关时产生了
我们将使用
它只会在开关中产生
但现在,我们面临这样一个问题:
那么,这是一个
那么,这是一个
这个特定的电路中
但是,如果我们在
需要强调的是,这是
所以,我们不使用
如果您确实需要
我们将使用集成的
这里是一个例子,
这是
我们将稍后再介绍。
但总而言之,它可以做四件事情,
我们感兴趣的是其中两件。
我可以打开这个和那个
让电流沿这个方向流动。
很显然,其他两个管子必须关闭,
我可以做的另外一件事是,
这些可以关闭,
其他两个可以打开。
如果我这么做,
它的有趣之处在于,如果愿意,
如果把它们全部关闭,它将变为零,
不会有任何电流进行流动。
因此,基本而言,我要做的是,
我可以控制方向和
换句话说,是使用圆圈中的
这将决定电机转动的方向。
然后,我将用另一条导线
以控制提供的
因此我可以通过这些
同时控制方向和速度,
而且效率相当高。
在这四个开关上仅有
在这四个开关上仅有
这是它在电机驱动板上的样子。
这是其中一个
实际上有两个
通过切断板上跳线可以使它们工作,
通过六个镍氢电池为电机供电,
通过六个镍氢电池为电机供电,
这是我的电机电压,
也就是用来驱动电机的电池电压。
芯片内部,有一个
电流将沿着这个方向
或另一个方向流动,具体
这里是决定方向的信号,
相位信号将决定方向。
另外我将在
输入振幅大小。
它(DRV8838)有一个
但我们不会使用这个模式。
因此,这里的引脚将处于
这不会把它置于睡眠模式,
因为该引脚是负逻辑信号。
因此,这里的
工作时的电流是相当大的,
这就是为什么我们要使用
电流流经这里后再
电流大小为
并沿另一方向向上流动,
并返回到接地。
总之,有相当大的电流
这就是我以前说过的,
基本上,如果您希望电机旋转,
这样可以激活电机驱动器,
这样(低电平)意味着关闭。
这个(使能)信号最终
它会是我们的
这是我们的
我们将提供一个固定频率、
我们将提供一个固定频率、
然后,另一个信号将
向前或向后。
这是从数据表中
我们来研究一下,
总体而言,它的响应速度很快,
总体而言,它的响应速度很快,
这些是数字信号,
这些数字信号来自于
下面将要标出的是电压,
(数字信号的)电压
(驱动信号的)电压
正如您看到的,如果这边(xOUT1)
电流将向下流动。
正如您看到的,如果这边(xOUT2)
电流将向上流动。
这就是我们要说的。
概括如下,
有两个电机,因此有两个
代码相当简单,
我要用这个相位信号来控制方向,
就是这个
它将决定每个电机转动的方向。
然后,我将使用该
然后,我将使用该
有两个电机,因此我可以
一旦您使用电机驱动板
一旦您使用电机驱动板
事实证明,方向信号
旋转两个轮子使
当方向信号为零时,
实际上相对于电机
实际上相对于电机
机器人本身还是会向前移动。
如果您把方向引脚设置为
在两种情况下,
换句话说,电机实际上
在低电平时停止。
这就是我们本节要讲的内容,
祝您“驾驶”愉快,
不要撞墙过猛。
用好我们的电机驱动器。
请记住,在电机上,
会有很大的电流。
我想它会是
测量过机器人撞到
它会增大很多。
在这一侧,我们
和很小的电压,
可以处理它。
H
H
希望您喜欢本实验。
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动




