
人工智能
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
Loading the player...
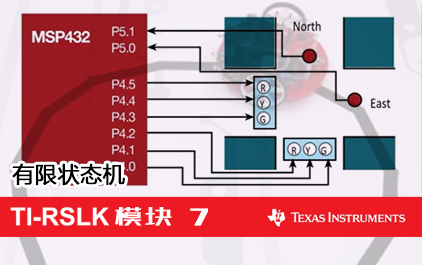

本实验的目的是 使用有限状态机 在本实验中, 在本实验中, 由于添加了状态机, 完全偏离了直线, 实验7的目的是 教你如果在Launchpad中实现状态机编程。 我要提醒您, 线传感器。 如果只按下开关 如果只按下开关 如果同时按下两个开关, 如果没有任何开关按下, 这里的 LED 这里亮起黄色表示前进。 如果亮起绿色,表示右转。 如果变为红色,表示左转。 我来向您演示一下 您还记得上一次 如果偏向这个方向 或者如果第一次偏向那个方向, 它现在就在黄色和绿色之间闪烁。 上一次当我松开时, 这次它一直亮起绿色。 我们再来做一次。 现在机器人跑起来了。 继续向前走。 它应该一直亮起绿色。 最后会停下来。 您可以看这里。 现在,有限状态机始终能够 准确地猜出它走到了 我只是要向您展示 我这里有一个真正的机器人。 我在 实际上就是实验 我现在有一个真正的线传感器 还有一个可以真正的驱动机器人的电机。 因此,我们在这里看到的是, 向右偏离,它将左转。 如果它向左偏离,它将右转。 这就是您在下一个 在本实验中,您观察了 有限状态机可用来 解决具有输入和输出的 任何类型的问题。 本实验在主程序中 但稍后我们要了解 定期运行有限状态机, 使系统可以执行多个任务。
本实验的目的是
使用有限状态机
在本实验中,
在本实验中,
由于添加了状态机,
完全偏离了直线,
实验7的目的是
教你如果在Launchpad中实现状态机编程。
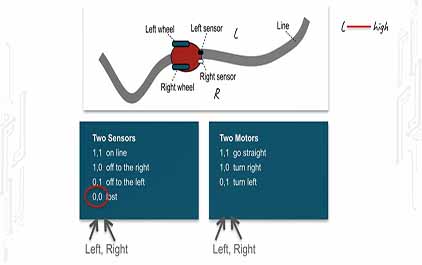
我要提醒您,
线传感器。
如果只按下开关
如果只按下开关
如果同时按下两个开关,
如果没有任何开关按下,
这里的
LED
这里亮起黄色表示前进。
如果亮起绿色,表示右转。
如果变为红色,表示左转。
我来向您演示一下
您还记得上一次
如果偏向这个方向
或者如果第一次偏向那个方向,
它现在就在黄色和绿色之间闪烁。
上一次当我松开时,
这次它一直亮起绿色。
我们再来做一次。
现在机器人跑起来了。
继续向前走。
它应该一直亮起绿色。
最后会停下来。
您可以看这里。
现在,有限状态机始终能够
准确地猜出它走到了
我只是要向您展示
我这里有一个真正的机器人。
我在
实际上就是实验
我现在有一个真正的线传感器
还有一个可以真正的驱动机器人的电机。
因此,我们在这里看到的是,
向右偏离,它将左转。
如果它向左偏离,它将右转。
这就是您在下一个
在本实验中,您观察了
有限状态机可用来
解决具有输入和输出的
任何类型的问题。
本实验在主程序中
但稍后我们要了解
定期运行有限状态机,
使系统可以执行多个任务。
手机看
收藏本课程
扫码用手机观看
-
 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
-
 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM



 视频简介
视频简介
TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
所属课程:TI-RSLK 模块 7 - 有限状态机
发布时间:2018.08.27
视频集数:4
本节视频时长:00:02:51
该实验的目的是利用有限状态机开发一个线路跟踪算法。

