
人工智能
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
Loading the player...





本实验的 如何设计基于 有限状态机。 在本实验中, 在本实验的中,您将会 观察到初始化有限 错误。 本实验中,您的目标是 以消除该错误。 让我来展示一下CCS。 对于有限状态机,每个状态 由3个元素组成。 它具有 每个状态都有一个延迟。 基于其2位输入, 它具有4个状态。 我们所使用的硬件,它不是 它是一个 但是,我们将假设 这些开关均是 因此,如果我们同时 这将意味着 如果仅按下 代表偏向左侧。 如果仅按下 代表偏向了右侧。 如果没有任何 现在没有电机, 但我们将使用 输出至电机的信号。 LED它有四种 因此,您可以在此处看到, 它将直走。 然后,如果偏向右侧, 可以看到LED变为 于是它将左转。 所以如果机器人偏向右侧, 如果我偏向左侧,但我希望右转。 因此绿色LED代表了右转。 但这样是存在错误的,看到了吗? 让我来展示一下。 有时,当我离线路线转向左侧时,它会变为红色。 它将进入 机器人偏向了左侧,但它仍然控制机器人进行左转。 因此,大约每隔一次 将会交替出现。 所以我们必须对 方法是向您的有限状态机 在本实验中,您观察了 有限状态机是可以 系统工具箱中的 祝您学得开心。 剪切. 今天的内容到此为止
本实验的
如何设计基于
有限状态机。
在本实验中,
在本实验的中,您将会
观察到初始化有限
错误。
本实验中,您的目标是
以消除该错误。
让我来展示一下CCS。
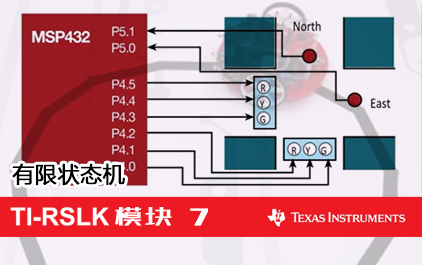
对于有限状态机,每个状态
由3个元素组成。
它具有
每个状态都有一个延迟。
基于其2位输入,
它具有4个状态。
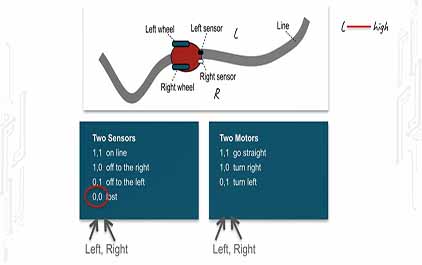
我们所使用的硬件,它不是
它是一个
但是,我们将假设
这些开关均是
因此,如果我们同时
这将意味着
如果仅按下
代表偏向左侧。
如果仅按下
代表偏向了右侧。
如果没有任何
现在没有电机,
但我们将使用
输出至电机的信号。
LED它有四种
因此,您可以在此处看到,
它将直走。
然后,如果偏向右侧,
可以看到LED变为
于是它将左转。
所以如果机器人偏向右侧,
如果我偏向左侧,但我希望右转。
因此绿色LED代表了右转。
但这样是存在错误的,看到了吗?
让我来展示一下。
有时,当我离线路线转向左侧时,它会变为红色。
它将进入
机器人偏向了左侧,但它仍然控制机器人进行左转。
因此,大约每隔一次
将会交替出现。
所以我们必须对
方法是向您的有限状态机
在本实验中,您观察了
有限状态机是可以
系统工具箱中的
祝您学得开心。
剪切.
今天的内容到此为止
手机看
收藏本课程
扫码用手机观看
-
 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
-
 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM



 视频简介
视频简介
TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
所属课程:TI-RSLK 模块 7 - 有限状态机
发布时间:2018.08.27
视频集数:4
本节视频时长:00:02:34
该实验的目的是学习如何设计一个基于有限状态机的微控制器。

