TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
Loading the player...
将在30s后自动为您播放下一课程
本实验的总体目标是 介绍RSLK机器人套件 所需的一些开发工具。 在本实验中, 您需将LaunchPad 连接到您的计算机。 然后我们将运行TExaS显示软件。 在本实验中, 您将学习用 逻辑分析仪衡量 数字信号作为时间的函数。 现在让我们开始吧。 当然,如果您有一个真正的 逻辑分析仪,应该使用它。 但如果没有的话, 您可以使用本例程的逻辑分析仪。 在本例中, 您看到 LaunchPad 通过 USB 连接到 计算机上。 让我来向您演示步骤。 这是 Code Composer Studio。 我要使用 TExaS来演示 德州显示器。 我刚刚选择了 逻辑分析仪主电源 作为加载的实际主电源。 为了初始化逻辑分析仪, 我们必须调用此接口 并将其作为参数传递。 如果我将此参数传递至显示软件, 它会将端口 1 设置为 逻辑分析仪。 换而言之,以每秒 10,000 次的频率 将端口 1 的 7 位数 传递至计算机进行绘图。 您可以看到,该程序 现在并没有做多少工作。 它获取来自开关的输入, 并设置延迟, 这取决于我是按下了 开关一还是开关二, 或是同时按下两个开关。 然后它将切换到 另一个引脚。 当它运行时,我们可以 看到端口 4 上 有三个引脚。 我们来构建它。 构建。 这是编译。 然后调试。 那是在擦除闪存, 下载代码。 它在启动调试器。 在本例中, 我们要启动程序。 我已经打开了显示软件按。 要使用它,第一步必须 连接它。 现在,如果您选择 0 作为 COM 端口, 它将为您进行搜索。 您无需在设备管理器中查找它。 因此我们要连接它。 现在它已经连接到我的 特定计算机的 COM 端口 7。 您的可能不太一样。 我们要选择 逻辑分析仪模式。 您看到这里是 逻辑分析仪模式。 它现在正在运行。 我可以在此处 看到配置。 我可以设置 我要查看的通道。 如果我要查看通道 0、1 和 4, 我可以那样做。 如果我要一个上升沿触发器, 我可以设置一个触发器。 现在我在此处看到的是 引脚 1 和引脚 4 上的 2 个输入和我的输出。 当我按下按钮时, 您将看到行为。 当我按下按钮时, 此处发生的行为是 它会更改频率。 如果我同时按下两个按钮, 它的频率非常慢。 您在底部可以看到 它将测量数字波形的 周期和占空比。 因此在本实验中, 我们学习了 如何调试逻辑分析仪。 能够实时观察输入和输出 是设计机器人所需的 一个重要任务。 祝您愉快。 76
本实验的总体目标是 介绍RSLK机器人套件 所需的一些开发工具。 在本实验中, 您需将LaunchPad 连接到您的计算机。 然后我们将运行TExaS显示软件。 在本实验中, 您将学习用 逻辑分析仪衡量 数字信号作为时间的函数。 现在让我们开始吧。 当然,如果您有一个真正的 逻辑分析仪,应该使用它。 但如果没有的话, 您可以使用本例程的逻辑分析仪。 在本例中, 您看到 LaunchPad 通过 USB 连接到 计算机上。 让我来向您演示步骤。 这是 Code Composer Studio。 我要使用 TExaS来演示 德州显示器。 我刚刚选择了 逻辑分析仪主电源 作为加载的实际主电源。 为了初始化逻辑分析仪, 我们必须调用此接口 并将其作为参数传递。 如果我将此参数传递至显示软件, 它会将端口 1 设置为 逻辑分析仪。 换而言之,以每秒 10,000 次的频率 将端口 1 的 7 位数 传递至计算机进行绘图。 您可以看到,该程序 现在并没有做多少工作。 它获取来自开关的输入, 并设置延迟, 这取决于我是按下了 开关一还是开关二, 或是同时按下两个开关。 然后它将切换到 另一个引脚。 当它运行时,我们可以 看到端口 4 上 有三个引脚。 我们来构建它。 构建。 这是编译。 然后调试。 那是在擦除闪存, 下载代码。 它在启动调试器。 在本例中, 我们要启动程序。 我已经打开了显示软件按。 要使用它,第一步必须 连接它。 现在,如果您选择 0 作为 COM 端口, 它将为您进行搜索。 您无需在设备管理器中查找它。 因此我们要连接它。 现在它已经连接到我的 特定计算机的 COM 端口 7。 您的可能不太一样。 我们要选择 逻辑分析仪模式。 您看到这里是 逻辑分析仪模式。 它现在正在运行。 我可以在此处 看到配置。 我可以设置 我要查看的通道。 如果我要查看通道 0、1 和 4, 我可以那样做。 如果我要一个上升沿触发器, 我可以设置一个触发器。 现在我在此处看到的是 引脚 1 和引脚 4 上的 2 个输入和我的输出。 当我按下按钮时, 您将看到行为。 当我按下按钮时, 此处发生的行为是 它会更改频率。 如果我同时按下两个按钮, 它的频率非常慢。 您在底部可以看到 它将测量数字波形的 周期和占空比。 因此在本实验中, 我们学习了 如何调试逻辑分析仪。 能够实时观察输入和输出 是设计机器人所需的 一个重要任务。 祝您愉快。 76
本实验的总体目标是
介绍RSLK机器人套件
所需的一些开发工具。
在本实验中, 您需将LaunchPad
连接到您的计算机。
然后我们将运行TExaS显示软件。
在本实验中,
您将学习用 逻辑分析仪衡量
数字信号作为时间的函数。
现在让我们开始吧。
当然,如果您有一个真正的 逻辑分析仪,应该使用它。
但如果没有的话,
您可以使用本例程的逻辑分析仪。
在本例中, 您看到 LaunchPad
通过 USB 连接到 计算机上。
让我来向您演示步骤。
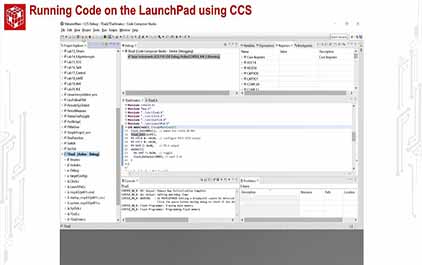
这是 Code Composer Studio。
我要使用 TExaS来演示
德州显示器。
我刚刚选择了 逻辑分析仪主电源
作为加载的实际主电源。
为了初始化逻辑分析仪,
我们必须调用此接口
并将其作为参数传递。
如果我将此参数传递至显示软件,
它会将端口 1 设置为 逻辑分析仪。
换而言之,以每秒 10,000 次的频率 将端口 1 的 7 位数
传递至计算机进行绘图。
您可以看到,该程序 现在并没有做多少工作。
它获取来自开关的输入, 并设置延迟,
这取决于我是按下了 开关一还是开关二,
或是同时按下两个开关。
然后它将切换到 另一个引脚。
当它运行时,我们可以 看到端口 4 上
有三个引脚。
我们来构建它。
构建。
这是编译。
然后调试。
那是在擦除闪存, 下载代码。
它在启动调试器。
在本例中, 我们要启动程序。
我已经打开了显示软件按。
要使用它,第一步必须
连接它。
现在,如果您选择 0 作为 COM 端口, 它将为您进行搜索。
您无需在设备管理器中查找它。
因此我们要连接它。
现在它已经连接到我的
特定计算机的 COM 端口 7。
您的可能不太一样。
我们要选择 逻辑分析仪模式。
您看到这里是 逻辑分析仪模式。
它现在正在运行。
我可以在此处 看到配置。
我可以设置 我要查看的通道。
如果我要查看通道 0、1 和 4, 我可以那样做。
如果我要一个上升沿触发器, 我可以设置一个触发器。
现在我在此处看到的是 引脚 1 和引脚 4 上的
2 个输入和我的输出。
当我按下按钮时, 您将看到行为。
当我按下按钮时, 此处发生的行为是
它会更改频率。
如果我同时按下两个按钮, 它的频率非常慢。
您在底部可以看到
它将测量数字波形的
周期和占空比。
因此在本实验中, 我们学习了
如何调试逻辑分析仪。
能够实时观察输入和输出
是设计机器人所需的 一个重要任务。
祝您愉快。 76
本实验的总体目标是 介绍RSLK机器人套件 所需的一些开发工具。 在本实验中, 您需将LaunchPad 连接到您的计算机。 然后我们将运行TExaS显示软件。 在本实验中, 您将学习用 逻辑分析仪衡量 数字信号作为时间的函数。 现在让我们开始吧。 当然,如果您有一个真正的 逻辑分析仪,应该使用它。 但如果没有的话, 您可以使用本例程的逻辑分析仪。 在本例中, 您看到 LaunchPad 通过 USB 连接到 计算机上。 让我来向您演示步骤。 这是 Code Composer Studio。 我要使用 TExaS来演示 德州显示器。 我刚刚选择了 逻辑分析仪主电源 作为加载的实际主电源。 为了初始化逻辑分析仪, 我们必须调用此接口 并将其作为参数传递。 如果我将此参数传递至显示软件, 它会将端口 1 设置为 逻辑分析仪。 换而言之,以每秒 10,000 次的频率 将端口 1 的 7 位数 传递至计算机进行绘图。 您可以看到,该程序 现在并没有做多少工作。 它获取来自开关的输入, 并设置延迟, 这取决于我是按下了 开关一还是开关二, 或是同时按下两个开关。 然后它将切换到 另一个引脚。 当它运行时,我们可以 看到端口 4 上 有三个引脚。 我们来构建它。 构建。 这是编译。 然后调试。 那是在擦除闪存, 下载代码。 它在启动调试器。 在本例中, 我们要启动程序。 我已经打开了显示软件按。 要使用它,第一步必须 连接它。 现在,如果您选择 0 作为 COM 端口, 它将为您进行搜索。 您无需在设备管理器中查找它。 因此我们要连接它。 现在它已经连接到我的 特定计算机的 COM 端口 7。 您的可能不太一样。 我们要选择 逻辑分析仪模式。 您看到这里是 逻辑分析仪模式。 它现在正在运行。 我可以在此处 看到配置。 我可以设置 我要查看的通道。 如果我要查看通道 0、1 和 4, 我可以那样做。 如果我要一个上升沿触发器, 我可以设置一个触发器。 现在我在此处看到的是 引脚 1 和引脚 4 上的 2 个输入和我的输出。 当我按下按钮时, 您将看到行为。 当我按下按钮时, 此处发生的行为是 它会更改频率。 如果我同时按下两个按钮, 它的频率非常慢。 您在底部可以看到 它将测量数字波形的 周期和占空比。 因此在本实验中, 我们学习了 如何调试逻辑分析仪。 能够实时观察输入和输出 是设计机器人所需的 一个重要任务。 祝您愉快。 76
本实验的总体目标是
介绍RSLK机器人套件
所需的一些开发工具。
在本实验中, 您需将LaunchPad
连接到您的计算机。
然后我们将运行TExaS显示软件。
在本实验中,
您将学习用 逻辑分析仪衡量
数字信号作为时间的函数。
现在让我们开始吧。
当然,如果您有一个真正的 逻辑分析仪,应该使用它。
但如果没有的话,
您可以使用本例程的逻辑分析仪。
在本例中, 您看到 LaunchPad
通过 USB 连接到 计算机上。
让我来向您演示步骤。
这是 Code Composer Studio。
我要使用 TExaS来演示
德州显示器。
我刚刚选择了 逻辑分析仪主电源
作为加载的实际主电源。
为了初始化逻辑分析仪,
我们必须调用此接口
并将其作为参数传递。
如果我将此参数传递至显示软件,
它会将端口 1 设置为 逻辑分析仪。
换而言之,以每秒 10,000 次的频率 将端口 1 的 7 位数
传递至计算机进行绘图。
您可以看到,该程序 现在并没有做多少工作。
它获取来自开关的输入, 并设置延迟,
这取决于我是按下了 开关一还是开关二,
或是同时按下两个开关。
然后它将切换到 另一个引脚。
当它运行时,我们可以 看到端口 4 上
有三个引脚。
我们来构建它。
构建。
这是编译。
然后调试。
那是在擦除闪存, 下载代码。
它在启动调试器。
在本例中, 我们要启动程序。
我已经打开了显示软件按。
要使用它,第一步必须
连接它。
现在,如果您选择 0 作为 COM 端口, 它将为您进行搜索。
您无需在设备管理器中查找它。
因此我们要连接它。
现在它已经连接到我的
特定计算机的 COM 端口 7。
您的可能不太一样。
我们要选择 逻辑分析仪模式。
您看到这里是 逻辑分析仪模式。
它现在正在运行。
我可以在此处 看到配置。
我可以设置 我要查看的通道。
如果我要查看通道 0、1 和 4, 我可以那样做。
如果我要一个上升沿触发器, 我可以设置一个触发器。
现在我在此处看到的是 引脚 1 和引脚 4 上的
2 个输入和我的输出。
当我按下按钮时, 您将看到行为。
当我按下按钮时, 此处发生的行为是
它会更改频率。
如果我同时按下两个按钮, 它的频率非常慢。
您在底部可以看到
它将测量数字波形的
周期和占空比。
因此在本实验中, 我们学习了
如何调试逻辑分析仪。
能够实时观察输入和输出
是设计机器人所需的 一个重要任务。
祝您愉快。 76
手机看
扫码用手机观看
 视频简介
视频简介
TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
所属课程:TI-RSLK 模块1 - 使用 CCS 在 LaunchPad 上运行代码
发布时间:2018.08.27
视频集数:5
本节视频时长:00:03:25
TI-RSLK课程中模块1的附件实验视频。


 未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
 未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
 未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
 未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
 未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器
未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器





