
毫米波雷达传感器
最新课程
- TI 高压研讨会
- 从零开始学 PSpice® for TI 仿真工具 - 手把手操作实训课程
- 高压系统功能安全简介
- 揭秘高压应用安规中的电气间隙和爬电距离
- 管理微型逆变器中的电源转换挑战
- 比较三相工业系统的交流/直流电源转换拓扑
- 隔离认证概述及其对高压设计的意义
- 在基于 GaN 的电源中实现钛金级效率
- 提高 800V SiC 牵引逆变器效率和功率密度的主要设计注意事项
- 如何设计安全可靠和高效的储能系统
热门课程
1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计

欢迎观看 FMCW 雷达 介绍系列视频的
第三模块。
本视频将深入探究 速度估算问题。
与第一模块中的 距离估算相似,
我们将介绍 诸如最大
可测速度和 速度分辨率等
内容。
在本模块中,我们要 尝试解答这样的问题:
如果您有 一部雷达,
并且雷达前方 有一个物体,
雷达会如何估算 该物体的速度?
另外,本模块将回顾 我们在模块 2 中
所学到和看到的内容。
如果有 多个物体,
这些物体与雷达的 距离相同,但相对速度
不同,此时 会怎么样?
两个等距物体的 速度接近到
何种程度时,雷达仍然 能够分辨?
雷达的最大可测速度 是否存在限制?
与前面的 模块一样,
我们首先来回顾 一些傅里叶变换
概念。
到目前为止,我们已经 讨论了连续时间信号的
傅里叶变换。
类似的概念同样 适用于离散信号。
我们假设这里有 一个离散信号,
离散信号, 该相量以每个样本
ω 弧度的恒定速率旋转。
这样一来,在任意两个样本之间, 此相量都旋转了 ω 弧度。
这时,我们会用到“离散角 频率”这个术语,
或者有时仅使用“频率” 来指代这个 ω。
请注意,这些相中的 每一相实际上
均代表一个复数。
因此,该序列的 另一种等效表示形式
就是这里 这个特定的
数学表达式。
对该序列进行 傅里叶变换,
精确地说是 离散傅里叶变换,
将在离散 频率 ω1 下
的频域中 得到单一峰值。
这里我介绍 FFT 这个词,
它就是用于计算这种 离散傅里叶变换的
有效算法。
现在,这个 离散序列包含
两相而不是一相, 如这里所示,
其中蓝色相量 以离散角频率
ω1 旋转, 红色相量
以离散角频率 ω2 旋转。
这个离散序列的 傅里叶变换
实际上分别在 离散频率 ω1
和 ω2 处具有两个峰值。
ω1 和 ω2 两个 频率要相隔多远
才能在傅里叶 变换中显示为
单独的峰值?
在这里, 您有两个
以略微不同的 频率 ω1 和 ω2
旋转的相量, 在经过 N 个样本后,
第二个相量比第一个 相量多旋转了
半个周期的 π 弧度。
所以,在本示例中,ω1 为 0,ω2 为 πN。
经过 N 个样本后,
ω2 相对于 ω1 的累计
角度将为 π 弧度 或半个周期。
您可以在这里 看到,这显然不足以
在频域内 分辨这两个
物体。
这里存在 同样的两相,
但现在的观测 时间段更长。
我们现在有 2N 个样本, 而不是先前的 N 个样本。
经过这 2N 个样本后,
与第一个相量相比, 第二个相量额外旋转了
一个完整周期。
您可以看到, 现在可以在
频域内清楚地分辨 这两个频率。
所以,这里的重点是, 序列长度越长,
分辨率就越高。
一般来说, 长度为 N 的序列
可以分隔 被大于每个
样本 2πN 弧度 分隔的角频率。
让我们花一点时间 比较一下离散
和连续分段的 分辨标准。
它们来自于最后一个模块, 但对于连续信号而言,
只要两种频率的 间隔差值 f
大于 1 乘以 T 赫兹 或 1 乘以每秒 T 个周期,
其中 T 是观测窗口, 就可以分辨出这两种频率。
至于离散信号,我们 在上一张幻灯片中讲过,
只要两种离散 频率的间隔
差值 ω 大于 每个样本 2πN 弧度,
就可以分辨出这两种频率。
请注意这里的单位, 即每个样本的弧度数,
它实际上与每个样本 1 乘以 N 个周期是相同的,
因为每个周期 都是 2πN 弧度。
那么,如果您现在 看一下这两个等式,
就可以得出离散 和连续情况之间的
对应关系。
在一种情况下, 分辨率与
以观测时间 T 表示的长度成反比,
而在另一种 情况下则与
以观测样本数 N 表示的长度成反比。
这样,我们现在就具备了 了解 FMCW 雷达如何
测量速度的所有工具。
基本观点 是这样的:
您发射两个间隔时间 为 Tc 的线性调频脉冲。
与其中每个线性调频脉冲 相对应的距离 FFT
将在同一个位置 具有峰值,
但相位不同。
这两个峰值的 相位之间的
测量相位差 ω 将
与物体的运动 直接对应。
请注意,如果 物体的速度为 v,
该物体在此时间段 Tc 内的移动距离
将为 vTc。
所以,在这里的 这个等式中,
与所发射的这两个 线性调频脉冲
相对应的峰值 相位之间的
相位差表示为 4π 乘以物体在
该时段内移动的 距离除以 λ。
重新整理 这个等式后,
您就可以根据 这个测量的
相位差直接 估算速度。
这里的重点是, 在两个连续的
线性调频 脉冲之间测量的
相位差可用于 估算物体的速度。
使用我们刚才 所述的方法时,
可测量的最大速度 是否存在
限制?
请注意,此方法 依赖于相位差测量,
只有当差值 介于正负 180 度
或正负 π 弧度之间时, 才可以清楚地测量此值。
这里的一系列示意图 就说明了这一点。
例如,如果我们对 相量在这两个
线性调频脉冲之间的 运动进行可视化处理,
则对于正速度,您就可以 可视化逆时针运动的相量。
同样,对于负速度,
您可以可视化 顺时针运动的相量。
现在,如果顺时针 或逆时针方向的
运动量 超过 180 度,
则会产生模糊。
例如,在这个 图示中,
不能确定相量是在 逆时针方向移动了
角度 a,还是在 顺时针方向移动了
角度 b。
因此, 要清楚地测量速度,
两个线性调频脉冲 之间的相位变化
必须小于 π, 这意味着我们
可以从先前的 材料中得到这个
相位变化表达式。
此表达式 必须小于 π,
它是可以清楚地 测量最大速度的
表达式。
这里的重点是, 此表达式给出了
可以通过两个 以 Tc 为间隔的
线性调频脉冲测量的最大相对速度。
在这里您 可以看到,
要得到更高的 Vmax, 线性调频脉冲必须很密集。
刚才我们已经 了解了如何测量
雷达前方单个 物体的速度。
我希望大家都明白, 只要物体与雷达
之间的距离不同, 就可以将这种方法
应用于雷达 前方的多个物体。
但如果有多个 物体与雷达的
距离相同, 情况会怎么样?
在这里的示例中,
雷达前方 有两个物体,
它们与雷达的距离相同, 但速度不同,相对于雷达的
速度分别为 V1 和 V2。
我们之前讨论过,
与要发射的 这两个线性调频脉冲
相对应的距离 FFT 中 只有一个峰值,
但峰值处的 相量将具有
来自这两个 物体的分量。
这样一来,我们 之前所说的
简单相位比较方法 就不再适用了,
因为此处的相位
具有来自 这两个物体的
速度分量。
那么,该如何解决呢?
一种解决方案是发射 一系列等间隔的线性调频脉冲,
而不仅仅是两个线性调频脉冲。
假设这里有 N 个 等间隔的线性调频脉冲,
那么根据我们 之前的讨论,与其中的
每个线性调频 脉冲相对应的
距离 FFT 将在完全 相同的位置具有峰值。
但是,与这些 峰值的相量
相对应的离散序列 将有两个旋转相量,
分别以频率 ω1 和 ω2 旋转,
对应于两个速度 V1 和 V2。
因此,这个离散 序列上的 FFT
将显示两个 峰值,分别
对应于 ω1 和 ω2
频率的离散角。
测量出 ω1 和 ω2 后,
我们就可以 利用前面介绍的
这些表达式 反算出速度。
在进行下一步之前, 我们先来解释几个术语。
这里的 FFT 是在 线性调频脉冲之间执行的,
在文献中通常 称为多普勒 FFT。
这个对其执行 多普勒 FFT 的
等间隔线性调频 脉冲序列
称为帧。
因此,FMCW 雷达的 基本传输单位
实际上是帧。
多普勒 FFT 的 速度分辨能力如何?
换句话说,V1 和 V2 之间的最小间隔
应该是多少,才能让它们 在多普勒 FFT 中
显示为两个峰值?
事实上,推导 速度分辨率
表达式的过程非常 简单,并且类似于
我们在模块 1 中推导 距离分辨率的过程。
我们需要做的就是 利用我们知道的
这两个事实, 此时此刻,
我强烈建议 您暂停视频,
自己推导一下这个 速度分辨率
表达式。
根据这里的 表达式,
速度间隔为 δV 的
两个物体的角频率 间隔将为 δω,
其中 Tc 是相邻 线性调频脉冲之间的间隔。
根据离散傅里叶 变换的特性,
我们知道, 只要两个频率的
间隔 δω 大于 2πN,
就可以分辨这两个频率。
现在,让我们替代 这里的表达式
并稍做整理, 就得到了
下面的这个 不等式,
进而得出速度 分辨率的表达式。
请注意,在这个 表达式中,
线性调频脉冲数 N 乘以相邻线性调频
脉冲之间的 持续时间实际上
等于总帧时间。
最后,我们 得到了这个
速度分辨率 表达式,
它基本上表明 雷达的速度分辨率
与帧时间 成反比,
并由 λ 乘以 两倍的帧时间表示。
现在有个问题。
这两个帧具有 相同的帧长度 Tf,
但与雷达 A 相对应的
帧的线性调频 脉冲数是与雷达 B
相对应的帧的 两倍。问题来了,
如何评价 这两个帧的
最大可测速度 和速度分辨率?
这就进入了 第三模块的尾声。
在下一个模块中, 我们将使用
目前为止学到的所有 有关距离和速度估算的
知识来设计一个 发射信号,该信号满足
-
 未学习 1.1 毫米波传感介绍:FMCW雷达 - 模块1:范围估计
未学习 1.1 毫米波传感介绍:FMCW雷达 - 模块1:范围估计
-
 未学习 1.2 毫米波传感介绍:FMCW雷达 - 模块2:IF信号的相位
未学习 1.2 毫米波传感介绍:FMCW雷达 - 模块2:IF信号的相位
-
 未学习 1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计
未学习 1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计
-
 未学习 1.4 毫米波传感介绍:FMCW雷达 - 模块4:一些系统设计讨论
未学习 1.4 毫米波传感介绍:FMCW雷达 - 模块4:一些系统设计讨论
-
 未学习 1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
未学习 1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
-
 未学习 2.1 TI汽车mmWave传感器设备概述
未学习 2.1 TI汽车mmWave传感器设备概述
-
 未学习 2.2 TI工业mmWave传感器器件概述
未学习 2.2 TI工业mmWave传感器器件概述
-
 未学习 2.3 mmWave SDK简介
未学习 2.3 mmWave SDK简介
-
 未学习 2.4 mmWave雷达编程模型
未学习 2.4 mmWave雷达编程模型
-
 未学习 2.5 mmWave EVMs深入学习
未学习 2.5 mmWave EVMs深入学习
-
 未学习 2.6 mmWave波形传感器简介1443硬件加速器
未学习 2.6 mmWave波形传感器简介1443硬件加速器
-
 未学习 3.1 mmWave SDK EVM开箱即用演示
未学习 3.1 mmWave SDK EVM开箱即用演示
-
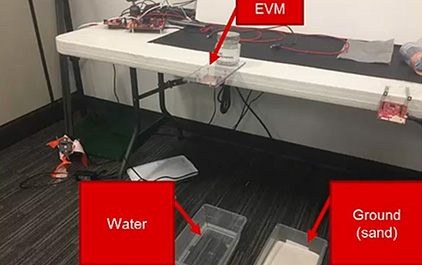
 未学习 3.2 mmWave水VS地面分类实验
未学习 3.2 mmWave水VS地面分类实验
-
 未学习 3.3 mmWave生命体征实验
未学习 3.3 mmWave生命体征实验
-
未学习 (中文)毫米波传感介绍:FMCW雷达 - 模块1:范围估计开始学习
-
未学习 (中文)毫米波传感介绍:FMCW雷达 - 模块2:IF信号的相位开始学习
-
未学习 (中文)毫米波传感介绍:FMCW雷达 - 模块3:速度估计开始学习
-
未学习 (中文)毫米波传感介绍:FMCW雷达 - 模块4:一些系统设计讨论开始学习
-
未学习 (中文)毫米波传感介绍:FMCW雷达 - 模块5:角度估计开始学习
-
未学习 (中文)mmWave SDK EVM开箱即用演示
-
未学习 (中文)mmWave水VS地面分类实验
-
 未学习 (中文)机器人如何利用mmWave实现“传感和避障”
未学习 (中文)机器人如何利用mmWave实现“传感和避障”
-
 未学习 (中文)mmWave与机器人:深度技术探究
未学习 (中文)mmWave与机器人:深度技术探究
-
未学习 (中文)TI汽车mmWave传感器设备概述
-
未学习 (中文)TI工业mmWave传感器器件概述
-
未学习 (中文)mmWave SDK简介
-
 未学习 (中文)DCA1000 培训视频
未学习 (中文)DCA1000 培训视频
-
未学习 (中文)mmWave雷达编程模型
















 视频简介
视频简介
1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计
毫米波传感介绍:FMCW雷达 - 模块3:速度估计的相关介绍

