1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
Loading the player...
将在30s后自动为您播放下一课程
欢迎观看有关 FMCW 雷达的 本介绍性系列的 第五个模块。 前面的四个 模块重点介绍 沿距离和速度 两个维度进行感应。 该模块将重点 介绍沿第三个 维度,即角度, 进行感应。 因此,我们要在 本模块中回答的 问题 就是,您有 一个雷达,它前面 有一个物体, 雷达如何 估算该物体的 到达角? 如果在不同的角度 存在多个物体,但可能 具有相同的距离和相同的 相对速度,会怎么样? 雷达的最大 角度视场 有哪些决定因素? 雷达的角度分辨率 取决于什么? 回忆一下我们之前的 模块内容,您应该记得, IF 信号的相位对物体 距离的微小变化非常 敏感,具体而言, 物体距离的微小 变化 Δd 会导致 相位变化 ω, 其值为 4πΔd 除以 λ。 角度估算利用了 类似的概念。 角度估算需要 至少 2 个 RX 天线。 这里利用的 是物体相对 每个天线的 差分距离。 那么,发射天线 发射一个线性 调频脉冲信号。 它在物体上进行 反射,您可以想象 一束射线从物体 到达第一个 RX 天线,另一束射线 从物体到达第二个 RX 天线。 在该示例中,到达第二个 RX 天线的射线必须 传播稍远一点的距离, 即额外的距离 Δd, 才能到达那里。 该额外的距离会导致 额外的相位 ω,它等于 2πΔd 除以 λ。 这便是该 天线处的信号 和该天线处的 信号之间的相位差。 因此,我们可以在这里 看到,这两个表达式 非常类似,实际上, 除了因数 2 之外, 它们几乎是相同的。 接下来,请您思考 下面的问题。 这两个表达式为什么 具有因数 2 的差异? 这个图说明了 该额外距离 与到达角的 相关性。 假设与两个 天线之间的 该距离 d 相比, 物体足够远, 从而可以假设从物体 到达 RX 天线的射线 是平行的。 抱歉, 我滥用了符号。 在该模块的后续 部分,d 实际上 指两个连续 天线之间的距离。 因此,这里的 d 是两个 RX 天线之间的 距离,θ 是 物体相对于 雷达的达到角度。 这是与第一个 天线相比,射线 到第二个天线的 额外距离。 使用基本的 几何学知识, 您可发现这是 一个直角三角形, 其中斜边为 d, 以及这个角 θ。 因此,射线必须 传播的该额外距离 结果为 dsin(θ)。 那么,发射器天线发射 一个线性调频脉冲帧, 每个天线会 接收该数据。 每个天线会 处理该数据, 以创建一个 2D-FFT 矩阵,其中包含 与物体的距离和 速度相对应的峰值。 那么,这里是 与该接收器 相对应的 2D-FFT 峰值,以及 与该接收器相对应的另一个 2D-FFT 矩阵。 请注意,峰值的 位置将几乎 与这两个 2D-FFT 相同。 我们先前 已讨论过, 峰值位置对雷达 与物体之间 距离的微小 变化非常 敏感。 不过,这两个 峰值之间的 相位差将为 2πdsin(θ), dsin(θ) 是 额外的距离, 然后除以 λ。 您通过比较 这两个信号, 这两个峰值处的 信号来测量 该相位差之后, 您可以求 该公式的反函数, 以计算到达角。 如果您看看该表达式, ω 等于 2πdsin(θ) 除以 λ, 您会发现, 由于 sin(θ),我们 要估算的量,即 θ, 与所测量的 相位差 ω 之间的 关系是 非线性的。 那么,这是在该系列中 我们第一次遇到 这种情况。 那么,您可以 回想一下, 第二个模块中 速度估算中的 表达式为 ω 等于 4πVTc 除以 λ。 您可以看到, 估算的相位差 以线性方式 依赖于速度。 类似地,在第一个 模块中,IF 频率 与距离之间 具有线性关系。 因此,如果您看看 该 sin(θ) 与 θ 图, 当 θ 接近于 0 时,sin(θ) 对 θ 非常敏感。 因此,θ 的微小变化会 导致 sin(θ) 产生同等 大小的变化。 但该敏感性会随着 θ 的增大而减低。 当 θ 接近于 90 时,sin(θ) 变得 对 θ 非常 不敏感。 因此,随着 θ 逐渐增大, θ 估算越来越容易 产生误差。 这里的图对此 进行了显示。 当物体位于雷达 正前方时,角度 估算会达到最佳值。 这意味着 θ 等于 0。 随着 θ 逐渐增大 并接近于 90 度, 当然,由于存在 噪声,估算准确性 会下降。 在前面的模块中, 当我们讨论速度 估算时, 我们看到 雷达能够不模糊 测量的速度具有 上限。 我们将此称为 雷达的最大速度。 雷达可以测量的最大 不模糊角度是否存在 类似的限制? 这正是我们要在该 幻灯片中讨论的内容。 那么,如果您将 这想象成表示 与雷达左侧物体的 2D-FFT 峰值相对应的 相量,当您从 第一个 RX 天线 转到第二个 RX 天线时,该相量 沿逆时针方向移动。 类似地,对于雷达 右侧的物体,相量 将沿顺时针方向 移动,如此处所示。 因此,只要 沿顺时针 或逆时针 方向的移动 小于 180 度 或 π 弧度, 对该移动的测量 就是不模糊的。 如果情况不是 这样,如此处所示, 该相量从这里 移动到这里, 那么您就无法 分辨该移动 是沿逆时针方向 移动了相应的度数, 还是沿顺时针方向 移动了 b 度数。 因此,基本而言, 速度的不模糊 测量要求两个 天线之间的 相位变化 小于 180 度。 然后,插入前面的 幻灯片中的 ω 值, 并稍微对其 进行重新排列, 我们看到 雷达可以 测量的最大 角度必须小于 这里的表达式。 λ 除以 2d 的反正弦, 其中 d 是两个 天线之间的距离。 所以,此处的重点是, 两个天线之间的 距离 d 可以服务的 最大视场为 θmax 等于 λ 除以 2d 的反正弦。 请注意,在两个天线之间,λ 除以 2 再除以距离 d 可导致 最大的可能 视场正 90 度 或负 90 度。 到目前为止,我们 已经讨论了雷达 前方的单个物体, 以及通过测量两个 RX 天线之间的 相位差来估算 其到达角。 现在请考虑雷达 前方的两个物体, 它们相对于雷达具有 相同的距离和相同的 速度,这样 这两个物体 将处于 2D-FFT 中 相同的距离速度单元。 那么,这是来自 第一个天线的 2D-FFT。 这是来自第二个 天线的 2D-FFT。 因此该 2D-FFT 中 有单个峰值。 但峰值处的信号 将具有来自对应于 这两个物体的相量的 贡献,这里对这个天线 进行了说明, 这里对第二个 天线进行了说明。 因此,我们 先前讨论的 简单相位比较 技术将不再适用。 解决方案是什么? 它将非常类似于我们 先前对速度模块采取的 解决方案。 我们将 RX 天线的 数量从两个增加到 N 个,并创建 N 个 接收天线的区域, 所有这些 天线处的 二维 FFT 将在同一个 位置具有一个峰值。 该系列峰值处的 信号将创建一个 包含两个旋转 相位的离散序列, 如此处所示。 该序列上的 FFT 将显示为 ω1 和 ω2 处的两个峰值, 其中 ω1 和 ω2 是两个物体的旋转 速度,以每个样本的 弧度数为单位。 那么,您通过 FFT 读取 这两个峰值的位置, 然后反演计算 两个物体的 到达角, 如此处所示。 我们将此处 在 RX 天线上 执行的特定 FFT 称为角度 FFT。 现在我们已经 介绍了角度 FFT, 那么下一个 问题自然是, 该 FFT 的分辨率 是多少? 该问题针对两个 物体,它们相对于 雷达分别具有 θ 和 θ 加 Δθ 的 到达角。 当两个物体在角度 FFT 中显示为不同的 峰值时,Δθ 可以 达到多小的值? 我们已经在 模块 1 中针对 距离分辨率以及 在模块 2 中针对 速度分辨率解决了该问题。 在这里,我们将针对 角度分辨率执行非常 类似的操作。 要针对角度 分辨率推导 该表达式,只需 记住以下要点: 到达角为 θ 的物体具有 离散频率 ω, 它为 2πdsin(θ) 除以 λ,d 为两个 天线之间的距离。 频域中距离的 标准是,角频率的 距离 Δω 必须大于 2π 除以 N,N 为 FFT 中的 样本数。 那么,此时, 您或许可以 暂停视频,尝试自己 推导出该表达式。 到达角 分别为 θ 和 θ 加 Δθ 的两个 物体将通过 这里的表达式 区分其离散频率。 现在,为了简化 该表达式,您应该 记得在微积分中, sin(θ) 的导数是 cos(θ), 这意味着 对应的微小 变化 Δθ 的 sin(θ) 变化率 等于 cos(θ)。 因此,我可以将这里的 表达式替换为 cos(θ) 乘以 Δθ,就像这样。 此外,请回忆一下 我们在模块 2 中 讨论过的离散 傅里叶变换的 特性,对于我们 要在频域中分隔的 两个峰值, 其角频率的 距离应大于 2π 除以 N, N 为 FFT 的 样本输入 数量,在本例中 也是阵列中 天线的数量。 那么,替换 此处的表达式, 我得到这个不等式,然后 稍微对其进行重新排列, 我得到这个 不等式,它 实际上是表示雷达 分辨率角度的表达式。 还要注意,由于 N 是阵列中 天线的数量,d 是两个 连续天线之间的距离, 因此 N 乘以 d 实际上是 天线阵列的长度。 因此,您可以说 角分辨率随着 接收器天线阵列 长度的增大而增大。 现在,当我们 说分辨率时, 通常假设两个天线之间的 距离为 λ 除以 2,并且 θ 为 0。 在该表达式中 替换它,您将 得到该表示分辨率 角度的表达式, 它实际上 取决于 θ 和天线间距。 需要记住的一点是, 这里的表达式实际上 以弧度为单位。 因此,您需要 将其乘以 180 再除以 π,以将其 转换为度数。 如果您看看该 表达式,有一点 很有意思,即分辨率 角度取决于 θ。 这在距离 或速度 背景中 未出现过。 因此距离和 速度分辨率 都独立于实际的 距离和速度值。 其原因还是在于 sin(θ) 的不一致 特性。 因此,对于由 Δθ 分隔的两个物体, 其在角度 FFT 中的 角频率在 θ 等于 0 时实际上 离得更远, 并且随着 θ 的增大 彼此越来越靠近, 即使在两种 情况下距离 Δθ 相同也是如此。 正如您现在可能 已经了解的那样, FMCW 雷达中的角度 估算和速度估算 取决于非常类似的概念。 实际上, 数学基础 几乎是相同的。 因此,我认为通过 一个幻灯片来比较 这两者应该有所帮助。 角度估算利用线性 调频脉冲之间的 相位变化,这些脉冲 在空间上是分离的。 速度估算也 利用相位变化, 但它是针对在时间上 分离的线性调频脉冲。 角度分辨率取决于 天线阵列长度。 请注意,Nd 实际上 是天线阵列的 总长度。 因此,角度分辨率 与天线阵列的长度 成反比。 速度估算值 与帧的长度 成反比。 可以不模糊 测量的最大 角度取决于两个 连续天线之间的 距离 d。 该距离越小, θmax 就越大。 可以不模糊 测量的最大 速度取决于连续线性 调频脉冲之间的时间 Tc。 类似地,Tc 越小, Vmax 就越大。 此幻灯片总结了 角度估算过程, 并将其置于 FMCW 雷达系统的背景中。 那么,您具有合成器 synth,也称为 LO 或本机 振荡器,它可以生成 线性调频脉冲。 线性调频脉冲由 发射天线进行发射。 它从雷达前方的 物体上进行反射。 在每个接收 天线处接收 反射信号。 synth 信号路由到 其中的每个 RX 天线,接收到的信号 与 LO 信号混合, 以创建 IF 信号。 IF 信号经过低通滤波器, 并由 ADC 进行采样。 该 ADC 数据在整个 帧中进行处理, 以创建一个 2D-FFT 网格, 针对每个 RX 天线创建一个 此类 2D-FFT 网格。 该 2D-FFT 网格中的 峰值与物体的距离 和速度相对应。 该系列 TX 天线中对应 峰值上的 FFT 称为角度 FFT, 该角度 FFT 中的峰值 直接对应于 物体的到达角。 我要通过一个简短的 问题来结束该模块。 那么,您有两个 静止的物体, 它们到雷达的 距离相等。 该雷达具有一个发射 天线和两个接收天线。 是否可以使用 该雷达估算 这两个物体的 到达角? 请考虑一下 这个问题。 总之,该模块 就到此结束了。 我希望通过 模块 1 至 5, 您已经对使用 FMCW 雷达进行毫米波 传感有了一定的了解, 并且希望您喜欢它。 我们希望将来 以您到目前为止 学习到的内容为基础 添加更多的模块。
欢迎观看有关 FMCW 雷达的 本介绍性系列的 第五个模块。 前面的四个 模块重点介绍 沿距离和速度 两个维度进行感应。 该模块将重点 介绍沿第三个 维度,即角度, 进行感应。 因此,我们要在 本模块中回答的 问题 就是,您有 一个雷达,它前面 有一个物体, 雷达如何 估算该物体的 到达角? 如果在不同的角度 存在多个物体,但可能 具有相同的距离和相同的 相对速度,会怎么样? 雷达的最大 角度视场 有哪些决定因素? 雷达的角度分辨率 取决于什么? 回忆一下我们之前的 模块内容,您应该记得, IF 信号的相位对物体 距离的微小变化非常 敏感,具体而言, 物体距离的微小 变化 Δd 会导致 相位变化 ω, 其值为 4πΔd 除以 λ。 角度估算利用了 类似的概念。 角度估算需要 至少 2 个 RX 天线。 这里利用的 是物体相对 每个天线的 差分距离。 那么,发射天线 发射一个线性 调频脉冲信号。 它在物体上进行 反射,您可以想象 一束射线从物体 到达第一个 RX 天线,另一束射线 从物体到达第二个 RX 天线。 在该示例中,到达第二个 RX 天线的射线必须 传播稍远一点的距离, 即额外的距离 Δd, 才能到达那里。 该额外的距离会导致 额外的相位 ω,它等于 2πΔd 除以 λ。 这便是该 天线处的信号 和该天线处的 信号之间的相位差。 因此,我们可以在这里 看到,这两个表达式 非常类似,实际上, 除了因数 2 之外, 它们几乎是相同的。 接下来,请您思考 下面的问题。 这两个表达式为什么 具有因数 2 的差异? 这个图说明了 该额外距离 与到达角的 相关性。 假设与两个 天线之间的 该距离 d 相比, 物体足够远, 从而可以假设从物体 到达 RX 天线的射线 是平行的。 抱歉, 我滥用了符号。 在该模块的后续 部分,d 实际上 指两个连续 天线之间的距离。 因此,这里的 d 是两个 RX 天线之间的 距离,θ 是 物体相对于 雷达的达到角度。 这是与第一个 天线相比,射线 到第二个天线的 额外距离。 使用基本的 几何学知识, 您可发现这是 一个直角三角形, 其中斜边为 d, 以及这个角 θ。 因此,射线必须 传播的该额外距离 结果为 dsin(θ)。 那么,发射器天线发射 一个线性调频脉冲帧, 每个天线会 接收该数据。 每个天线会 处理该数据, 以创建一个 2D-FFT 矩阵,其中包含 与物体的距离和 速度相对应的峰值。 那么,这里是 与该接收器 相对应的 2D-FFT 峰值,以及 与该接收器相对应的另一个 2D-FFT 矩阵。 请注意,峰值的 位置将几乎 与这两个 2D-FFT 相同。 我们先前 已讨论过, 峰值位置对雷达 与物体之间 距离的微小 变化非常 敏感。 不过,这两个 峰值之间的 相位差将为 2πdsin(θ), dsin(θ) 是 额外的距离, 然后除以 λ。 您通过比较 这两个信号, 这两个峰值处的 信号来测量 该相位差之后, 您可以求 该公式的反函数, 以计算到达角。 如果您看看该表达式, ω 等于 2πdsin(θ) 除以 λ, 您会发现, 由于 sin(θ),我们 要估算的量,即 θ, 与所测量的 相位差 ω 之间的 关系是 非线性的。 那么,这是在该系列中 我们第一次遇到 这种情况。 那么,您可以 回想一下, 第二个模块中 速度估算中的 表达式为 ω 等于 4πVTc 除以 λ。 您可以看到, 估算的相位差 以线性方式 依赖于速度。 类似地,在第一个 模块中,IF 频率 与距离之间 具有线性关系。 因此,如果您看看 该 sin(θ) 与 θ 图, 当 θ 接近于 0 时,sin(θ) 对 θ 非常敏感。 因此,θ 的微小变化会 导致 sin(θ) 产生同等 大小的变化。 但该敏感性会随着 θ 的增大而减低。 当 θ 接近于 90 时,sin(θ) 变得 对 θ 非常 不敏感。 因此,随着 θ 逐渐增大, θ 估算越来越容易 产生误差。 这里的图对此 进行了显示。 当物体位于雷达 正前方时,角度 估算会达到最佳值。 这意味着 θ 等于 0。 随着 θ 逐渐增大 并接近于 90 度, 当然,由于存在 噪声,估算准确性 会下降。 在前面的模块中, 当我们讨论速度 估算时, 我们看到 雷达能够不模糊 测量的速度具有 上限。 我们将此称为 雷达的最大速度。 雷达可以测量的最大 不模糊角度是否存在 类似的限制? 这正是我们要在该 幻灯片中讨论的内容。 那么,如果您将 这想象成表示 与雷达左侧物体的 2D-FFT 峰值相对应的 相量,当您从 第一个 RX 天线 转到第二个 RX 天线时,该相量 沿逆时针方向移动。 类似地,对于雷达 右侧的物体,相量 将沿顺时针方向 移动,如此处所示。 因此,只要 沿顺时针 或逆时针 方向的移动 小于 180 度 或 π 弧度, 对该移动的测量 就是不模糊的。 如果情况不是 这样,如此处所示, 该相量从这里 移动到这里, 那么您就无法 分辨该移动 是沿逆时针方向 移动了相应的度数, 还是沿顺时针方向 移动了 b 度数。 因此,基本而言, 速度的不模糊 测量要求两个 天线之间的 相位变化 小于 180 度。 然后,插入前面的 幻灯片中的 ω 值, 并稍微对其 进行重新排列, 我们看到 雷达可以 测量的最大 角度必须小于 这里的表达式。 λ 除以 2d 的反正弦, 其中 d 是两个 天线之间的距离。 所以,此处的重点是, 两个天线之间的 距离 d 可以服务的 最大视场为 θmax 等于 λ 除以 2d 的反正弦。 请注意,在两个天线之间,λ 除以 2 再除以距离 d 可导致 最大的可能 视场正 90 度 或负 90 度。 到目前为止,我们 已经讨论了雷达 前方的单个物体, 以及通过测量两个 RX 天线之间的 相位差来估算 其到达角。 现在请考虑雷达 前方的两个物体, 它们相对于雷达具有 相同的距离和相同的 速度,这样 这两个物体 将处于 2D-FFT 中 相同的距离速度单元。 那么,这是来自 第一个天线的 2D-FFT。 这是来自第二个 天线的 2D-FFT。 因此该 2D-FFT 中 有单个峰值。 但峰值处的信号 将具有来自对应于 这两个物体的相量的 贡献,这里对这个天线 进行了说明, 这里对第二个 天线进行了说明。 因此,我们 先前讨论的 简单相位比较 技术将不再适用。 解决方案是什么? 它将非常类似于我们 先前对速度模块采取的 解决方案。 我们将 RX 天线的 数量从两个增加到 N 个,并创建 N 个 接收天线的区域, 所有这些 天线处的 二维 FFT 将在同一个 位置具有一个峰值。 该系列峰值处的 信号将创建一个 包含两个旋转 相位的离散序列, 如此处所示。 该序列上的 FFT 将显示为 ω1 和 ω2 处的两个峰值, 其中 ω1 和 ω2 是两个物体的旋转 速度,以每个样本的 弧度数为单位。 那么,您通过 FFT 读取 这两个峰值的位置, 然后反演计算 两个物体的 到达角, 如此处所示。 我们将此处 在 RX 天线上 执行的特定 FFT 称为角度 FFT。 现在我们已经 介绍了角度 FFT, 那么下一个 问题自然是, 该 FFT 的分辨率 是多少? 该问题针对两个 物体,它们相对于 雷达分别具有 θ 和 θ 加 Δθ 的 到达角。 当两个物体在角度 FFT 中显示为不同的 峰值时,Δθ 可以 达到多小的值? 我们已经在 模块 1 中针对 距离分辨率以及 在模块 2 中针对 速度分辨率解决了该问题。 在这里,我们将针对 角度分辨率执行非常 类似的操作。 要针对角度 分辨率推导 该表达式,只需 记住以下要点: 到达角为 θ 的物体具有 离散频率 ω, 它为 2πdsin(θ) 除以 λ,d 为两个 天线之间的距离。 频域中距离的 标准是,角频率的 距离 Δω 必须大于 2π 除以 N,N 为 FFT 中的 样本数。 那么,此时, 您或许可以 暂停视频,尝试自己 推导出该表达式。 到达角 分别为 θ 和 θ 加 Δθ 的两个 物体将通过 这里的表达式 区分其离散频率。 现在,为了简化 该表达式,您应该 记得在微积分中, sin(θ) 的导数是 cos(θ), 这意味着 对应的微小 变化 Δθ 的 sin(θ) 变化率 等于 cos(θ)。 因此,我可以将这里的 表达式替换为 cos(θ) 乘以 Δθ,就像这样。 此外,请回忆一下 我们在模块 2 中 讨论过的离散 傅里叶变换的 特性,对于我们 要在频域中分隔的 两个峰值, 其角频率的 距离应大于 2π 除以 N, N 为 FFT 的 样本输入 数量,在本例中 也是阵列中 天线的数量。 那么,替换 此处的表达式, 我得到这个不等式,然后 稍微对其进行重新排列, 我得到这个 不等式,它 实际上是表示雷达 分辨率角度的表达式。 还要注意,由于 N 是阵列中 天线的数量,d 是两个 连续天线之间的距离, 因此 N 乘以 d 实际上是 天线阵列的长度。 因此,您可以说 角分辨率随着 接收器天线阵列 长度的增大而增大。 现在,当我们 说分辨率时, 通常假设两个天线之间的 距离为 λ 除以 2,并且 θ 为 0。 在该表达式中 替换它,您将 得到该表示分辨率 角度的表达式, 它实际上 取决于 θ 和天线间距。 需要记住的一点是, 这里的表达式实际上 以弧度为单位。 因此,您需要 将其乘以 180 再除以 π,以将其 转换为度数。 如果您看看该 表达式,有一点 很有意思,即分辨率 角度取决于 θ。 这在距离 或速度 背景中 未出现过。 因此距离和 速度分辨率 都独立于实际的 距离和速度值。 其原因还是在于 sin(θ) 的不一致 特性。 因此,对于由 Δθ 分隔的两个物体, 其在角度 FFT 中的 角频率在 θ 等于 0 时实际上 离得更远, 并且随着 θ 的增大 彼此越来越靠近, 即使在两种 情况下距离 Δθ 相同也是如此。 正如您现在可能 已经了解的那样, FMCW 雷达中的角度 估算和速度估算 取决于非常类似的概念。 实际上, 数学基础 几乎是相同的。 因此,我认为通过 一个幻灯片来比较 这两者应该有所帮助。 角度估算利用线性 调频脉冲之间的 相位变化,这些脉冲 在空间上是分离的。 速度估算也 利用相位变化, 但它是针对在时间上 分离的线性调频脉冲。 角度分辨率取决于 天线阵列长度。 请注意,Nd 实际上 是天线阵列的 总长度。 因此,角度分辨率 与天线阵列的长度 成反比。 速度估算值 与帧的长度 成反比。 可以不模糊 测量的最大 角度取决于两个 连续天线之间的 距离 d。 该距离越小, θmax 就越大。 可以不模糊 测量的最大 速度取决于连续线性 调频脉冲之间的时间 Tc。 类似地,Tc 越小, Vmax 就越大。 此幻灯片总结了 角度估算过程, 并将其置于 FMCW 雷达系统的背景中。 那么,您具有合成器 synth,也称为 LO 或本机 振荡器,它可以生成 线性调频脉冲。 线性调频脉冲由 发射天线进行发射。 它从雷达前方的 物体上进行反射。 在每个接收 天线处接收 反射信号。 synth 信号路由到 其中的每个 RX 天线,接收到的信号 与 LO 信号混合, 以创建 IF 信号。 IF 信号经过低通滤波器, 并由 ADC 进行采样。 该 ADC 数据在整个 帧中进行处理, 以创建一个 2D-FFT 网格, 针对每个 RX 天线创建一个 此类 2D-FFT 网格。 该 2D-FFT 网格中的 峰值与物体的距离 和速度相对应。 该系列 TX 天线中对应 峰值上的 FFT 称为角度 FFT, 该角度 FFT 中的峰值 直接对应于 物体的到达角。 我要通过一个简短的 问题来结束该模块。 那么,您有两个 静止的物体, 它们到雷达的 距离相等。 该雷达具有一个发射 天线和两个接收天线。 是否可以使用 该雷达估算 这两个物体的 到达角? 请考虑一下 这个问题。 总之,该模块 就到此结束了。 我希望通过 模块 1 至 5, 您已经对使用 FMCW 雷达进行毫米波 传感有了一定的了解, 并且希望您喜欢它。 我们希望将来 以您到目前为止 学习到的内容为基础 添加更多的模块。
欢迎观看有关 FMCW 雷达的 本介绍性系列的
第五个模块。
前面的四个 模块重点介绍
沿距离和速度 两个维度进行感应。
该模块将重点 介绍沿第三个
维度,即角度, 进行感应。
因此,我们要在 本模块中回答的
问题 就是,您有
一个雷达,它前面 有一个物体,
雷达如何 估算该物体的
到达角?
如果在不同的角度 存在多个物体,但可能
具有相同的距离和相同的 相对速度,会怎么样?
雷达的最大 角度视场
有哪些决定因素?
雷达的角度分辨率 取决于什么?
回忆一下我们之前的 模块内容,您应该记得,
IF 信号的相位对物体 距离的微小变化非常
敏感,具体而言, 物体距离的微小
变化 Δd 会导致 相位变化 ω,
其值为 4πΔd 除以 λ。
角度估算利用了 类似的概念。
角度估算需要 至少 2 个 RX 天线。
这里利用的 是物体相对
每个天线的 差分距离。
那么,发射天线 发射一个线性
调频脉冲信号。
它在物体上进行 反射,您可以想象
一束射线从物体 到达第一个 RX
天线,另一束射线 从物体到达第二个
RX 天线。
在该示例中,到达第二个 RX 天线的射线必须
传播稍远一点的距离, 即额外的距离 Δd,
才能到达那里。
该额外的距离会导致 额外的相位 ω,它等于
2πΔd 除以 λ。
这便是该 天线处的信号
和该天线处的 信号之间的相位差。
因此,我们可以在这里 看到,这两个表达式
非常类似,实际上, 除了因数 2 之外,
它们几乎是相同的。
接下来,请您思考 下面的问题。
这两个表达式为什么 具有因数 2 的差异?
这个图说明了 该额外距离
与到达角的 相关性。
假设与两个 天线之间的
该距离 d 相比, 物体足够远,
从而可以假设从物体 到达 RX 天线的射线
是平行的。
抱歉, 我滥用了符号。
在该模块的后续 部分,d 实际上
指两个连续 天线之间的距离。
因此,这里的 d 是两个 RX
天线之间的 距离,θ 是
物体相对于 雷达的达到角度。
这是与第一个 天线相比,射线
到第二个天线的 额外距离。
使用基本的 几何学知识,
您可发现这是 一个直角三角形,
其中斜边为 d, 以及这个角 θ。
因此,射线必须 传播的该额外距离
结果为 dsin(θ)。
那么,发射器天线发射 一个线性调频脉冲帧,
每个天线会 接收该数据。
每个天线会 处理该数据,
以创建一个 2D-FFT 矩阵,其中包含
与物体的距离和 速度相对应的峰值。
那么,这里是 与该接收器
相对应的 2D-FFT 峰值,以及 与该接收器相对应的另一个
2D-FFT 矩阵。
请注意,峰值的 位置将几乎
与这两个 2D-FFT
相同。
我们先前 已讨论过,
峰值位置对雷达 与物体之间
距离的微小 变化非常
敏感。
不过,这两个 峰值之间的
相位差将为 2πdsin(θ),
dsin(θ) 是 额外的距离,
然后除以 λ。
您通过比较 这两个信号,
这两个峰值处的 信号来测量
该相位差之后, 您可以求
该公式的反函数, 以计算到达角。
如果您看看该表达式, ω 等于 2πdsin(θ)
除以 λ, 您会发现,
由于 sin(θ),我们 要估算的量,即 θ,
与所测量的 相位差 ω 之间的
关系是 非线性的。
那么,这是在该系列中 我们第一次遇到
这种情况。
那么,您可以 回想一下,
第二个模块中 速度估算中的
表达式为 ω 等于 4πVTc 除以 λ。
您可以看到, 估算的相位差
以线性方式 依赖于速度。
类似地,在第一个 模块中,IF 频率
与距离之间 具有线性关系。
因此,如果您看看 该 sin(θ) 与 θ 图,
当 θ 接近于 0 时,sin(θ) 对 θ
非常敏感。
因此,θ 的微小变化会 导致 sin(θ) 产生同等
大小的变化。
但该敏感性会随着 θ 的增大而减低。
当 θ 接近于 90 时,sin(θ) 变得
对 θ 非常 不敏感。
因此,随着 θ 逐渐增大, θ 估算越来越容易
产生误差。
这里的图对此 进行了显示。
当物体位于雷达 正前方时,角度
估算会达到最佳值。
这意味着 θ 等于 0。
随着 θ 逐渐增大 并接近于 90 度,
当然,由于存在 噪声,估算准确性
会下降。
在前面的模块中, 当我们讨论速度
估算时, 我们看到
雷达能够不模糊 测量的速度具有
上限。
我们将此称为 雷达的最大速度。
雷达可以测量的最大 不模糊角度是否存在
类似的限制?
这正是我们要在该 幻灯片中讨论的内容。
那么,如果您将 这想象成表示
与雷达左侧物体的 2D-FFT 峰值相对应的
相量,当您从 第一个 RX 天线
转到第二个 RX 天线时,该相量
沿逆时针方向移动。
类似地,对于雷达 右侧的物体,相量
将沿顺时针方向 移动,如此处所示。
因此,只要 沿顺时针
或逆时针 方向的移动
小于 180 度 或 π 弧度,
对该移动的测量 就是不模糊的。
如果情况不是 这样,如此处所示,
该相量从这里 移动到这里,
那么您就无法 分辨该移动
是沿逆时针方向 移动了相应的度数,
还是沿顺时针方向 移动了 b 度数。
因此,基本而言, 速度的不模糊
测量要求两个 天线之间的
相位变化 小于 180 度。
然后,插入前面的 幻灯片中的 ω 值,
并稍微对其 进行重新排列,
我们看到 雷达可以
测量的最大 角度必须小于
这里的表达式。
λ 除以 2d 的反正弦, 其中 d 是两个
天线之间的距离。
所以,此处的重点是, 两个天线之间的
距离 d 可以服务的 最大视场为 θmax
等于 λ 除以 2d 的反正弦。
请注意,在两个天线之间,λ 除以 2 再除以距离 d 可导致
最大的可能 视场正 90 度
或负 90 度。
到目前为止,我们 已经讨论了雷达
前方的单个物体, 以及通过测量两个
RX 天线之间的 相位差来估算
其到达角。
现在请考虑雷达 前方的两个物体,
它们相对于雷达具有 相同的距离和相同的
速度,这样 这两个物体
将处于 2D-FFT 中 相同的距离速度单元。
那么,这是来自 第一个天线的 2D-FFT。
这是来自第二个 天线的 2D-FFT。
因此该 2D-FFT 中 有单个峰值。
但峰值处的信号 将具有来自对应于
这两个物体的相量的 贡献,这里对这个天线
进行了说明, 这里对第二个
天线进行了说明。
因此,我们 先前讨论的
简单相位比较 技术将不再适用。
解决方案是什么?
它将非常类似于我们 先前对速度模块采取的
解决方案。
我们将 RX 天线的 数量从两个增加到
N 个,并创建 N 个 接收天线的区域,
所有这些 天线处的
二维 FFT 将在同一个 位置具有一个峰值。
该系列峰值处的 信号将创建一个
包含两个旋转 相位的离散序列,
如此处所示。
该序列上的 FFT 将显示为 ω1
和 ω2 处的两个峰值, 其中 ω1 和 ω2
是两个物体的旋转 速度,以每个样本的
弧度数为单位。
那么,您通过 FFT 读取 这两个峰值的位置,
然后反演计算 两个物体的
到达角, 如此处所示。
我们将此处 在 RX 天线上
执行的特定 FFT 称为角度 FFT。
现在我们已经 介绍了角度 FFT,
那么下一个 问题自然是,
该 FFT 的分辨率 是多少?
该问题针对两个 物体,它们相对于
雷达分别具有 θ 和 θ 加 Δθ 的
到达角。
当两个物体在角度 FFT 中显示为不同的
峰值时,Δθ 可以 达到多小的值?
我们已经在 模块 1 中针对
距离分辨率以及 在模块 2 中针对
速度分辨率解决了该问题。
在这里,我们将针对 角度分辨率执行非常
类似的操作。
要针对角度 分辨率推导
该表达式,只需 记住以下要点:
到达角为 θ 的物体具有
离散频率 ω, 它为 2πdsin(θ)
除以 λ,d 为两个 天线之间的距离。
频域中距离的 标准是,角频率的
距离 Δω 必须大于
2π 除以 N,N 为
FFT 中的 样本数。
那么,此时, 您或许可以
暂停视频,尝试自己 推导出该表达式。
到达角 分别为 θ
和 θ 加 Δθ 的两个
物体将通过 这里的表达式
区分其离散频率。
现在,为了简化 该表达式,您应该
记得在微积分中, sin(θ) 的导数是 cos(θ),
这意味着 对应的微小
变化 Δθ 的 sin(θ)
变化率 等于 cos(θ)。
因此,我可以将这里的 表达式替换为 cos(θ) 乘以
Δθ,就像这样。
此外,请回忆一下 我们在模块 2 中
讨论过的离散 傅里叶变换的
特性,对于我们 要在频域中分隔的
两个峰值, 其角频率的
距离应大于 2π 除以 N,
N 为 FFT 的 样本输入
数量,在本例中 也是阵列中
天线的数量。
那么,替换 此处的表达式,
我得到这个不等式,然后 稍微对其进行重新排列,
我得到这个 不等式,它
实际上是表示雷达 分辨率角度的表达式。
还要注意,由于 N 是阵列中
天线的数量,d 是两个 连续天线之间的距离,
因此 N 乘以 d 实际上是
天线阵列的长度。
因此,您可以说 角分辨率随着
接收器天线阵列 长度的增大而增大。
现在,当我们 说分辨率时,
通常假设两个天线之间的 距离为 λ 除以 2,并且
θ 为 0。
在该表达式中 替换它,您将
得到该表示分辨率 角度的表达式,
它实际上 取决于 θ
和天线间距。
需要记住的一点是, 这里的表达式实际上
以弧度为单位。
因此,您需要 将其乘以 180
再除以 π,以将其 转换为度数。
如果您看看该 表达式,有一点
很有意思,即分辨率 角度取决于 θ。
这在距离 或速度
背景中 未出现过。
因此距离和 速度分辨率
都独立于实际的 距离和速度值。
其原因还是在于 sin(θ) 的不一致
特性。
因此,对于由 Δθ 分隔的两个物体,
其在角度 FFT 中的 角频率在 θ 等于
0 时实际上 离得更远,
并且随着 θ 的增大 彼此越来越靠近,
即使在两种 情况下距离
Δθ 相同也是如此。
正如您现在可能 已经了解的那样,
FMCW 雷达中的角度 估算和速度估算
取决于非常类似的概念。
实际上, 数学基础
几乎是相同的。
因此,我认为通过 一个幻灯片来比较
这两者应该有所帮助。
角度估算利用线性 调频脉冲之间的
相位变化,这些脉冲 在空间上是分离的。
速度估算也 利用相位变化,
但它是针对在时间上 分离的线性调频脉冲。
角度分辨率取决于 天线阵列长度。
请注意,Nd 实际上 是天线阵列的
总长度。
因此,角度分辨率 与天线阵列的长度
成反比。
速度估算值 与帧的长度
成反比。
可以不模糊 测量的最大
角度取决于两个 连续天线之间的
距离 d。
该距离越小, θmax 就越大。
可以不模糊 测量的最大
速度取决于连续线性 调频脉冲之间的时间 Tc。
类似地,Tc 越小, Vmax 就越大。
此幻灯片总结了 角度估算过程,
并将其置于 FMCW 雷达系统的背景中。
那么,您具有合成器 synth,也称为 LO 或本机
振荡器,它可以生成 线性调频脉冲。
线性调频脉冲由 发射天线进行发射。
它从雷达前方的 物体上进行反射。
在每个接收 天线处接收
反射信号。
synth 信号路由到 其中的每个 RX
天线,接收到的信号 与 LO 信号混合,
以创建 IF 信号。
IF 信号经过低通滤波器, 并由 ADC 进行采样。
该 ADC 数据在整个 帧中进行处理,
以创建一个 2D-FFT 网格, 针对每个 RX 天线创建一个
此类 2D-FFT 网格。
该 2D-FFT 网格中的 峰值与物体的距离
和速度相对应。
该系列 TX 天线中对应
峰值上的 FFT 称为角度 FFT,
该角度 FFT 中的峰值
直接对应于 物体的到达角。
我要通过一个简短的 问题来结束该模块。
那么,您有两个 静止的物体,
它们到雷达的 距离相等。
该雷达具有一个发射 天线和两个接收天线。
是否可以使用 该雷达估算
这两个物体的 到达角?
请考虑一下 这个问题。
总之,该模块 就到此结束了。
我希望通过 模块 1 至 5,
您已经对使用 FMCW 雷达进行毫米波
传感有了一定的了解, 并且希望您喜欢它。
我们希望将来 以您到目前为止
学习到的内容为基础 添加更多的模块。
欢迎观看有关 FMCW 雷达的 本介绍性系列的 第五个模块。 前面的四个 模块重点介绍 沿距离和速度 两个维度进行感应。 该模块将重点 介绍沿第三个 维度,即角度, 进行感应。 因此,我们要在 本模块中回答的 问题 就是,您有 一个雷达,它前面 有一个物体, 雷达如何 估算该物体的 到达角? 如果在不同的角度 存在多个物体,但可能 具有相同的距离和相同的 相对速度,会怎么样? 雷达的最大 角度视场 有哪些决定因素? 雷达的角度分辨率 取决于什么? 回忆一下我们之前的 模块内容,您应该记得, IF 信号的相位对物体 距离的微小变化非常 敏感,具体而言, 物体距离的微小 变化 Δd 会导致 相位变化 ω, 其值为 4πΔd 除以 λ。 角度估算利用了 类似的概念。 角度估算需要 至少 2 个 RX 天线。 这里利用的 是物体相对 每个天线的 差分距离。 那么,发射天线 发射一个线性 调频脉冲信号。 它在物体上进行 反射,您可以想象 一束射线从物体 到达第一个 RX 天线,另一束射线 从物体到达第二个 RX 天线。 在该示例中,到达第二个 RX 天线的射线必须 传播稍远一点的距离, 即额外的距离 Δd, 才能到达那里。 该额外的距离会导致 额外的相位 ω,它等于 2πΔd 除以 λ。 这便是该 天线处的信号 和该天线处的 信号之间的相位差。 因此,我们可以在这里 看到,这两个表达式 非常类似,实际上, 除了因数 2 之外, 它们几乎是相同的。 接下来,请您思考 下面的问题。 这两个表达式为什么 具有因数 2 的差异? 这个图说明了 该额外距离 与到达角的 相关性。 假设与两个 天线之间的 该距离 d 相比, 物体足够远, 从而可以假设从物体 到达 RX 天线的射线 是平行的。 抱歉, 我滥用了符号。 在该模块的后续 部分,d 实际上 指两个连续 天线之间的距离。 因此,这里的 d 是两个 RX 天线之间的 距离,θ 是 物体相对于 雷达的达到角度。 这是与第一个 天线相比,射线 到第二个天线的 额外距离。 使用基本的 几何学知识, 您可发现这是 一个直角三角形, 其中斜边为 d, 以及这个角 θ。 因此,射线必须 传播的该额外距离 结果为 dsin(θ)。 那么,发射器天线发射 一个线性调频脉冲帧, 每个天线会 接收该数据。 每个天线会 处理该数据, 以创建一个 2D-FFT 矩阵,其中包含 与物体的距离和 速度相对应的峰值。 那么,这里是 与该接收器 相对应的 2D-FFT 峰值,以及 与该接收器相对应的另一个 2D-FFT 矩阵。 请注意,峰值的 位置将几乎 与这两个 2D-FFT 相同。 我们先前 已讨论过, 峰值位置对雷达 与物体之间 距离的微小 变化非常 敏感。 不过,这两个 峰值之间的 相位差将为 2πdsin(θ), dsin(θ) 是 额外的距离, 然后除以 λ。 您通过比较 这两个信号, 这两个峰值处的 信号来测量 该相位差之后, 您可以求 该公式的反函数, 以计算到达角。 如果您看看该表达式, ω 等于 2πdsin(θ) 除以 λ, 您会发现, 由于 sin(θ),我们 要估算的量,即 θ, 与所测量的 相位差 ω 之间的 关系是 非线性的。 那么,这是在该系列中 我们第一次遇到 这种情况。 那么,您可以 回想一下, 第二个模块中 速度估算中的 表达式为 ω 等于 4πVTc 除以 λ。 您可以看到, 估算的相位差 以线性方式 依赖于速度。 类似地,在第一个 模块中,IF 频率 与距离之间 具有线性关系。 因此,如果您看看 该 sin(θ) 与 θ 图, 当 θ 接近于 0 时,sin(θ) 对 θ 非常敏感。 因此,θ 的微小变化会 导致 sin(θ) 产生同等 大小的变化。 但该敏感性会随着 θ 的增大而减低。 当 θ 接近于 90 时,sin(θ) 变得 对 θ 非常 不敏感。 因此,随着 θ 逐渐增大, θ 估算越来越容易 产生误差。 这里的图对此 进行了显示。 当物体位于雷达 正前方时,角度 估算会达到最佳值。 这意味着 θ 等于 0。 随着 θ 逐渐增大 并接近于 90 度, 当然,由于存在 噪声,估算准确性 会下降。 在前面的模块中, 当我们讨论速度 估算时, 我们看到 雷达能够不模糊 测量的速度具有 上限。 我们将此称为 雷达的最大速度。 雷达可以测量的最大 不模糊角度是否存在 类似的限制? 这正是我们要在该 幻灯片中讨论的内容。 那么,如果您将 这想象成表示 与雷达左侧物体的 2D-FFT 峰值相对应的 相量,当您从 第一个 RX 天线 转到第二个 RX 天线时,该相量 沿逆时针方向移动。 类似地,对于雷达 右侧的物体,相量 将沿顺时针方向 移动,如此处所示。 因此,只要 沿顺时针 或逆时针 方向的移动 小于 180 度 或 π 弧度, 对该移动的测量 就是不模糊的。 如果情况不是 这样,如此处所示, 该相量从这里 移动到这里, 那么您就无法 分辨该移动 是沿逆时针方向 移动了相应的度数, 还是沿顺时针方向 移动了 b 度数。 因此,基本而言, 速度的不模糊 测量要求两个 天线之间的 相位变化 小于 180 度。 然后,插入前面的 幻灯片中的 ω 值, 并稍微对其 进行重新排列, 我们看到 雷达可以 测量的最大 角度必须小于 这里的表达式。 λ 除以 2d 的反正弦, 其中 d 是两个 天线之间的距离。 所以,此处的重点是, 两个天线之间的 距离 d 可以服务的 最大视场为 θmax 等于 λ 除以 2d 的反正弦。 请注意,在两个天线之间,λ 除以 2 再除以距离 d 可导致 最大的可能 视场正 90 度 或负 90 度。 到目前为止,我们 已经讨论了雷达 前方的单个物体, 以及通过测量两个 RX 天线之间的 相位差来估算 其到达角。 现在请考虑雷达 前方的两个物体, 它们相对于雷达具有 相同的距离和相同的 速度,这样 这两个物体 将处于 2D-FFT 中 相同的距离速度单元。 那么,这是来自 第一个天线的 2D-FFT。 这是来自第二个 天线的 2D-FFT。 因此该 2D-FFT 中 有单个峰值。 但峰值处的信号 将具有来自对应于 这两个物体的相量的 贡献,这里对这个天线 进行了说明, 这里对第二个 天线进行了说明。 因此,我们 先前讨论的 简单相位比较 技术将不再适用。 解决方案是什么? 它将非常类似于我们 先前对速度模块采取的 解决方案。 我们将 RX 天线的 数量从两个增加到 N 个,并创建 N 个 接收天线的区域, 所有这些 天线处的 二维 FFT 将在同一个 位置具有一个峰值。 该系列峰值处的 信号将创建一个 包含两个旋转 相位的离散序列, 如此处所示。 该序列上的 FFT 将显示为 ω1 和 ω2 处的两个峰值, 其中 ω1 和 ω2 是两个物体的旋转 速度,以每个样本的 弧度数为单位。 那么,您通过 FFT 读取 这两个峰值的位置, 然后反演计算 两个物体的 到达角, 如此处所示。 我们将此处 在 RX 天线上 执行的特定 FFT 称为角度 FFT。 现在我们已经 介绍了角度 FFT, 那么下一个 问题自然是, 该 FFT 的分辨率 是多少? 该问题针对两个 物体,它们相对于 雷达分别具有 θ 和 θ 加 Δθ 的 到达角。 当两个物体在角度 FFT 中显示为不同的 峰值时,Δθ 可以 达到多小的值? 我们已经在 模块 1 中针对 距离分辨率以及 在模块 2 中针对 速度分辨率解决了该问题。 在这里,我们将针对 角度分辨率执行非常 类似的操作。 要针对角度 分辨率推导 该表达式,只需 记住以下要点: 到达角为 θ 的物体具有 离散频率 ω, 它为 2πdsin(θ) 除以 λ,d 为两个 天线之间的距离。 频域中距离的 标准是,角频率的 距离 Δω 必须大于 2π 除以 N,N 为 FFT 中的 样本数。 那么,此时, 您或许可以 暂停视频,尝试自己 推导出该表达式。 到达角 分别为 θ 和 θ 加 Δθ 的两个 物体将通过 这里的表达式 区分其离散频率。 现在,为了简化 该表达式,您应该 记得在微积分中, sin(θ) 的导数是 cos(θ), 这意味着 对应的微小 变化 Δθ 的 sin(θ) 变化率 等于 cos(θ)。 因此,我可以将这里的 表达式替换为 cos(θ) 乘以 Δθ,就像这样。 此外,请回忆一下 我们在模块 2 中 讨论过的离散 傅里叶变换的 特性,对于我们 要在频域中分隔的 两个峰值, 其角频率的 距离应大于 2π 除以 N, N 为 FFT 的 样本输入 数量,在本例中 也是阵列中 天线的数量。 那么,替换 此处的表达式, 我得到这个不等式,然后 稍微对其进行重新排列, 我得到这个 不等式,它 实际上是表示雷达 分辨率角度的表达式。 还要注意,由于 N 是阵列中 天线的数量,d 是两个 连续天线之间的距离, 因此 N 乘以 d 实际上是 天线阵列的长度。 因此,您可以说 角分辨率随着 接收器天线阵列 长度的增大而增大。 现在,当我们 说分辨率时, 通常假设两个天线之间的 距离为 λ 除以 2,并且 θ 为 0。 在该表达式中 替换它,您将 得到该表示分辨率 角度的表达式, 它实际上 取决于 θ 和天线间距。 需要记住的一点是, 这里的表达式实际上 以弧度为单位。 因此,您需要 将其乘以 180 再除以 π,以将其 转换为度数。 如果您看看该 表达式,有一点 很有意思,即分辨率 角度取决于 θ。 这在距离 或速度 背景中 未出现过。 因此距离和 速度分辨率 都独立于实际的 距离和速度值。 其原因还是在于 sin(θ) 的不一致 特性。 因此,对于由 Δθ 分隔的两个物体, 其在角度 FFT 中的 角频率在 θ 等于 0 时实际上 离得更远, 并且随着 θ 的增大 彼此越来越靠近, 即使在两种 情况下距离 Δθ 相同也是如此。 正如您现在可能 已经了解的那样, FMCW 雷达中的角度 估算和速度估算 取决于非常类似的概念。 实际上, 数学基础 几乎是相同的。 因此,我认为通过 一个幻灯片来比较 这两者应该有所帮助。 角度估算利用线性 调频脉冲之间的 相位变化,这些脉冲 在空间上是分离的。 速度估算也 利用相位变化, 但它是针对在时间上 分离的线性调频脉冲。 角度分辨率取决于 天线阵列长度。 请注意,Nd 实际上 是天线阵列的 总长度。 因此,角度分辨率 与天线阵列的长度 成反比。 速度估算值 与帧的长度 成反比。 可以不模糊 测量的最大 角度取决于两个 连续天线之间的 距离 d。 该距离越小, θmax 就越大。 可以不模糊 测量的最大 速度取决于连续线性 调频脉冲之间的时间 Tc。 类似地,Tc 越小, Vmax 就越大。 此幻灯片总结了 角度估算过程, 并将其置于 FMCW 雷达系统的背景中。 那么,您具有合成器 synth,也称为 LO 或本机 振荡器,它可以生成 线性调频脉冲。 线性调频脉冲由 发射天线进行发射。 它从雷达前方的 物体上进行反射。 在每个接收 天线处接收 反射信号。 synth 信号路由到 其中的每个 RX 天线,接收到的信号 与 LO 信号混合, 以创建 IF 信号。 IF 信号经过低通滤波器, 并由 ADC 进行采样。 该 ADC 数据在整个 帧中进行处理, 以创建一个 2D-FFT 网格, 针对每个 RX 天线创建一个 此类 2D-FFT 网格。 该 2D-FFT 网格中的 峰值与物体的距离 和速度相对应。 该系列 TX 天线中对应 峰值上的 FFT 称为角度 FFT, 该角度 FFT 中的峰值 直接对应于 物体的到达角。 我要通过一个简短的 问题来结束该模块。 那么,您有两个 静止的物体, 它们到雷达的 距离相等。 该雷达具有一个发射 天线和两个接收天线。 是否可以使用 该雷达估算 这两个物体的 到达角? 请考虑一下 这个问题。 总之,该模块 就到此结束了。 我希望通过 模块 1 至 5, 您已经对使用 FMCW 雷达进行毫米波 传感有了一定的了解, 并且希望您喜欢它。 我们希望将来 以您到目前为止 学习到的内容为基础 添加更多的模块。
欢迎观看有关 FMCW 雷达的 本介绍性系列的
第五个模块。
前面的四个 模块重点介绍
沿距离和速度 两个维度进行感应。
该模块将重点 介绍沿第三个
维度,即角度, 进行感应。
因此,我们要在 本模块中回答的
问题 就是,您有
一个雷达,它前面 有一个物体,
雷达如何 估算该物体的
到达角?
如果在不同的角度 存在多个物体,但可能
具有相同的距离和相同的 相对速度,会怎么样?
雷达的最大 角度视场
有哪些决定因素?
雷达的角度分辨率 取决于什么?
回忆一下我们之前的 模块内容,您应该记得,
IF 信号的相位对物体 距离的微小变化非常
敏感,具体而言, 物体距离的微小
变化 Δd 会导致 相位变化 ω,
其值为 4πΔd 除以 λ。
角度估算利用了 类似的概念。
角度估算需要 至少 2 个 RX 天线。
这里利用的 是物体相对
每个天线的 差分距离。
那么,发射天线 发射一个线性
调频脉冲信号。
它在物体上进行 反射,您可以想象
一束射线从物体 到达第一个 RX
天线,另一束射线 从物体到达第二个
RX 天线。
在该示例中,到达第二个 RX 天线的射线必须
传播稍远一点的距离, 即额外的距离 Δd,
才能到达那里。
该额外的距离会导致 额外的相位 ω,它等于
2πΔd 除以 λ。
这便是该 天线处的信号
和该天线处的 信号之间的相位差。
因此,我们可以在这里 看到,这两个表达式
非常类似,实际上, 除了因数 2 之外,
它们几乎是相同的。
接下来,请您思考 下面的问题。
这两个表达式为什么 具有因数 2 的差异?
这个图说明了 该额外距离
与到达角的 相关性。
假设与两个 天线之间的
该距离 d 相比, 物体足够远,
从而可以假设从物体 到达 RX 天线的射线
是平行的。
抱歉, 我滥用了符号。
在该模块的后续 部分,d 实际上
指两个连续 天线之间的距离。
因此,这里的 d 是两个 RX
天线之间的 距离,θ 是
物体相对于 雷达的达到角度。
这是与第一个 天线相比,射线
到第二个天线的 额外距离。
使用基本的 几何学知识,
您可发现这是 一个直角三角形,
其中斜边为 d, 以及这个角 θ。
因此,射线必须 传播的该额外距离
结果为 dsin(θ)。
那么,发射器天线发射 一个线性调频脉冲帧,
每个天线会 接收该数据。
每个天线会 处理该数据,
以创建一个 2D-FFT 矩阵,其中包含
与物体的距离和 速度相对应的峰值。
那么,这里是 与该接收器
相对应的 2D-FFT 峰值,以及 与该接收器相对应的另一个
2D-FFT 矩阵。
请注意,峰值的 位置将几乎
与这两个 2D-FFT
相同。
我们先前 已讨论过,
峰值位置对雷达 与物体之间
距离的微小 变化非常
敏感。
不过,这两个 峰值之间的
相位差将为 2πdsin(θ),
dsin(θ) 是 额外的距离,
然后除以 λ。
您通过比较 这两个信号,
这两个峰值处的 信号来测量
该相位差之后, 您可以求
该公式的反函数, 以计算到达角。
如果您看看该表达式, ω 等于 2πdsin(θ)
除以 λ, 您会发现,
由于 sin(θ),我们 要估算的量,即 θ,
与所测量的 相位差 ω 之间的
关系是 非线性的。
那么,这是在该系列中 我们第一次遇到
这种情况。
那么,您可以 回想一下,
第二个模块中 速度估算中的
表达式为 ω 等于 4πVTc 除以 λ。
您可以看到, 估算的相位差
以线性方式 依赖于速度。
类似地,在第一个 模块中,IF 频率
与距离之间 具有线性关系。
因此,如果您看看 该 sin(θ) 与 θ 图,
当 θ 接近于 0 时,sin(θ) 对 θ
非常敏感。
因此,θ 的微小变化会 导致 sin(θ) 产生同等
大小的变化。
但该敏感性会随着 θ 的增大而减低。
当 θ 接近于 90 时,sin(θ) 变得
对 θ 非常 不敏感。
因此,随着 θ 逐渐增大, θ 估算越来越容易
产生误差。
这里的图对此 进行了显示。
当物体位于雷达 正前方时,角度
估算会达到最佳值。
这意味着 θ 等于 0。
随着 θ 逐渐增大 并接近于 90 度,
当然,由于存在 噪声,估算准确性
会下降。
在前面的模块中, 当我们讨论速度
估算时, 我们看到
雷达能够不模糊 测量的速度具有
上限。
我们将此称为 雷达的最大速度。
雷达可以测量的最大 不模糊角度是否存在
类似的限制?
这正是我们要在该 幻灯片中讨论的内容。
那么,如果您将 这想象成表示
与雷达左侧物体的 2D-FFT 峰值相对应的
相量,当您从 第一个 RX 天线
转到第二个 RX 天线时,该相量
沿逆时针方向移动。
类似地,对于雷达 右侧的物体,相量
将沿顺时针方向 移动,如此处所示。
因此,只要 沿顺时针
或逆时针 方向的移动
小于 180 度 或 π 弧度,
对该移动的测量 就是不模糊的。
如果情况不是 这样,如此处所示,
该相量从这里 移动到这里,
那么您就无法 分辨该移动
是沿逆时针方向 移动了相应的度数,
还是沿顺时针方向 移动了 b 度数。
因此,基本而言, 速度的不模糊
测量要求两个 天线之间的
相位变化 小于 180 度。
然后,插入前面的 幻灯片中的 ω 值,
并稍微对其 进行重新排列,
我们看到 雷达可以
测量的最大 角度必须小于
这里的表达式。
λ 除以 2d 的反正弦, 其中 d 是两个
天线之间的距离。
所以,此处的重点是, 两个天线之间的
距离 d 可以服务的 最大视场为 θmax
等于 λ 除以 2d 的反正弦。
请注意,在两个天线之间,λ 除以 2 再除以距离 d 可导致
最大的可能 视场正 90 度
或负 90 度。
到目前为止,我们 已经讨论了雷达
前方的单个物体, 以及通过测量两个
RX 天线之间的 相位差来估算
其到达角。
现在请考虑雷达 前方的两个物体,
它们相对于雷达具有 相同的距离和相同的
速度,这样 这两个物体
将处于 2D-FFT 中 相同的距离速度单元。
那么,这是来自 第一个天线的 2D-FFT。
这是来自第二个 天线的 2D-FFT。
因此该 2D-FFT 中 有单个峰值。
但峰值处的信号 将具有来自对应于
这两个物体的相量的 贡献,这里对这个天线
进行了说明, 这里对第二个
天线进行了说明。
因此,我们 先前讨论的
简单相位比较 技术将不再适用。
解决方案是什么?
它将非常类似于我们 先前对速度模块采取的
解决方案。
我们将 RX 天线的 数量从两个增加到
N 个,并创建 N 个 接收天线的区域,
所有这些 天线处的
二维 FFT 将在同一个 位置具有一个峰值。
该系列峰值处的 信号将创建一个
包含两个旋转 相位的离散序列,
如此处所示。
该序列上的 FFT 将显示为 ω1
和 ω2 处的两个峰值, 其中 ω1 和 ω2
是两个物体的旋转 速度,以每个样本的
弧度数为单位。
那么,您通过 FFT 读取 这两个峰值的位置,
然后反演计算 两个物体的
到达角, 如此处所示。
我们将此处 在 RX 天线上
执行的特定 FFT 称为角度 FFT。
现在我们已经 介绍了角度 FFT,
那么下一个 问题自然是,
该 FFT 的分辨率 是多少?
该问题针对两个 物体,它们相对于
雷达分别具有 θ 和 θ 加 Δθ 的
到达角。
当两个物体在角度 FFT 中显示为不同的
峰值时,Δθ 可以 达到多小的值?
我们已经在 模块 1 中针对
距离分辨率以及 在模块 2 中针对
速度分辨率解决了该问题。
在这里,我们将针对 角度分辨率执行非常
类似的操作。
要针对角度 分辨率推导
该表达式,只需 记住以下要点:
到达角为 θ 的物体具有
离散频率 ω, 它为 2πdsin(θ)
除以 λ,d 为两个 天线之间的距离。
频域中距离的 标准是,角频率的
距离 Δω 必须大于
2π 除以 N,N 为
FFT 中的 样本数。
那么,此时, 您或许可以
暂停视频,尝试自己 推导出该表达式。
到达角 分别为 θ
和 θ 加 Δθ 的两个
物体将通过 这里的表达式
区分其离散频率。
现在,为了简化 该表达式,您应该
记得在微积分中, sin(θ) 的导数是 cos(θ),
这意味着 对应的微小
变化 Δθ 的 sin(θ)
变化率 等于 cos(θ)。
因此,我可以将这里的 表达式替换为 cos(θ) 乘以
Δθ,就像这样。
此外,请回忆一下 我们在模块 2 中
讨论过的离散 傅里叶变换的
特性,对于我们 要在频域中分隔的
两个峰值, 其角频率的
距离应大于 2π 除以 N,
N 为 FFT 的 样本输入
数量,在本例中 也是阵列中
天线的数量。
那么,替换 此处的表达式,
我得到这个不等式,然后 稍微对其进行重新排列,
我得到这个 不等式,它
实际上是表示雷达 分辨率角度的表达式。
还要注意,由于 N 是阵列中
天线的数量,d 是两个 连续天线之间的距离,
因此 N 乘以 d 实际上是
天线阵列的长度。
因此,您可以说 角分辨率随着
接收器天线阵列 长度的增大而增大。
现在,当我们 说分辨率时,
通常假设两个天线之间的 距离为 λ 除以 2,并且
θ 为 0。
在该表达式中 替换它,您将
得到该表示分辨率 角度的表达式,
它实际上 取决于 θ
和天线间距。
需要记住的一点是, 这里的表达式实际上
以弧度为单位。
因此,您需要 将其乘以 180
再除以 π,以将其 转换为度数。
如果您看看该 表达式,有一点
很有意思,即分辨率 角度取决于 θ。
这在距离 或速度
背景中 未出现过。
因此距离和 速度分辨率
都独立于实际的 距离和速度值。
其原因还是在于 sin(θ) 的不一致
特性。
因此,对于由 Δθ 分隔的两个物体,
其在角度 FFT 中的 角频率在 θ 等于
0 时实际上 离得更远,
并且随着 θ 的增大 彼此越来越靠近,
即使在两种 情况下距离
Δθ 相同也是如此。
正如您现在可能 已经了解的那样,
FMCW 雷达中的角度 估算和速度估算
取决于非常类似的概念。
实际上, 数学基础
几乎是相同的。
因此,我认为通过 一个幻灯片来比较
这两者应该有所帮助。
角度估算利用线性 调频脉冲之间的
相位变化,这些脉冲 在空间上是分离的。
速度估算也 利用相位变化,
但它是针对在时间上 分离的线性调频脉冲。
角度分辨率取决于 天线阵列长度。
请注意,Nd 实际上 是天线阵列的
总长度。
因此,角度分辨率 与天线阵列的长度
成反比。
速度估算值 与帧的长度
成反比。
可以不模糊 测量的最大
角度取决于两个 连续天线之间的
距离 d。
该距离越小, θmax 就越大。
可以不模糊 测量的最大
速度取决于连续线性 调频脉冲之间的时间 Tc。
类似地,Tc 越小, Vmax 就越大。
此幻灯片总结了 角度估算过程,
并将其置于 FMCW 雷达系统的背景中。
那么,您具有合成器 synth,也称为 LO 或本机
振荡器,它可以生成 线性调频脉冲。
线性调频脉冲由 发射天线进行发射。
它从雷达前方的 物体上进行反射。
在每个接收 天线处接收
反射信号。
synth 信号路由到 其中的每个 RX
天线,接收到的信号 与 LO 信号混合,
以创建 IF 信号。
IF 信号经过低通滤波器, 并由 ADC 进行采样。
该 ADC 数据在整个 帧中进行处理,
以创建一个 2D-FFT 网格, 针对每个 RX 天线创建一个
此类 2D-FFT 网格。
该 2D-FFT 网格中的 峰值与物体的距离
和速度相对应。
该系列 TX 天线中对应
峰值上的 FFT 称为角度 FFT,
该角度 FFT 中的峰值
直接对应于 物体的到达角。
我要通过一个简短的 问题来结束该模块。
那么,您有两个 静止的物体,
它们到雷达的 距离相等。
该雷达具有一个发射 天线和两个接收天线。
是否可以使用 该雷达估算
这两个物体的 到达角?
请考虑一下 这个问题。
总之,该模块 就到此结束了。
我希望通过 模块 1 至 5,
您已经对使用 FMCW 雷达进行毫米波
传感有了一定的了解, 并且希望您喜欢它。
我们希望将来 以您到目前为止
学习到的内容为基础 添加更多的模块。
手机看
扫码用手机观看
 视频简介
视频简介
1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
所属课程:mmWave系列培训
发布时间:2017.07.25
视频集数:28
本节视频时长:00:18:52
毫米波传感介绍:FMCW雷达 - 模块5:角度估计的相关介绍。



 未学习 1.1 毫米波传感介绍:FMCW雷达 - 模块1:范围估计
未学习 1.1 毫米波传感介绍:FMCW雷达 - 模块1:范围估计
 未学习 1.2 毫米波传感介绍:FMCW雷达 - 模块2:IF信号的相位
未学习 1.2 毫米波传感介绍:FMCW雷达 - 模块2:IF信号的相位
 未学习 1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计
未学习 1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计
 未学习 1.4 毫米波传感介绍:FMCW雷达 - 模块4:一些系统设计讨论
未学习 1.4 毫米波传感介绍:FMCW雷达 - 模块4:一些系统设计讨论
 未学习 1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
未学习 1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
 未学习 2.1 TI汽车mmWave传感器设备概述
未学习 2.1 TI汽车mmWave传感器设备概述
 未学习 2.2 TI工业mmWave传感器器件概述
未学习 2.2 TI工业mmWave传感器器件概述
 未学习 2.3 mmWave SDK简介
未学习 2.3 mmWave SDK简介
 未学习 2.4 mmWave雷达编程模型
未学习 2.4 mmWave雷达编程模型
 未学习 2.5 mmWave EVMs深入学习
未学习 2.5 mmWave EVMs深入学习
 未学习 2.6 mmWave波形传感器简介1443硬件加速器
未学习 2.6 mmWave波形传感器简介1443硬件加速器
 未学习 3.1 mmWave SDK EVM开箱即用演示
未学习 3.1 mmWave SDK EVM开箱即用演示
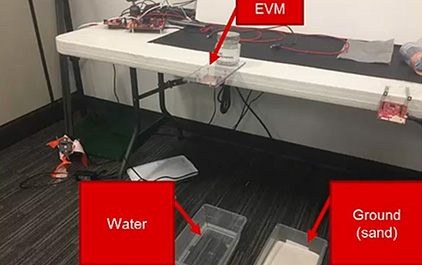
 未学习 3.2 mmWave水VS地面分类实验
未学习 3.2 mmWave水VS地面分类实验
 未学习 3.3 mmWave生命体征实验
未学习 3.3 mmWave生命体征实验
 未学习 (中文)机器人如何利用mmWave实现“传感和避障”
未学习 (中文)机器人如何利用mmWave实现“传感和避障”
 未学习 (中文)mmWave与机器人:深度技术探究
未学习 (中文)mmWave与机器人:深度技术探究
 未学习 (中文)DCA1000 培训视频
未学习 (中文)DCA1000 培训视频

















