
电机驱动
最新课程
- 解决汽车摄像头模块中的设计难题
- 利用智能传感激发创新
- 利用 TI 的逻辑封装创新节省电路板空间
- 比较三相工业系统的交流/直流电源转换拓扑
- 三相工业系统的交流/直流(AC-DC)电源转换拓扑
- TI 高压研讨会
- 从零开始学 PSpice® for TI 仿真工具 - 手把手操作实训课程
- 高压系统功能安全简介
- 揭秘高压应用安规中的电气间隙和爬电距离
- 管理微型逆变器中的电源转换挑战
热门课程
C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)



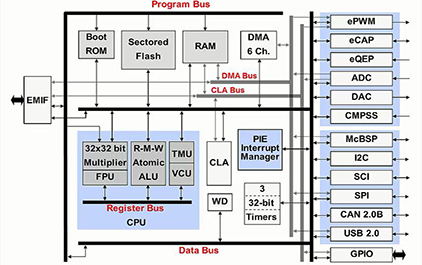
eCAP模块也是主要的C2000的控制模块
主要有两个功能 辅助外部系统时钟频率
和生成一个简单的PWM波形
eCap的主要模型 就是捕捉输入信号频率
或者占空比的一个模块
主要有一个32位计数器
输入时钟最快达到200兆
以及内部的四个捕捉寄存器
用于存储捕捉事件发生时计时器的技术值
急性选择寄存器
可以选择这四个寄存器
捕捉时刻电频跳变的模式
当然可以是从低变高 或者是从高变低
来组成
最后可以通过分频模块对输入信号进行分频
eCAP模块 也可以用于输出一个简单的PWM
用于驱动风扇 LED灯等简单功能
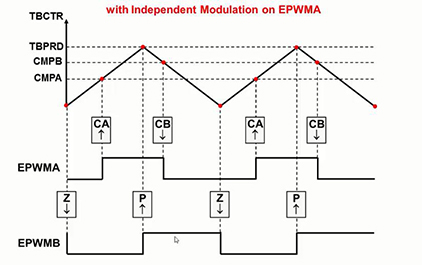
同样这个技术下 32位计数器就是时机
相当于PWM的TB模型的TBCPR
CAP1作为TPPRD计算器
可以设定输出PWM的周期
CAP3是CAP1的shadow
而CAP2作为compare计算器
当TBCPR等于CAP2的值的时候
输出就可以翻转 CAP4就是CAP2的shadow
所以 这模式下 eCAP管脚可以输出一个固定占空比的PWM波形
称为APWM 这个模式也叫做APWM模式
eCAP的主要寄存器前面已经介绍
下面具体看一下如何配置
ECCTL1的高八位 主要是用于时机在仿真模型下
如何运行 以及输入时钟分频数
以及使能eCAP模块的计数器
ECCTL1的低八位的CAPOL
因为设置CAP计算器
在收到何种出发信号后
再开始捕捉 可以设置上跳跃 还是下跳跃
CTRRST计算器用来连续计算模式
还是差值计算模式
简单说 就是一个跳沿触发事件出发后
是清楚当前计数器
还是继续计数 前者用于周期捕捉 后者用于占空比捕捉
ECCTL2计算器高八位可以设置APWM
在匹配占空比后是低电频还是高电频
CAP/APWM位可以设置
是当做eCAP捕捉模块 还是当做APWM模块使用
同时可以强制触发一次同步事件
eCAP也可以像PWM模块一样被同步
当收到信号 或事件调制为出发后
就会把CTRPHSD寄存器中的
值 相当于相位计算器
存储到TSCTR的周期计数器中
ECCTL2的第八位可以设置是否接受同步信号
以及收到同步信号后 如何传给eCAP模块
还可以停止实际接受技术
以及在顺序出发后
重新开始等待CAP1的事件还是停止
顺序出发时 是在一个eCAP时间出发后停止
以及单次捕捉出发 或者连续捕捉出发的设置
ECEINT用于手动设置中断
设置在时机等于周期值或者比较值时触发中断
并且可以使能是否允许中断异处功能
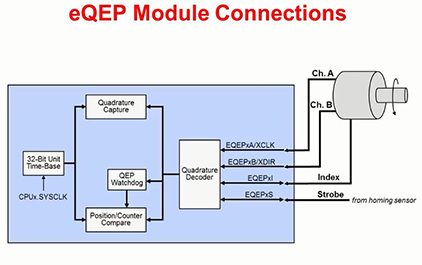
eQEP也是一个非常重要的控制外设
它的主要功能是为外部增量时
光电编码器 提供解码接口
可以更方便地使用硬件方式
到编码器角度值
图中Ch.A和Ch.B是编码器两个二极管的输出口
一般这两个二极管 都会发出相差四分之一度的信号
整理为输入信号就是为00、01、11 和10
这样的循环通过这个序列的解码 就能看到转速和方向
同样 QEP的基础也是一个32位的实际计数器
输入时钟是系统时钟
然后通过解码器 算出角度差的时间
从而算出转速和方向
连接方法只要将A线对A线 B线对B线
连接到QEP编码器
以及Index连接到I线就可以
-
 未学习 C2837x入门指南(一) — 概述
未学习 C2837x入门指南(一) — 概述
-
 未学习 C2837x入门指南(二) — 芯片架构
未学习 C2837x入门指南(二) — 芯片架构
-
 未学习 C2837x入门指南(三) — 开发环境
未学习 C2837x入门指南(三) — 开发环境
-
 未学习 C2837x入门指南(四) — 外设寄存器操作
未学习 C2837x入门指南(四) — 外设寄存器操作
-
 未学习 C2837x入门指南(五) — 复位和中断
未学习 C2837x入门指南(五) — 复位和中断
-
 未学习 C2837x入门指南(六) — 系统初始化
未学习 C2837x入门指南(六) — 系统初始化
-
 未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
未学习 C2837x入门指南(七) — 模拟子系统 ADC DAC CMP SDFM(上)
-
 未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
未学习 C2837x入门指南(八) — 模拟子系统 ADC DAC CMP SDFM(下)
-
 未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
未学习 C2837x入门指南(九) — 控制类外设PWM CAP QEP(上)
-
 未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
未学习 C2837x入门指南(十) — 控制类外设PWM CAP QEP(中)
-
 未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
未学习 C2837x入门指南(十一) — 控制类外设PWM CAP QEP(下)
-
 未学习 C2837x入门指南(十二) — DMA模块(上)
未学习 C2837x入门指南(十二) — DMA模块(上)
-
 未学习 C2837x入门指南(十三) — DMA模块(下)
未学习 C2837x入门指南(十三) — DMA模块(下)
-
 未学习 C2837x入门指南(十四) — CLA模块
未学习 C2837x入门指南(十四) — CLA模块
-
 未学习 C2837x入门指南(十五)—系统设计之调试仿真
未学习 C2837x入门指南(十五)—系统设计之调试仿真
-
 未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
未学习 C2837x入门指南(十六)—系统设计之EMIF外接存储器接口
-
 未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
未学习 C2837x入门指南(十七)—系统设计之Flash编程和配置
-
 未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
未学习 C2837x入门指南(十八)—系统设计之DCSM双代码安全模块
-
 未学习 C2837x入门指南(十九)—双内核之间的通信
未学习 C2837x入门指南(十九)—双内核之间的通信
-
 未学习 C2837x入门指南(二十)—通信系统之SPI
未学习 C2837x入门指南(二十)—通信系统之SPI
-
 未学习 C2837x入门指南(二十一)—通信系统之SCI
未学习 C2837x入门指南(二十一)—通信系统之SCI
-
 未学习 C2837x入门指南(二十二)—通信系统之McBSP
未学习 C2837x入门指南(二十二)—通信系统之McBSP
-
 未学习 C2837x入门指南(二十三)—通信系统之IIC
未学习 C2837x入门指南(二十三)—通信系统之IIC
-
 未学习 C2837x入门指南(二十四)—通信系统之USB
未学习 C2837x入门指南(二十四)—通信系统之USB
-
 未学习 C2837x入门指南(二十五)—通信系统之CAN
未学习 C2837x入门指南(二十五)—通信系统之CAN
-
 未学习 C2837x入门指南(二十六)—开发工具汇总
未学习 C2837x入门指南(二十六)—开发工具汇总
-
 未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
未学习 C2837x入门指南(二十七)—C2000开发所需软件工具(一)
-
 未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)
未学习 C2837x入门指南(二十八)—C2000开发所需软件工具(二)




























