
人工智能
最新课程
- TI 高精度实验室 - CPU内核
- 三种直流/直流控制模式的实际比较
- 电源多路复用器深度培训
- TI Edge AI Studio:用于边缘 AI 设计的免费软件开发工具
- Edge AI Studio 概述
- AM62A EVM 入门
- MSP430 微控制器 - 产品组合概述
- 使用 TI Wi-Fi6 简化物联网
- Wi-Fi 6 简介
- 连接:适用于高性能 MCU 的 Wi-Fi
热门课程
TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码






[音乐播放]
大家好,
我是 Jon Valvano。
本节课的第一块内容是 简介部分。
也就是这里的 机器人系统学习套件,
Maze Edition。
在该特定的 第一个模块中,
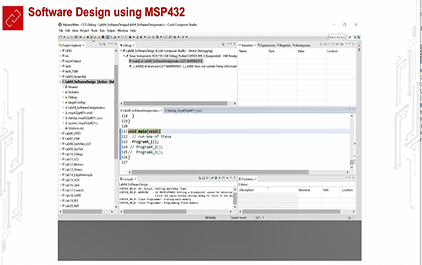
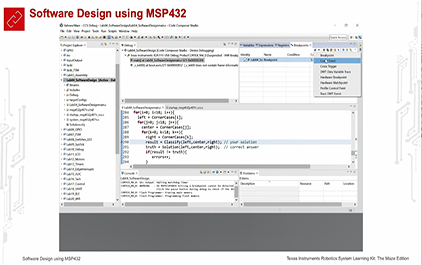
您的目标是安装 Code Composer Studio
并安装与这节课 相关的软件。
最终,我们将构建 并实现一个机器人。
那么,在该 特定的 PowerPoint 中,
我将介绍嵌入式 系统,以便您了解
这节课的各个部分 是围绕什么中心议题
展开的。
好,让我们开始吧。
那么,什么是嵌入式系统?
嵌入式系统是 一个具有大量
组件的系统。
我们将使用的 其中一个组件便是
微控制器, 在本例中是 MSP432。
此外还需要电气组件、 机械组件、化学组件、
传感器组件、电路组件。
总之,我们将使用这些 硬件和软件
来实现特定的用途。
在另一个案例中, 我们可能会赛车。
我们可能解决迷宫问题。
我们可能循线。
整个系统将专为 单个用途而设计,
所有组件将 相互同步工作,
以解决该问题。
因此,软件不是 用于解决世界上的
所有问题,而是 解决该特定的问题。
“嵌入式”一词 仅意味着它的
内部包含一个 微控制器。
因此,嵌入式 系统无处不在。
它们出现在通信、 汽车、军事、医疗、
消费、机械产品中。
任何包含电路的 设备都可能在其
内部的某个位置 具有一个微控制器,
用于执行该操作。
因此,您的汽车中 可能具有 20 台计算机。
您的家中可能 具有几百台计算机。
在一天中的 典型应用中,
您可能会与 其中几百个
日常使用的 微控制器进行交互。
因此,在本节课中, 我们将学习如何
对它们进行编程,如何使用 它们,如何部署它们,如何
测试它们。
这将是我们的目标。
我们如何划分 嵌入式系统或
描述其特性?
它会做出反应。
它与其实体 环境进行交互。
因此,我们可以具有输入。
我们可以做出决策。
我们可以具有输出。
对于嵌入式系统而言,时间 将是一个至关重要的参数,
因为我们不仅需要 获得正确的答案,
而且需要在正确的 时间获得正确的答案。
该时间要求 在嵌入式系统中
十分常见。
现在,它是一个系统。
那么,事实上, 系统本质上
是一个组件集合, 这些组件本身
是连接在一起的系统。
因此,如果我们有一个系统, 并且我们有第二个系统,
然后我们使它们相互 作用或将它们连在一起,
现在我们将具有一个更大的系统。
该系统可以与 另一个系统相连接。
因此, 该系统级开发
实际上具有分层结构, 其中我们从低级开始,
然后我们转向 中级,接着
再转向高级。
那么,随着我们对 本课程的学习,我们
将看到该嵌入式开发过程。
嵌入式系统要 解决以下两类问题。
也就是说,我们 如何实现这里的接口?
我们如何将 系统连在一起?
我们将在整个 课程中看到它们。
我们在嵌入式 系统世界中
看到的部分 理念是什么?
我们看到硬件和 软件之间的这种
紧密耦合。
因此,它不仅是一台计算机, 而且是一台正在执行某项
任务的计算机。
当我们查看一个 具有相互同步的
软件、数字逻辑和 模拟电路的典型
嵌入式系统时, 会发现这一点。
操作系统,也就是 这个用于管理它的
软件,非常重要。
因此,我们将看到, 我们需要部署的软件
将在管理我们的资源方面 具有至关重要的作用。
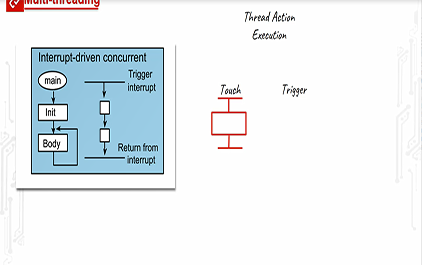
我们将看到 一些现象,例如
并发,其中我们 会同时执行两项
任务,但我们 会来回切换。
我们将实现并行, 其中我们会同时
执行两项任务,但我们 会完全同时执行它们。
或者,我们有一个系统, 并且有另一个系统,
我们需要在这 两者之间同步。
这是一项工程,因此 始终存在一种折衷。
该折衷通常发生在 性能与成本之间 --
无论成本是美元、 尺寸还是功率 --
并且我们的工作 将始终存在限制。
我们必须证明 事情是正确的。
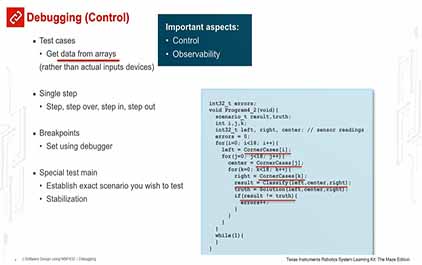
因此,您将在整个 课程中看到,我会
浓墨重彩地介绍我们 如何测试它是否正常工作。
因为,实际上, 嵌入式系统
部署在安全 关键情形中,
此时生命正处于危险之中。
因此,我们必须能够 测试我们的系统。
我们必须能够 了解它的工作
状况,并证明 它在正常工作。
我们的限制之一是功耗。
因此,我们将 始终关注功耗。
实际上,MSP432 是极好的
微控制器之一, 您可以通过非常高效的
方法来管理这些 微控制器的功耗。
如果我们看看 嵌入式系统,
我们可以看到 它们无处不在。
因此我们可以 考虑通用计算机。
我们可以考虑 机器人,比如
我们将在该课程中 实现的机器人,其中
我们将控制电机和传感器。
我们可以考虑 控制数据,就像
我们对手机或网络 所采取的操作那样。
因此,该类系统 实际上分解为
大量不同的单元, 所有这些单元都可以
在其解决方案中 部署一个嵌入式系统。
该课程的末尾 提供了几个
与物联网相关的实验。
我们将使用 蓝牙和 Wi-Fi。
这些是我们 在构建我们设计
嵌入式系统的能力时需要 放置在工具箱中的工具。
关于嵌入式系统, 我们能说些什么呢?
尺寸很重要。
我们希望它很小。
我们希望能够 随身携带它,
因此我们希望 它不会太重。
我们希望电池 能够长时间供电,
因此低功耗很重要。
它们必须在外面工作。
它们必须用于 二年级学生。
它的使用对象是年轻人, 因此会受到频繁的振动影响。
它必须位于我们的 汽车或我们的工厂中。
因此我们必须 解决大量的
环境问题。
我曾提到过, 安全很重要。
因此,我们不仅 必须使它工作,
而且必须证明 它能够正常工作。
当我们在嵌入式 系统世界中挣钱时,
我们要应对 低利润和高产量。
那么,这是嵌入式 系统所属的经济
类别。
时间很重要。
因此,我们可以通过 三种方式来定义时间。
硬件实时性意味着 绝不能超出时间
限制。
当我们发生 车祸时,我们
始终需要在毫秒级 时间之内展开安全气囊。
超出时间限制 是完全不能
接受的。
我们要将这 称为硬件实时性。
固实时意味着我们 将尽最大努力。
如果我们错过了 最后期限 -- 换句话说,
我们将在互联网上 发送音频包。
如果我们的音频包 之一丢失了,那么
该包的价值 将变为零。
但现在该系统 没那么重要。
因此,如果我发送五个 包,而不是六个包,
那么我仍可以听到声音。
它只是听起来 不是很好。
因此,我降低了它的价值。
如果我超出了该包的时间限制, 那么该包的价值将变为零。
但是,该系统的价值 仅降低了一点点。
软实时指的是, 如果某个包
本来应该在某个 特定的时间到达,
那么它达到得越晚, 它的价值就越小。
我超过最后期限的 时间越长,该包的价值
就会变得越小。
这通常是电子邮件或 Web 服务器等产品或服务。
我等待的时间越长,
我就会变得越不高兴。
但价值会随着 时间的推移而减小。
这是软实时。
那么,就机器人和 控制系统而言,
我们的大多数 时间限制将属于
硬实时类别。
我们不应该 超出任何限制。
我们将使用 中断来实现它。
总之,嵌入式系统 很容易对外界做出反应。
它们实时运行。
具体而言,我们 将重点关注硬实时,
因此我们绝不会超出最后期限。
我们将生活在一个 充满限制的世界中。
这个机器人必须 承担它的所有重量。
因此该单个电池必须 为整个机器人供电。
我们将看到,在我们的 世界中,嵌入式系统无处不在,
提高您的 嵌入式系统
技能将使您 更具就业优势。
因此,我建议您参加 本课程,但还要提醒您,
它不仅涉及数字逻辑。
它不仅涉及模拟逻辑。
它不仅涉及功耗。
它不仅涉及软件。
它是一个系统, 其中合并了所有
这些组件, 这些组件
与其他系统连接在一起, 其中接口非常重要。
每当我们 在安全关键型
嵌入式环境中部署 系统时,验证它是否
正常工作将始终是 我们的第一、第二
和最后一个目标。
祝您本次 课程学习愉快。
我们还有很长的路要走, 但您将一步一步地完成它。
祝您学得开心。
[音乐播放] 223
-
 未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器
未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器
-
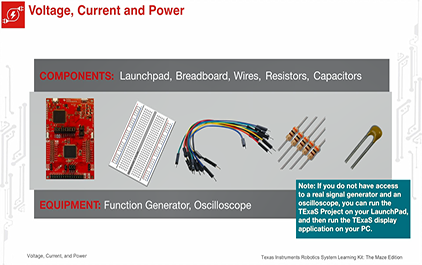
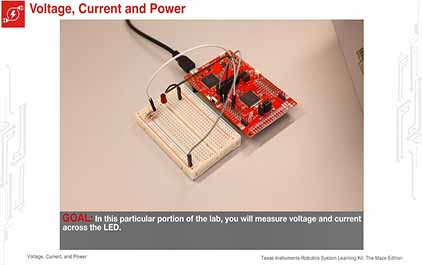
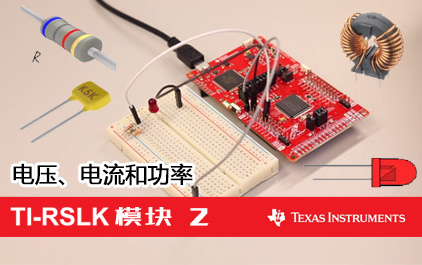 未学习 TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率
未学习 TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率
-
 未学习 TI-RSLK 模块 2 - 实验视频 2.1 – 测量电容器的阻抗
未学习 TI-RSLK 模块 2 - 实验视频 2.1 – 测量电容器的阻抗
-
 未学习 TI-RSLK 模块 2 - 实验视频 2.2 – LED (I,V) 响应曲线、指数关系
未学习 TI-RSLK 模块 2 - 实验视频 2.2 – LED (I,V) 响应曲线、指数关系
-
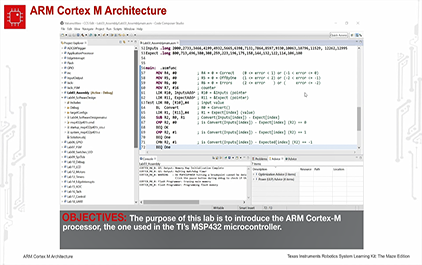
 未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 架构
未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 架构
-
 未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 组件
未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 组件
-
 未学习 TI-RSLK 模块 3 - 实验视频 3.1 - 调试解决方案、可视化、断点和单步执行
未学习 TI-RSLK 模块 3 - 实验视频 3.1 - 调试解决方案、可视化、断点和单步执行
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - C 语言编程
未学习 TI-RSLK 模块 4 - 讲座视频 - C 语言编程
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - 设计
未学习 TI-RSLK 模块 4 - 讲座视频 - 设计
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - 调试
未学习 TI-RSLK 模块 4 - 讲座视频 - 调试
-
 未学习 TI-RSLK 模块 4 - 实验视频 4.1 - 调试解决方案、可视化、变量、单步执行
未学习 TI-RSLK 模块 4 - 实验视频 4.1 - 调试解决方案、可视化、变量、单步执行
-
 未学习 TI-RSLK 模块 4 - 实验视频 4.2 - 调试解决方案、可视化、断点、单步执行
未学习 TI-RSLK 模块 4 - 实验视频 4.2 - 调试解决方案、可视化、断点、单步执行
-
 未学习 TI-RSLK 模块 5 - 讲座视频 - 电池和电压
未学习 TI-RSLK 模块 5 - 讲座视频 - 电池和电压
-
 未学习 TI-RSLK 模块 5 - 实验视频 5.1 - 测量电池的电压和电流
未学习 TI-RSLK 模块 5 - 实验视频 5.1 - 测量电池的电压和电流
-
 未学习 TI-RSLK 模块 5 - 实验视频 5.2 - 连接电机驱动器和配电板
未学习 TI-RSLK 模块 5 - 实验视频 5.2 - 连接电机驱动器和配电板
-
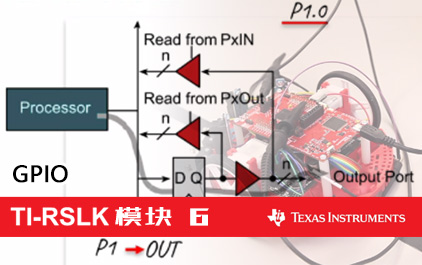 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
-
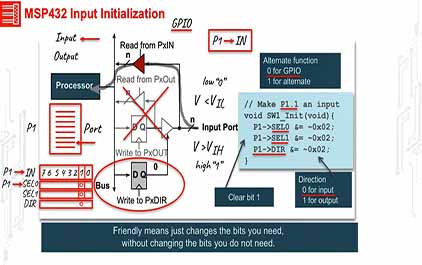 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
-
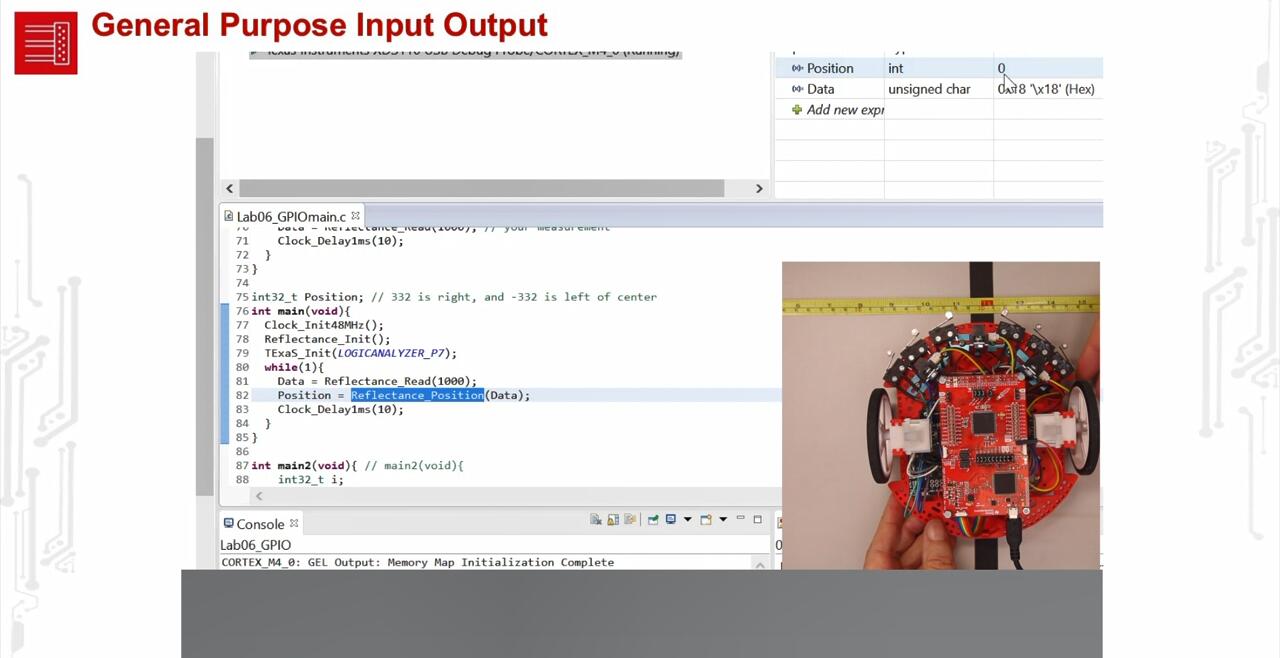
 未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
-
 未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
-
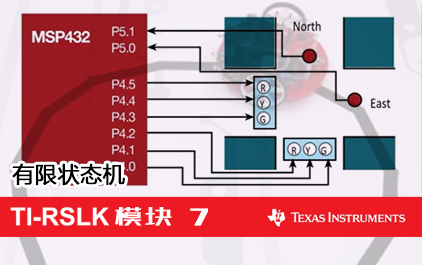 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
-
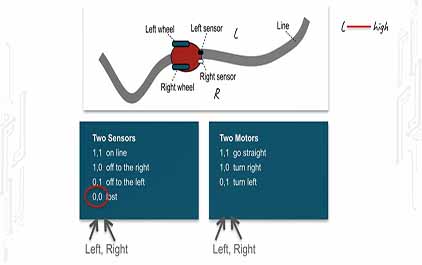 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
-
 未学习 TI-RSLK 模块 8 - 讲座视频第一部分 - 开关
未学习 TI-RSLK 模块 8 - 讲座视频第一部分 - 开关
-
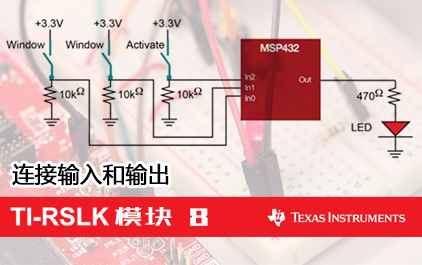
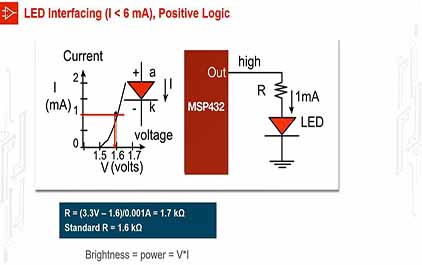 未学习 TI-RSLK 模块 8 - 讲座视频第二部分 - 连接输入和输出 - LED
未学习 TI-RSLK 模块 8 - 讲座视频第二部分 - 连接输入和输出 - LED
-
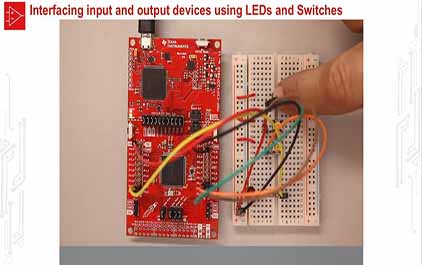 未学习 TI-RSLK 模块 8 - 实验视频 8.1 - 连接开关和 LED 以及调试
未学习 TI-RSLK 模块 8 - 实验视频 8.1 - 连接开关和 LED 以及调试
-
 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
-
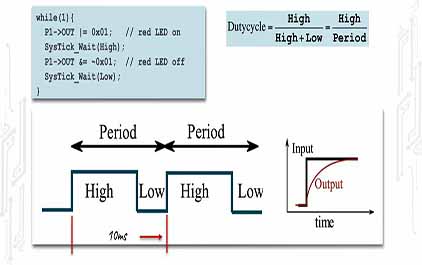 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率
未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
-
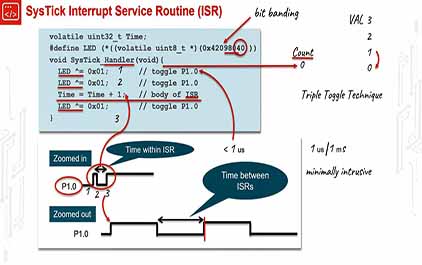 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
-
 未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
-
 未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
-
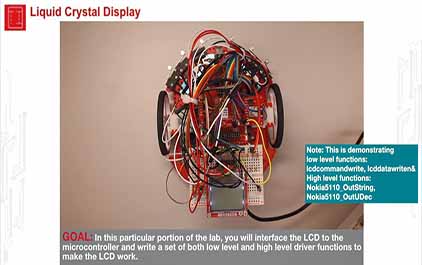 未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
-
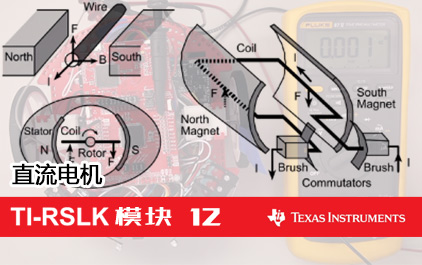 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
-
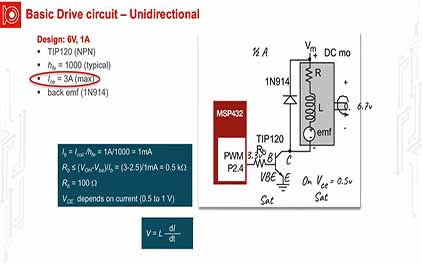 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
-
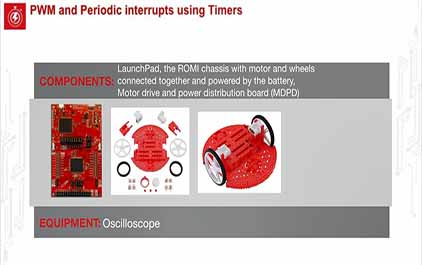
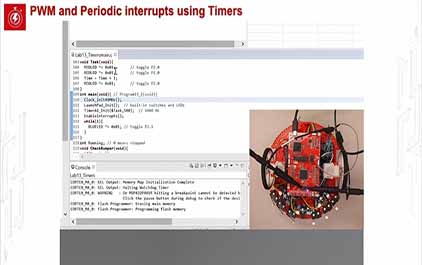
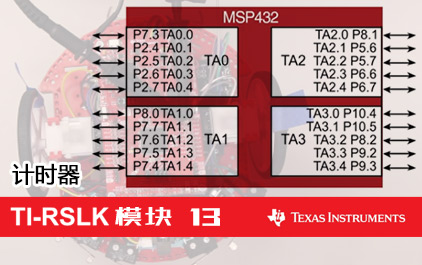 未学习 TI-RSLK 模块 13 - 讲座视频 - 周期性输入
未学习 TI-RSLK 模块 13 - 讲座视频 - 周期性输入
-
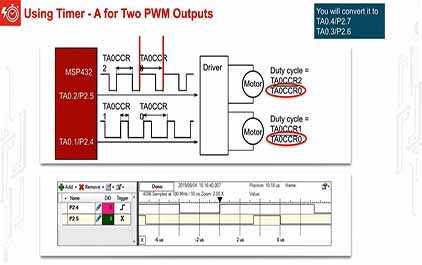 未学习 TI-RSLK 模块 13 - 讲座视频 - 脉宽调制
未学习 TI-RSLK 模块 13 - 讲座视频 - 脉宽调制
-
 未学习 TI-RSLK 模块 13 - 实验视频 13.1 - 通过计时器产生的 PWM 输出来旋转电机
未学习 TI-RSLK 模块 13 - 实验视频 13.1 - 通过计时器产生的 PWM 输出来旋转电机
-
 未学习 TI-RSLK 模块 13 - 实验视频 13.2 - 测量中断延迟
未学习 TI-RSLK 模块 13 - 实验视频 13.2 - 测量中断延迟
-
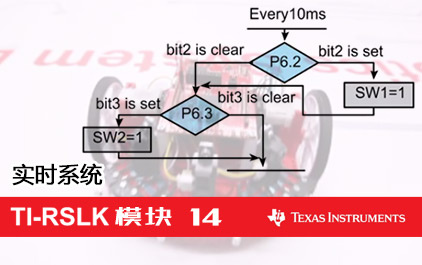 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
-
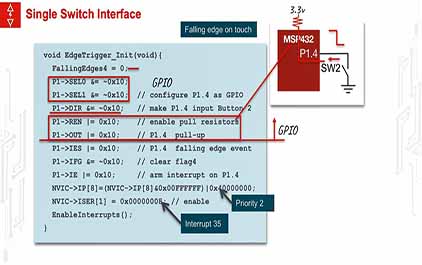 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
-
 未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应
未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应
-
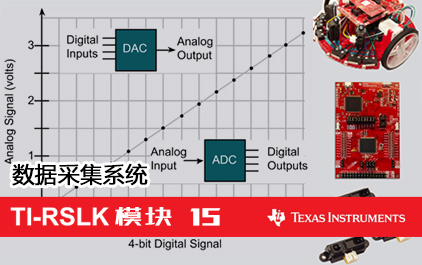 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
-
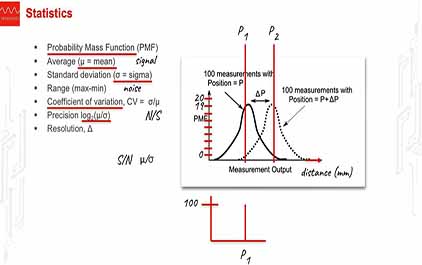 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
-
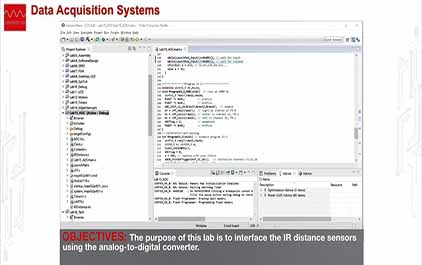 未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
-
 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
-
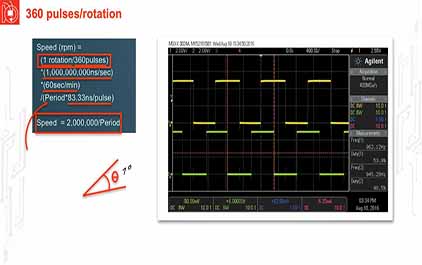 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
-
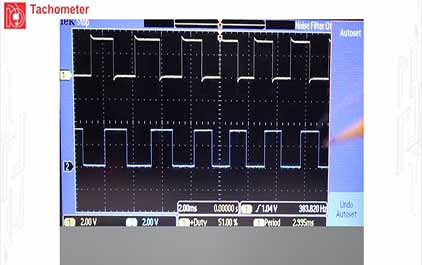 未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
-
 未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
-
 未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
-
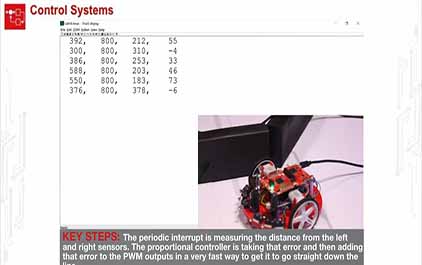 未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
-
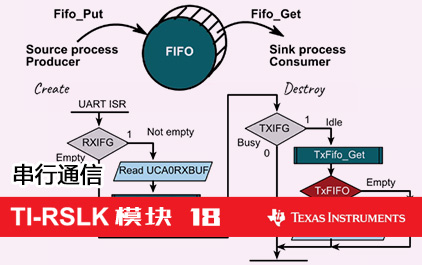 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
-
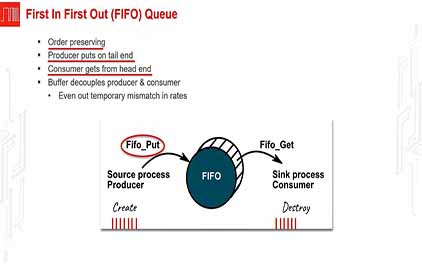 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
-
 未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
-
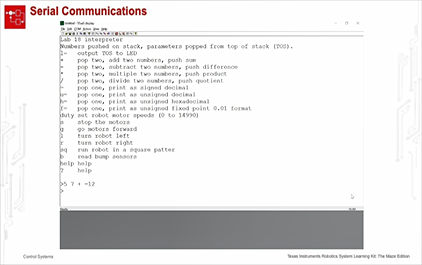 未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
-
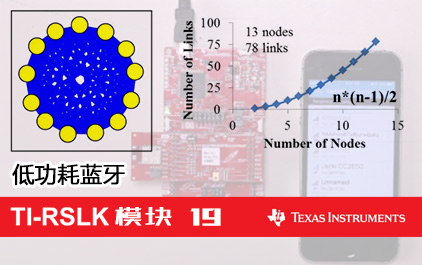 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
-
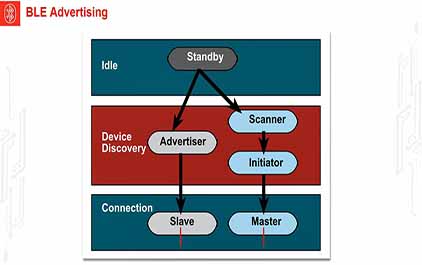 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
-
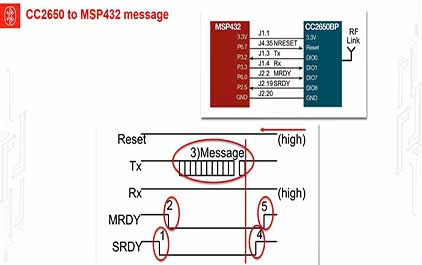 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
-
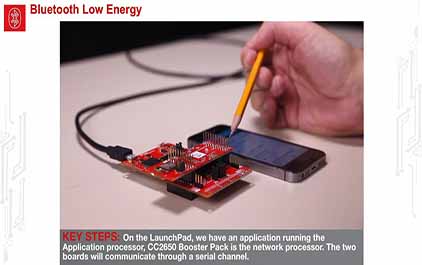 未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
-
 未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信
未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信




































































 视频简介
视频简介
TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
通过CCS和TI-RSLK软件安装介绍嵌入式系统。

