
LLC 控制器
最新课程
- 在机器人应用中利用毫米波技术
- 利用 TI 毫米波传感器的移动机器人应用
- 利用 TI 毫米波传感器的工业机器人应用
- CCS 和 C2000Ware 入门
- 介绍热门功率半导体
- 数字电源控制介绍
- Processor SDK
- 为您的设计找到合适的模拟电源控制器
- 高效 DCDC 转换器噪音和干扰抑制(上)
- 高效 DCDC 转换器噪音和干扰抑制(下)
热门课程
LLC 变换器小信号模型分析(下)


图上显示的是 LLC 小信号模型
两种情况
第一个是模型的特性
和仿真结果的对比
右侧的是模型的特性
和实际测试的结果对比
在左侧图上
红线是模型的特性曲线
蓝色的点是对应的仿真模型的结果
那么我们可以看到
模型和仿真的结果是非常的吻合
右侧是模型和实际
在实验室测试得到的结果
从图上的幅频特性和相频特性来看
模型和实际的测试结果测量数据
基本上是吻合的
那么在信号模型建立之后
接下来一个非常重要的目标就是
对被控的对象
或者说是模型
或者说是模型
怎么样进行补偿
得到一个稳定的系统
得到一个稳定的系统
得到一个比较好的闭环指标
达到我们所期望的动态响应特性
和抗干扰能力
以一个实际的系统为例
那么我们对一个四阶的 LLC 系统
进行降阶处理
得到一个类似二阶的双极点系统
以一个二阶的系统来近似
或者说是拟合我们对应
LLC 小信号模型
从图上我们可以看到
开环增益是85dB
Q 值是1.35
对应的极点位置是4k
那么要构成稳定的变换系统
需要确保相位裕量大于45°
幅值裕量大于10个dB
首先我们考虑用一个比较简单的
单极点双零点系统
来对 LLC 做补偿
那么我们选择相应的零点位置是4k
补偿网络的传递函数和波特图
如图上所示
最后我们可以得到
整个的闭环系统的特性
在图上的绿色曲线
表示的就是闭环特性
那么我们可以看到最终得到的
相位裕量是95°
幅值裕量十个dB
对应的穿越频率是3kHz
对补偿网络进行进一步提升之后
我们可以看到抗干扰能力
会得到进一步的增强
在给变换器进行控制回路补偿
或者说是在进行设计的时候
那我们需要考虑的另外一个
非常重要的地方就是
在不同的工作条件下不同的输入电压
不同的负载情况下
因为我们的系统是不是稳定的
我们的补偿,我们的控制
是不是有效的
从图上我们可以看出
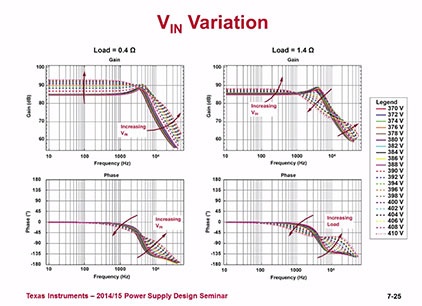
在输入电压370V到400V
负载从0.4Ω到1.4Ω
在变化的时候
那么整个的小信号模型
基本上是在一个比较小的范围内的
图上显示的是在两个负载条件下
在输入电压变化的时候
那么 LLC 的模型
它的变化范围是比较宽的
我们可以看到在0.4Ω的时候
那么它的增益会从八十几个dB
一直到90多个dB
相应的相位特性也是在变化的
那么从图上我们可以看到
在不同的输入电压和输出负载条件下
LLC 的小信号模型
它的变化范围是非常广的
对于控制回路的补偿
补偿控制器的设计
都是非常大的一个挑战
那么 TI 提供了相应的补偿工具软件
针对 UCD3138 数字控制器
那么我们对于 LLC 的拓扑
提供了 GUI 界面
在界面里面输入相应的
LLC 的常数和控制的期望的目标,那么
就可以自动生成相应的零极点位置
可以得到你期望的控制特性和闭环特性
同时会有一些比较简单的仿真结果
对应各个点的工作电压电流波形
通过使用软件
我们就可以对比较复杂的
LLC 小信号模型的补偿
控制进行简化
得到一个比较好的
控制特性和输出特性
就目前的小信号模型来说
还有一些缺点
不支持 PWM 模式
或者说是移相的 LLC 工作模式
模型的准确度还有待进一步的提高
那么随着未来工作的进一步开展
我们会提供更好的
更加准确的工具和模型给大家
那么这个 topic
我们给大家提供了一个
LLC 小信号建模的思路
和 DC 不同工作点
不同的输入电压范围的一些分析
相应的一些补偿
控制的一些比较,针对 LLC 的3138数字控制器
那么TI提供了非常好的图形用户界面
可以非常方便的简单的对 LLC 的控制
控制环路的补偿
做处理
得到比较满意的闭环输出系统
TI 对于 LLC 的小信号模型
未来会进行更进一步的深入研究
提供更好的输出阻抗特性
更好的动态特性
增加对 PWM 调制方式
和移相 LLC 的控制方式支持
提供更好的工具和工作模式
给大家进一步提升
UCD3138 LLC 数字电源的特性指标
和相应的准确度
减少在实际产品设计过程当中
对 LLC 环路补偿的工作量和工作时间
-
 未学习 LLC 变换器小信号模型分析(上)
未学习 LLC 变换器小信号模型分析(上)
-
 未学习 LLC 变换器小信号模型分析(下)
未学习 LLC 变换器小信号模型分析(下)

 视频简介
视频简介
LLC 变换器小信号模型分析(下)
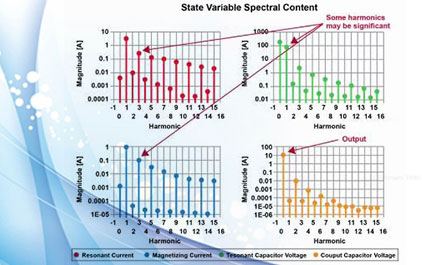
电源的控制环路建模对于有效优化电源稳定性要求,以及符合主要线路和负载瞬态性能标准是必不可少的。虽然这一点是显而易见的,而同样明显的是设计人员的工具箱中缺少针对LLC谐振转换器的实用小信号模型。由于对效率的要求越来越严格,这种重要设计过程工具的缺失会带来更加严重的后果。在某些情况下,电源的总体效率必须为96%,而同时又必须保持高功率因子和低总谐波失真。诸如此类的要求,对dc-dc级施加了很大的压力,需要提供的效率超过96%。由于能够实现这些高效率,谐振LLC转换器正在快速成为符合这些要求所选择的解决方案。不幸的是,由于缺少用户友好小信号模型,使得对这一拓扑的使用变得很困难。这一主题将为电源设计人员提供针对LLC转换器的小信号模型,以及一个能够在大范围运行条件下应用此模型的实用工具集。此外,这个建模工具为设计人员提供大量的时域集合,以及频谱分析输出,这些输出在帮助设计人员理解设计的终端性能特性方面十分有用。这个模型和相关工具是对电源设计人员工具箱的有力补充,从而可实现重大的设计辅助,以及对LLC转换器控制环路有更加深入的了解。

