TI 工业机器人技术概览 (1)
Loading the player...
将在30s后自动为您播放下一课程
大家下午好 欢迎大家来参加我们的工业研讨会 下面这一部分内容是关于工业机器人和工厂自动化的 主要是给大家介绍TI在这两方面都有哪些相关的方案 能够给大家带来一些参考 如果大家基于这些应用做一些设计的话 其实可以给大家带来非常多的一些好处 我想 提到工业自动化 大家可能首先就会想到 最近非常热门的工业4.0对吧 其实4.0我们是讲到第四代工业技术革命的情况 实际工业4.0主要专注的方向是 趋势是网络化的趋势 另外基于提高效率的应用的方向 当然就是说 分项控制也是它主要的核心部分 基于工业4.0我们在中国要做哪些事情呢 其实在今年5月 我们国家提出了made in China中国制造2025 其实这个也是围绕工业4.0怎么样在我国实现基于工业4.0的突破 其实在中国制造2025当中 主要的一些 关注的点 我们可以看到 一个是制造集成化 包括我们绿色制造的概念 还有就是对于传统制造业的话 进行结构化的一些改造 那么 这个是关于我们当前工业自动化的情况 我们TI的话在目前基于工业4.0 工业应用的话 我们有哪些focus的部分 我们会分布在这些领域当中 首先的话 一个可变控制器 大家知道 实际上在 工业现场的话 这是一个非常重要的组成部分 那么 接下来的话 作为执行机构 大家经常会提到 比如说 也是最近两年非常热门的工业机器人 对于工业机器人来说 实际它有很多部分构成 主要的执行机构 比如说我们有一些EV器 伺服驱动器 以及相关的一些跟自动化相关的模块 我们在所有的方面 都会有大大小小的一些方案可以给大家做一些参考 我们现在就一个工业机器人来看 我们具体来各个部分的应用情况 左边我们可以看到 是工业机器人的控制器 这个控制器 其实包含很多部分 比如说 我们一般会有一个人机界面 另外会有一个主控的板 当然还会有一个伺服控制的板 包括电源部分的一些电路 在以控制器为硬件基础的话 在这之上我们会有一些软件模块来支持界面的一些应用 对于机器人来说的话 实际它主要的核心部分它要动起来 对吧 我们说的motion的话 实际上大家可以看到 这些连接的部位的话 我们都是通过 最主要是通过伺服电机 当然是包括伺服电机控制会带有一定的传感器 编码器 在它的前端的话 会有一些扩展的轴 这上面一般有固定电机 还有包括像传感器 这些的一个部件 整个的话 这个前端实际是一个伺服系统 对于底座来说 可能主要是一些线缆还有一些变动器这些 装置 所以在这些部分 我们可能有精密变速的需求 所以大家可以看到 其实 另外的话 其实我们 工业的物联网现在也是非常热门的方向 这边的话其实包括无线互联 云服务器等等应用 都会是一个发展趋势 大家这里看到了 我们所有的各个部件 其实我们都有相关部件可以给到大家 作参考 所以非常丰富的应用 我们现在把刚才这个基于刚才工业机器人 我们看一下在工业机器人上面TI有哪些创新技术 其实大家知道 TI有非常丰富的产品系列 涵盖了 我们知道 在世界当中 有很多物理量 这些物理量我们需要进行采样 进行一些转换 我们所有的TI芯片都会涵盖转换 包括处理的一些应用当中 全部都会涵盖到 我们还是回到刚才的主题 关于运动控制 就是在工业机器人中最主要的一个部分 大家知道 对于一个工业机器人来说 实际上它是一个非常复杂的运动控制的一个过程 其实在这里面可能有多个伺服电机需要进行调试 大家知道 调试是非常耗时 麻烦的一个工作 而且对于这样一个机器人来说 它的工作状态 有非常多的方式 比如它经常要以非常快的速度运行 甚至超过2倍的运转速 但是它有的时候 需要以非常低的转速进行运行 当然就是说随着负载的一个变化 或者说本身惯量变化的要求 有的时候会超过8倍的惯量变化 对于这样一个复杂的系统的话 其实我们整个开发和调试 也是 相当复杂 我们现在的话 其实基于运动控制 我们的C2000系列中包含了Motion的算法 这个算法的话 从非常大的程度之上 能帮大家减少调试麻烦的程度 我们其实采用一种新型的叫(听不清)调节器替代PI传统的调节器 大家知道 我们的传统伺服里面 不管是 位置环度还是速度环度 应该都是用的PI调节器 对吧 在我们的motion中 其实它只用了一个(听不清)调节器 就可以完成对速度和位置环的控制 最大的好处就是(听不清)调节器只有一个带宽的参数需要调节 大家知道 如果PI的话 至少是两个参数 速度环路两个 再加上位置环路两个 至少四个参数要调 而且在不同速度和不同工况之下 这个参数调节 其实都是 有变化的 或者说我们需要不同组的参数 来适应不同的应用要求 所以我们认为非常的麻烦 我们曾经做过一个对比 这么复杂的系统 如果需要把所有的TI参数都整定好的话 可能需要 两到三天的时间 对比之下 用我们的motion的话 可能只需要10到20分钟的时间 就可以把整个参数整定完毕 这就是给大家带来的一个好处 就是控制方便 然后效率的一个提升 我们这边的话 实际上刚才也给大家讲了 我们的motion C2000里面INSTASPIN的MOTION最大的好处 如果用它来实现机器人的一个控制的话 一个就是 可以通过(听不清)motion的程序的话 来实现对于系统的惯量和摩擦系数的自动辨识 另外的话 我们辅助模块 可以通过(听不清)调节器 来实现单变量参数的调节 所以非常的方便 那么基于运动控制的话 其实除了基本的速度环路和位置环路 其实还有非常多关于速度和位置的运行要求 比如说 大家经常会看到 我需要在多点的速度段进行运行 我们就有相关的目录和plan相关的模块的话 大家通过配置一定的参数 就可以实现多点运行 而且每个点的速度 加速度 最关键是我们还可以对加加速度进行一些设置 这个就是我们motion主要的一个特点 那么 关于带有INSTASPIN算法的MCU我们现在主要是在C2000的系列当中 目前集成了 INSTASPIN FOC算法的话是我们的02X 03X和 02X 和06X系列 05X 06X系列 如果是motion的话 目前的话就是05X和06X两个系列当中 会固话motion之间的算法 所以有了INSTASPIN不管是FOC还是motion的话 我们就是针对现在大家在工业自动化领域当中经常用到的三相电机 不管是无刷电机 同步电机还是异步电机 我们其实可以基于INSTASPIN 在短时间让电机完成比较好的运行 我们这边说到我们可以在短短几分钟之内 如果大家拿到一台之前完全没有调试过的电机 但是基于INSTASPIN的话 在几分钟内就可以把电机转起来 这个的话 实际就是INSTASPIN最大的一个优势 实际上 INSTASPIN现在已经在很多工业领域当中 得到了非常广泛的应用 大家如果将来对于这个 这边提一下 FOC是基于无传感器的矢量控制 motion的话主要是基于有位置的控制 包括伺服的一些应用 关于motion的话 我们这边主要强调一下 它的一个特点 刚才其实也陆陆续续讲了 主要就是说 它是单(听不清)就可以完成位置环和速度环的调节 而且我们可以稳定地保持在0位置 就是大家在伺服里面经常看到的话 我需要它稳定地停在某一个位置上面 在两个位置之间运行的话 我们可以控制它的加加速度 这个也是motion应用的一个优势 另外的话 在不同位置之间的切换的话 也就会非常方便 所以 通过motion来实现伺服的一个设计的话 是非常方便和快速的 这边还有找到了 大家如果是在机器人领域里面也好 经常会碰到的 刚才我们也看到了 工业机器人当中 他可能会有多个电机 多个电机的话 我们现在C2000 06XM系列 就可以实现 单芯片双电机 基于磨损的控制 我们这边的话 大概是90个mix的0落差 基本上50个mix可以做电梯控制 然后40个mix加协处理器可以做一些 应用层一些代码的设计 两个电极之间的协同控制的话我们可以通过plan模块来实现 这个部分的话 如果大家关注多轴的话 我们现在在最新的INSTASPIN这个参考样例的程序集 Motor Wear 里面的话 已经有相关的硬件资料可以提供给大家 关于双电机软件代码框架可能会到下一版Motor Wear会 大家可以看到参考的样例程序 提到电机的话 不得不说的是在伺服方面 其实它的传感器也是非常重要的方面 其实在伺服领域 我们需要提供它的位置 我们这边特别给大家提到的是我们刚刚 才发布的一个 叫position encoder manager的一个算法 我们有特定的芯片来支持这样一个算法 我们这边来看一下 其实在伺服里面的话 大家要做精确的位置控制 肯定会有一些相关的速度或者位置传感器 常用的话 是增量式的编码器 当然增量式的编码器得到的是相对位置 而且成本会比较低 通过C2000的QEP的话 直接就可以计算它的速度 如果需要精度比较高 需要得到绝对位置的话 可能需要采用绝对位置的编码器 绝对编码器的话实际上现在有多种协议支持 包括常用的有 indata (听不清)等等这样的一些协议 还有一种我们可以获得电机速度或者位置的一个传感器 我们也会经常用到 就是悬变 悬变输出的是sin 和sin的角度 所以我们需要特定的算法或者相关的一些专门的芯片来做解码 我可以简单提供我们需要的角度值 实际上大家看到 不管采用什么样的传感器来检测速度 其实都需要做一定的计算和转换 就是基于这样一个考虑 特别是在伺服里面 其实大家现在越来越多考虑用绝对式的编码器 所以我们会集成了position encoder manager 这个实际上通过C2000芯片中的一些外设 大家可以看到这边罗列的一些外设 我们来实现对于绝对式编码器 解码的一个算法 我们目前支持的协议包括indata hyper data等等 这样一些绝对式编码器都可以 来实现解码 目前 支持这些解码的 带有position encoder manager 的 芯片有37XD S 07X以及我们明年会推出的004X系列 都会包含position encoder manager 大家如果关注关于解码的一些应用的话 可以去更新我们C2000的资料集 叫(听不清) 如果大家有安装的话 可以更新一下 把它更新到最新的3.3.7版本 应该是上周刚刚 position manager的话 已经发布在最新的版本里面 大家可以去看一下 那么关于伺服和相关的速度的一些传感器的解码的一些评估板 大家这里 可以看到 我们有非常多的支持 这些都是基于C2000的 这边的话 实际上我们有工业驱动的套件 还有包括我们(听不清)以及旋变的解码的套件 这个悬变解码是通过我们的C2000 比如说28035 28335 通过软件来实现的 大家可以基于这个评估板 因为这个上面带有激励 可以把它和(听不清)相连 然后可以对它的角度进行结算 做一个评估 position manager的话大家如果要评估的话 就需要通过377D的评估板来实现 刚才讲到的其实是我们的绝对式编码器 包括悬变的解码 悬变的解码的话 其实我们有几种方式 一种通过软件的方式来实现 刚刚给大家讲到 我们C2000可以来解码 另外的话 TI也有悬变解码的芯片 专用的芯片 目前的话 是拼接421 之前的话 BGA411大家也可以在网上查到相关资料 其实411和421 最主要的是411里面带有一个(听不清) 而421里面是没有的 但421已经集成了包括放大器电源这样的功能 最主要的就是说 我们的421有支持62508的安全的特性 所以 如果说 大家用悬变的话 可以通过我们的PGA421实现解码控制 我们的421带来的最大的好处就是说 我们的集成度非常高 另外设计起来非常方便 还有我们是有安全特性 这个我想在工业应用中也是非常重要的一个趋势 就是关于安全性的一个要求 我们来看一下 如果常规的我们一个就是说 关于悬变解码的话 可能通过一个专门的解码芯片来实现 这边的话 外面还要加一些保护 还要包括一些(听不清) 如果通过普通MCU的话 可能需要通过高速ADC的端口实现 基于我们的PGA421的话 大家可以看到 外围电路非常简单 所以在成本和体积上有非常大的优势 所以这个是关于PGA421的 刚才其实讲到的是关于我们的 位置和速度的一个检测 在电机驱动上面的话 其实我们除了说 我们有专门的驱动芯片的话 可以给大家做一些 选择 我们有非常丰富的驱动芯片 比如说这边大家看到 我们有ERV8系列 和DRV10系列 这个都是大家可以通过不同的电机种类 找到对应的一些 驱动的芯片 比如说我们有固定电机的 还有有刷的 还有无刷的 这些都有 另外的话 其实我们还有DRV5系列 这个实际上是我们的霍尔传感器 所以大家有霍尔应用的话 TI也有专门的霍尔芯片给到大家可以来用 所有这些马达驱动芯片 主要分成两大类 一种是集成驱动 也就是除了(听不清)之外 我们会把后面的桥路 比如说mos的话 我们会把它包含在芯片当中 比如说像我们的DRV8312 DRV8412这些的话 除了有驱动部分 另外里面还有桥路 这样的话 整体的集成度就比较高 但是相对来说 电流相对比较小一些 还有一种是专门的门机驱动 我们叫他预驱 这样的话它其实不包含桥路的 大家如果用的话 外部需要专门加mos搭成的桥路 这个的话 实际上就是说 如果大家有电流比较高的要求的话 就可以通过选择不同的mos来实现 这个的话就是大家经常看到的 DRV8301 包括现在的DRV8305 这个系列都是出于预驱的一个马达驱动芯片 这个是关于这个电机控制
大家下午好 欢迎大家来参加我们的工业研讨会 下面这一部分内容是关于工业机器人和工厂自动化的 主要是给大家介绍TI在这两方面都有哪些相关的方案 能够给大家带来一些参考 如果大家基于这些应用做一些设计的话 其实可以给大家带来非常多的一些好处 我想 提到工业自动化 大家可能首先就会想到 最近非常热门的工业4.0对吧 其实4.0我们是讲到第四代工业技术革命的情况 实际工业4.0主要专注的方向是 趋势是网络化的趋势 另外基于提高效率的应用的方向 当然就是说 分项控制也是它主要的核心部分 基于工业4.0我们在中国要做哪些事情呢 其实在今年5月 我们国家提出了made in China中国制造2025 其实这个也是围绕工业4.0怎么样在我国实现基于工业4.0的突破 其实在中国制造2025当中 主要的一些 关注的点 我们可以看到 一个是制造集成化 包括我们绿色制造的概念 还有就是对于传统制造业的话 进行结构化的一些改造 那么 这个是关于我们当前工业自动化的情况 我们TI的话在目前基于工业4.0 工业应用的话 我们有哪些focus的部分 我们会分布在这些领域当中 首先的话 一个可变控制器 大家知道 实际上在 工业现场的话 这是一个非常重要的组成部分 那么 接下来的话 作为执行机构 大家经常会提到 比如说 也是最近两年非常热门的工业机器人 对于工业机器人来说 实际它有很多部分构成 主要的执行机构 比如说我们有一些EV器 伺服驱动器 以及相关的一些跟自动化相关的模块 我们在所有的方面 都会有大大小小的一些方案可以给大家做一些参考 我们现在就一个工业机器人来看 我们具体来各个部分的应用情况 左边我们可以看到 是工业机器人的控制器 这个控制器 其实包含很多部分 比如说 我们一般会有一个人机界面 另外会有一个主控的板 当然还会有一个伺服控制的板 包括电源部分的一些电路 在以控制器为硬件基础的话 在这之上我们会有一些软件模块来支持界面的一些应用 对于机器人来说的话 实际它主要的核心部分它要动起来 对吧 我们说的motion的话 实际上大家可以看到 这些连接的部位的话 我们都是通过 最主要是通过伺服电机 当然是包括伺服电机控制会带有一定的传感器 编码器 在它的前端的话 会有一些扩展的轴 这上面一般有固定电机 还有包括像传感器 这些的一个部件 整个的话 这个前端实际是一个伺服系统 对于底座来说 可能主要是一些线缆还有一些变动器这些 装置 所以在这些部分 我们可能有精密变速的需求 所以大家可以看到 其实 另外的话 其实我们 工业的物联网现在也是非常热门的方向 这边的话其实包括无线互联 云服务器等等应用 都会是一个发展趋势 大家这里看到了 我们所有的各个部件 其实我们都有相关部件可以给到大家 作参考 所以非常丰富的应用 我们现在把刚才这个基于刚才工业机器人 我们看一下在工业机器人上面TI有哪些创新技术 其实大家知道 TI有非常丰富的产品系列 涵盖了 我们知道 在世界当中 有很多物理量 这些物理量我们需要进行采样 进行一些转换 我们所有的TI芯片都会涵盖转换 包括处理的一些应用当中 全部都会涵盖到 我们还是回到刚才的主题 关于运动控制 就是在工业机器人中最主要的一个部分 大家知道 对于一个工业机器人来说 实际上它是一个非常复杂的运动控制的一个过程 其实在这里面可能有多个伺服电机需要进行调试 大家知道 调试是非常耗时 麻烦的一个工作 而且对于这样一个机器人来说 它的工作状态 有非常多的方式 比如它经常要以非常快的速度运行 甚至超过2倍的运转速 但是它有的时候 需要以非常低的转速进行运行 当然就是说随着负载的一个变化 或者说本身惯量变化的要求 有的时候会超过8倍的惯量变化 对于这样一个复杂的系统的话 其实我们整个开发和调试 也是 相当复杂 我们现在的话 其实基于运动控制 我们的C2000系列中包含了Motion的算法 这个算法的话 从非常大的程度之上 能帮大家减少调试麻烦的程度 我们其实采用一种新型的叫(听不清)调节器替代PI传统的调节器 大家知道 我们的传统伺服里面 不管是 位置环度还是速度环度 应该都是用的PI调节器 对吧 在我们的motion中 其实它只用了一个(听不清)调节器 就可以完成对速度和位置环的控制 最大的好处就是(听不清)调节器只有一个带宽的参数需要调节 大家知道 如果PI的话 至少是两个参数 速度环路两个 再加上位置环路两个 至少四个参数要调 而且在不同速度和不同工况之下 这个参数调节 其实都是 有变化的 或者说我们需要不同组的参数 来适应不同的应用要求 所以我们认为非常的麻烦 我们曾经做过一个对比 这么复杂的系统 如果需要把所有的TI参数都整定好的话 可能需要 两到三天的时间 对比之下 用我们的motion的话 可能只需要10到20分钟的时间 就可以把整个参数整定完毕 这就是给大家带来的一个好处 就是控制方便 然后效率的一个提升 我们这边的话 实际上刚才也给大家讲了 我们的motion C2000里面INSTASPIN的MOTION最大的好处 如果用它来实现机器人的一个控制的话 一个就是 可以通过(听不清)motion的程序的话 来实现对于系统的惯量和摩擦系数的自动辨识 另外的话 我们辅助模块 可以通过(听不清)调节器 来实现单变量参数的调节 所以非常的方便 那么基于运动控制的话 其实除了基本的速度环路和位置环路 其实还有非常多关于速度和位置的运行要求 比如说 大家经常会看到 我需要在多点的速度段进行运行 我们就有相关的目录和plan相关的模块的话 大家通过配置一定的参数 就可以实现多点运行 而且每个点的速度 加速度 最关键是我们还可以对加加速度进行一些设置 这个就是我们motion主要的一个特点 那么 关于带有INSTASPIN算法的MCU我们现在主要是在C2000的系列当中 目前集成了 INSTASPIN FOC算法的话是我们的02X 03X和 02X 和06X系列 05X 06X系列 如果是motion的话 目前的话就是05X和06X两个系列当中 会固话motion之间的算法 所以有了INSTASPIN不管是FOC还是motion的话 我们就是针对现在大家在工业自动化领域当中经常用到的三相电机 不管是无刷电机 同步电机还是异步电机 我们其实可以基于INSTASPIN 在短时间让电机完成比较好的运行 我们这边说到我们可以在短短几分钟之内 如果大家拿到一台之前完全没有调试过的电机 但是基于INSTASPIN的话 在几分钟内就可以把电机转起来 这个的话 实际就是INSTASPIN最大的一个优势 实际上 INSTASPIN现在已经在很多工业领域当中 得到了非常广泛的应用 大家如果将来对于这个 这边提一下 FOC是基于无传感器的矢量控制 motion的话主要是基于有位置的控制 包括伺服的一些应用 关于motion的话 我们这边主要强调一下 它的一个特点 刚才其实也陆陆续续讲了 主要就是说 它是单(听不清)就可以完成位置环和速度环的调节 而且我们可以稳定地保持在0位置 就是大家在伺服里面经常看到的话 我需要它稳定地停在某一个位置上面 在两个位置之间运行的话 我们可以控制它的加加速度 这个也是motion应用的一个优势 另外的话 在不同位置之间的切换的话 也就会非常方便 所以 通过motion来实现伺服的一个设计的话 是非常方便和快速的 这边还有找到了 大家如果是在机器人领域里面也好 经常会碰到的 刚才我们也看到了 工业机器人当中 他可能会有多个电机 多个电机的话 我们现在C2000 06XM系列 就可以实现 单芯片双电机 基于磨损的控制 我们这边的话 大概是90个mix的0落差 基本上50个mix可以做电梯控制 然后40个mix加协处理器可以做一些 应用层一些代码的设计 两个电极之间的协同控制的话我们可以通过plan模块来实现 这个部分的话 如果大家关注多轴的话 我们现在在最新的INSTASPIN这个参考样例的程序集 Motor Wear 里面的话 已经有相关的硬件资料可以提供给大家 关于双电机软件代码框架可能会到下一版Motor Wear会 大家可以看到参考的样例程序 提到电机的话 不得不说的是在伺服方面 其实它的传感器也是非常重要的方面 其实在伺服领域 我们需要提供它的位置 我们这边特别给大家提到的是我们刚刚 才发布的一个 叫position encoder manager的一个算法 我们有特定的芯片来支持这样一个算法 我们这边来看一下 其实在伺服里面的话 大家要做精确的位置控制 肯定会有一些相关的速度或者位置传感器 常用的话 是增量式的编码器 当然增量式的编码器得到的是相对位置 而且成本会比较低 通过C2000的QEP的话 直接就可以计算它的速度 如果需要精度比较高 需要得到绝对位置的话 可能需要采用绝对位置的编码器 绝对编码器的话实际上现在有多种协议支持 包括常用的有 indata (听不清)等等这样的一些协议 还有一种我们可以获得电机速度或者位置的一个传感器 我们也会经常用到 就是悬变 悬变输出的是sin 和sin的角度 所以我们需要特定的算法或者相关的一些专门的芯片来做解码 我可以简单提供我们需要的角度值 实际上大家看到 不管采用什么样的传感器来检测速度 其实都需要做一定的计算和转换 就是基于这样一个考虑 特别是在伺服里面 其实大家现在越来越多考虑用绝对式的编码器 所以我们会集成了position encoder manager 这个实际上通过C2000芯片中的一些外设 大家可以看到这边罗列的一些外设 我们来实现对于绝对式编码器 解码的一个算法 我们目前支持的协议包括indata hyper data等等 这样一些绝对式编码器都可以 来实现解码 目前 支持这些解码的 带有position encoder manager 的 芯片有37XD S 07X以及我们明年会推出的004X系列 都会包含position encoder manager 大家如果关注关于解码的一些应用的话 可以去更新我们C2000的资料集 叫(听不清) 如果大家有安装的话 可以更新一下 把它更新到最新的3.3.7版本 应该是上周刚刚 position manager的话 已经发布在最新的版本里面 大家可以去看一下 那么关于伺服和相关的速度的一些传感器的解码的一些评估板 大家这里 可以看到 我们有非常多的支持 这些都是基于C2000的 这边的话 实际上我们有工业驱动的套件 还有包括我们(听不清)以及旋变的解码的套件 这个悬变解码是通过我们的C2000 比如说28035 28335 通过软件来实现的 大家可以基于这个评估板 因为这个上面带有激励 可以把它和(听不清)相连 然后可以对它的角度进行结算 做一个评估 position manager的话大家如果要评估的话 就需要通过377D的评估板来实现 刚才讲到的其实是我们的绝对式编码器 包括悬变的解码 悬变的解码的话 其实我们有几种方式 一种通过软件的方式来实现 刚刚给大家讲到 我们C2000可以来解码 另外的话 TI也有悬变解码的芯片 专用的芯片 目前的话 是拼接421 之前的话 BGA411大家也可以在网上查到相关资料 其实411和421 最主要的是411里面带有一个(听不清) 而421里面是没有的 但421已经集成了包括放大器电源这样的功能 最主要的就是说 我们的421有支持62508的安全的特性 所以 如果说 大家用悬变的话 可以通过我们的PGA421实现解码控制 我们的421带来的最大的好处就是说 我们的集成度非常高 另外设计起来非常方便 还有我们是有安全特性 这个我想在工业应用中也是非常重要的一个趋势 就是关于安全性的一个要求 我们来看一下 如果常规的我们一个就是说 关于悬变解码的话 可能通过一个专门的解码芯片来实现 这边的话 外面还要加一些保护 还要包括一些(听不清) 如果通过普通MCU的话 可能需要通过高速ADC的端口实现 基于我们的PGA421的话 大家可以看到 外围电路非常简单 所以在成本和体积上有非常大的优势 所以这个是关于PGA421的 刚才其实讲到的是关于我们的 位置和速度的一个检测 在电机驱动上面的话 其实我们除了说 我们有专门的驱动芯片的话 可以给大家做一些 选择 我们有非常丰富的驱动芯片 比如说这边大家看到 我们有ERV8系列 和DRV10系列 这个都是大家可以通过不同的电机种类 找到对应的一些 驱动的芯片 比如说我们有固定电机的 还有有刷的 还有无刷的 这些都有 另外的话 其实我们还有DRV5系列 这个实际上是我们的霍尔传感器 所以大家有霍尔应用的话 TI也有专门的霍尔芯片给到大家可以来用 所有这些马达驱动芯片 主要分成两大类 一种是集成驱动 也就是除了(听不清)之外 我们会把后面的桥路 比如说mos的话 我们会把它包含在芯片当中 比如说像我们的DRV8312 DRV8412这些的话 除了有驱动部分 另外里面还有桥路 这样的话 整体的集成度就比较高 但是相对来说 电流相对比较小一些 还有一种是专门的门机驱动 我们叫他预驱 这样的话它其实不包含桥路的 大家如果用的话 外部需要专门加mos搭成的桥路 这个的话 实际上就是说 如果大家有电流比较高的要求的话 就可以通过选择不同的mos来实现 这个的话就是大家经常看到的 DRV8301 包括现在的DRV8305 这个系列都是出于预驱的一个马达驱动芯片 这个是关于这个电机控制
大家下午好 欢迎大家来参加我们的工业研讨会
下面这一部分内容是关于工业机器人和工厂自动化的
主要是给大家介绍TI在这两方面都有哪些相关的方案 能够给大家带来一些参考
如果大家基于这些应用做一些设计的话
其实可以给大家带来非常多的一些好处
我想 提到工业自动化 大家可能首先就会想到
最近非常热门的工业4.0对吧
其实4.0我们是讲到第四代工业技术革命的情况
实际工业4.0主要专注的方向是
趋势是网络化的趋势
另外基于提高效率的应用的方向
当然就是说 分项控制也是它主要的核心部分
基于工业4.0我们在中国要做哪些事情呢 其实在今年5月
我们国家提出了made in China中国制造2025
其实这个也是围绕工业4.0怎么样在我国实现基于工业4.0的突破
其实在中国制造2025当中 主要的一些
关注的点 我们可以看到 一个是制造集成化
包括我们绿色制造的概念
还有就是对于传统制造业的话 进行结构化的一些改造
那么 这个是关于我们当前工业自动化的情况
我们TI的话在目前基于工业4.0 工业应用的话 我们有哪些focus的部分
我们会分布在这些领域当中
首先的话 一个可变控制器 大家知道 实际上在
工业现场的话 这是一个非常重要的组成部分
那么 接下来的话 作为执行机构 大家经常会提到
比如说 也是最近两年非常热门的工业机器人
对于工业机器人来说 实际它有很多部分构成
主要的执行机构 比如说我们有一些EV器
伺服驱动器 以及相关的一些跟自动化相关的模块
我们在所有的方面 都会有大大小小的一些方案可以给大家做一些参考
我们现在就一个工业机器人来看 我们具体来各个部分的应用情况
左边我们可以看到 是工业机器人的控制器
这个控制器 其实包含很多部分
比如说 我们一般会有一个人机界面
另外会有一个主控的板
当然还会有一个伺服控制的板
包括电源部分的一些电路
在以控制器为硬件基础的话
在这之上我们会有一些软件模块来支持界面的一些应用
对于机器人来说的话 实际它主要的核心部分它要动起来
对吧 我们说的motion的话 实际上大家可以看到 这些连接的部位的话 我们都是通过
最主要是通过伺服电机 当然是包括伺服电机控制会带有一定的传感器
编码器 在它的前端的话
会有一些扩展的轴 这上面一般有固定电机
还有包括像传感器 这些的一个部件
整个的话 这个前端实际是一个伺服系统
对于底座来说 可能主要是一些线缆还有一些变动器这些
装置 所以在这些部分
我们可能有精密变速的需求
所以大家可以看到 其实 另外的话 其实我们
工业的物联网现在也是非常热门的方向
这边的话其实包括无线互联 云服务器等等应用
都会是一个发展趋势 大家这里看到了
我们所有的各个部件 其实我们都有相关部件可以给到大家
作参考 所以非常丰富的应用
我们现在把刚才这个基于刚才工业机器人
我们看一下在工业机器人上面TI有哪些创新技术
其实大家知道 TI有非常丰富的产品系列
涵盖了 我们知道 在世界当中 有很多物理量
这些物理量我们需要进行采样
进行一些转换
我们所有的TI芯片都会涵盖转换 包括处理的一些应用当中
全部都会涵盖到
我们还是回到刚才的主题 关于运动控制
就是在工业机器人中最主要的一个部分
大家知道 对于一个工业机器人来说
实际上它是一个非常复杂的运动控制的一个过程
其实在这里面可能有多个伺服电机需要进行调试
大家知道 调试是非常耗时 麻烦的一个工作
而且对于这样一个机器人来说 它的工作状态
有非常多的方式 比如它经常要以非常快的速度运行
甚至超过2倍的运转速
但是它有的时候 需要以非常低的转速进行运行
当然就是说随着负载的一个变化 或者说本身惯量变化的要求
有的时候会超过8倍的惯量变化
对于这样一个复杂的系统的话 其实我们整个开发和调试 也是
相当复杂 我们现在的话 其实基于运动控制
我们的C2000系列中包含了Motion的算法
这个算法的话 从非常大的程度之上 能帮大家减少调试麻烦的程度
我们其实采用一种新型的叫(听不清)调节器替代PI传统的调节器
大家知道 我们的传统伺服里面 不管是
位置环度还是速度环度 应该都是用的PI调节器 对吧
在我们的motion中 其实它只用了一个(听不清)调节器
就可以完成对速度和位置环的控制
最大的好处就是(听不清)调节器只有一个带宽的参数需要调节
大家知道 如果PI的话 至少是两个参数
速度环路两个 再加上位置环路两个
至少四个参数要调
而且在不同速度和不同工况之下 这个参数调节 其实都是
有变化的 或者说我们需要不同组的参数
来适应不同的应用要求
所以我们认为非常的麻烦
我们曾经做过一个对比 这么复杂的系统 如果需要把所有的TI参数都整定好的话 可能需要
两到三天的时间
对比之下 用我们的motion的话 可能只需要10到20分钟的时间
就可以把整个参数整定完毕
这就是给大家带来的一个好处 就是控制方便 然后效率的一个提升
我们这边的话 实际上刚才也给大家讲了 我们的motion
C2000里面INSTASPIN的MOTION最大的好处
如果用它来实现机器人的一个控制的话
一个就是 可以通过(听不清)motion的程序的话
来实现对于系统的惯量和摩擦系数的自动辨识
另外的话 我们辅助模块 可以通过(听不清)调节器
来实现单变量参数的调节
所以非常的方便 那么基于运动控制的话
其实除了基本的速度环路和位置环路
其实还有非常多关于速度和位置的运行要求 比如说
大家经常会看到 我需要在多点的速度段进行运行
我们就有相关的目录和plan相关的模块的话
大家通过配置一定的参数
就可以实现多点运行
而且每个点的速度 加速度 最关键是我们还可以对加加速度进行一些设置
这个就是我们motion主要的一个特点
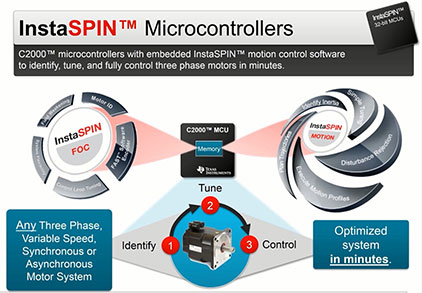
那么 关于带有INSTASPIN算法的MCU我们现在主要是在C2000的系列当中
目前集成了 INSTASPIN FOC算法的话是我们的02X 03X和
02X 和06X系列 05X 06X系列
如果是motion的话 目前的话就是05X和06X两个系列当中
会固话motion之间的算法
所以有了INSTASPIN不管是FOC还是motion的话
我们就是针对现在大家在工业自动化领域当中经常用到的三相电机
不管是无刷电机 同步电机还是异步电机
我们其实可以基于INSTASPIN 在短时间让电机完成比较好的运行
我们这边说到我们可以在短短几分钟之内
如果大家拿到一台之前完全没有调试过的电机
但是基于INSTASPIN的话 在几分钟内就可以把电机转起来
这个的话 实际就是INSTASPIN最大的一个优势
实际上 INSTASPIN现在已经在很多工业领域当中
得到了非常广泛的应用 大家如果将来对于这个
这边提一下 FOC是基于无传感器的矢量控制
motion的话主要是基于有位置的控制
包括伺服的一些应用
关于motion的话 我们这边主要强调一下 它的一个特点 刚才其实也陆陆续续讲了
主要就是说 它是单(听不清)就可以完成位置环和速度环的调节
而且我们可以稳定地保持在0位置
就是大家在伺服里面经常看到的话 我需要它稳定地停在某一个位置上面
在两个位置之间运行的话 我们可以控制它的加加速度
这个也是motion应用的一个优势
另外的话 在不同位置之间的切换的话 也就会非常方便
所以 通过motion来实现伺服的一个设计的话
是非常方便和快速的
这边还有找到了 大家如果是在机器人领域里面也好
经常会碰到的 刚才我们也看到了 工业机器人当中
他可能会有多个电机
多个电机的话 我们现在C2000 06XM系列
就可以实现 单芯片双电机 基于磨损的控制
我们这边的话 大概是90个mix的0落差
基本上50个mix可以做电梯控制 然后40个mix加协处理器可以做一些
应用层一些代码的设计
两个电极之间的协同控制的话我们可以通过plan模块来实现
这个部分的话 如果大家关注多轴的话
我们现在在最新的INSTASPIN这个参考样例的程序集
Motor Wear 里面的话 已经有相关的硬件资料可以提供给大家
关于双电机软件代码框架可能会到下一版Motor Wear会
大家可以看到参考的样例程序
提到电机的话 不得不说的是在伺服方面
其实它的传感器也是非常重要的方面 其实在伺服领域
我们需要提供它的位置 我们这边特别给大家提到的是我们刚刚
才发布的一个 叫position encoder manager的一个算法
我们有特定的芯片来支持这样一个算法
我们这边来看一下 其实在伺服里面的话
大家要做精确的位置控制 肯定会有一些相关的速度或者位置传感器
常用的话 是增量式的编码器
当然增量式的编码器得到的是相对位置
而且成本会比较低
通过C2000的QEP的话 直接就可以计算它的速度
如果需要精度比较高 需要得到绝对位置的话 可能需要采用绝对位置的编码器
绝对编码器的话实际上现在有多种协议支持 包括常用的有 indata
(听不清)等等这样的一些协议
还有一种我们可以获得电机速度或者位置的一个传感器
我们也会经常用到 就是悬变
悬变输出的是sin 和sin的角度
所以我们需要特定的算法或者相关的一些专门的芯片来做解码
我可以简单提供我们需要的角度值
实际上大家看到 不管采用什么样的传感器来检测速度
其实都需要做一定的计算和转换
就是基于这样一个考虑 特别是在伺服里面
其实大家现在越来越多考虑用绝对式的编码器
所以我们会集成了position encoder manager
这个实际上通过C2000芯片中的一些外设
大家可以看到这边罗列的一些外设 我们来实现对于绝对式编码器
解码的一个算法
我们目前支持的协议包括indata hyper data等等 这样一些绝对式编码器都可以
来实现解码 目前 支持这些解码的 带有position encoder manager 的
芯片有37XD S 07X以及我们明年会推出的004X系列
都会包含position encoder manager
大家如果关注关于解码的一些应用的话
可以去更新我们C2000的资料集 叫(听不清)
如果大家有安装的话 可以更新一下
把它更新到最新的3.3.7版本
应该是上周刚刚 position manager的话 已经发布在最新的版本里面
大家可以去看一下
那么关于伺服和相关的速度的一些传感器的解码的一些评估板 大家这里
可以看到 我们有非常多的支持
这些都是基于C2000的
这边的话 实际上我们有工业驱动的套件
还有包括我们(听不清)以及旋变的解码的套件
这个悬变解码是通过我们的C2000
比如说28035 28335 通过软件来实现的
大家可以基于这个评估板 因为这个上面带有激励
可以把它和(听不清)相连 然后可以对它的角度进行结算 做一个评估
position manager的话大家如果要评估的话 就需要通过377D的评估板来实现
刚才讲到的其实是我们的绝对式编码器
包括悬变的解码
悬变的解码的话 其实我们有几种方式 一种通过软件的方式来实现
刚刚给大家讲到 我们C2000可以来解码
另外的话 TI也有悬变解码的芯片
专用的芯片 目前的话 是拼接421
之前的话 BGA411大家也可以在网上查到相关资料
其实411和421 最主要的是411里面带有一个(听不清)
而421里面是没有的 但421已经集成了包括放大器电源这样的功能
最主要的就是说 我们的421有支持62508的安全的特性
所以 如果说 大家用悬变的话 可以通过我们的PGA421实现解码控制
我们的421带来的最大的好处就是说
我们的集成度非常高 另外设计起来非常方便
还有我们是有安全特性
这个我想在工业应用中也是非常重要的一个趋势
就是关于安全性的一个要求
我们来看一下 如果常规的我们一个就是说
关于悬变解码的话 可能通过一个专门的解码芯片来实现
这边的话 外面还要加一些保护 还要包括一些(听不清)
如果通过普通MCU的话 可能需要通过高速ADC的端口实现
基于我们的PGA421的话 大家可以看到
外围电路非常简单
所以在成本和体积上有非常大的优势
所以这个是关于PGA421的
刚才其实讲到的是关于我们的
位置和速度的一个检测 在电机驱动上面的话 其实我们除了说
我们有专门的驱动芯片的话 可以给大家做一些
选择 我们有非常丰富的驱动芯片 比如说这边大家看到 我们有ERV8系列
和DRV10系列
这个都是大家可以通过不同的电机种类 找到对应的一些
驱动的芯片 比如说我们有固定电机的
还有有刷的 还有无刷的
这些都有 另外的话 其实我们还有DRV5系列
这个实际上是我们的霍尔传感器
所以大家有霍尔应用的话 TI也有专门的霍尔芯片给到大家可以来用
所有这些马达驱动芯片
主要分成两大类 一种是集成驱动 也就是除了(听不清)之外
我们会把后面的桥路 比如说mos的话 我们会把它包含在芯片当中
比如说像我们的DRV8312
DRV8412这些的话 除了有驱动部分 另外里面还有桥路
这样的话 整体的集成度就比较高
但是相对来说 电流相对比较小一些
还有一种是专门的门机驱动
我们叫他预驱
这样的话它其实不包含桥路的 大家如果用的话
外部需要专门加mos搭成的桥路
这个的话 实际上就是说 如果大家有电流比较高的要求的话
就可以通过选择不同的mos来实现
这个的话就是大家经常看到的 DRV8301 包括现在的DRV8305
这个系列都是出于预驱的一个马达驱动芯片
这个是关于这个电机控制
大家下午好 欢迎大家来参加我们的工业研讨会 下面这一部分内容是关于工业机器人和工厂自动化的 主要是给大家介绍TI在这两方面都有哪些相关的方案 能够给大家带来一些参考 如果大家基于这些应用做一些设计的话 其实可以给大家带来非常多的一些好处 我想 提到工业自动化 大家可能首先就会想到 最近非常热门的工业4.0对吧 其实4.0我们是讲到第四代工业技术革命的情况 实际工业4.0主要专注的方向是 趋势是网络化的趋势 另外基于提高效率的应用的方向 当然就是说 分项控制也是它主要的核心部分 基于工业4.0我们在中国要做哪些事情呢 其实在今年5月 我们国家提出了made in China中国制造2025 其实这个也是围绕工业4.0怎么样在我国实现基于工业4.0的突破 其实在中国制造2025当中 主要的一些 关注的点 我们可以看到 一个是制造集成化 包括我们绿色制造的概念 还有就是对于传统制造业的话 进行结构化的一些改造 那么 这个是关于我们当前工业自动化的情况 我们TI的话在目前基于工业4.0 工业应用的话 我们有哪些focus的部分 我们会分布在这些领域当中 首先的话 一个可变控制器 大家知道 实际上在 工业现场的话 这是一个非常重要的组成部分 那么 接下来的话 作为执行机构 大家经常会提到 比如说 也是最近两年非常热门的工业机器人 对于工业机器人来说 实际它有很多部分构成 主要的执行机构 比如说我们有一些EV器 伺服驱动器 以及相关的一些跟自动化相关的模块 我们在所有的方面 都会有大大小小的一些方案可以给大家做一些参考 我们现在就一个工业机器人来看 我们具体来各个部分的应用情况 左边我们可以看到 是工业机器人的控制器 这个控制器 其实包含很多部分 比如说 我们一般会有一个人机界面 另外会有一个主控的板 当然还会有一个伺服控制的板 包括电源部分的一些电路 在以控制器为硬件基础的话 在这之上我们会有一些软件模块来支持界面的一些应用 对于机器人来说的话 实际它主要的核心部分它要动起来 对吧 我们说的motion的话 实际上大家可以看到 这些连接的部位的话 我们都是通过 最主要是通过伺服电机 当然是包括伺服电机控制会带有一定的传感器 编码器 在它的前端的话 会有一些扩展的轴 这上面一般有固定电机 还有包括像传感器 这些的一个部件 整个的话 这个前端实际是一个伺服系统 对于底座来说 可能主要是一些线缆还有一些变动器这些 装置 所以在这些部分 我们可能有精密变速的需求 所以大家可以看到 其实 另外的话 其实我们 工业的物联网现在也是非常热门的方向 这边的话其实包括无线互联 云服务器等等应用 都会是一个发展趋势 大家这里看到了 我们所有的各个部件 其实我们都有相关部件可以给到大家 作参考 所以非常丰富的应用 我们现在把刚才这个基于刚才工业机器人 我们看一下在工业机器人上面TI有哪些创新技术 其实大家知道 TI有非常丰富的产品系列 涵盖了 我们知道 在世界当中 有很多物理量 这些物理量我们需要进行采样 进行一些转换 我们所有的TI芯片都会涵盖转换 包括处理的一些应用当中 全部都会涵盖到 我们还是回到刚才的主题 关于运动控制 就是在工业机器人中最主要的一个部分 大家知道 对于一个工业机器人来说 实际上它是一个非常复杂的运动控制的一个过程 其实在这里面可能有多个伺服电机需要进行调试 大家知道 调试是非常耗时 麻烦的一个工作 而且对于这样一个机器人来说 它的工作状态 有非常多的方式 比如它经常要以非常快的速度运行 甚至超过2倍的运转速 但是它有的时候 需要以非常低的转速进行运行 当然就是说随着负载的一个变化 或者说本身惯量变化的要求 有的时候会超过8倍的惯量变化 对于这样一个复杂的系统的话 其实我们整个开发和调试 也是 相当复杂 我们现在的话 其实基于运动控制 我们的C2000系列中包含了Motion的算法 这个算法的话 从非常大的程度之上 能帮大家减少调试麻烦的程度 我们其实采用一种新型的叫(听不清)调节器替代PI传统的调节器 大家知道 我们的传统伺服里面 不管是 位置环度还是速度环度 应该都是用的PI调节器 对吧 在我们的motion中 其实它只用了一个(听不清)调节器 就可以完成对速度和位置环的控制 最大的好处就是(听不清)调节器只有一个带宽的参数需要调节 大家知道 如果PI的话 至少是两个参数 速度环路两个 再加上位置环路两个 至少四个参数要调 而且在不同速度和不同工况之下 这个参数调节 其实都是 有变化的 或者说我们需要不同组的参数 来适应不同的应用要求 所以我们认为非常的麻烦 我们曾经做过一个对比 这么复杂的系统 如果需要把所有的TI参数都整定好的话 可能需要 两到三天的时间 对比之下 用我们的motion的话 可能只需要10到20分钟的时间 就可以把整个参数整定完毕 这就是给大家带来的一个好处 就是控制方便 然后效率的一个提升 我们这边的话 实际上刚才也给大家讲了 我们的motion C2000里面INSTASPIN的MOTION最大的好处 如果用它来实现机器人的一个控制的话 一个就是 可以通过(听不清)motion的程序的话 来实现对于系统的惯量和摩擦系数的自动辨识 另外的话 我们辅助模块 可以通过(听不清)调节器 来实现单变量参数的调节 所以非常的方便 那么基于运动控制的话 其实除了基本的速度环路和位置环路 其实还有非常多关于速度和位置的运行要求 比如说 大家经常会看到 我需要在多点的速度段进行运行 我们就有相关的目录和plan相关的模块的话 大家通过配置一定的参数 就可以实现多点运行 而且每个点的速度 加速度 最关键是我们还可以对加加速度进行一些设置 这个就是我们motion主要的一个特点 那么 关于带有INSTASPIN算法的MCU我们现在主要是在C2000的系列当中 目前集成了 INSTASPIN FOC算法的话是我们的02X 03X和 02X 和06X系列 05X 06X系列 如果是motion的话 目前的话就是05X和06X两个系列当中 会固话motion之间的算法 所以有了INSTASPIN不管是FOC还是motion的话 我们就是针对现在大家在工业自动化领域当中经常用到的三相电机 不管是无刷电机 同步电机还是异步电机 我们其实可以基于INSTASPIN 在短时间让电机完成比较好的运行 我们这边说到我们可以在短短几分钟之内 如果大家拿到一台之前完全没有调试过的电机 但是基于INSTASPIN的话 在几分钟内就可以把电机转起来 这个的话 实际就是INSTASPIN最大的一个优势 实际上 INSTASPIN现在已经在很多工业领域当中 得到了非常广泛的应用 大家如果将来对于这个 这边提一下 FOC是基于无传感器的矢量控制 motion的话主要是基于有位置的控制 包括伺服的一些应用 关于motion的话 我们这边主要强调一下 它的一个特点 刚才其实也陆陆续续讲了 主要就是说 它是单(听不清)就可以完成位置环和速度环的调节 而且我们可以稳定地保持在0位置 就是大家在伺服里面经常看到的话 我需要它稳定地停在某一个位置上面 在两个位置之间运行的话 我们可以控制它的加加速度 这个也是motion应用的一个优势 另外的话 在不同位置之间的切换的话 也就会非常方便 所以 通过motion来实现伺服的一个设计的话 是非常方便和快速的 这边还有找到了 大家如果是在机器人领域里面也好 经常会碰到的 刚才我们也看到了 工业机器人当中 他可能会有多个电机 多个电机的话 我们现在C2000 06XM系列 就可以实现 单芯片双电机 基于磨损的控制 我们这边的话 大概是90个mix的0落差 基本上50个mix可以做电梯控制 然后40个mix加协处理器可以做一些 应用层一些代码的设计 两个电极之间的协同控制的话我们可以通过plan模块来实现 这个部分的话 如果大家关注多轴的话 我们现在在最新的INSTASPIN这个参考样例的程序集 Motor Wear 里面的话 已经有相关的硬件资料可以提供给大家 关于双电机软件代码框架可能会到下一版Motor Wear会 大家可以看到参考的样例程序 提到电机的话 不得不说的是在伺服方面 其实它的传感器也是非常重要的方面 其实在伺服领域 我们需要提供它的位置 我们这边特别给大家提到的是我们刚刚 才发布的一个 叫position encoder manager的一个算法 我们有特定的芯片来支持这样一个算法 我们这边来看一下 其实在伺服里面的话 大家要做精确的位置控制 肯定会有一些相关的速度或者位置传感器 常用的话 是增量式的编码器 当然增量式的编码器得到的是相对位置 而且成本会比较低 通过C2000的QEP的话 直接就可以计算它的速度 如果需要精度比较高 需要得到绝对位置的话 可能需要采用绝对位置的编码器 绝对编码器的话实际上现在有多种协议支持 包括常用的有 indata (听不清)等等这样的一些协议 还有一种我们可以获得电机速度或者位置的一个传感器 我们也会经常用到 就是悬变 悬变输出的是sin 和sin的角度 所以我们需要特定的算法或者相关的一些专门的芯片来做解码 我可以简单提供我们需要的角度值 实际上大家看到 不管采用什么样的传感器来检测速度 其实都需要做一定的计算和转换 就是基于这样一个考虑 特别是在伺服里面 其实大家现在越来越多考虑用绝对式的编码器 所以我们会集成了position encoder manager 这个实际上通过C2000芯片中的一些外设 大家可以看到这边罗列的一些外设 我们来实现对于绝对式编码器 解码的一个算法 我们目前支持的协议包括indata hyper data等等 这样一些绝对式编码器都可以 来实现解码 目前 支持这些解码的 带有position encoder manager 的 芯片有37XD S 07X以及我们明年会推出的004X系列 都会包含position encoder manager 大家如果关注关于解码的一些应用的话 可以去更新我们C2000的资料集 叫(听不清) 如果大家有安装的话 可以更新一下 把它更新到最新的3.3.7版本 应该是上周刚刚 position manager的话 已经发布在最新的版本里面 大家可以去看一下 那么关于伺服和相关的速度的一些传感器的解码的一些评估板 大家这里 可以看到 我们有非常多的支持 这些都是基于C2000的 这边的话 实际上我们有工业驱动的套件 还有包括我们(听不清)以及旋变的解码的套件 这个悬变解码是通过我们的C2000 比如说28035 28335 通过软件来实现的 大家可以基于这个评估板 因为这个上面带有激励 可以把它和(听不清)相连 然后可以对它的角度进行结算 做一个评估 position manager的话大家如果要评估的话 就需要通过377D的评估板来实现 刚才讲到的其实是我们的绝对式编码器 包括悬变的解码 悬变的解码的话 其实我们有几种方式 一种通过软件的方式来实现 刚刚给大家讲到 我们C2000可以来解码 另外的话 TI也有悬变解码的芯片 专用的芯片 目前的话 是拼接421 之前的话 BGA411大家也可以在网上查到相关资料 其实411和421 最主要的是411里面带有一个(听不清) 而421里面是没有的 但421已经集成了包括放大器电源这样的功能 最主要的就是说 我们的421有支持62508的安全的特性 所以 如果说 大家用悬变的话 可以通过我们的PGA421实现解码控制 我们的421带来的最大的好处就是说 我们的集成度非常高 另外设计起来非常方便 还有我们是有安全特性 这个我想在工业应用中也是非常重要的一个趋势 就是关于安全性的一个要求 我们来看一下 如果常规的我们一个就是说 关于悬变解码的话 可能通过一个专门的解码芯片来实现 这边的话 外面还要加一些保护 还要包括一些(听不清) 如果通过普通MCU的话 可能需要通过高速ADC的端口实现 基于我们的PGA421的话 大家可以看到 外围电路非常简单 所以在成本和体积上有非常大的优势 所以这个是关于PGA421的 刚才其实讲到的是关于我们的 位置和速度的一个检测 在电机驱动上面的话 其实我们除了说 我们有专门的驱动芯片的话 可以给大家做一些 选择 我们有非常丰富的驱动芯片 比如说这边大家看到 我们有ERV8系列 和DRV10系列 这个都是大家可以通过不同的电机种类 找到对应的一些 驱动的芯片 比如说我们有固定电机的 还有有刷的 还有无刷的 这些都有 另外的话 其实我们还有DRV5系列 这个实际上是我们的霍尔传感器 所以大家有霍尔应用的话 TI也有专门的霍尔芯片给到大家可以来用 所有这些马达驱动芯片 主要分成两大类 一种是集成驱动 也就是除了(听不清)之外 我们会把后面的桥路 比如说mos的话 我们会把它包含在芯片当中 比如说像我们的DRV8312 DRV8412这些的话 除了有驱动部分 另外里面还有桥路 这样的话 整体的集成度就比较高 但是相对来说 电流相对比较小一些 还有一种是专门的门机驱动 我们叫他预驱 这样的话它其实不包含桥路的 大家如果用的话 外部需要专门加mos搭成的桥路 这个的话 实际上就是说 如果大家有电流比较高的要求的话 就可以通过选择不同的mos来实现 这个的话就是大家经常看到的 DRV8301 包括现在的DRV8305 这个系列都是出于预驱的一个马达驱动芯片 这个是关于这个电机控制
大家下午好 欢迎大家来参加我们的工业研讨会
下面这一部分内容是关于工业机器人和工厂自动化的
主要是给大家介绍TI在这两方面都有哪些相关的方案 能够给大家带来一些参考
如果大家基于这些应用做一些设计的话
其实可以给大家带来非常多的一些好处
我想 提到工业自动化 大家可能首先就会想到
最近非常热门的工业4.0对吧
其实4.0我们是讲到第四代工业技术革命的情况
实际工业4.0主要专注的方向是
趋势是网络化的趋势
另外基于提高效率的应用的方向
当然就是说 分项控制也是它主要的核心部分
基于工业4.0我们在中国要做哪些事情呢 其实在今年5月
我们国家提出了made in China中国制造2025
其实这个也是围绕工业4.0怎么样在我国实现基于工业4.0的突破
其实在中国制造2025当中 主要的一些
关注的点 我们可以看到 一个是制造集成化
包括我们绿色制造的概念
还有就是对于传统制造业的话 进行结构化的一些改造
那么 这个是关于我们当前工业自动化的情况
我们TI的话在目前基于工业4.0 工业应用的话 我们有哪些focus的部分
我们会分布在这些领域当中
首先的话 一个可变控制器 大家知道 实际上在
工业现场的话 这是一个非常重要的组成部分
那么 接下来的话 作为执行机构 大家经常会提到
比如说 也是最近两年非常热门的工业机器人
对于工业机器人来说 实际它有很多部分构成
主要的执行机构 比如说我们有一些EV器
伺服驱动器 以及相关的一些跟自动化相关的模块
我们在所有的方面 都会有大大小小的一些方案可以给大家做一些参考
我们现在就一个工业机器人来看 我们具体来各个部分的应用情况
左边我们可以看到 是工业机器人的控制器
这个控制器 其实包含很多部分
比如说 我们一般会有一个人机界面
另外会有一个主控的板
当然还会有一个伺服控制的板
包括电源部分的一些电路
在以控制器为硬件基础的话
在这之上我们会有一些软件模块来支持界面的一些应用
对于机器人来说的话 实际它主要的核心部分它要动起来
对吧 我们说的motion的话 实际上大家可以看到 这些连接的部位的话 我们都是通过
最主要是通过伺服电机 当然是包括伺服电机控制会带有一定的传感器
编码器 在它的前端的话
会有一些扩展的轴 这上面一般有固定电机
还有包括像传感器 这些的一个部件
整个的话 这个前端实际是一个伺服系统
对于底座来说 可能主要是一些线缆还有一些变动器这些
装置 所以在这些部分
我们可能有精密变速的需求
所以大家可以看到 其实 另外的话 其实我们
工业的物联网现在也是非常热门的方向
这边的话其实包括无线互联 云服务器等等应用
都会是一个发展趋势 大家这里看到了
我们所有的各个部件 其实我们都有相关部件可以给到大家
作参考 所以非常丰富的应用
我们现在把刚才这个基于刚才工业机器人
我们看一下在工业机器人上面TI有哪些创新技术
其实大家知道 TI有非常丰富的产品系列
涵盖了 我们知道 在世界当中 有很多物理量
这些物理量我们需要进行采样
进行一些转换
我们所有的TI芯片都会涵盖转换 包括处理的一些应用当中
全部都会涵盖到
我们还是回到刚才的主题 关于运动控制
就是在工业机器人中最主要的一个部分
大家知道 对于一个工业机器人来说
实际上它是一个非常复杂的运动控制的一个过程
其实在这里面可能有多个伺服电机需要进行调试
大家知道 调试是非常耗时 麻烦的一个工作
而且对于这样一个机器人来说 它的工作状态
有非常多的方式 比如它经常要以非常快的速度运行
甚至超过2倍的运转速
但是它有的时候 需要以非常低的转速进行运行
当然就是说随着负载的一个变化 或者说本身惯量变化的要求
有的时候会超过8倍的惯量变化
对于这样一个复杂的系统的话 其实我们整个开发和调试 也是
相当复杂 我们现在的话 其实基于运动控制
我们的C2000系列中包含了Motion的算法
这个算法的话 从非常大的程度之上 能帮大家减少调试麻烦的程度
我们其实采用一种新型的叫(听不清)调节器替代PI传统的调节器
大家知道 我们的传统伺服里面 不管是
位置环度还是速度环度 应该都是用的PI调节器 对吧
在我们的motion中 其实它只用了一个(听不清)调节器
就可以完成对速度和位置环的控制
最大的好处就是(听不清)调节器只有一个带宽的参数需要调节
大家知道 如果PI的话 至少是两个参数
速度环路两个 再加上位置环路两个
至少四个参数要调
而且在不同速度和不同工况之下 这个参数调节 其实都是
有变化的 或者说我们需要不同组的参数
来适应不同的应用要求
所以我们认为非常的麻烦
我们曾经做过一个对比 这么复杂的系统 如果需要把所有的TI参数都整定好的话 可能需要
两到三天的时间
对比之下 用我们的motion的话 可能只需要10到20分钟的时间
就可以把整个参数整定完毕
这就是给大家带来的一个好处 就是控制方便 然后效率的一个提升
我们这边的话 实际上刚才也给大家讲了 我们的motion
C2000里面INSTASPIN的MOTION最大的好处
如果用它来实现机器人的一个控制的话
一个就是 可以通过(听不清)motion的程序的话
来实现对于系统的惯量和摩擦系数的自动辨识
另外的话 我们辅助模块 可以通过(听不清)调节器
来实现单变量参数的调节
所以非常的方便 那么基于运动控制的话
其实除了基本的速度环路和位置环路
其实还有非常多关于速度和位置的运行要求 比如说
大家经常会看到 我需要在多点的速度段进行运行
我们就有相关的目录和plan相关的模块的话
大家通过配置一定的参数
就可以实现多点运行
而且每个点的速度 加速度 最关键是我们还可以对加加速度进行一些设置
这个就是我们motion主要的一个特点
那么 关于带有INSTASPIN算法的MCU我们现在主要是在C2000的系列当中
目前集成了 INSTASPIN FOC算法的话是我们的02X 03X和
02X 和06X系列 05X 06X系列
如果是motion的话 目前的话就是05X和06X两个系列当中
会固话motion之间的算法
所以有了INSTASPIN不管是FOC还是motion的话
我们就是针对现在大家在工业自动化领域当中经常用到的三相电机
不管是无刷电机 同步电机还是异步电机
我们其实可以基于INSTASPIN 在短时间让电机完成比较好的运行
我们这边说到我们可以在短短几分钟之内
如果大家拿到一台之前完全没有调试过的电机
但是基于INSTASPIN的话 在几分钟内就可以把电机转起来
这个的话 实际就是INSTASPIN最大的一个优势
实际上 INSTASPIN现在已经在很多工业领域当中
得到了非常广泛的应用 大家如果将来对于这个
这边提一下 FOC是基于无传感器的矢量控制
motion的话主要是基于有位置的控制
包括伺服的一些应用
关于motion的话 我们这边主要强调一下 它的一个特点 刚才其实也陆陆续续讲了
主要就是说 它是单(听不清)就可以完成位置环和速度环的调节
而且我们可以稳定地保持在0位置
就是大家在伺服里面经常看到的话 我需要它稳定地停在某一个位置上面
在两个位置之间运行的话 我们可以控制它的加加速度
这个也是motion应用的一个优势
另外的话 在不同位置之间的切换的话 也就会非常方便
所以 通过motion来实现伺服的一个设计的话
是非常方便和快速的
这边还有找到了 大家如果是在机器人领域里面也好
经常会碰到的 刚才我们也看到了 工业机器人当中
他可能会有多个电机
多个电机的话 我们现在C2000 06XM系列
就可以实现 单芯片双电机 基于磨损的控制
我们这边的话 大概是90个mix的0落差
基本上50个mix可以做电梯控制 然后40个mix加协处理器可以做一些
应用层一些代码的设计
两个电极之间的协同控制的话我们可以通过plan模块来实现
这个部分的话 如果大家关注多轴的话
我们现在在最新的INSTASPIN这个参考样例的程序集
Motor Wear 里面的话 已经有相关的硬件资料可以提供给大家
关于双电机软件代码框架可能会到下一版Motor Wear会
大家可以看到参考的样例程序
提到电机的话 不得不说的是在伺服方面
其实它的传感器也是非常重要的方面 其实在伺服领域
我们需要提供它的位置 我们这边特别给大家提到的是我们刚刚
才发布的一个 叫position encoder manager的一个算法
我们有特定的芯片来支持这样一个算法
我们这边来看一下 其实在伺服里面的话
大家要做精确的位置控制 肯定会有一些相关的速度或者位置传感器
常用的话 是增量式的编码器
当然增量式的编码器得到的是相对位置
而且成本会比较低
通过C2000的QEP的话 直接就可以计算它的速度
如果需要精度比较高 需要得到绝对位置的话 可能需要采用绝对位置的编码器
绝对编码器的话实际上现在有多种协议支持 包括常用的有 indata
(听不清)等等这样的一些协议
还有一种我们可以获得电机速度或者位置的一个传感器
我们也会经常用到 就是悬变
悬变输出的是sin 和sin的角度
所以我们需要特定的算法或者相关的一些专门的芯片来做解码
我可以简单提供我们需要的角度值
实际上大家看到 不管采用什么样的传感器来检测速度
其实都需要做一定的计算和转换
就是基于这样一个考虑 特别是在伺服里面
其实大家现在越来越多考虑用绝对式的编码器
所以我们会集成了position encoder manager
这个实际上通过C2000芯片中的一些外设
大家可以看到这边罗列的一些外设 我们来实现对于绝对式编码器
解码的一个算法
我们目前支持的协议包括indata hyper data等等 这样一些绝对式编码器都可以
来实现解码 目前 支持这些解码的 带有position encoder manager 的
芯片有37XD S 07X以及我们明年会推出的004X系列
都会包含position encoder manager
大家如果关注关于解码的一些应用的话
可以去更新我们C2000的资料集 叫(听不清)
如果大家有安装的话 可以更新一下
把它更新到最新的3.3.7版本
应该是上周刚刚 position manager的话 已经发布在最新的版本里面
大家可以去看一下
那么关于伺服和相关的速度的一些传感器的解码的一些评估板 大家这里
可以看到 我们有非常多的支持
这些都是基于C2000的
这边的话 实际上我们有工业驱动的套件
还有包括我们(听不清)以及旋变的解码的套件
这个悬变解码是通过我们的C2000
比如说28035 28335 通过软件来实现的
大家可以基于这个评估板 因为这个上面带有激励
可以把它和(听不清)相连 然后可以对它的角度进行结算 做一个评估
position manager的话大家如果要评估的话 就需要通过377D的评估板来实现
刚才讲到的其实是我们的绝对式编码器
包括悬变的解码
悬变的解码的话 其实我们有几种方式 一种通过软件的方式来实现
刚刚给大家讲到 我们C2000可以来解码
另外的话 TI也有悬变解码的芯片
专用的芯片 目前的话 是拼接421
之前的话 BGA411大家也可以在网上查到相关资料
其实411和421 最主要的是411里面带有一个(听不清)
而421里面是没有的 但421已经集成了包括放大器电源这样的功能
最主要的就是说 我们的421有支持62508的安全的特性
所以 如果说 大家用悬变的话 可以通过我们的PGA421实现解码控制
我们的421带来的最大的好处就是说
我们的集成度非常高 另外设计起来非常方便
还有我们是有安全特性
这个我想在工业应用中也是非常重要的一个趋势
就是关于安全性的一个要求
我们来看一下 如果常规的我们一个就是说
关于悬变解码的话 可能通过一个专门的解码芯片来实现
这边的话 外面还要加一些保护 还要包括一些(听不清)
如果通过普通MCU的话 可能需要通过高速ADC的端口实现
基于我们的PGA421的话 大家可以看到
外围电路非常简单
所以在成本和体积上有非常大的优势
所以这个是关于PGA421的
刚才其实讲到的是关于我们的
位置和速度的一个检测 在电机驱动上面的话 其实我们除了说
我们有专门的驱动芯片的话 可以给大家做一些
选择 我们有非常丰富的驱动芯片 比如说这边大家看到 我们有ERV8系列
和DRV10系列
这个都是大家可以通过不同的电机种类 找到对应的一些
驱动的芯片 比如说我们有固定电机的
还有有刷的 还有无刷的
这些都有 另外的话 其实我们还有DRV5系列
这个实际上是我们的霍尔传感器
所以大家有霍尔应用的话 TI也有专门的霍尔芯片给到大家可以来用
所有这些马达驱动芯片
主要分成两大类 一种是集成驱动 也就是除了(听不清)之外
我们会把后面的桥路 比如说mos的话 我们会把它包含在芯片当中
比如说像我们的DRV8312
DRV8412这些的话 除了有驱动部分 另外里面还有桥路
这样的话 整体的集成度就比较高
但是相对来说 电流相对比较小一些
还有一种是专门的门机驱动
我们叫他预驱
这样的话它其实不包含桥路的 大家如果用的话
外部需要专门加mos搭成的桥路
这个的话 实际上就是说 如果大家有电流比较高的要求的话
就可以通过选择不同的mos来实现
这个的话就是大家经常看到的 DRV8301 包括现在的DRV8305
这个系列都是出于预驱的一个马达驱动芯片
这个是关于这个电机控制
手机看
扫码用手机观看
-
 未学习 TI 工业机器人技术概览 (1)
未学习 TI 工业机器人技术概览 (1)
00:19:46
播放中
 视频简介
视频简介
TI 工业机器人技术概览 (1)
所属课程:TI 工业机器人技术概览 (1)
发布时间:2016.01.15
视频集数:1
本节视频时长:00:19:46
TI在工业机器人与工厂自动化的相关方案。