搜索
手机课堂
登 录
注 册
首 页
最新课程
最新课程
最新产品
下载中心
首页
>
产品
>
微控制器 (MCU) 和处理器
>
如何实现马达控制
>
基于 Arm 的处理器
+
产品
(1079)
模拟与混合信号
(326)
电源管理
(378)
DLP产品
(32)
微控制器 (MCU) 和处理器
(264)
无线连接
(89)
+
工具与软件
(46)
设计工具和仿真
(35)
嵌入式开发
(8)
现场培训
(7)
+
应用与设计
(214)
工业应用
(84)
汽车
(78)
通信设备
(3)
个人电子产品
(13)
中国新基建
(28)
最新课程
TPS61290 Boost Converter 介绍
数字电源控制器简介
TI 磁感应仿真器 (TIMSS)
TI 高精度实验室:使用电机驱动器进行设计
人形机器人中的电源供应方案介绍
TPS6286A06同步直流降压转换器介绍
C7000编译器:软件流水线反馈(第二部分)
C7000编译器:软件流水线反馈(第一部分)
C7000 编译器:可扩展向量
C7000 编译器:向量比较和谓词
热门课程
实验性电力电子课程和参考
汽车应用中的 Jacinto™ 7 处理器
TI 高精度实验室 – ADC系列视频
TI HVI系列培训
TI 高精度实验室系列课程 - 运算放大器
视频系列:tiarmclang 编译器
借助 AI 驱动的 CCStudio™ IDE 加速开发
电机控制之旋变及位置反馈解决方案
TI 高精度实验室-接口
EngineerIt 系列课程
如何实现马达控制
Loading the player...
将在
30
s后自动为您播放下一课程
重播本课程
重播本课程
电源设计小贴士42:可替代集成MOSFET的分立器件
保证电池供电设备安全
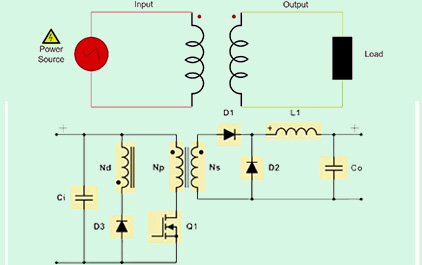
隔离拓扑简介
隔离式调制器简介
1.TI 电源管理助力家电能效创新
视频报错
手机看
扫码用手机观看
收藏本课程
未学习
如何实现马达控制
00:14:13
播放中
播放中
视频简介
如何实现马达控制
所属课程:
如何实现马达控制
发布时间:
2014.08.14
视频集数:
1
本节视频时长:
00:14:13
InstaSPIN 软件和硬件设计上需要修改的参数及注意事项,IPD算法介绍。

 未学习 如何实现马达控制
未学习 如何实现马达控制
 视频简介
视频简介